
基于Hdot指令的舰载机两种动力补偿控制系统研究
2022-08-11 03:49张杨周益颜仙荣尹大伟钱国红
航空工程进展 2022年4期
张杨,周益,颜仙荣,尹大伟,钱国红
(海军研究院92728部队,上海 200436)
0 引 言
舰载机着舰相比岸基飞机降落,着舰环境更为复杂。传统基于控制姿态的着舰飞控系统无法有效抑制舰尾流的干扰,鲁棒性较差,着舰精度较低。而Hdot着舰飞控系统可明显抑制大气紊流的扰动。以美国F-14A飞机为例,传统的姿态控制系统纵向着舰误差为54.7 ft(1 ft=0.304 8 m),而采用由气压高度表/加速度计获得Hdot的控制系统误差为23.7 ft,经过不断改进和试验,由SPN-42垂直误差/加速度计获得Hdot的纵向着舰误差仅为21.6 ft。
同时,舰载机着舰低动压处于速度—阻力的反区,造成速度不稳定,此时舰载机的飞行轨迹不可控。引入动力补偿系统(APCS)可确保舰载机的长周期稳定性,提高舰载机着舰轨迹的动态响应速度和控制精度。APCS主要用来自动调节舰载机的着舰速度和高度,通过油门自动调节来控制飞机进场速度并使其保持恒定值。一方面可实现速度的稳定,另一方面实现轨迹的跟踪控制,因此可在很大程度上减轻飞行员的操纵负担。国内外对APCS进行了设计研究,张玉洁等证明飞行迎角恒定系统可在加快飞机的动态响应、保持稳态迎角不变的同时,保持速度恒定,与速度保持系统达到同样的效果;钟涛针对F/A-18A引入飞机姿态控制系统来解决俯仰控制不稳定的问题,在满足一级飞行品质的条件下,设计PID参数完成对速度保持进场动力补偿系统的设计,解决航迹角无法稳定跟踪俯仰角的问题;焦晓辉等对基于迎角恒定,引入迎角、法向加速度和舵面反馈信号的动力补偿系统的参数进行优化;满翠芳等提出了一种模糊自适应PID控制参数整定方法,将模糊控制思想和PID控制技术有机地结合起来,实现了舰载机进场动力补偿系统智能化设计和PID参数在线自整定;R.Urnes等对基于Hdot指令的动力补偿系统开展了速度APCS仿真分析。
可以看出,目前关于动力补偿系统的研究,多是基于控制姿态进行设计的,而针对抑制舰尾流干扰的Hdot飞控系统的研究鲜少。基于此,本文针对抗舰尾流干扰的Hdot着舰飞控系统,对其两种APCS进行理论分析和仿真研究。首先对迎角保持APCS和速度保持APCS两种进场APCS进行设计,其次进行基于Hdot指令下APCS的仿真分析,然后分析风干扰情况下的动力补偿响应情况,最后通过仿真结果对比分析两种APCS的原理并给出初步结论。
1 基于Hdot指令的两种APCS设计

图1 姿态θ指令下的飞行控制系统Fig.1 Flight control system under attitude command
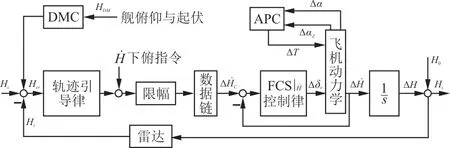
图2 Hdot指令下的飞行控制系统Fig.2 Flight control system under Hdot command
为了使舰载机轨迹角对姿态角有良好的跟踪能力,必须对发动机进行推力控制,形成速度恒定(Δ=0)或迎角恒定(Δ=0)的飞行/推力综合控制。之前的发动机推力由飞行员操纵,飞行员必须集中注意力同时操纵舰载机舵面和发动机油门,飞行员负担极大,而APCS可以很好地解决以上问题。
APCS有两种方案,一种是保持速度恒定的APCS,将速度反馈到发动机,本文写作APCS|;另一种是保持迎角恒定的APCS,将迎角反馈到发动机,本文写作APCS|。
1.1 速度保持动力补偿系统
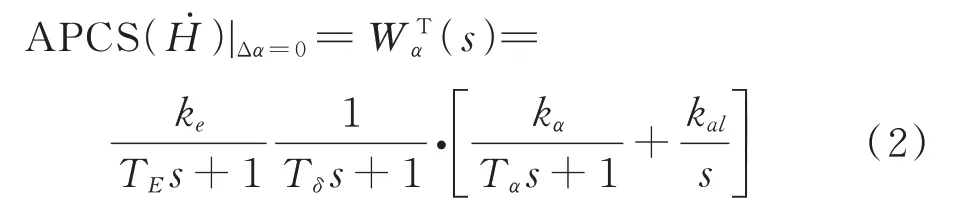
APCS|的工作原理是反馈飞机的速度变化信号Δ,经过一定的控制规律变换后引入油门,通过改变发动机油门偏度来改变推力,从而达到保持速度恒定的目的,进而使飞机航迹角Δ跟踪上俯仰角Δ的变化。
有APCS时,飞机Δ对Δ的响应结构图如图3所示,可以看出:APCS|的主要输入信号是飞机的水平速度变化量Δ,该信号主要来源于大气数据计算机。APCS|相当于增加速度稳定导数,抑制由姿态变化引起的速度变化,改善长周期运动阻尼。该方法的不足是存在跟踪静差。

图3 有APCS时Δγ对Δθ的响应结构图Fig.3 Structure diagram ofΔγresponse toΔθwith APCS
1.2 迎角保持动力补偿系统
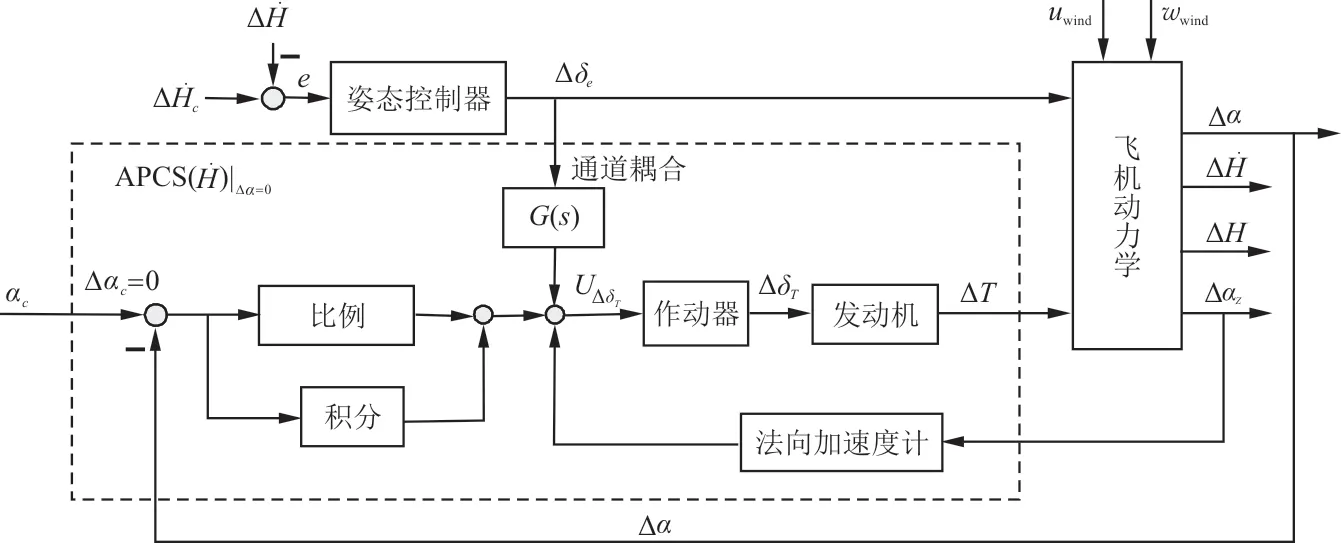
图4 Hdot指令下的迎角保持动力补偿系统Fig.4 Constant power compensation system for angle of attack under Hdot command
2 基于Hdot指令下的两种APCS仿真分析
将整个飞行控制系统分为纵向和侧向两个方向进行控制律设计。本文只考虑纵向方向同时考虑APCS的设计。其飞行控制系统具有如下表达形式:
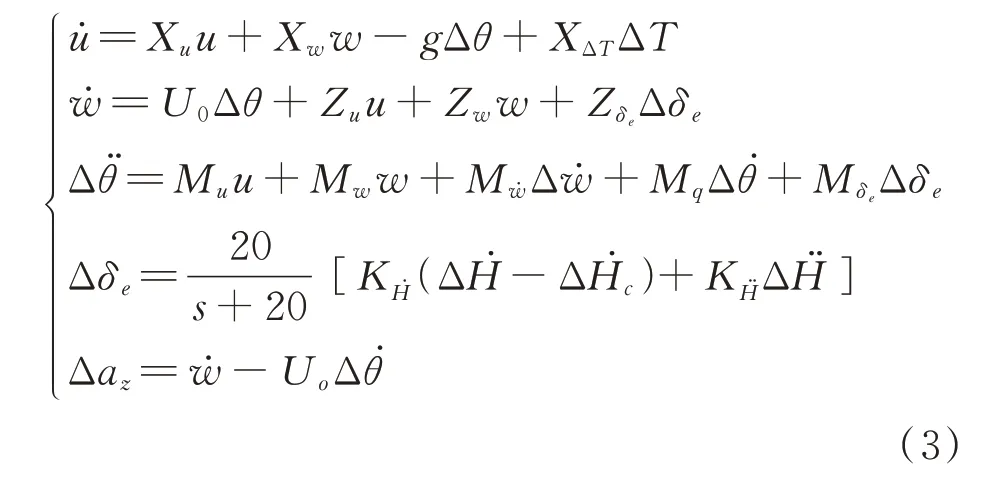
本文设计的基于Hdot指令的舰载机升降舵控制律可表示为
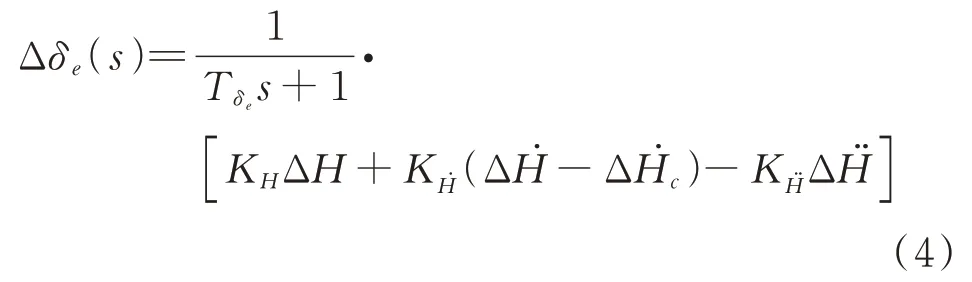
式中:K 、K 为控制律增益参数;K 为反馈增益。
引入Δ¨反馈,是为了通过预测舰载机高度变化率的趋势,有效增加系统的阻尼和相位裕度,以加快系统的动态响应特性。
此时,两种APCS的控制律分别为



2.1 不考虑风干扰
参考文献[14]中的某型舰载机纵向线性模型数据,在舰载机着舰状态进行配平时的速度为70 m/s,轨迹角为-3.5°。首先,在不考虑风干扰情况下进行仿真,在1 s时加入1.2 m/s的Hdot指令。选择1.2 m/s的原因是在轨迹角能理想跟踪俯仰角的情况下,1°姿态角变化引起1°轨迹角变化,在240 km/h的着舰速度能理想保持的情况下,1°的轨迹角变化量在几何上等价于1.2 m/s高度的变化量(Hdot)。仿真结果如图5所示。

图5 Hdot指令下的两种APCS仿真Fig.5 Two APCS simulations under Hdot command
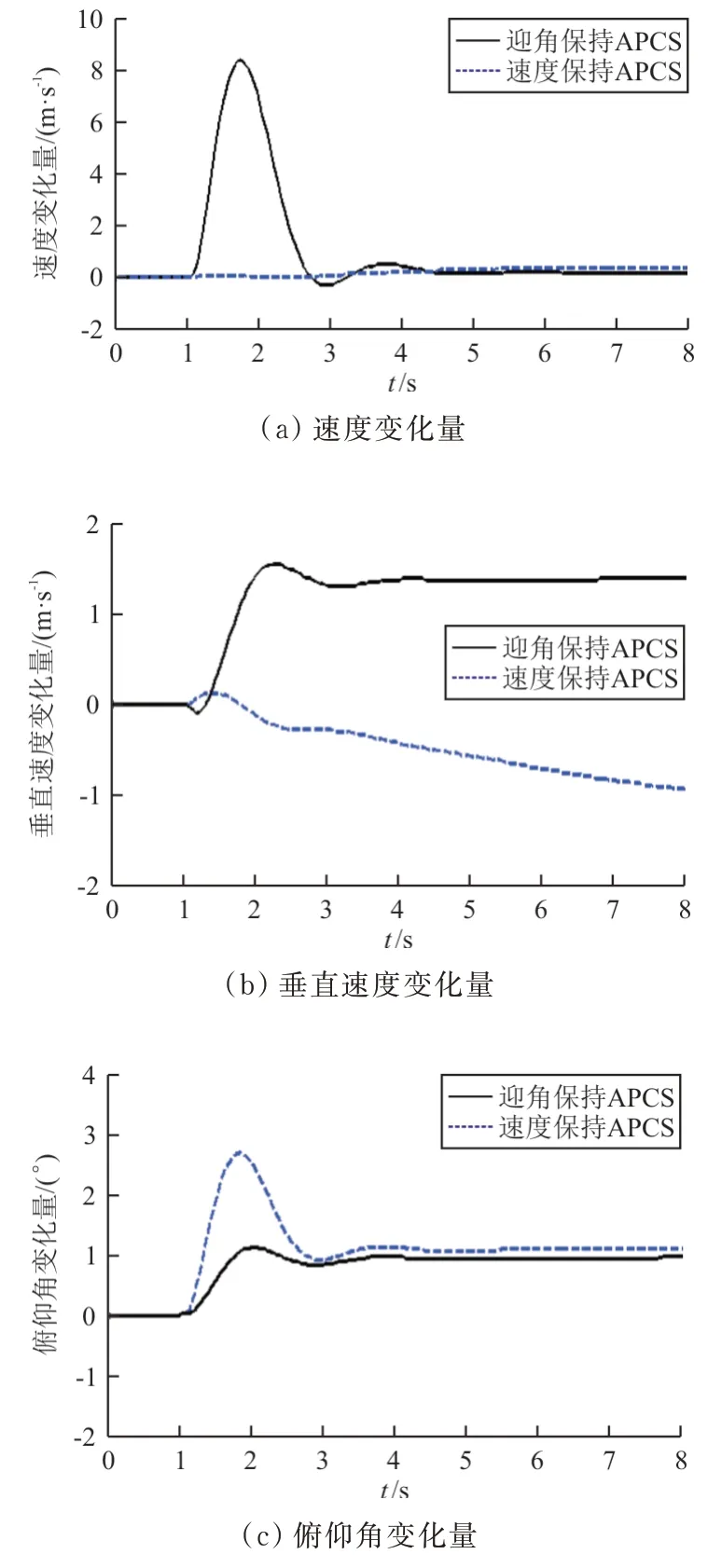
从图5可以看出:
(1)速 度 响 应 方 面,APCS|比APCS|性能好。APCS|在0.3 s内在较小范围内波动,且在指令输入后的4 s左右实现跟踪误差收敛到0;
(2)在俯仰角、轨迹角和迎角的响应方面,APCS|比APCS|性 能 更 优。APCS|响应更快,在9 s左右实现轨迹稳态跟踪;但是APCS|比APCS|的发动机推力变化大,超调量较大。
2.2 考虑风干扰
仿真1 s后考虑单位脉冲的垂直风干扰,研究垂直方向舰载机响应。考虑风干扰情况的Hdot指令下两种APCS仿真结果如图6所示。
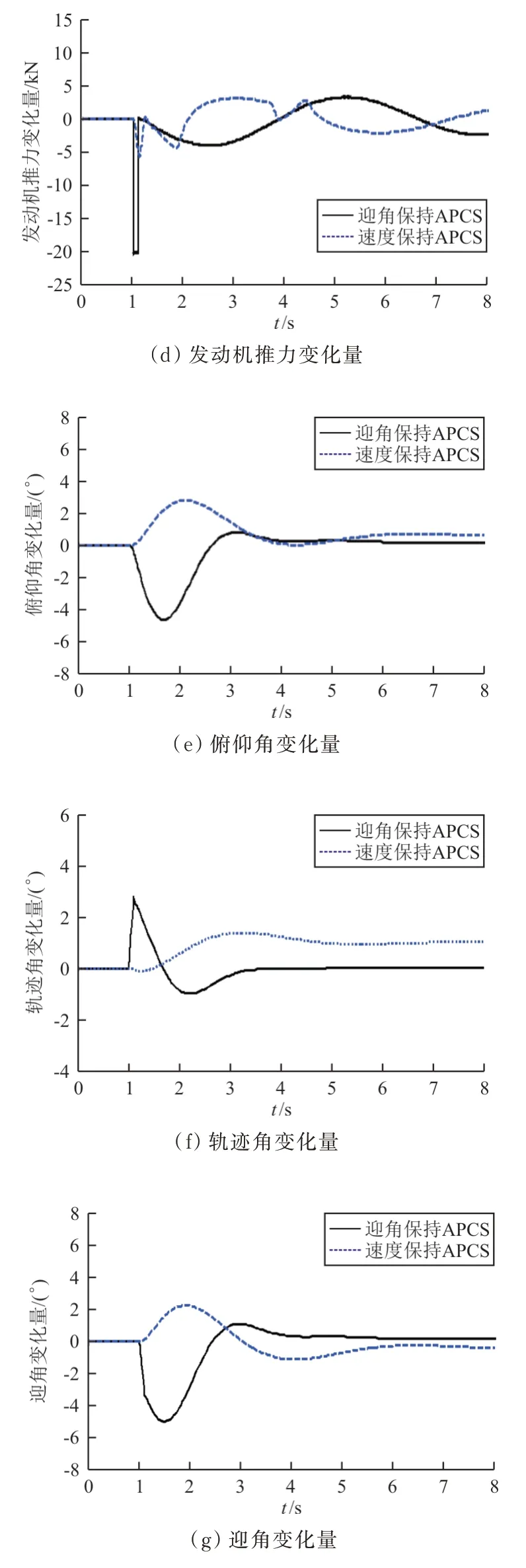
图6 风干扰下的Hdot指令下的两种APCS仿真Fig.6 Two APCS simulations under Hdot command with wind interference
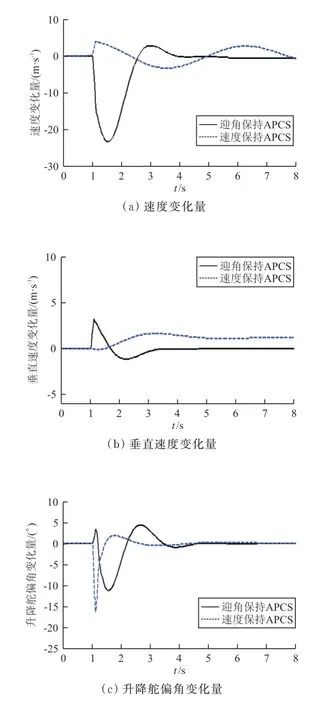
从图6可以看出:迎角保持APCS直接对法向的迎角进行控制,抑制迎角使得法向的姿态和轨迹等影响减弱,因此仿真图中的跟踪误差可实现快速收敛到0;而速度保持APCS是间接地抑制法向干扰,其最直接的是抑制速度,因此时间响应上较慢。
通过分析可得以下结论:
(1)迎角保持APCS在轨迹角、高度、俯仰角和迎角的受扰抑制方面,性能优于速度保持APCS。
(2)速度保持APCS在速度的受扰抑制方面,性能优于迎角保持APCS。
3 结 论
迎角保持APCS稳定迎角的能力大于速度保持APCS,其轨迹控制也比速度保持APCS要快。着舰飞机法向迎角、轨迹等响应远比切向速度的响应重要,因此采用迎角保持APCS控制效果更好,这也和美军的试飞结论相同。
目前已经有全权限数字控制发动机FADEC的飞机服役,例如F-22、F-35等。若舰载机装备使用FADEC,则不需要再配置APCS。FADEC可通过总线接收飞控的数据及指令,在自动着舰过程维持恒定的迎角/空速。而现在发动机控制则需要单独配置APCS以满足自动着舰要求。未来的发展趋势是,可以采用全权限的数字控制发动机FADEC取代目前的机械操纵APCS,精度更高,效率也会更高。
猜你喜欢
动漫界·幼教365(中班)(2022年1期)2022-01-13
福建中学数学(2021年1期)2021-02-28
小资CHIC!ELEGANCE(2021年44期)2021-01-11
科技创新与应用(2020年19期)2020-06-23
学校教育研究(2020年11期)2020-06-08
小资CHIC!ELEGANCE(2019年40期)2019-12-10
航空科学技术(2019年2期)2019-09-10
课堂内外(小学版)(2017年3期)2017-04-15
中小学心理健康教育(2014年7期)2014-04-21
中华少年(2009年9期)2009-09-14
