市政工程用定向钻机液压系统运动学参数标定技术
2022-09-05 06:25林集体
现代机械 2022年4期
林集体
(中铁十八局集团第五工程有限公司,天津 300450)
0 引言
定向钻机液压系统的工作原理为液压泵对定向钻机的钻头施加一定的轴向移动压力,控制悬挂移动钻具,实现钻具的快速换向。
系统的稳态特性可以满足钻井过程需要大扭矩的要求。然而,在系统工作初期,由于管道泄漏、油压压缩、液压泵出口压力等因素,系统的稳态性能难以预测,且定向钻机液压系统定向钻具的运动控制效果直接影响系统的工作性能,可能导致系统回路压力上升,影响液压系统正常工作和使用寿命。因此,需要对液压系统的运动学参数进行标定,进一步校准影响系统稳态的参数。其中,文献[1]研究了新型矿用钻机开孔定向仪的标定及误差补偿技术,确定误差来源,对高阶性误差进行辨识补偿,实现参数标定;文献[2]研究了基于无量纲化辨识雅可比矩阵选取测量位姿的Stewart并联机构运动学标定方法,实现对并联机构运动学的标定。
以往的方法虽然能够实现运动学参数标定,但是在不同的驱动力和阻尼力影响下,产生倾斜角误差,运动学参数标定效果较差,为此,设计一个市政工程用定向钻机液压系统运动学参数标定技术,以期解决当前存在的问题。
1 定向钻机液压系统动力学参数分析
1.1 确定系统稳态响应参数
定向钻机液压系统的动态特性是重点分析内容,即以系统的静力荷载,作为载荷线性结构稳态响应情况。对此,应该使用模态分析对定向钻机液压系统进行建模,以谐响应过程的非线性特征,结合系统固有频率,研究系统的动态特性和稳态响应参数。
首先,模态分析是研究物体结构动力学特征的一种近代方法,其主要以振动理论为基础[3],而在定向钻具的传动和控制中,由于该系统结构复杂,其动态特性会响应外界载荷的变化,导致系统偏离稳态,以此建模分析液压系统的动态特性,定向钻机液压系统稳态模型如下[4]:
(1)
公式(1)中,K代表液压系统动态特征参数,M代表系统固有振动频率,ω代表系统特有的振型,φi代表第i次振动时的动态特征向量。
其次,系统的动态特性会响应载荷,影响系统稳态,因此需要通过谐响应计算方法和静力学分析方法建模分析系统的稳态响应参数。
谐响应是指液压系统在外界载荷逐渐增加下的时间线性结构稳态响应情况[5]。在计算过程中,将激励开始时发生的瞬时振动排除在外,同时其他非线性特征也忽略,将谐响应的动力学方程表示为[6]:
F=(-ω2M+iωC+K)({φ1}+i{φ2})
(2)
公式(2)中,C代表质量矩阵。
最后,在此基础上进行静力学分析,静力学分析主要分析液压系统在恒定荷载作用下的稳态响应情况[7],将计算公式表示为:
ku=F
(3)
公式(3)中,k代表刚度矩阵,u为系统的位移矢量,F代表系统的静力荷载。
通过上述过程预先对系统模态分析与静力学分析,确定了系统的稳态响应参数。
1.2 构建定向钻机液压系统动力学模型
液压泵是整个定向钻机液压系统中的核心部分,通过施加轴向移动压力控制着定向钻机转向,因此需要对液压泵的运动压力建模。将液压泵的运动微分方程表示为:
L=xL+As(ps-pL)-Fs
(4)
公式(4)中,xL代表阀芯位移参数,As代表控制腔的作用面积,ps代表液压泵的出口压力参数,pL代表负载反馈口的压力参数,Fs代表阀弹簧预调力。
在定向钻机液压系统动态分析过程中,位置和位姿是会发生改变的,所以使整个系统的驱动力和阻尼力状况有所不同,联立上述公式,将定向钻机液压系统的动力学模型表示为:
(5)
通过定向钻机液压系统动力学模型,为系统动力学参数标定提供基础。
2 定向钻机液压系统运动学参数标定实现
2.1 构建倾斜角校准误差模型
为了描述定向钻机液压系统运动学位姿,设基准参考系原点为:
P=[px,py,pz]T
(6)
公式(6)中,px、py、pz分别代表坐标系中的3个坐标分量。
建立上述坐标系后,进行运动学变换,将运动学模型表示为:
f(θ)=gfE0*fE0
(7)
公式中,fE0代表系统相对于基础坐标系的位置矩阵,g代表矩阵变换参数。
为了计算寻北系统坐标轴与安装轴之间的补充和误差,需要构建倾斜角校准误差模型。将带误差值的模型表示为:
(8)
在此基础上,进一步对误差计算,定向钻机液压系统实际运动距离与指定距离会存在一定的偏差,为此将距离误差模型引入到其中,将两点之间的距离误差表示为:
Δl=|pM2-pM1|-|pB2-pB1|
(9)
公式中,pM2、pM1分别代表距离点,pB2、pB1代表实际位置的参数点。
将两点之间的距离误差与位置误差关系表示为:
(10)
公式中,dp代表在基础坐标系中某一点的位置偏差向量。
上述计算的误差中不包含位移信息,这会导致计算模型出现复共线性特征,导致原始辨识矩阵发生错误,为此在上述计算的基础上设置约束条件,将计算公式表示为:
Δex,2=Δey,d=Δey,3=0
(11)
公式中,Δex,2、Δey,d、Δey,3分别代表位置向量。
经过上述计算保证辨识矩阵满秩,将无偏估计公式表示为:
(12)
公式中,H*代表伪逆矩阵。
上述计算中,通过H的选择能够使模型包含充足的解释信息并能够应对计算模型中的共线性特征,从而利用较少的数据对位置的末端误差测量。
2.2 定向测量位形优选
增加位形测量参数,以提高后续倾斜角校准误差补偿的效果。将残差均方根的计算公式表示为:
(13)
公式中,SEy为转角在任意一个位形下的测量误差函数,fE代表任意一个位形下的误差预估函数。
通过上述计算能够对末端误差估计值与真实值之间的差距进行反映,但是由于实际计算中位移误差值会随着真实位移发生变化,为此需要进一步对随机误差测量,将残差比例指标定义为:
(14)
进行测量的残差分析,将公式表示为:
ηE,x[fc]={ηE,y|fC=[fC]}
(15)
公式(13)中,fC代表计算过程中的累积频率,[fC]代表预先给定的置信度水平,ηE,y代表残差比例。
通过上述计算对测量位形优选,并对末端位姿测量,提高辨识方法的鲁棒性。
2.3 倾斜角校准误差补偿
若想进行参数标定需要对传感器倾斜角校准误差补偿,加速度误差模型如(6)式所示:
(16)
矩阵中,fa、fb、fc分别为三轴加速度的输出值,m1、m2、…、mnm分别代表误差模型建立中的相互交叉影响系数,pa、pb、pc分别代表传感器中加速度非线性误差系数。
在加速度倾斜角校准误差补偿中,为了增加加速度非线性误差系数,提高标定精度,对陀螺传感器倾斜角校准误差进行补偿,该精度决定了系统的跟踪精度,定向钻机液压系统的倾斜角校准误差补偿的计算公式表示为:
(17)
公式中,λi、λj分别代表待辨识的参数,p代表空间降维参数,参考公式(1)和公式(11),将误差补偿模型表示为:
(18)
2.4 运动学参数标定
按时间顺序进行一系列采样,每一个采样值之间都有一定的相关性,时间序列分析模型通过对这些数据建模,挖掘出序列间存在的规律,使其反映系统静态输出特性,获得运动学参数变化规律,表示为:
V=∂1xk-1+∂2xk-2+ak-θ1ak-1
(19)
公式(19)中,∂1、∂2分别代表时间差序列,xk-1、xk-2分别代表静态输出参数,ak代表自然回归参数,θ1代表滑动平均参数。
在此基础上,将卡尔曼滤波方法应用到其中,以递推形式描述定向钻机液压系统稳态方程,表示为:
X(k)=A(u-1)+BW(u)
(20)
公式(20)中,u代表液态系统的动力学参数,B代表噪声参数,A代表系统动态参数,W代表随机误差参数。
将计算结果与稳态响应参数进行对比,对状态向量最优值估计,估计过程如下:
(21)
公式(21)中,AJ代表第J个参数的状态向量最优估计值,Ak-1代表第k步的状态方程。
以此增加位形测量参数,反映末端误差估计值与真实值之间的差距,将残差比例指标应用到优选中,动态地获取残差比例指标,状态向量最优值越低,运动学参数标定效果越好,实现定向钻机液压系统运动学参数标定。
3 实验对比
为验证定向钻机液压系统运动学参数标定技术的应用效果,进行实验,并将新型矿用钻机开孔定向仪的标定及误差补偿技术、基于无量纲化辨识雅可比矩阵的标定方法与所研究方法进行对比。
3.1 实验准备
此次研究应用到的定向钻机主要技术参数如表1所示。
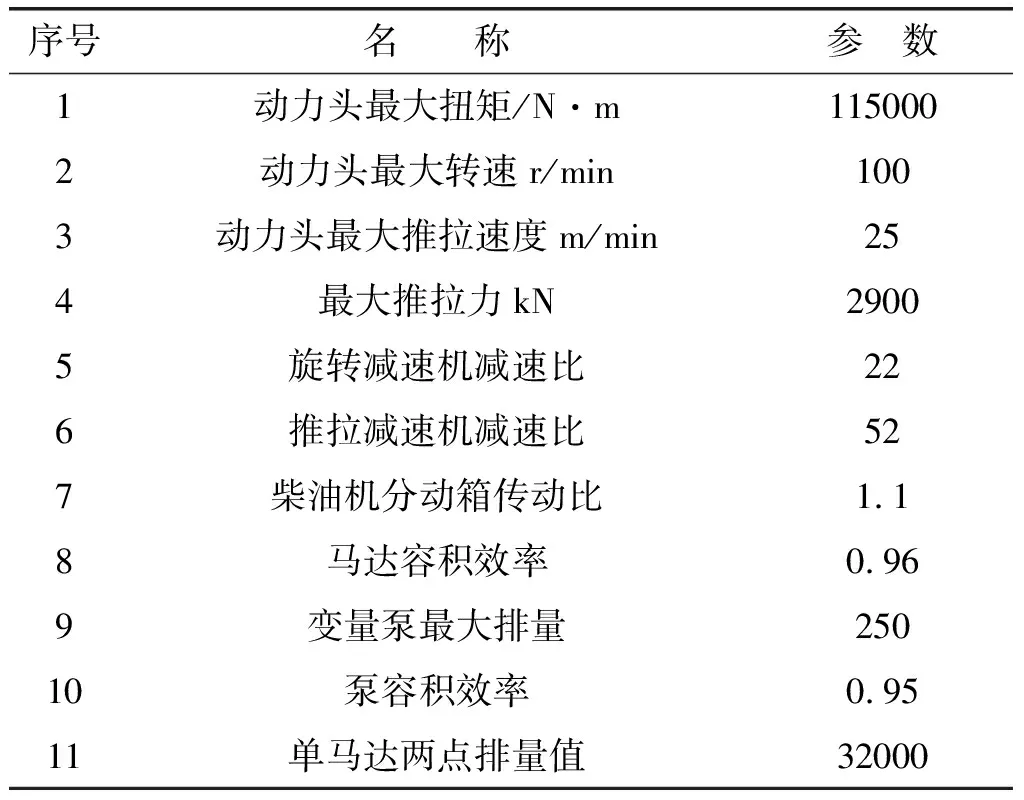
表1 实验定向钻机主要技术参数
在实验过程中,将钻杆旋转速度、最大回拖参数与最大回推力、最大输出扭矩4个参数作为主要的实验数据。
3.2 钻杆旋转速度分析
对比此次研究提出的定向钻机液压系统运动学参数标定技术与其他两种技术的钻杆旋转速度标定结果,如图1所示。
图1中,标定结果与实际值具有一定的差距,且差距较大。
3.3 最大回拖参数分析
此实验中,测定距离为2 m,测定回拖速度,三种方法的测定结果与实际值对比结果如图2所示。
图2中,在测定最大回拖参数上,所提出的标定技术也获得了效果较好的标定结果,与实际值相差较小。而其他两种方法与实际结果具有一定的差距,标定效果较差。
3.4 最大回推力分析
三种方法最大回推力参数标定结果如图3所示。
图3中,在测定的几个时间内,三种方法最大回推力参数标定结果与实际值相差都不是很大,在此部分标定中,应用效果较好。
3.5 最大输出扭矩分析
三种方法与实际的最大输出扭矩分析结果如图4所示。
图4中,在前几分钟测试上,所提出方法与其他两种方法最大输出扭矩的标定结果与实际值相差较小,随着时间的增多,其他两种方法测定误差逐渐增大,与实际值相差较大。
4 结束语
研究市政工程用定向钻机液压系统运动学参数标定技术,将参数标定细化为测量位形优选与倾斜角校准误差补偿两方面,构建定向钻机液压系统动力学模型和倾斜角校准误差模型,重点分析系统的动态特性,即以系统的静力荷载,作为载荷线性结构稳态响应情况,增加位形测量参数,结合谐响应过程的非线性特征与系统固有频率,估计状态向量最优值,获取运动学参数标定效果,有效提高了标定的准确性,在实际工程中有着较好的应用效果。
猜你喜欢
遗传(2022年9期)2022-10-10
汽车实用技术(2022年16期)2022-08-31
大电机技术(2022年3期)2022-08-06
商品与质量(2021年43期)2022-01-18
内燃机与配件(2022年2期)2022-01-17
铁道建筑技术(2021年4期)2021-07-21
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
电子制作(2019年15期)2019-08-27
冰雪运动(2016年5期)2016-04-16