
混合现实技术联合实时超声在腹腔镜下肾部分切除术治疗完全内生型肾肿瘤的临床应用
2022-09-06 02:18陈远哲常雪峰单卫民杜永强
现代泌尿外科杂志 2022年8期
陈远哲,常雪峰,李 明,单卫民,杜永强,管 波
(阜阳市人民医院泌尿外科,安徽阜阳 236000)
肾部分切除术(partial nephrectomy,PN)是目前治疗局限性肾癌的重要方式,其优势在于能更好地保留肾单位,提高患者后续生活质量,有观点认为对于局限性肾癌,若技术条件允许则均应采取PN[1]。随着科技的发展,腹腔镜手术效果完全媲美以往的开放手术,且其具有创伤小、恢复快等优势,在临床上的应用越来越普遍。但对于完全内生型肾肿瘤,若实行腹腔镜下肾部分切除术(laparoscopic partial nephre-ctomy,LPN)是对术者的技术水平和经验及医院的医疗设备条件等综合因素的严峻考验。所以完成此类复杂手术,保证手术的安全性和准确性的同时最大限度保留肾功能,是急需解决的难题。伴随术中超声的出现和混合现实(mixed reality,MR)技术的发展,阜阳市人民医院尝试开展此类复杂手术。我院于2020年1月-2021年12月共收治3例完全内生型肾肿瘤患者,均行LPN,手术顺利,效果满意,现报道如下。
1 资料与方法
1.1 一般资料回顾性分析阜阳市人民医院2020年1月-2021年12月行腹腔镜下肾部分切除术治疗的3例完全内生型肾肿瘤患者的临床资料。其中男性2例,女性1例;肿瘤位于左侧1例,右侧2例;患者平均年龄55(54~56)岁。平均肿瘤直径2.5(1.8~3.1)cm。术前血肌酐平均78.4(46.8~135.7)μmol/L。所有患者术前均行超声及双肾计算机断层扫描(computed tomography,CT)增强检查(图1)并诊断为完全内生型肾肿瘤。3例患者TNM分期均为T1aN0M0,RENAL评分为4~10分,平均7.3分。
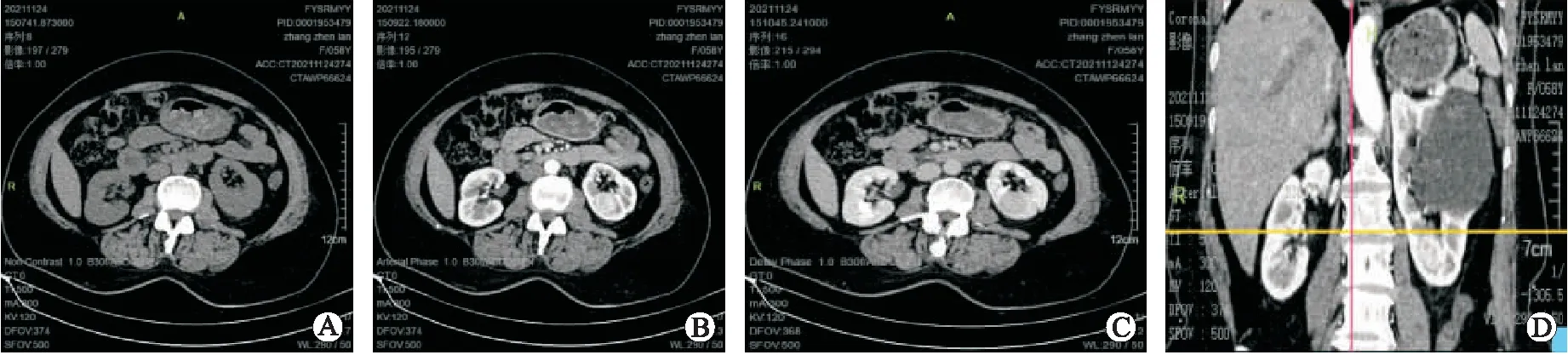
A:平扫时左肾未见明显肿物;B:增强扫描动脉期明显见到左肾肿物强化,边界清楚;C:增强扫描静脉期可见瘤体有“快出”的表现;D:冠状位显示肿瘤完全位于肾实质内。
1.2 混合现实技术重建采用紫薇帝星3D人体可视化阅图工作站软件、微软hololens 2代、MR混合现实应用系统及Ultra View超声(丹麦BK)进行混合现实技术重建。
患者术前均由我院同一位影像科医师行双肾CT增强检查,安徽紫薇帝星数字科技有限公司拷贝出影像数据,并安排同一位工程师制作出三维可视化图像(图2),同时将重新整理的数据图像导入至微软hololens 2代,从而实现MR技术。

A:占位组织与周围血管、淋巴结关系;B:占位组织与静脉血管关系;C:占位组织与动脉血管关系;D:占位组织与肾脏关系。棕色肿物为肾囊肿,黄色肿物为肿瘤,红色为动脉血管,蓝色为静脉血管。
1.3 手术方法患者全身麻醉,取健侧折刀卧位,腋后线肋缘下作一2 cm切口,分离至腹膜后腔。自制气囊扩张腹膜后腔。分别在腋前线、腋中线髂脊上置直径10 mm穿刺套管,放置腹腔镜。清理腹膜外脂肪,沿腰大肌打开Gerota筋膜,沿肾脏背侧在肾周脂肪囊外游离至膈顶,游离肾动脉备用,清除肾脏表面脂肪,未见明显肿瘤膨出。遂将重建的全息影像数据导入至微软hololens 2代,由术者佩戴微软hololens 2代,在术者的视野中可见到虚拟呈现的肾脏和肿瘤,术者可手控调整虚拟肾脏的大小,将其与腔镜系统里的肾脏按1∶1的比例进行重叠融合,从而准确定位肿瘤所在位置;同时将腹腔镜超声探头由套管置入腹腔内,在BK超声中寻及瘤体的位置、大小和深度,发现超声探头探查的瘤体位置与MR技术中呈现的瘤体位置一致,且与术前CT结果相同。术者使用超声刀在肾脏表面标记出瘤体在肾脏表面的投影,分离并阻断肾动脉,由于术前影像学考虑瘤体为恶性肿瘤,故在距离瘤体边缘0.5 cm处使用剪刀U型剪开肾实质,寻及肾实质肿瘤,吸引器辅助下沿肿瘤包膜完全剜除肿瘤。剜除后观察创面,疑似有集合系统损伤者,可用3-0倒刺线缝闭疑似创口。3-0倒刺线连续缝合内层创面,2-0倒刺线连续免打结缝合外层创面,闭合伤口。松开肾动脉阻断夹,观察创面无活动性出血,将切除的肿瘤置入标本袋,完整取出(图3)。

A:术者佩戴微软hololens 2代;B:视野中可见到虚拟呈现的肾脏和肿瘤;C:置入超声探头,探查肿瘤位置;D:虚拟影像和术中超声标记瘤体为同一位置。
1.4 术后随访方式术后告知患者定期随访,随访方案主要为电话沟通及门诊就诊2种。术后1个月需至门诊询问患者病情变化,复查肌酐了解肾功能变化,影像学复查选择B超或CT平扫。
1.5 统计学方法应用Microsoft Excel 2016对数据进行处理,计量资料采用平均数(范围)表示。
2 结 果
患者一般临床资料见表1。本组3例患者均行LPN,无中转开放,术中均准确定位内生型肾肿瘤的位置,并进行完整切除。平均手术时间205(160~270)min;平均阻断肾动脉时间26(18~30)min;术中平均出血110(80~150)mL,均未输血;平均术后住院时间7.3(6~9)d。术后病理诊断:乳头状肾细胞癌2例、嗜酸细胞腺瘤1例,手术切缘均为阴性。术后1个月复查血肌酐平均99.4(54.7~185.7)μmol/L。术后1例患者出现肌酐升高情况,该患者术前肌酐已偏高,伴肾功能不全,术后1年再次复查肌酐已降至153.7 μmol/L,基本接近术前水平。另外2例患者术前及术后肌酐无明显差异。术后随访1~13个月,平均7.7个月。所有患者均获得随访,术后病情良好,无肿瘤复发。

表1 3例完全内生型肿瘤患者的临床资料
3 讨 论
完全内生型肾肿瘤,顾名思义是指肾实质完全包裹了肿瘤组织,无法肉眼观察甚至无法触及到瘤体组织,通过影像学检查可探查出肾实质内有肿物。邱敏等[2]总结内生型肾肿瘤有以下几个特点:①肿瘤位置深,被肾实质所包裹,寻找困难;②由于肿瘤邻近肾窦或集合系统,部分肿瘤同时邻近肾血管,手术操作困难,风险高;③肿瘤的形状一般为椭球形,体积较小,一般在T1a期以内。本组患者的瘤体平均直径为2.5 cm,TNM分期均为T1a期,剜除的瘤体形状类圆形,体积均较小;术中切除瘤体时疑似有集合系统损伤,用3-0倒刺线缝闭疑似创口,说明瘤体邻近集合系统。
关于根治性肾切除术(radical nephrectomy,RN)和PN比较,目前普遍认为PN能更好地保留患者的肾功能[3],降低肾功能不全及相关心血管事件的发生风险[4],提高患者生活质量[5]。在本组纳入的患者中,例1术前已经出现肾功能不全,例3术后病理提示嗜酸细胞腺瘤为良性肿瘤,选择PN可谓是最佳方案。目前术前常采用RENAL评分系统评估手术的难度,从而选择是否能进行PN,本组的平均RENAL评分为7.3(4~10)分,可施行肾部分切除术。对术者来说,施行肾部分切除术的理想目标是达成三连胜,即完整切除肿瘤保证切缘阴性、最大程度减少肾脏损害以及避免术后并发症的发生,其中最重要的是要保证肿瘤的切缘阴性[6]。
LPN治疗完全内生型肾肿瘤对术者来说手术操作难度较大,学习曲线较长,因而如何更快、更准确定位肿瘤的位置是目前泌尿外科医生考虑的一大问题。2016年,邱敏等[2]报道了33例实时超声监测下行后腹腔镜下肾部分切除术治疗完全内生型肾肿瘤的研究,肾动脉阻断时间平均26 min,术后切缘均为阴性。而本研究中,患者术前影像学诊断均考虑为恶性肿瘤,因而均在瘤体包膜外5 mm处切除肿瘤,肾动脉阻断时间平均26 min,术后切缘均为阴性,与文献报道相似。然而术中超声不仅需要配备专门的腹腔超声设备,而且要求术者具备扎实的超声影像知识,但超声定位无法给予准确瘤体范围界定,为了避免瘤体残留,难免将切除的范围进行扩大,导致正常肾组织被切除,加重了肾功能的损害。同时单一的定位方式依旧无法保证手术的安全性。
近几年,众学者探讨研究各种内生型肾肿瘤的定位方法,以此降低术中操作难度,缩短学习曲线。孙圣坤等[7]应用软件重建数字肾模型,利用模型计算并记录肿瘤与肾脏各个边缘的距离,再将数据应用到术中,得到瘤体的大致位置。王江平等[8]采用3D打印制作出内生型肾癌的“洞口”肾脏模型,术中将肾脏模型拓片置入实体肾脏表面,留有的洞口即为肿瘤的位置,从而达到定位的效果。但这两种方案都依靠术者主观观察与判断,且数据或拓片需在模型与实物中转化,难免产生误差。武鹏等[9]报道了15例运用混合现实技术联合达芬奇机器人再结合术中超声辅助定位行完全内生型肾肿瘤切除术,明显降低了手术难度,展现出在肿瘤定位和手术安全性方面的优势。王亚楠等[10]报道了11例全息影像技术联合达芬奇机器人辅助系统精准定位和剜除内生型肾肿瘤,手术均顺利完成,无切缘阳性,安全有效。
随着科技的发展,混合现实技术给予了临床医生新的灵感。通过相关软件,技术人员可以将2D影像图像转化成3D的虚拟模型,同时在通过混合现实设备将3D虚拟模型与现实事物进行交叉融合。邢金春[11]等指出全息影像技术在外科手术的术前、术中能够发挥重要的辅助作用,利用全息影像浏览软件,通过头戴混合现实设备或达芬奇机器人手术系统,术者可以将3D虚拟模型和真实术野进行实时影像融合。但达芬奇机器人价格极其昂贵,无法常规开展,而目前混合现实智能眼镜已经普及。因而我们团队术前对患者行CT增强检查,技术人员将增强的影像数据制作出三维重建数据,并导入微软hololens 2代设备中,术中患者可头戴该智能眼镜,清晰地将虚拟模型与现实肾脏相重叠,达到准确定位肿瘤的目的。在整个治疗过程中,我们有如下体会:①术前行三维重建,较单纯的CT图像,可清晰直观地显示出瘤体的大小、位置、形态,以及供应血管情况和周围脏器组织的毗邻关系;且在全息影像技术下,操作者可360°旋转、自由缩放调节肾脏的大小;②术前辅助医患沟通:通过三维图像,在手机上就能将病情立体直观地展示给患者及其家属,更方便讲解患者的病情、手术方案及手术的复杂难度和风险,更容易得到他们的理解;③术中将虚拟影像投影至腹腔视野中,可清晰地辨认出病灶大小、位置及供应的血管分支,可迅速寻找并游离出阻断的肾动脉,减少了手术时间,在阻断动脉时,可阻断供应瘤体的动脉分支,最大程度减少了肾脏热缺血时间,更好地保护肾脏功能;④联合术中超声能更加确切定位隐藏在肾实质内的病灶,增加了术者实施手术的信心,果断地切开、剜除肿瘤,减少了肾动脉阻断时间,同时避免过度切除正常肾脏组织。本研究仍具有其局限性:①术者头戴微软hololens 2代,投影的图像会随着术者活动而改变,无法做到时刻与现实肾脏重叠融合;②目前研究的病例数量有限,需继续增加病例数,进一步证明该技术的有效性和安全性。
综上所述,科技的发展让微创更微创,让不可能变为可能,让复杂变得简单。混合现实技术联合实时超声治疗完全内生型肾肿瘤,为腹腔镜手术的成功增添了保障,可以完整切除瘤体,最大限度地保留肾单位,明显降低了手术难度。
猜你喜欢
解放军医学院学报(2022年5期)2022-08-01
文萃报·周五版(2022年21期)2022-06-02
医药与保健(2022年2期)2022-04-19
中华眼视光学与视觉科学杂志(2022年1期)2022-03-22
家庭科学·新健康(2022年2期)2022-03-07
中国科技纵横(2021年3期)2021-11-27
中国美容医学(2020年4期)2020-05-13
中国保健营养(2019年7期)2019-10-21
读写月报(语文教育版)(2019年12期)2019-09-10
语文教学与研究(综合天地)(2014年7期)2014-07-26
