
分布式电推进飞机气动-推进耦合特性地面试验
2022-09-07 01:56张星雨高正红雷涛闵志豪李伟林张晓斌
航空学报 2022年8期
张星雨,高正红,雷涛,闵志豪,李伟林,张晓斌
1. 西北工业大学 航空学院,西安 710072 2. 飞机电推进技术工业和信息化部重点实验室,西安 710072 3. 西北工业大学 自动化学院,西安 710072
随着社会经济和科技的发展,人们越来越重视环境保护, 对绿色航空的呼声越来越高, NASA 新一代(+3)亚声速客机性能目标和欧盟“Flightpath 2050”计划都对未来飞机的燃油消耗、尾气排放、噪声水平等提出了更高的要求。由于目前传统的燃油航空发动机在工作方式和效率等方面的限制,已经难以在推进效率与低碳排放等方面有所突破,而电能作为一种广泛使用的二次能源,其不产生污染物、噪声低、几乎不会对环境产生影响,已经成为目前在绿色航空研究中的备受关注的能源形式。
飞机电推进技术是指以电能作为能量主体的飞机推进系统,由于电机系统的尺寸无关特性,在飞机布局设计时,可根据设计需求使用分布式推进布局,从而实现气动、结构、推进的最佳融合,如通过边界层抽吸(Boundary Layer Ingestion, BLI)技术、环量控制技术、噪声遮蔽技术等实现气动、噪声、推进效率的全面提升。但同时,分布式电推进飞机在机翼或机身后体分布安装推进器,推进器对机翼或机身边界层会产生抽吸作用,使飞机的气动与推进特性产生强耦合。在气动方面,分布式动力能够起到增升减阻,提高飞机气动效率的效果此外,流经飞机的气流受到黏性作用会降低流动速度,在飞机后部形成低速尾流区,降低飞机的推进效率。而分布式动力飞机通过分布在机翼后缘的推进器喷流作用,可部分或完全填补了低速尾流区,从而提高全机的推进效率,节省燃油。
基于上述优点,各国都开启了分布式电推进飞机的研制热潮,比较著名的方案有美国NASA的X-57麦克斯韦试验飞机与德国Lilium Aviation 公司的Lilium Jet等。国内外学者对分布式电推进飞机关键技术进行了大量的研究。Wang等研究了分布式混合动力无人机动力系统的设计方法。Kerho和Kramer在NASA航空前沿研究(Leading Edge Aeronautics Research, LEARN)项目资助下,使用计算流体力学和风洞试验方法对小型分布式电推进飞行器的推进器对机翼气动性能的影响开展了研究。Pieper等在NASA小型企业技术转让(Small Business Technology Transfer, STTR)项目资助下研制了分布式电推进飞机的动态缩比技术验证机,并采用推力线方法确定了推进器的布置形式。
通过开展文献调研表明,分布式电推进飞机的气动和推进之间存在强烈的耦合影响,传统的基于工程经验的气动分析方法和飞机总体参数设计方法无法很好地满足分布式电推进飞机的设计需要,对分布式电推进飞机的动力系统布局设计与评估及气动-推进耦合特性的研究是目前研究工作的重点。同风洞试验相比,使用地面车载试验能够在节省大量的时间和经费的同时,较为简便地对飞机的气动性能开展评估,从而缩短迭代研发周期。如NASA采用如图1的混合电力综合系统测试平台(Hybrid-Electric Integrated Systems Testbed, HEIST)车载试验平台,对X-57麦克斯韦分布式电推进飞机的气动-推进耦合特性和动力系统能源需求特性开展了相关研究,其研究结果指出:通过使用分布式电推进技术,仅需使用相当于原机翼42%面积的机翼即可满足巡航状态升力需求,从而降低巡航状态阻力;而在起降阶段使用动力增升装置可提高飞机的最大升力系数,增大失速迎角;但动力增升装置也会导致较大的俯仰力矩增量。

图1 NASA HEIST 测试平台Fig.1 NASA HEIST testbed
由于本课题组设计的分布式电推进技术验证机动力布置方式与X-57不同,其气动-推进耦合特性亦与X-57的不同,因此,为探究本分布式电推进验证机动力系统及气动-推进耦合特性,特别是开展对后缘布置分布式涵道推进系统对升力与俯仰力矩影响的量化分析,并加快对本课题组设计的分布式电推进技术验证机的技术迭代过程,确立了本文的研究内容:以此验证机为研究对象,建立分布式电推进飞机气动-推进系统地面测试平台,并通过地面试验结合数值计算的方法,对分布式电推进飞机动力系统气动-推进耦合特性开展研究。
1 分布式电推进技术验证机总体设计参数与气动性能估算
课题组设计分布式电推进技术验证机的目的主要用于对分布式电推进技术开展探索验证。主要研究内容包括对气动-推进耦合效应、推力姿态控制技术、能源优化与管理技术及飞行安全性和可靠性等关键技术开展研究和飞行验证。
考虑制造成本、研究需求与设备布置,该验证机采用了双机身串列翼布局与模块化设计。机身长2 400 mm,前翼翼展长2 680 mm,主翼翼展长4 314 mm, 机翼使用NACA4415翼型,前机翼面积为0.804 m,后机翼面积为1.368 m。
理论上,验证机使用双机身串列翼布局形式可以获得较为优异的气动性能。对串列翼布局而言,流经飞机前机翼的气流对后机翼有下洗作用,可以有效降低后机翼的有效迎角。因此,在前机翼出现气流分离时,后机翼还未发生气流分离,能够推迟失速临界点,从而提高整机的最大升力系数,此外,还使得其具有失速自恢复能力:由于前机翼先发生失速,此时前机翼升力下降,后机翼升力仍在增加,前后机翼升力差距会产生低头力矩,从而能够避免失速情况的加剧,使飞机恢复正常飞行状态。
在动力装置的布置上,NASA的X-57分布式电推进飞机将动力装置布置在机翼前缘,通过螺旋桨滑流效应提高气动效率;本验证机与X-57不同,将动力装置布置于翼段后缘,通过偏转后缘实现矢量推力,以满足姿态控制与短距起降的需求,同时通过对机翼上表面边界层的抽吸,起到增升减阻的作用。全机共设有4组动力装置,每组布置6台电动涵道风扇(Electric Ducted Fan,EDF)推进装置,动力段分别布置于前机翼中翼段后缘及后机翼的左、中、右翼段后缘,全机共有24台 电动涵道,验证机总体布局如图2所示。

图2 分布式电推进技术验证机总体布局Fig.2 Configuration of DEP technology verification UAV
在总体设计阶段,为了获得验证机布局方案的气动性能参数,对该验证机的气动特性进行了数值模拟,获得了不同迎角下的升力系数、阻力系数和俯仰力矩系数。为提高计算效率,仅对省略掉机翼上涵道风扇和起落架的干净构型进行CFD计算和分析。该计算结果反映了飞机本体的气动特性,在进行气动-推进耦合特性分析时,作为基准参考并对试验结果进行验证。
计算状态选取巡航高度为海拔550 m,巡航速度为25 m/s,巡航状态的雷诺数=0.53×10(基于平均气动弦长)。力矩参考点取在前、后机翼之间,距离前机翼前缘0.868 m处。因飞机为对称布局,为节省计算资源,计算模型为半模,采用结构化网格对计算域进行离散,网格示意图如图3和图4所示。网格单元总数为715万。采用雷诺平均Navier-Stokes方程进行流场数值求解。通过有限体积法进行控制方程离散,湍流模型采用Spalart-Allmaras模型。

图3 CFD计算用网格(物面)Fig.3 Grid used for CFD computation (object surface)

图4 计算网格示意图(远场)Fig.4 Schematic diagram of computing grid (far-field)
图5、图6、图7分别为升力系数、阻力系数和升阻比随迎角(Angle of Attack, AOA)的变化曲线,图8给出的是俯仰力矩系数

图5 升力系数曲线Fig.5 Curve of CL
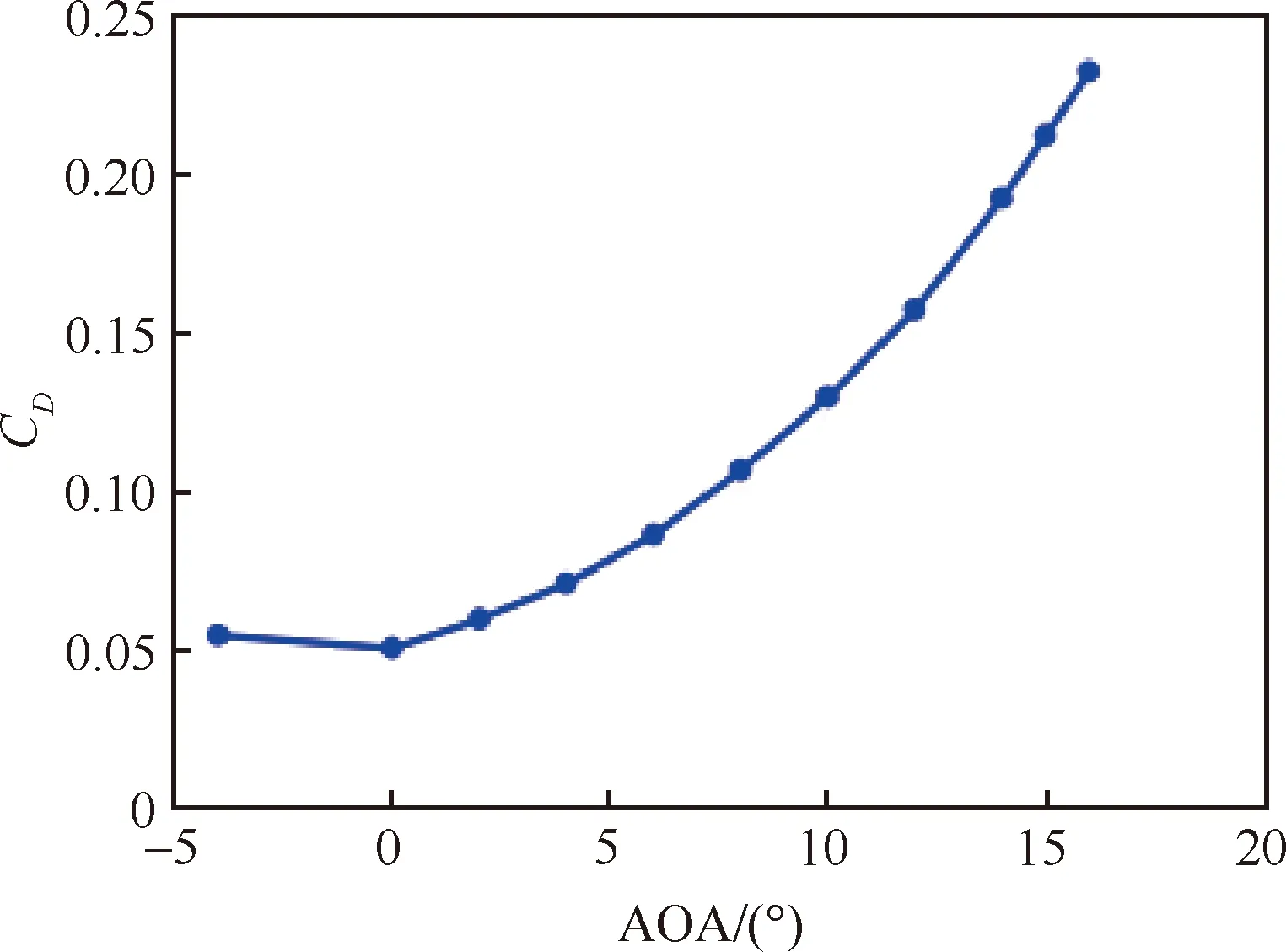
图6 阻力系数曲线Fig.6 Curve of CD

图7 升阻比曲线Fig.7 Curve of CL/CD

图8 俯仰力矩系数曲线Fig.8 Curve of Cm
随升力系数变化曲线,表1给出了主要气动特性参数。结合以上结果,可以看出:
1) 当迎角为3.5°左右时,本机能够达到最大升阻比9,此时的全机升力系数为0.62,由图8可以看出此迎角状态下纵向俯仰力矩基本为0,在此有利迎角巡航飞行时,所需升降舵面配平角度很小,所引起的配平阻力也很小。因此,试验中将3.5°作为本机的巡航迎角。由于动力系统为分散安装在机翼上方的电动涵道风扇,推力线不经过飞机的重心,且前机翼上的推进器数量少于后机翼上的,因此在实际飞行中,推进系统会对全机产生一定的低头力矩,需要偏转升降舵进行配平。由于采用了双机身布局形式,增大了飞机的浸润面积,带来了额外的摩擦阻力和干扰阻力,因此会使全机升阻比有所降低。
2) 当此无人机的重心位置取在前后机翼之间、距离前机翼前缘0.868 m处时,静稳定裕度为15.38%,通常,当中小型无人机的静稳定裕度在10%~20%之间时,无人机可具有较好的静稳定性和良好的操纵性,因此可以认为本机的操稳特性较为理想。

表1 主要气动特性参数Table 1 Main aerodynamic parameters
总体而言,该分布式电推进技术验证机具有较好的气动性能,失速特性较好,并且在最大升阻比状态时全机俯仰力矩系数接近0,不会产生额外的配平阻力。同时确定了后续试验中的重心位置与力矩参考点。
2 分布式电推进飞机气动-推进系统地面测试平台设计
由于推进器与机翼的气动性能耦合机理较为复杂,在总体设计开展计算评估时未考虑机翼上涵道风扇动力单元。因而在验证机完成制造后,为进一步对全机动力系统的动力特性、气动特性以及气动-推进耦合特性进行研究,并评估验证机在安装动力单元后,动力单元对气动特性的影响,设计并制造了分布式电推进飞机气动-推进系统地面测试平台,由动力系统能源特性地面测试平台与气动特性车载地面测试平台统组成。
2.1 动力系统能源特性地面测试平台
由于分布式电推进技术验证机的设计目标并不针对动力单元,为缩短研制周期,降低成本,没有自行设计推进系统的电动涵道风扇,而是在现有的成熟货架产品中根据设计需求开展产品选型。由于目前采用电动涵道的无人机较少,因此市面上面向专业无人机的产品非常少,货架产品多为针对航模娱乐飞行开发的低成本产品。由于其成本限制严格,做工一般较为粗糙,性能一致性较差,且存在不同程度的性能指标虚标现象。
因此,为验证电动涵道风扇的性能指标并评估其动力系统特性,设计了分布式电推进飞机动力系统能源特性地面测试平台。该平台由推力测量系统和动力能源参数测量系统组成。
同时,为评估由6台电动涵道所组成的分布式电推进动力段的动力系统能源特性参数,从而更好地评估能源系统需求,为分布式电推进飞机配电系统设计打好基础,本测试平台可扩展为多涵道动力段能源特性地面测试平台,可对由至多6台电动涵道所组成的动力系统开展动力系统能源特性测试。
供电系统负责为涵道电机提供电能,根据参与选型的涵道风扇的额定电压与功率需求,使用了一台15 kV·A(DC30 V/500 A)的可编程大功率稳压直流电源,可同时供应6台电压小于30 V、功率在1.5 kW以下的电动涵道所需电能。
推力测量系统将涵道以推力方向竖直向下安装于推力测试架上,使用力传感器对涵道—台架安装组合体的总质量进行测量,在不同推力条件下,将测量的安装组合体的总质量的变化量视为推力大小的测量值。
动力能源系统参数测量系统主要对涵道在锂电池电压波动范围(16.8~14.8 V)内,在不同推力大小下的干、支路电流进行测量。并将前述力传感器测量的安装组合体质量信号与各电流传感器输出的电流信号、电压信号接入信号调理箱,经过信号调理后使用每秒采样25×10次的基于NI PXI的实时信号采集系统,在LabView软件环境下进行数据采集。
2.2 气动特性车载地面测试平台
地面车载试验作为一种较为简便的工程测试方法,可以在飞机首飞前对飞机的升力特性、俯仰力矩特性及焦点的变化情况开展评估,确保首飞安全进行。
设计并制作了分布式电推进飞机气动特性车载地面测试平台,对验证机的升力、俯仰力矩、滚转力矩等力和力矩进行工程测量。测试平台安装在载车的顶部,如图9所示。测试平台结构使用铝型材和不锈钢制作,可根据试验飞机的构型对结构进行灵活调整,将验证机的起落架与测试架上的力传感器固连,从而将力通过杠杆传至测力传感器进行采集。

图9 DEP地面车载试验平台Fig.9 DEP ground based testbed
测量系统主要由测力传感器、变送器、电流传感器、信号采集卡和数据处理软件组成,如图10~图12所示。在安装后使用标准砝码对力传感器进行标定,校准后系统测量误差小于2%传感器满量程(Full Scale,FS)。

图10 数据采集系统Fig.10 Data acquisition system

图11 车顶测试架装配图Fig.11 Assembly diagram of vehicle mounting rack
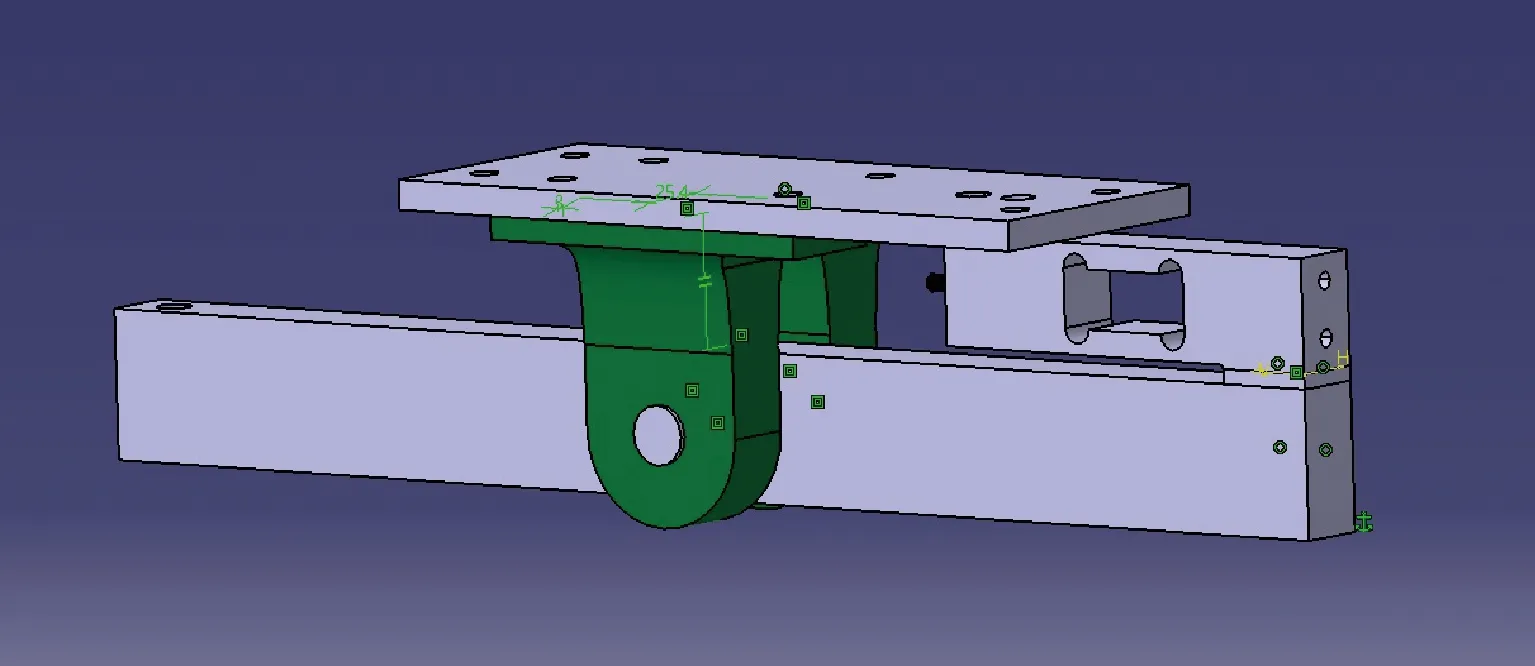
图12 测力传感器装配图Fig.12 Assembly diagram of force sensors
测试平台通过载车匀速行驶,模拟无人机在空中的飞行状态,并通过对无人机的质量进行连续测量,得到其重量的变化量,并对各传感器数据处理即可得到升力及俯仰、滚转力矩的大小(抬头为正,右滚转为正)。测量原理公式为
=+++
(1)
=+
(2)
=+
(3)

(4)

(5)
=Δ+Δ+Δ+Δ
(6)
=×Δ-(-)×Δ
(7)
=×Δ-(-)×Δ
(8)
式中:为飞机总重测量值;、、、分别为左前、右前、左后、右后传感器测量值;、、 W、分别为前侧、后侧、左侧、右侧传感器测量值之和;和分别为计算得到的重心在机身轴线方向与机翼展向的位置;为全机升力;为俯仰力矩;为滚转力矩;;分别为传感器左右间距与前后间距。
由于竖直方向安装的测力计无法测量无人机的阻力数据,若需测量阻力数据则需要加装六分量天平,限于试验条件所限,此试验中仅对升力和俯仰力矩数据进行测量和分析。
值得注意的是,使用这种方法开展气动评估需要考虑试验车辆与飞机之间存在的气动干扰,如前风挡引起的上洗气流影响如何消除,以及由于飞机刚性不足使得在利用起落架固定飞机时,飞机出现形变,产生内应力影响试验结果等问题。
为妥善解决这些问题,在车辆前部加装了隔板装置,如图13所示,通过测试与校准,可降低上洗气流对本地流场的影响至3°左右。同时为了提高机身刚度,在机身与测试架的连接处增加了刚性杆,提高了飞机的刚性,消除了内应力。

图13 对上洗气流遮蔽后的试验平台Fig.13 DEP ground based testbed with upwash screen
3 分布式电推进飞机气动-推进耦合特性地面测试结果分析
3.1 动力系统能源特性地面测试平台测试结果
首先,为了开展动力系统选型,比较不同规格动力系统的特性,对3款电动涵道风扇开展了动力系统选型台架试验,参数如表2所示。在台架试验中,对3款电动涵道风扇进行了台架推力测试,测量了其在不同工况下的电压、电流、转速、推力等参数,对其推力特性进行了详细的比较。
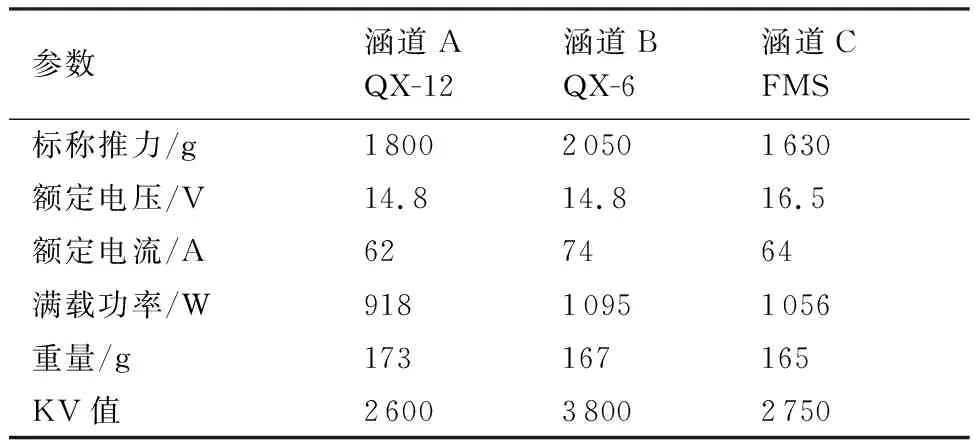
表2 备选电动涵道风扇产品参数Table 2 EDF parameters
根据图14~图16可以看出,QX-6电动涵道风扇由于在最大推力及效率方面落后于QX-12,不满足选型需求,FMS由于各方面性能与QX-12相近,但在大推力状态下效率较QX-12低,最大推力也较小,故最终选型结果为QX-12电动涵道风扇。

图14 EDF转速-推力特性曲线Fig.14 Curves of rotational speed to thrust

图15 EDF转速功率特性曲线Fig.15 Curves of rotational speed to power consumption

图16 EDF效率-功率特性曲线Fig.16 Curves of efficiency to power consumption
完成选型测试后,因为验证机使用锂电池供电,锂电池的输出电压会根据其荷电状态(State of Charge,SOC)及放电倍率不同,在16.8~14.8 V之间变化。为评估所选涵道风扇在锂电池供电状态下的全电压区间工作特性,使用动力系统地面测试平台开展了测试评估,结果如图17和图18所示。

图17 全电压区间推力与功率的关系图Fig.17 Throttle to power relation under Li-Po battery working voltage

图18 全电压区间力效与功率的关系Fig.18 Relation of efficiency to power under Li-Po battery working voltage
在电池工作电压(14.5~16.8 V)范围内,随电压变化,电动涵道风扇的功率及推力的变化基本呈线性,并且随工作电压增高,推力线斜率增大,但会伴随着力效降低。在稳定散热状态下,锂电池电压范围为14.8~16.8 V时,最大推力范围为1 150~ 1 475g,最大功率范围为668~1 035 W,力效范围为(1.71~1.42)g·W。在飞机锂电池满电状态下,水平方向最大推力可达到35.4 kg,在锂电池接近耗竭状态下,可提供27.6 kg的推力。虽然实测各项性能指标同标称性能存在差距,但仍可满足总体设计阶段提出的动力需求。
3.2 气动特性车载地面测试平台测试结果
在完成前述动力系统试验后,根据选型结果将选取的涵道风扇安装于试验验证机上,搭建了分布式电推进飞机气动特性车载地面测试平台,以期对动力系统所致的升力增量与气动-推进耦合关系开展初步探索。通过设计相应的车载试验,在不同速度(15,20,25) m/s,不同油门(0%,15%,20%,25%,30%,35%,45%),不同气流迎角(5°,9°,11°,16°,18°)下,对飞机的气动特性开展了试验评估。
试验时,试验人员驾驶试验车辆模拟无人机的飞行速度进行直线加速、匀速和减速行驶,模拟无人机在真实流场中的受力情况,获得了大量的试验数据。某车次的车载试验获得的部分数据如图19所示,可以看出,车载试验所获得的数据虽有误差和波动但是基本稳定在一定范围内,通过移动平均滤波处理可以得到该状态下的无人机气动力数据。

图19 某车次试验数据Fig.19 Data from one of ground tests
由于车身在试验中对流场产生了影响,在基准试验中,通过比较迎角传感器测量值与测试架与机身之间的几何角度,发现车身导致了10°~12°的气流上洗,影响了试验结果的准确。为尽量减少上洗气流的影响,在车辆前部架设了上洗气流遮蔽板,并且将飞机与车顶之间的孔洞做了遮蔽,将车身对来流迎角的影响降低至3°,并使用迎角传感器测量实际来流迎角而非飞机与测试架之间的几何夹角作为控制变量,从而测量在不同实际迎角下的升力与俯仰力矩。
图20和图21给出了经过移动平均滤波处理与采用实际迎角坐标后的在不同来流速度下,验证机的升力和力矩随推力的变化曲线。通过对试验数据进行分析,可以归纳得出:
1) 推进装置的增升效果明显,且全机气动特性和推进装置存在较强的耦合关系,且与来流速度相关,如图20所示。随着推进装置的功率增加,升力也在增加。以油门大小为变量:在15 m/s速度下,相比无动力时的升力,有动力时小迎角段升力由约66 N提升至约142 N,增幅115%,中等迎角段升力由约170 N提升至约240 N,增幅约38%,大迎角段升力也可提升32%~38%;在20 m/s速度下,相比无动力时,有动力时小迎角段升力由约122 N提升至约210 N,增幅72%,中等迎角段升力由约227 N提升至约328 N,增幅约47%,大迎角段升力也可提升15%~25%;在25 m/s速度下,相比25%动力时,中等迎角段升力由约330 N提升至约380 N,增幅约 15%;但在大迎角区间,增加不明显,其机理有待进一步研究。

图20 不同推力下的升力曲线Fig.22 Curves of lift to throttle

图21 不同推力下的力矩曲线Fig.21 Curves of pitch moment to throttle
总的来说,分布式电推进动力系统在一定程度上提升了机翼升力,特别是在低速小迎角情况下的增升效果较为明显,且其对机翼的边界层吸入可以有效减少气流分离,有利于失速特性并可减少一定的阻力,相较于集中式动力布局体现出了明显优势。
2) 对于本验证机而言,由于推进装置对升力影响较大,可从图21中可看出,随着推力增加,各速度与迎角下飞机俯仰力矩(抬头方向为正)出现了不同程度的降低,即出现低头力矩。同时与巡航迎角下的理论计算焦点位置在距前翼前缘818 mm处相比,在对试验数据进行处理后,在20 m/s速度时,实际焦点位置后移至1 169.14 mm处,而25 m/s 时,更后移至1 441.98 mm处。
推进装置产生低头俯仰力矩与气动焦点后移现象的原因是由于推进装置所诱导的非线性升力增量比较明显,且由于其后部动力单元与后机翼面积占比均比较大,在改变推力时,后翼面升力增加量较为明显,气动中心后移,最终影响飞机的稳定性。这种现象是常规布局飞机所不具备的,因此在设计分布式电推进飞机时,需要格外注意非线性升力增量对飞机稳定性的影响,以及分布式动力单元的布置形式对气动特性的影响,此外分布式电推进动力系统所引起的非线性升力增量也对飞控系统设计提出了更高的要求,并需要在后续的研究中开展对其内部机理的进一步研究。
4 结 论
1) 通过分布式电推进飞机气动-推进系统地面测试平台设计,建立了分布式电推进飞机动力系统能源特性地面测试平台与气动特性车载地面测试平台,并开展了一系列试验。
2) 完成了动力系统选型,选择了适合验证机的电动涵道推进装置,并对所选取的电动涵道在锂电池全工作电压下的效率与性能参数进行了实测,实测值与标称值存在差距,但仍满足设计需求。
3) 对分布式电推进技术验证机的气动特性与气动推进耦合特性开展了初步的、有益探索,验证了推力对升力的明显增加作用,在特定状态下升力较无动力状态可增加115%,在中、小迎角下至少有40%以上的提升;同时发现了焦点后移的现象,为下一步开展更精细的风洞试验与气动性能分析奠定了研究基础。
猜你喜欢
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
锦绣·下旬刊(2020年9期)2020-01-28
科学Fans(2019年4期)2019-04-30
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
山东青年(2016年12期)2017-03-02
少年科学(2014年7期)2014-08-18
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
