Buck型DC-DC变换器的滑模预测控制方法
2022-09-08 09:40高海燕
厦门理工学院学报 2022年3期
王 勇,高海燕
(厦门理工学院电气工程与自动化学院,福建 厦门361024)
Buck型变换器是DC-DC开关电源中最常用的电能转换器[1],广泛用于计算机、精密仪器、通讯设备、工业制造、航天航空等领域[2-3]。传统的Buck型变换器采取的控制策略大多为线性的PID控制,该方法简单、容易实现。误差积分反馈的引入,虽然提高了系统响应的准确性,但闭环响应迟钝,容易产生振荡,且存在鲁棒性差、无法适应Buck型变换器的非线性特点等。近年来,大量非线性控制器被应用于Buck型变换器,如模糊PID控制[4]、自适应控制[5]、预测控制[6]、滑模控制[7]等。

1 Buck型DC-DC变换器的数学模型
Buck型DC-DC变换器的电路工作原理如图1所示。
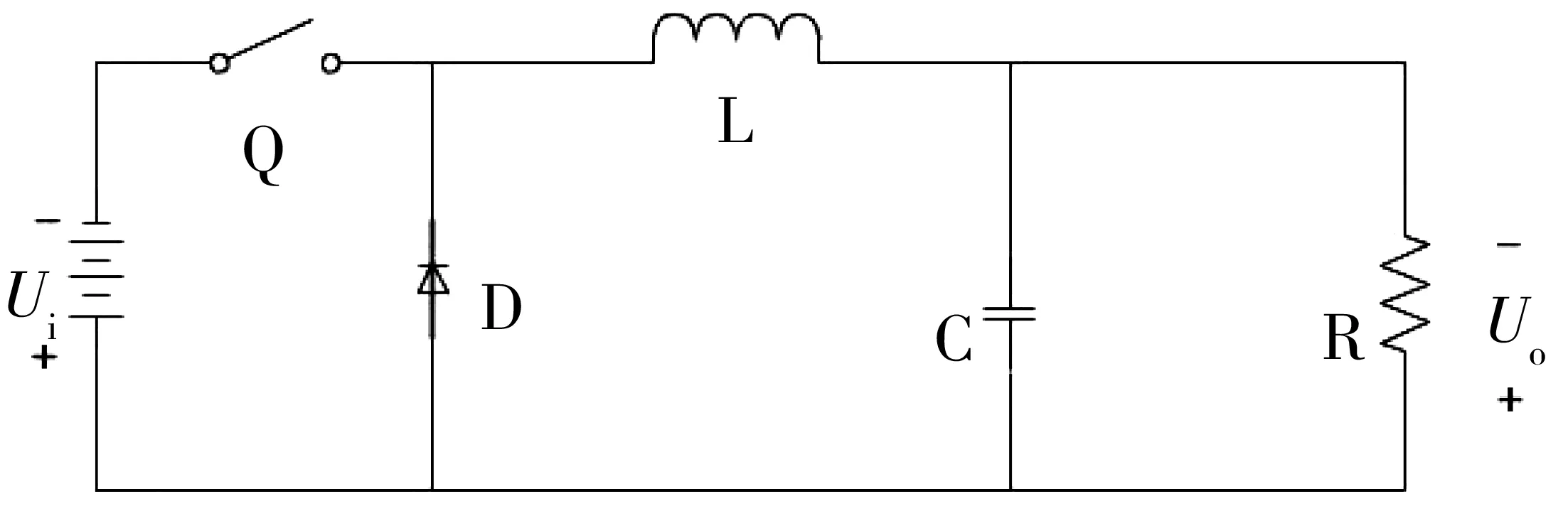
图1 Buck型变换器的电路工作原理Fig.1 Working principle of Buck converter circuit
Buck型DC-DC变换器有2种工作模式[15],分别为连续工作模式(continuous conduction mode,CCM)和非连续导通模式 (discontinuous conduction mode,DCM)。在开关Q导通时,根据基尔霍夫电压电流定律,得到如下关系:
(1)
式(1)中:Ui为Buck型变换器电路输入电压;L为电感值;iL为流过电感的电流;Uo为电路输出电压;C为电容值;R为电阻值。
当开关Q断开时,根据基尔霍夫电压电流定律,得到如下关系:
(2)
在1个周期内,将2种状态进行合并,得到如下关系:
(3)
式(3)中:D∈[0,1]为占空比;定义期望占空比Us=Uv/Ui(Uv为期望输出电压)。选取状态变量x1=iL,x2=Uo,控制量u=D,方程(3)转换为如下状态方程模型:
(4)
记为

(5)
本文的控制目标是设计控制律,使得系统的输出电压Uo跟踪给定参考输出电压值,下节将解决这一问题。
2 Buck型变换器的滑模预测控制器设计
2.1 建立滑模预测模型
将式(5)进行离散化,可得:
x(k+1)=Ax(k)+Bu(k) 。
(6)
设期望参考输出信号为xd(k),则跟踪误差信号为
e(k)=x(k)-xd(k)。
(7)


(8)

(9)
(10)

θ=[θ1θ2]=[θ2Kθ2]=θ2[KI]。
(11)
θ2的选取必须满足可逆的条件,滑模面可以由式(11)计算得到,因此得到滑模预测模型:

(12)
2.2 滑模预测控制器设计
定义无穷时域代价函数J∞(k):
(13)
式(13)中:W和M为加权矩阵。
由于式(13)涉及到无穷时域的滑模函数s(k+i|k)和控制量u(k+i|k),i=1,2,3,…,∞,求解将难以实现。为解决这一问题,需要经过一定的变换。
首先,定义二次函数:
V(e(k+i|k))=e(k+i|k)TPe(k+i|k)。
(14)
并且使其满足以下稳定性约束条件:
(15)
当控制系统稳定的情况下,s(∞|k)=0,u(∞|k)=0,将式(15)从i=0叠加到i=∞,可得到:
J∞≤V(e(k|k))≤γ。
(16)
式(16)中:γ>0为定义的无穷时域性能指标上界。这样,将求解无穷时域性能指标转化为求解γ的最小值,通过求解γ的最小值使J∞最小,令矩阵P=Q-1,将式(14)代入式(16)可得:
e(k|k)TPe(k|k)≤γ。
(17)
利用Schur补定理,可将式(17)写成如下矩阵形式:
(18)
e(k+1)=Ae(k)+Bu(k)。
(19)
假设控制率由状态反馈率和误差函数共同决定,即:
u(k+i|k)=F(k)e(k+i|k),i≥0。
(20)
将式(12)和式(20)代入式(15)中,得到:
e(k+i|k)T[(A+BF)TP(A+BF)-P+λTWλ+FTMF]e(k+i|k)≤0。
(21)
要使上式成立,只要:(A+BF)TP(A+BF)-P+λTWλ+FTMF≤0成立即可,令P=Q-1,Y=FQ代入,然后根据Schur补定理,可转化为如下线性矩阵不等式(linear matrix inequality,LMI):
(22)
考虑输入约束,同样可以根据Schur补定理转化为如下:
(23)
因此,将式(13)转化为如下LMI求解问题:
(24)
综上,Buck型变换器的滑模预测控制器设计过程归纳为:
1)根据给定参考信号和当前时刻系统状态得到跟踪误差,将系统(3)转化为离散形式的简约误差状态方程(9);
2)用极点配置法设计反馈增益K,选取可逆增益θ2,则简约误差系统的滑模增益为θ=θ2[KI],得到误差系统的滑模增益λ=θT;
3)求解式(24),得到最优解γ,X,Y,Q,状态反馈增益矩阵为F=YQ-1;
4)将计算得到的控制量D(k)=Fe(k)+Us,施加于系统(9),令k=k+1;
5)重复步骤3)和4)。
3 仿真验证
为验证本文方法的可行性,在MATLAB中分别以Buck电路状态空间模型(4)和SIMULINK中搭建的实际模型为仿真对象进行分析。从式(4)可以看出Buck型变换器是线性的,而SIMULINK中搭建的实际模型有电容、电感、电阻、MOS管等元器件,MOS管的开和断是非线性的,因此模型是非线性的。为验证本文算法的优越性,将基于幂次指数趋近率的控制算法[7]、滑模预测控制算法[14]、预测控制算法[16]和本文的算法进行对比仿真。仿真中系统参数取值如下:输入电压Ui=36 V,电阻R=10 Ω,电感L=0.75 mH,电容C=50 μF,期望输出Uv=20 V,离散的采样时间Ts=0.05 ms,初始状态x(0)=[0 0]T。
输出电压波形、滑模面波形仿真结果如图2所示。

图2 输出电压波形、滑模面波形仿真结果Fig.2 Simulation results of output voltage waveform and sliding mode surface waveform
从图2(a)可以看出,本文的滑模变量平滑,不存在抖动。从图2(b)可以看出,采用本文的方法,系统输出电压能够以更快的速度收敛于期望值,动态响应好,且无超调量。从图2(c)可以看出,本文的算法对于非线性模型也适用,且控制效果与线性模型类似,均能以更快的速度到达期望输出电压,到达期望输出电压的时间分别为:本文算法0.12 ms;文献[7]中所用滑模控制算法0.52 ms;文献[14]中所用算法0.15 ms;文献[16]中所用预测控制算法0.25 ms;调节时间更短,验证该算法的可行性。
为验证本文算法在负载突变时的鲁棒性,在0.01 s时,将系统的负载变为4 Ω,此时各算法电压突变波形和电流突出波形仿真结果如图3所示。
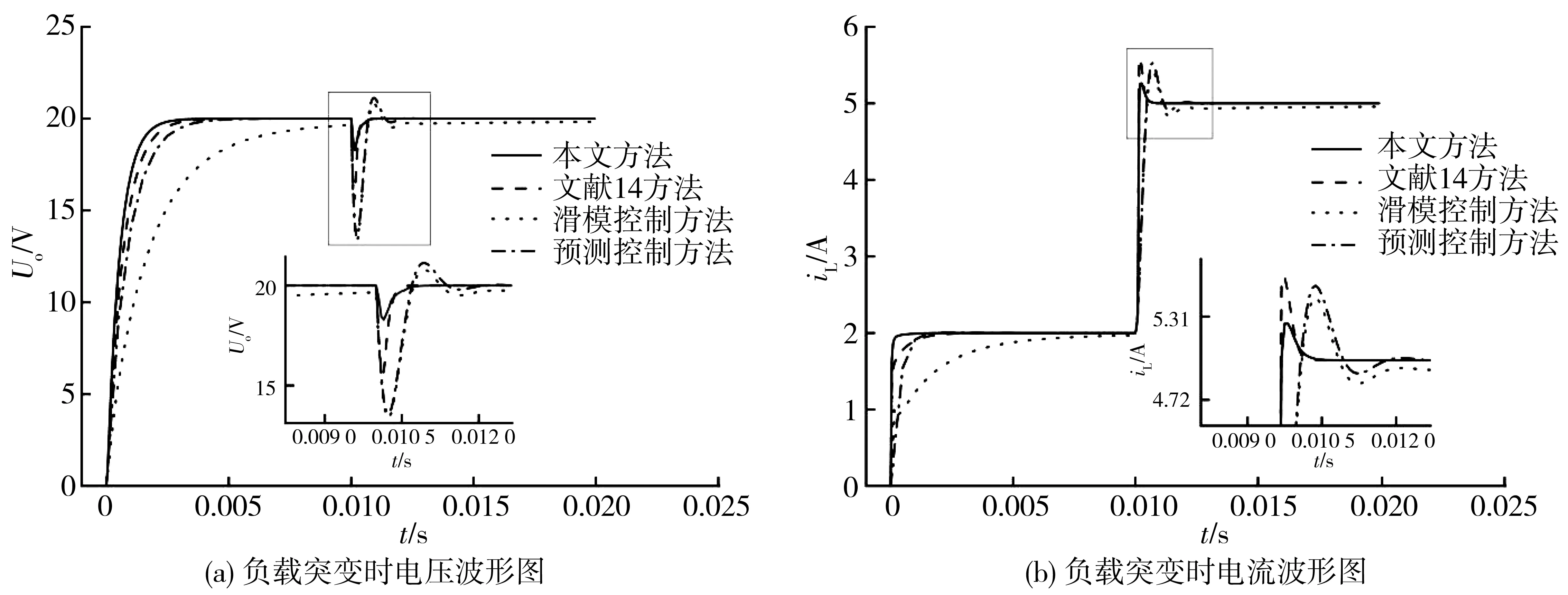
图3 负载突变时电压波形图和电流波形图Fig.3 Voltage waveform and current waveform in a sudden load change
从图3可以看出,系统在负载突变瞬间产生抖动,随后很快到达稳态值,且电压调节时间为0.43 ms,电流调节时间为0.11 ms,电压超调量为8.3%,电流超调量为3.2%,均小于其他方法,验证了本文方法在系统负载突变时的鲁棒性。
4 结论
本文研究DC-DC变换器的滑模预测控制方法,该方法首先将系统模型转化为误差状态方程,设计误差系统的滑模面,然后定义滑模面和控制量的加权求和为性能指标,最后通过Schur补引理,转化为优化问题。该方法将滑模控制与预测控制策略相结合,融合了滑模控制鲁棒性强和预测控制可以显式处理约束的优点,通过优化性能指标得到控制律,无需进行控制切换,因此,消除了滑模控制的抖振现象。仿真结果表明,相较于滑模控制、预测控制和已有的滑模预测控制方法,本文所设计的控制器调节速度分别提升76.9%、52.0%、20.0%,具有更快的调节速度;负载突变电压恢复到稳态的时间分别缩短0.40、0.13、0.03 ms,具有更强的鲁棒性,且完全消除了滑模控制的抖振现象。本文研究仅考虑简单的单相开关变换器电路,下一步考虑将本文算法推广到其他更复杂的三相Boost、Buck-boost等变换器电路中,并进行实际电路的样机实验。
猜你喜欢
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18
吉林大学学报(理学版)(2020年3期)2020-05-29
纺织科学研究(2020年1期)2020-05-21
农业机械学报(2020年2期)2020-03-09
三峡大学学报(自然科学版)(2019年5期)2019-10-17
中华建设(2019年7期)2019-08-27
沈阳师范大学学报(自然科学版)(2019年3期)2019-07-04
制造技术与机床(2017年6期)2018-01-19
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04