瓦里安Clinac IX直线加速器故障维修实例
2022-09-28 02:28蔡威郭良栋刘伟
中国医疗设备 2022年9期
蔡威,郭良栋,刘伟
宿迁市第一人民医院 设备管理处,江苏 宿迁 223800
引言
放射治疗目前已经成为肿瘤患者主要的治疗方式,主要依靠医用电子直线加速器实施治疗[1-2]。医用电子直线加速器通过产生具有一定能量的电子线或高能射线(如γ射线、X射线),经过动态多叶准直器适形后准确照射到肿瘤组织上,从而达到抑制肿瘤细胞生长,稳定患者病情的目的[3-4],它适用于全身多部位的肿瘤放射治疗,也可用于术前治疗或术后残留组织的放射治疗,还可与化疗联合进行治疗[5-6]。
瓦里安Clinac IX直线加速器作为一种放射治疗设备,其性能稳定、可靠性高,配置有6、15 MV两档X射线,4、6、9、12、16、20 MeV六档电子线,不仅能满足常规放射治疗需要,还可进行容积调强治疗、图像引导下放疗和三维适形放射治疗[7-8]。我院自2016年启用瓦里安Clinac IX直线加速器,随着使用时间增长,其故障发生率也越来越高,本文就该设备在使用过程中出现的3次故障维修进行分析总结,认供同行交流参考。
1 基本原理
瓦里安Clinac IX直线加速器主要是由加速管、速调管、电子枪、真空系统、束流输出系统、水冷系统、治疗床系统与自动控制系统等组成[9-10]。其基本工作原理为三相市电经升压、整流、滤波,产生12 kV直流高压输出到脉冲调制变压器,脉冲调制变压器将得到的直流高压转变为大功率直流高压供给速调管,使其产生2856 MHZ微波能量,经波导管传输到加速管内,在驻波加速管内建立起加速电场,同时另一路高压直流变压器产生的直流高压供给电子枪发射电子,在加速管内被加速电场加速,经聚焦、偏转形成高能电子束流,撞击金属靶产生高能X射线[11-13]。
由于从加速管输出的射束(X线和电子线)比较窄,其能量对称性和平坦度均不能满足临床治疗要求,需要用均整器或散射箔将射束均匀展开后形成剂量分布均匀的射束,再通过治疗头其他附件形成射野大小、形状合适的射束,才可用于患者治疗[14]。旋转均整盘(Carrousel)可实现将较窄射束均整形成剂量分布均匀射束的目的。
如图1所示,该型号加速器的Carrousel共安装10个不同的均整器,端口(PORT)1~10分别对应不同的能量。为了实现精准定位,Carrousel上安装有1个定位销和微动开关S9、5个位置检测开关(S1、S2、S4、S8、S16)和电位器R1[15-16]。定位销由压缩空气驱动,当Carrousel运动到设定位置时,定位销处于IN状态将Carrousel锁定并通过压合开关S9反馈定位销位置信号,保证Carrousel位置精确。同时S9的开闭状态也是Carrousel运动的始能信号,在Carrousel运动前先判读S9电平状态[17]。Carrousel边缘有 3个位置状态:凸起(Cam)、凹槽(Divot)和平(Neither),其中处于Cam和Divot位置时位置开关输出低电平,处于Neither位置时位置开关输出为高电平。在Carrousel边缘安装有5个位置检测开关,通过这5个位置检测开关的开闭状态形成高低电平,以此对Carrousel的10个位置进行精确编码。电位器R1的作用是在进行Carrousel位置校准时提供基准位置参考。Carrousel的运动主要由Stand机架右侧辅助电子柜内的Carrousel MODE & BMAG电路板控制,当选择某一档能量时,其会在电机驱动下旋转至相应位置。当Carrousel反馈给系统的位置与设置的位置不相符时,控制台计算机就会显示CARR和(或)FOIL联锁,同时BMAG电路板上显示对应的错误代码。CARR联锁代表Carrousel的位置与所选能量模式不匹配,控制台计算机和Carrousel控制器之间通信失败;FOIL联锁代表Carrousel未到达指定位置或者定位销位置不正确,通常情况下两个联锁同时出现,但也可能单独出现[18-19]。

图1 Carrousel结构简图
2 故障一
2.1 故障现象
直线加速器在开机进行系统晨检时,选择能量后出现CARR和FOIL联锁提示,重新切换其他能量模式时机器工作正常,但在正常使用一段时间后仍偶尔出现上述联锁,并且频次逐渐增加,最终停机检修。
2.2 故障分析与维修
通过对Carrousel结构的分析,当出现CARR、FOIL联锁时,其可能发生的原因有:① Carrousel电机驱动故障;② 定位销位置故障;③ 位置检测开关故障;④ BMAG控制板故障;⑤ 穿过旋转机架的电缆线故障等。
出现联锁后查看BMAG电路板LED显示故障代码为91,通过查看维修手册,该代码解释为:pin didn’t seat,表示Carrousel运动到设置位置后,定位销未能锁定,初步判断为定位销开关故障。拆下旋转机架上盖板,并将机架旋转至270°,同时需插入机架锁定销,否则当拆下铅块后会导致机架配重不平衡,将引起机架自转。拆下Carrousel上方铅块后可看到定位销和位置检测开关,此时切换能量,观察Carrousel运动正常,定位销运动正常并且S9开关闭合正常,此时测量开关为断开状态,表明开关故障需要更换S9开关,为了方便更换S9开关,建议将连接S9开关的信号线进行延长并使用热缩管进行绝缘处理。更换S9开关后将BMAG控制板S3旋至“F”位置执行Carrousel校准程序,发现校准失败,BMAG控制板上LED显示故障代码64,此代码解释为:bad CARR POSN 4,表示位置检测开关S4信号异常。查看Carrousel位置状态,发现Carrousel没有运动到位,定位销处于OUT位置,检查并调整S4凸轮开关,手动转动Carrousel观察位置检测开关可以正常开闭,分别检测S4开关在处于Cam和Divot位置时输出为0 V,处于Neither位置时输出为5 V,说明开关正常,切换能量并执行Carrousel校准,校准失败,BMAG控制板上LED仍然显示故障代码64。
通过查阅图纸,Carrousel位置检测开关的信号走向如图2所示,找到位置检测开关信号电缆接头P82与J82(在加速管中部位置),将接头断开,测量P82-4(S4信号输入端)电压为0 V,正常应为5 V,其余P82-1(S8)、P82-2(S1)、P82-3(S2)、P82-5(S16)电压均为 5 V。根据图纸分析,位置检测开关信号来源为Gantry Patch Panel上的J18,测量 J18-2(S4)电压为 0 V,J18-1(S1)、J18-3(S16)、J18-20(S2)、J18-21(S8)电压均为5 V,根据信号来源走向继续测量Gantry Patch Panel上的J2-4(S4)电压为0 V,J2-2(S1)、J2-3(S2)、J2-5(S8)、J2-6(S16)电压均为 5 V,最后测量Stand Aux Electronics Backplane上的J42-2(S1)、J42-3(S2)、J42-4(S4)、J42-5(S8)、J42-6(S16) 电 压均为5 V,说明连接Stand Aux Electronics Backplane(J42)和Gantry Patch Panel(J2)的线缆W32异常。经测量发现线缆内的4号信号线断路,该线缆穿过机架,因长期随机架转动而扭曲导致信号线断路。查阅图纸确认W32线缆有未使用信号线,因此对4号信号线做调线处理,将各线缆接头恢复正常后重新执行Carrousel校准程序,联锁消除,设备正常使用。

图2 Carrousel信号传输简图
3 故障二
3.1 故障现象
放疗技师在对OBI系统进行晨检过程中发现,OBI机械臂无法伸出,系统提示故障KV Source shoulder(elbow、wrist) axis is not calibrated,即KVS机械臂各关节位置未校正。
3.2 故障分析与维修
KVS机械臂位置校准数据不明原因丢失,导致电脑无法判断当前机械臂所在位置和控制机械臂运动。此时需要对KVS机械臂重新进行位置校准,打开Stand机架的左侧门,将BMC手控盒的线缆接在OBI Control Module Interconnect Panel上的X101接口,打开BMC手控盒开关,首先需使用BMC手控盒将KVS机械臂伸出,并将Shoulder轴调至 180°,Elbow 轴调至 90°,Wrist轴调至90°。在调节过程中发现KVS机械臂无法伸出,各轴只能做向机架内收缩的单一方向运动,为防止KVS机械臂过度收缩导致外壳无法拆卸而影响下一步维修工作,此时应立即停止调节机械臂,关闭BMC手控盒,由于各轴马达运动正常,初步判断故障应发生在运动控制部分。
OBI系统运动控制部分集中于运动控制架(Motion Control Node Rack,MCNR)内,KVS机械臂、KVD机械臂、MVD机械臂的运动各由一块马达驱动板(Motor Driving Board,MDB)和一块I/O板控制,MDB板的X14接口和I/O板的X4接口之间通过W107排线实现信号的交互,两块板共同插入MCNR Backplane对应插槽内。由于KVS机械臂、KVD机械臂、MVD机械臂运动结构相同,3个机械臂MDB板和I/O板均相同,可以使用交换法判断故障发生部位,注意交换前先关闭OBI系统电源。分别交换KVS和KVD的MDB板和I/O板后测试KVS和KVD运动状态,两次交换测试KVS机械臂后故障仍存在,但KVD机械臂运动正常,说明KVS机械臂的MDB板和I/O板均正常,根据维修经验判断,应是控制KVS机械臂运动方向的信号出现异常。仔细查阅MDB板和I/O板图纸资料,KVS机械臂I/O板X3接口的B28引脚为KVS Direction信号输入端,该信号具体走向如图3所示:BMC→OBI Control Module Interconnect Panel(X1015)→ OBI Control Module Interconnect Panel(X1005)→W112线缆→MCNR Backplane(Common-X1125) → MCNR Backplane(KVSX108B28)→KVS I/O PCB(X3B28)。BMC手控盒通过连接 OBI Control Module Interconnect Panel上 X101、X102、X103不同的接口,可以分别控制KVS、KVD、MVD机械臂的运动,在排除MDB板和I/O板故障测试中使用BMC手控盒控制KVD机械臂运动正常,可以排除BMC手控盒故障。因此,将故障锁定在W112线缆,通过测量发现该线缆5号信号线断路,应是由于机架旋转运动导致的信号线扭曲折断。通过查阅图纸确认W112线缆有备用信号线,对5号信号线进行调线处理后KVS机械臂可正常运动,重新执行KVS机械臂校准程序后,系统提示校准成功,故障排除。
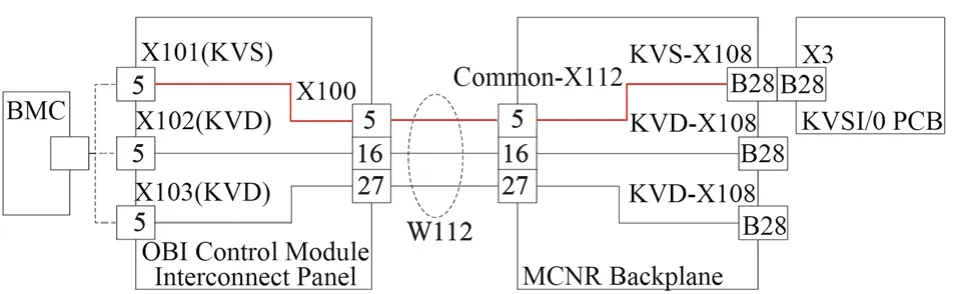
图3 KVS Direction信号传输简图
4 故障三
4.1 故障现象
治疗过程中偶尔提示HWFA联锁,进入维修模式后可屏蔽HWFA联锁,通过转动机架可消除联锁。
4.2 故障分析与维修
进入Event Logs,查看具体故障代码解释信息为:Primary/2nd cha misatch X1,即X1铅门位置读数验证比较错误。进入维修模式,手动控制X1铅门运动,发现PRO和SPRO读数正常且未发生跳变,两个电位器电压未发生明显的偏差,说明电位器阻值正常。通过旋转机架可消除连锁且当机架在90°和270°时HWFA联锁出现频次较高,因此怀疑为穿过机架的电缆线因长期旋转扭曲导致信号线接触不良。通过查看图纸确认,X1铅门电位器(R5、R8)输出信号走向如图4所示:Collimator Distribution Panel(J1612、7)→ Collimator Distribution Panel(J123、4)→ Collimator Patch Panel(J1416、17)→ W14a线缆→ Stand Aux Electronics Backplane(J3416、17)→ Stand Aux Electronics Backplane(J3217、23)→ W11线缆→Console Backplane(J2217、23)→Motor Interface PCB(P113、55)→Motor Interface PCB(J117、20)→CRADC PCB,其中W14a线缆即为穿过Gantry和Stand的线缆。通过旋转机架,当设备出现HWFA联锁时将该线缆两端断开,使用万用表分别测量W14a线缆的16和17引脚,发现两条信号线均正常,再将线缆两端插接好后发现故障消失,但仍无法排除线缆故障。查看图纸,发现该线缆预留有未使用的信号线,选取两条做调线处理,分别代替16号和17号信号线,将线缆安装好后继续观察设备使用情况。

图4 故障三信号传输简图
正常使用1 d后,加速器出现同样故障现象,说明W14a线缆正常,需继续排查其他故障。将机架和机头分别旋转至180°和0°,拆下机头外壳,此时发现机头随着外壳的旋转出现晃动,同时提示HWFA联锁故障,怀疑故障应与机头晃动有关。再一次仔细查看图纸,发现X1铅门电位器R5的参考电压CPRO-(-10 V)通过S1和S2开关后与R5连接,S1和S2开关位于机头旋转链条末端,用于检测链条张力,当机头链条松动,张力缺失,S1和S2开关断开,导致设备出现HWFA联锁。拆下机头左侧铅块,找到调节链条张力的螺母,调节链条张力使机头不再晃动,此时电脑显示HWFA联锁消除,确定故障与链条松动有关。设备运行过程中偶发的故障应是机头链条松动导致S1和S2开关接触不良,将铅块安装好后旋转机头和机架数圈未见故障,故障排除。
5 讨论与总结
医用电子直线加速器是一种结构复杂、技术含量高的大型医疗设备。设备系统越复杂,产生故障的频率也越高,随着设备使用时间的延长,出现故障的频率也会相应升高。我院瓦里安Clinac IX直线加速器之前出现过OBI系统故障,经过排查是由Supervisor故障造成的[20]。本文故障二是由于机架旋转运动导致W112线缆5号信号线断路造成的,故障现象相同但故障部件各异,故障的排除方式也要根据设备原理及物理结构进行具体分析,以快速确定故障点完成维修。此外医院设备维修人员需要了解设备各系统工作原理、熟悉设备结构,遇到设备故障时才能系统全面的分析问题,既要解决故障,又要避免在维修过程中影响设备精度[21]。故障三在调节链条张力螺母故障排除后,需要对机头旋转角度进行验证,必要时需重新校准以符合临床治疗要求。运动控制系统是直线加速器的重要组成部分[22],运动部件也更容易引发故障,本文故障一和故障二均是由于设备运动部位的长期旋转,导致线缆内部扭曲折断而引起的设备故障报错[23]。针对这类故障,通过查阅图纸资料可确定同一条线缆是否有悬空未使用的信号线,若有可通过调线的方法解决,既能节省维修时间,又能节约维修成本。同时运动系统也与治疗精度密切相关,日常维护保养、定期验证校准对于运动系统的正常运行具有重要作用[24-25]。
作为医院设备维修人员需要掌握一定维修技巧,充分利用厂家提供的图纸资料,在维修过程中及时归纳总结。由于图纸资料较复杂,必要时可将发生故障部位原理做成简化框图,便于维修人员在遇到类似故障时分析故障发生原因,易于尽快完成维修;同时详细了解故障发生前后设备的工作状态,利于判断故障情况。针对故障高发部位做好日常维护保养,备足易损配件,这样才能快速排除故障,为患者提供更好的服务。
猜你喜欢
机械设计与制造(2022年10期)2022-10-12
毛纺科技(2021年12期)2022-01-06
汽车电器(2021年12期)2021-12-30
现代仪器与医疗(2021年5期)2021-12-02
乐山师范学院学报(2021年12期)2021-02-25
家庭影院技术(2019年12期)2020-01-19
中国计算机报(2018年13期)2018-05-23
汽车维修与保养(2017年8期)2017-12-04
中国科技纵横(2014年24期)2014-12-11
钢管(2014年3期)2014-09-25