一种全方位多模式颈肌强度鉴定矫治仪设计
2022-09-28 02:28杨光艾莉邓略周林雪李双成徐东亮宗姝杨泽崔贺郑艳苹
中国医疗设备 2022年9期
杨光,艾莉,邓略,周林雪,李双成,徐东亮,宗姝,杨泽,崔贺,郑艳苹
1.长春奥普光电技术股份有限公司 研发中心,吉林 长春 130033;2.光电装备与先进制造技术吉林省重点实验室,吉林 长春 130033;3.中国人民解放军空军特色医学中心 研究室,北京 100142
引言
目前,高G载荷造成空军飞行员颈部损伤的问题尚未得到很好的解决,近年来关于飞行员颈部防护和颈椎稳固性等问题受到了人们高度关注[1-4]。针对肌肉损伤,康复训练被认为是最有效的方法[5-6]。因此,研制一种能最大限度地锻炼颈部肌肉,提高头颈部快速响应能力及增强颈部肌肉力量的装备对颈椎病的前期预防与恢复具有重要的意义[7-8]。大量研究表明,提高颈肌强度可作为预防高性能战斗机飞行员颈部损伤较好的方法[9-10],且目前主要治疗方法有牵引和颈肌增强2种[11]。所用的训练设备包括液压阻力计、4通道颈部训练器(屈、伸、左和右侧屈)、等张(砝码提供阻力的)颈肌训练器和等长模式的颈肌测力计[12-13]。然而,单独的等长训练不能提供颈部关节全活动范围的训练,单独的等张训练不能保证超负荷时颈部不受损,即无法保证安全性[14-15]。以上传统设备存在功能单一,只能进行单模式、单方位训练的缺点,且全套的颈部训练时间较长,单调的运动过程让训练者难以坚持完成全套的颈部训练[16]。
本研究旨在通过旋转座椅及摇摆矫治机构的组合,配以信号检测系统及数据处理系统以提供一种能系统、安全、有效地进行颈部肌肉锻炼,并增强肌肉、韧带力量的颈肌训练设备;同时在安全状态下对颈肌强度进行精确地测量,训练过程中能够实现实时数据采集、训练过程语音提示、听觉反馈、视觉反馈功能和数据存储、报告生成等功能,以期实现不同角度下全方位(前屈后伸0°~45°和左右侧屈0°~45°)和多模式(等张及等长模式)的训练。
1 设备设计
1.1 总体设计方案
全方位多模式颈肌强度鉴定矫治仪由机械系统、信号检测系统及数据处理系统等组成,其基本功能是实现对训练者进行坐姿下的颈部前屈后伸、左右侧屈多方位和各个角度下的等张和等长2种模式的力量训练。采用IC卡刷卡机进行数据读取与储存,训练完毕后在主控计算机上刷卡进行信息管理,并具备数据库的增加、修改、查找、删除和统计功能,同时提供打印功能。训练器材整体结构稳定、安全、可靠。
1.2 设备组成
全方位多模式颈肌强度鉴定矫治仪由机械结构模块、智能显示仪表模块、信息管理系统模块构成。如图1所示,机械结构模块具备进行颈部前屈后伸、左右侧屈全方位的训练功能。主要由主体框架、高度可调可转动座椅、摇摆矫治机构,智能显示仪表和肩部固定装置组成。智能显示仪表模块操作屏幕为触屏,屏幕尺寸≥17.78 cm。具备显示姓名、年龄、性别、身高、体重、体质指数、训练模式、训练负荷、训练次数、消耗能量、训练行程等信息的功能。信息管理模块具备数据库的增加、修改、查找、删除和统计功能,统计功能包括按照周、月、年方式统计训练强度、训练量,图表式训练报告等内容,并提供上述内容的打印功能。

图1 设备实物图
1.3 工作原理
为满足智能显示仪表模块的功能要求,设备通过IC卡刷卡机进行人员信息采集和数据的存储,在等长模式下采用角位移传感器、扭矩传感器进行信号采集,通过一体机进行语音提示和视觉反馈;在等张模式下选择配重质量,通过角位移传感器、扭矩传感器进行信号采集,一体机进行语音提示和视觉反馈。
2 机械结构设计
颈肌强度鉴定矫治仪采用纯机械系统实现颈部前屈后伸0°~45°、左右侧屈0°~45°、不同角度下等长和等张2种模式的训练。等长训练模式可满足运动范围内的不同角度进行等长训练,并且具有5档调节精度(0°、±15°、±30°、±45°、±60°);等张训练模式采用封闭牵引式配重砝码,总配重80 kg,最小配重5 kg,调节间隔2.5 kg。2种模式均可满足不同角度训练起始位置可调,调节精度10°,颈肌强度鉴定矫治仪工作原理如图2所示。

图2 工作原理图
2.1 主体框架
颈肌强度鉴定矫治仪主体框架如图3a所示,主体框架采用160 mm×60 mm×4.5 mm的型材矩管焊接而成,材质为Q235。对主体框架的受力情况进行仿真分析,结果如图3b~c,最大变形量为0.12 mm,局部最大应力为7.14 MPa,远低于材料的屈服强度235.00 MPa。由此可得出结论,主体框架的强度和刚度均满足使用要求,稳定性极高。

图3 主体框架结构及分析图
2.2 配重牵引传动机构
配重牵引传动机构如图4所示,主要由配重块、导向杆、导向杆固定架、导向滑轮、凸轮及牵引钢丝绳组成;训练过程中,颈部发力使头环与力臂带动凸轮转动,带动钢丝将配重块拉起,配重块提升过程中利用导向杆进行导向并使用多个导向滑轮实现钢丝绳换向。
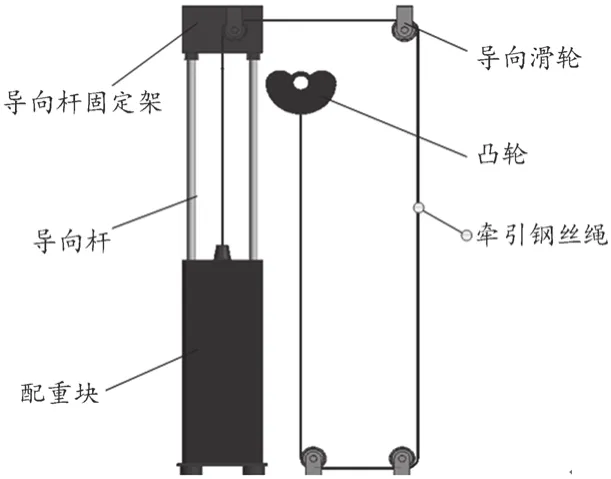
图4 配重牵引传动机构图
2.3 摇摆矫治机构
摇摆矫治机构是将头部作用力传递给扭矩传感器的机构,如图5所示,主要由头环、扭矩传递机构、力臂、调节盘、角度传感器和转轴组成。在训练过程中,通过脱开/锁定调节盘即可实现等张和等长模式的训练转换。将调节盘锁定,转轴固定,实现颈肌前屈后伸的等长模式训练;将调节盘锁定脱开,头环与力臂带动转轴和凸轮转动,牵引配重块上下运动,实现颈肌前屈后伸的等张模式训练。
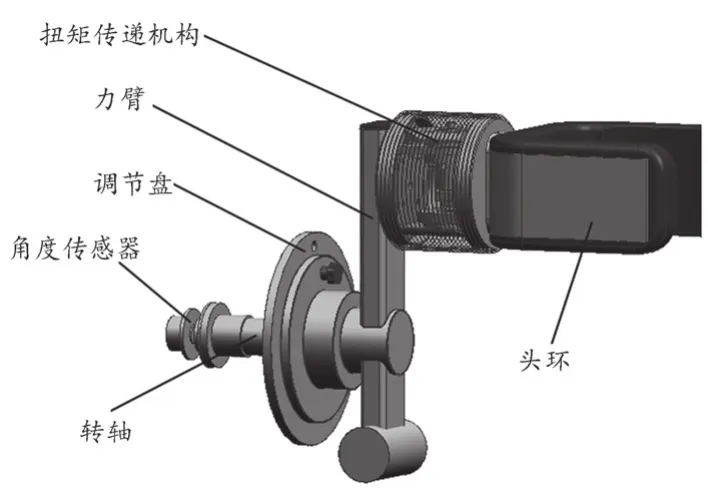
图5 摇摆矫治机构图
扭矩传递机构如图6a所示,绕第7颈椎椎体屈伸运动的切向力通过头环、右工型力杠杆传递给扭矩传感器,即右工型力杠杆绕转轴(与扭矩传感器同轴心)转动,其下方卡槽与扭矩传感器相适配,将力矩传递给扭矩传感器,检测颈部相应肌群肌力的大小。如图6b~c所示,对其进行分析,工型力杠杆的最大变形为0.56 mm,局部最大应力为186.05 MPa,远小于此件材料的屈服强度355.00 MPa,即此件的强度和刚度均满足使用要求。此外角度传感器与转轴相连,当力臂带动转轴旋转时,角度传感器即可测量颈部屈伸的角度;同时调节盘有定位孔,旋转力臂利用弹簧插销固定,可实现不同角度训练起始位置可调,调节精度10°。
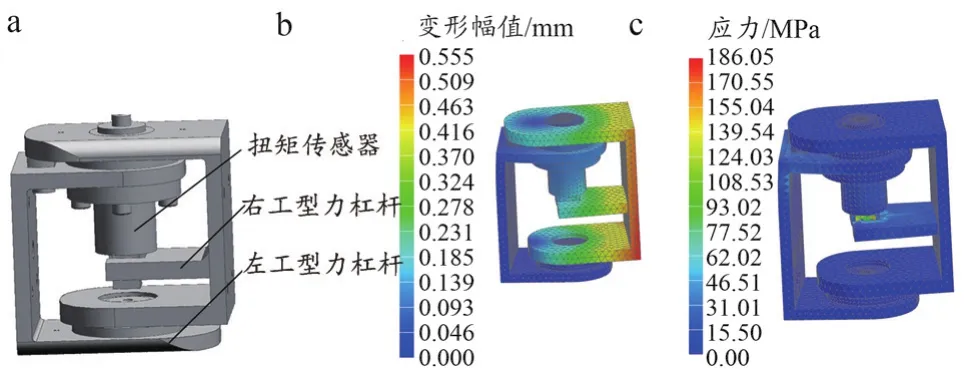
图6 力矩传递机构应力分析
2.4 肩部固定装置
如图7所示,肩部固定装置主要由水平导轨、固定臂、棘齿条升降机构和垂直导轨组成,其作用是在训练过程中为了防止训练者身体前后左右侧倾。肩部固定采用棘齿条机构实现垂直升降,水平方向依靠平行导轨进行宽度调节,并用插销锁紧实现肩部固定。

图7 肩部固定装置结构图
2.5 升降转动座椅
升降转动座椅如图8a所示,座椅由升降机构和转动机构组成,对座椅组件的稳定性进行分析,座椅固定后垂直上方加载2倍人体质量载荷200 kg,即2000 N的力进行分析,结果如图8b~c所示,座椅组件最大变形量为0.62 mm,局部最大应力为84.52 MPa,远远低于材料的屈服强度235.00 MPa,表明结构并不会被破坏,满足使用要求。
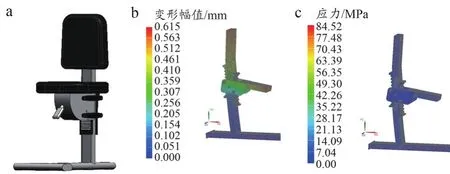
图8 升降座椅应力分析
2.6 智能显示仪表
如图9所示,智能显示仪表配有刷卡机来读取当前训练者的信息。智能显示仪表利用壁挂气压式伸缩万向旋转支架固定在主体框架上,可实现智能仪表的伸缩、升降、俯仰角度的任意悬停,使智能显示仪表可以保持在训练者前方,方便训练者了解训练情况。

图9 智能显示仪表装置机构图
3 电子学设计
3.1 电控设计
控制系统原理如图10所示,颈肌一体机采集扭矩传感器上传的数据,可通过计算得到训练出力;采集角位移传感器的数据,通过计算可得到训练距离,最后计算得到训练过程中消耗的能量。设备通过IC卡刷卡机进行人员信息采集和数据的存储,在等长模式下采用角位移传感器、扭矩传感器进行信号采集,通过一体机进行语音提示和视觉反馈。在等张模式下选择配重质量,通过角位移传感器、扭矩传感器进行信号采集,一体机进行语音提示和视觉反馈。

图10 控制系统原理图
3.2 测量原理
在医疗康复领域中[17],经常需要测量倾斜状态下的受力大小,在颈部训练中,在受试者的颈部运动到不同角度时,会要求实时反馈训练负荷的大小。倾斜测力原理如图11所示,在杆2终端添加角度传感器,可测量附加在杆终端任一角度的力N,扭矩传感器测量值T,预先测得杆1自身质心位置为L1/2。α为力N与杆之间的角度,α为已知测量值,m1为杆1的质量,m1作用在转轴上的力矩计算方式如式(1)所示,N作用在转轴上的力矩如式(2)所示,测得角位移传感器测量的角度值和扭矩传感器测量的力矩值T如公式(3)所示,并经过公式换算后实时显示任意角度值α的力值N如公式(4)所示,通过测量系统可实时测量受试者颈部在不同角度时对测量系统所施加的力,实时反馈训练负荷的大小。

图11 倾斜力测量原理图

3.3 操控软件
颈肌训练仪智能显示系统是安装在颈肌训练仪上面的可视化显示系统,在训练人员训练过程中显示其训练数据并进行相应的指导训练。训练机端软件主界面如图12所示,该软件界面包括基本信息功能区、训练设置功能区、训练信息功能区和待导出训练信息功能区这四大功能区。

图12 训练机端软件主界面
3.4 信息管理软件
信息管理系统可对训练数据库进行增加、修改、查找、删除和统计功能,并提供打印功能。管理界面中输入姓名、模式、时间等信息可以检索训练人员在一定条件下的训练结果并生成相应训练曲线,可以对相关记录进行删除,统计等操作。生成曲线后可以生成训练报告如图13所示。

图13 信息管理界面
4 使用方法
进行前屈后伸训练时,训练者坐在升降座椅后,将头部置于头环中,再将肩部固定装置的固定臂调节到适合的位置,将身体固定在座椅上,确保训练者身体不会前后倾斜,然后摆动头部,按照训练模式的要求进行颈部前屈后伸训练。如图14所示,旋转座椅底部转盘,调整座椅的方向,即可实现颈部左右侧屈的训练。进行左右侧屈训练时,训练者坐在升降座椅后,将头部置于头环之中,再将肩部固定装置的固定臂调节到适合的位置,确保训练者身体不会左右倾斜,然后摆动头部,按照训练模式的要求进行左右侧屈训练如图15所示。训练时根据需要选择等长/等张训练模式,其中进行等张训练时,需根据等张模式下测得的鉴定值和个人身体情况增减配重负荷。

图14 前屈后伸训练

图15 左右侧屈训练
5 训练结果
选取10名健康志愿者作为被试者,年龄28~50岁,体重55~83 kg,进行了实际的颈肌前屈后伸和左右侧屈训练。首先记录了训练前的初始值,经过2周的训练后,记录训练后的训练值,详细参数如表1~2所示,分析实际训练数据可知,通过颈肌前屈后伸和左右侧屈训练可起到锻炼颈部肌肉的作用,能明显提高颈部肌肉力量值,有效预防颈椎病的发生。应用该颈肌强度矫治仪进行2周颈肌强度训练,颈肌相对强度增长率相当于瑞典Karolindka研究所飞行员颈肌训练12周的效果[18],见表3。
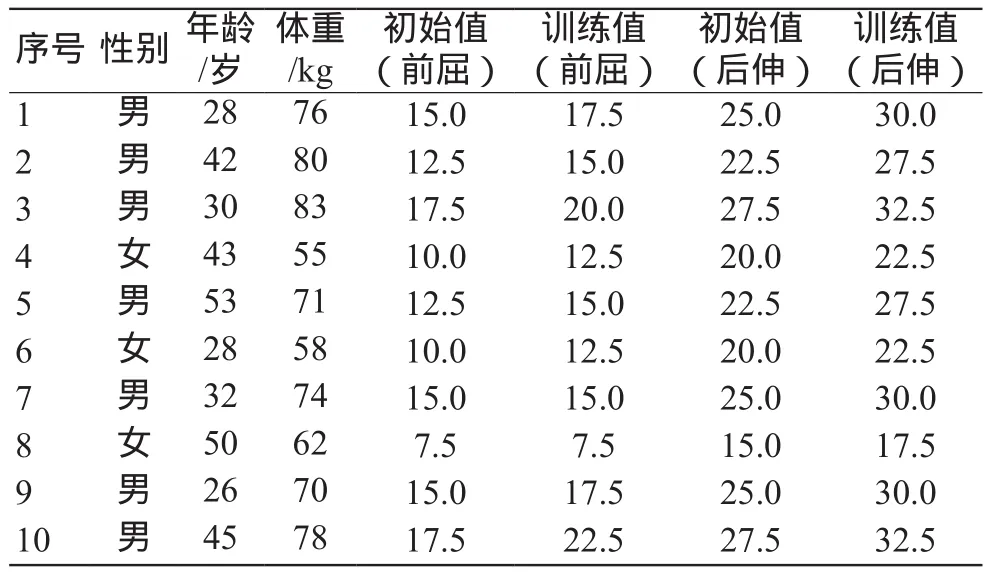
表1 颈部前屈后伸初始/训练值对比
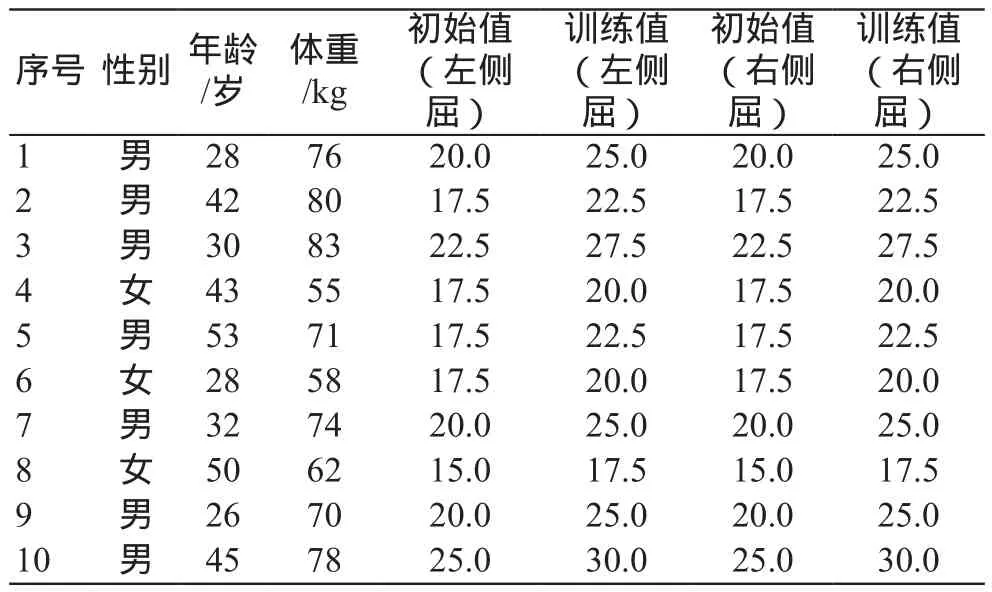
表2 颈部左右侧屈初始/训练值对比

表3 颈肌强度训练增长率与相关研究对照表(%)
6 讨论
目前针对颈部肌肉治疗方法主要是通过牵引及颈肌增强。相比于液压阻力计和4通道颈部训练器,该设备创新点在于采用旋转座椅及摇摆矫治机构组合的方法,可以在前屈后伸、左右侧屈(0°~45°)各方位下进行颈肌训练,运动方式更加灵活。此外,国内外先前所用的等张颈肌训练器[19]和我国空军所用的等长模式的颈肌测力计[20-22]功能单一,训练枯燥,只能进行单模式、单方位训练。该设备创新点在于可以在多个角度下(0°、±15°、±30°、±45°、±60°)进行等张及等长模式颈肌训练,提供颈部关节全活动范围的训练。同时,该设备采用了角位移传感器和扭矩传感器进行信号采集,可以对颈肌强度进行精确的测量。训练过程中能够实现实时数据采集、训练过程语音提示、听觉反馈、视觉反馈、数据存储和报告生成。但本研究还存在以下不足:头环组件设计尚需改善,下一步将结合人体工程学对设备进行进一步完善,给予训练者更好地用户体验。
7 结论
本文研制了一种全方位多模式颈肌强度矫治仪,该仪器整体结构稳定、安全可靠、智能化程度高,可实现颈肌强度的鉴定矫治功能,对提高头颈部的快速反应能力、增强颈部肌肉力量和颈椎病的前期预防与恢复具有重要的作用,在医疗设备市场具有很好地发展前景。
猜你喜欢
中老年保健(2022年5期)2022-08-24
中老年保健(2022年6期)2022-08-19
汽车实用技术(2022年2期)2022-02-21
云南医药(2021年3期)2021-07-21
汽车维修与保养(2021年8期)2021-02-16
商品与质量(2020年41期)2020-11-09
商品与质量(2019年20期)2019-09-27
北京汽车(2018年5期)2018-11-07
黄河黄土黄种人(2018年4期)2018-05-25
故事作文·低年级(2016年7期)2016-05-14