
基于社会力的交织区突发瓶颈段协同换道决策模型
2022-10-13 07:21秦雅琴钱正富谢济铭刘兵赵荣达王玥然黄磊
华南理工大学学报(自然科学版) 2022年7期
秦雅琴 钱正富 谢济铭† 刘兵 赵荣达 王玥然 黄磊
基于社会力的交织区突发瓶颈段协同换道决策模型
秦雅琴1钱正富1谢济铭1†刘兵2赵荣达2王玥然3黄磊3
(1. 昆明理工大学 交通工程学院,云南 昆明 650500;2. 云南省交通投资建设集团有限公司,云南 昆明 650103; 3. 云南省交通科学研究院有限公司,云南 昆明 650011)
为描述交织区突发瓶颈段车辆换道决策机理,提供一种突发事件环境可采用的换道决策模型,本文基于车辆微观轨迹信息与社会力行人交通流模型,构建面向瓶颈路段的车辆协同换道决策模型,可为智能网联突发瓶颈环境提供一种换道决策方法。首先,基于突发瓶颈段车辆换道决策特征,考虑车辆类型和驾驶员类型,构建车辆等效质量模型以改进社会力模型,在此基础上,将驱使车辆换道的因素描述为自驱动力、车辆间排斥力和障碍物排斥力,构建协同换道决策模型;然后,筛选了832个有效的换道决策微观轨迹数据,并分为标定集和验证集,以加速度为指标,曼哈顿距离为目标函数,利用遗传算法对模型进行标定,基于模拟数据和实测数据验证了标定方法的有效性;最后,与主动换道决策模型在换道方向识别、换道意愿强度、模型预测误差方面进行对比验证。结果表明,本文模型换道方向识别成功率达92.6%,输出的换道意愿强度与实测数据基本吻合,预测结果的均方根百分比偏差(RMSPE)值平均降低0.825,相对误差(RE)值平均降低1.379,显著优于主动换道决策模型。研究成果可为智能网联环境瓶颈段车辆换道意图识别、突发事件下的交通管理和控制提供理论依据。
交织区;突发事件;换道决策;社会力;遗传算法;微观轨迹数据;换道意图识别
车辆行经交织区过程中,受同向行驶的多股车流影响,交通运行状况变得复杂,容易诱发追尾、剐蹭等交通冲突事件[1]。交织区一旦发生事故,必然迫使上游车辆产生强制换道等复杂各异的行驶行为,加剧交织区内部车流的紊乱程度。国内外学者主要从交通事件的检测和识别[2-3],以及交通事件对交通流的影响方面进行了相关研究[4-5]。从更为微观的角度探寻车辆换道行为的研究鲜见报道。
道路交通系统中,车辆的换道行为是基本的微观驾驶行为之一,对交通流的影响显著[6-7]。相较于跟驰行为,换道行为更为复杂,体现为车辆在运动过程中不仅受到同一车道前车的直接影响,还受到相邻车道车辆行为的间接影响。换道行为建模则是对车辆在换道过程中根据前后车及相邻车道车辆的运动状态调整自身运动状态的数学描述[8],其关键在于换道决策行为识别与建模。换道决策行为发生于驾驶人产生换道意图和执行换道动作之间,侧重于微观决策过程的表达及物理参数的标定[7],主要以驾驶人和道路环境为切入点来研究。驾驶人方面主要考虑驾驶风格[9]、驾驶人不满度[10]等因素,而道路环境方面则针对交织区[11]、高速公路出口[12]、高速公路浓雾环境[13]进行了研究。与智能网联车辆的换道行为和决策行为研究存在着诸多不同[14-17]。在建模的方法上,智能网联车辆对规则模型的使用频率较高;对于应用的具体道路,智能网联车辆换道行为、决策行为建模较少关注城市道路;在建模考虑的因素方面,智能网联车辆换道建模多考虑车辆动力学参数和周边车辆的影响进行模型构建,建立协同换道模型;在换道类型方面,智能网联车辆较少以强制/任意为区分进行换道建模。因数据的制约,现阶段换道决策建模仍较少综合考虑人-车-路作用的机理[18]。
目前,面向交织区换道决策建模的相关研究虽较为成熟,但针对事故瓶颈影响下的换道决策行为研究仍相对缺乏。事故瓶颈段微观轨迹数据的获取受限,制约了相关换道决策研究。因此,本研究基于社会力模型,分析交通事件下的换道决策行为,借助交织区事故瓶颈段车辆微观轨迹数据,以单车为对象,考虑其与周围环境的相互影响并建立协同换道决策模型;模型的输入为智能网联车辆能够实时获取的车辆位置、速度等相关数据,输出的换道方向和换道意愿明确,能够有效模拟事故影响下车辆换道决策行为,可为智能网联环境下遭遇交通事件的自动驾驶车辆设计拟人化换道决策和行为算法提供参考依据。
1 研究概述
突发瓶颈现象是指,由于交通事故或者交通作业等突发性事件造成的非常态交通瓶颈现象。一般体现为:交织区发生事故或进行施工时,会占用一条或多条车道,致使有效通行车道数减少,其他行经车辆为避让瓶颈区域须降速并强制换道,导致大量车辆在瓶颈路段上游积聚,交织区通行能力显著下降。本研究将瓶颈路段及其上游影响区所构成的区域定义为交织区突发瓶颈段,如图1所示。交织区发生事故时,为避让瓶颈区域,紧邻车辆产生换道意图,具体如下:
(1)保证安全的前提下,主动寻找间隙换道至相邻车道,以避开事故车辆尽快通过瓶颈路段;
(2)车辆换道决策过程中受到周围车辆,以及瓶颈处障碍物等空间实体的影响;
(3)周围车辆会对具有换道意图或特征的车辆采取避让措施,车辆间有一定协作关系;
(4)车辆倾向于换至有利于到达目标出口的车道。
突发瓶颈影响下的交织区车辆换道决策行为,可类比为社会力行人交通流模型[19]。社会力模型采用数理解析的方法描述行人在复杂环境下的运动过程,明确行人交通行为的产生源于自身的主观行动力,同时受到周围空间实体的排斥。
因此,为有效刻画突发瓶颈环境车辆复杂换道决策行为,本文改进社会力行人交通流模型,构建交织区突发瓶颈段协同换道决策模型,利用遗传算法进行标定,结合先验模型对其进行验证,研究框架如图2所示。
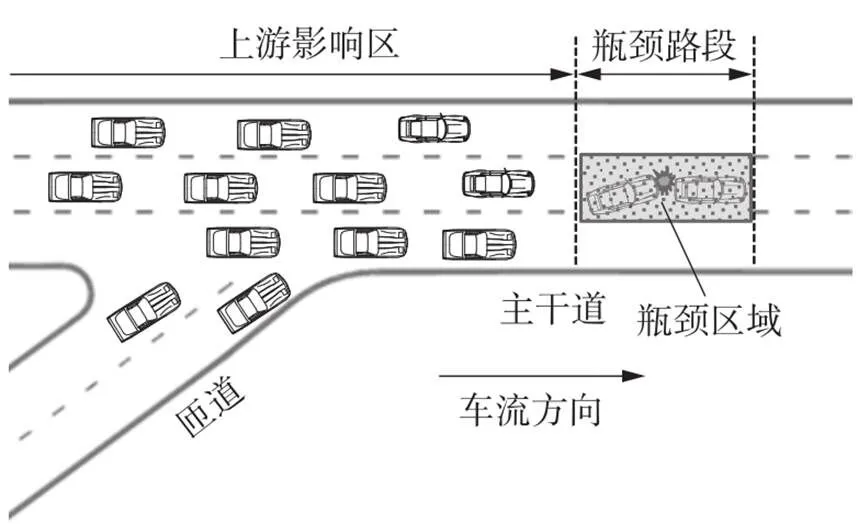
图1 交织区事故瓶颈段示意图

图2 研究框架
2 交织区突发瓶颈段协同换道决策模型
2.1 突发瓶颈段协同换道决策模型概述
车辆行进方向前方发生事故或进行施工时,因行驶受阻、交织需求、前车缓行,必然会产生换道意愿或动机,并会根据周围车辆运行状态,判断换道可行性和换道方向[20]。

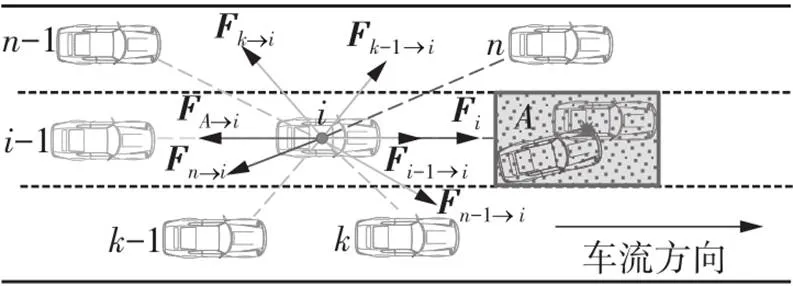
图3 决策阶段主车受力示意图
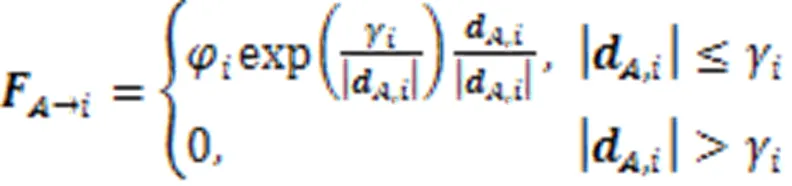
构建的协同换道决策模型,如式(1)所示:

2.2 自驱动力
构建主车自驱动力模型,如式(2)所示:

2.2.1期望速度修正函数

2.2.2等效质量


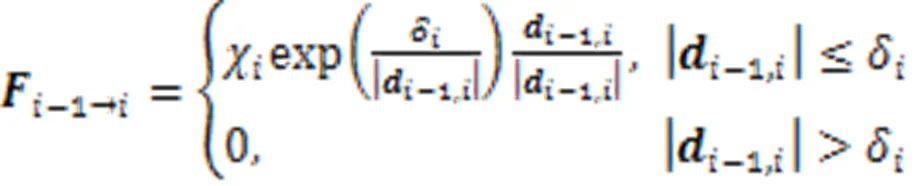
2.3 车辆间的排斥力
2.3.1同车道排斥力
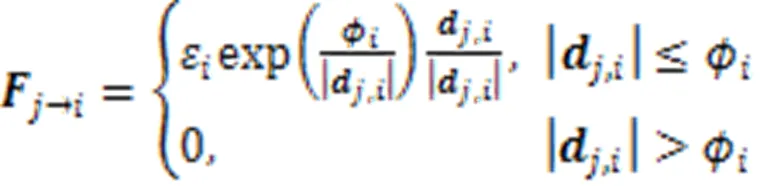
2.3.2相邻车道排斥力
2.4 瓶颈区域对车辆的排斥力
3 数据准备
选取某城市快速路多车道交织区事故为研究案例,获取该交织区发生事故时的视频数据,利用核相关滤波车辆跟踪优化算法,提取行经事故瓶颈段车辆微观轨迹、车种类型,经人工标定与验证,轨迹信息时间精度为0.125 s、空间精度为0.1 m/像素。数据颗粒度小,检测结果精度高,能够为协同换道决策模型的标定与验证提供量化依据。
为了协同换道决策模型的有效标定和误差验证,首先需要提取换道决策片段。本研究基于实例场景,提取行经交织区突发瓶颈段的车辆换道轨迹数据1 364条。如图4所示,绘制横向车速频率分布直方图,横向车速大于0时,表明车辆朝左侧行驶;反之,向右行驶。可以看出:
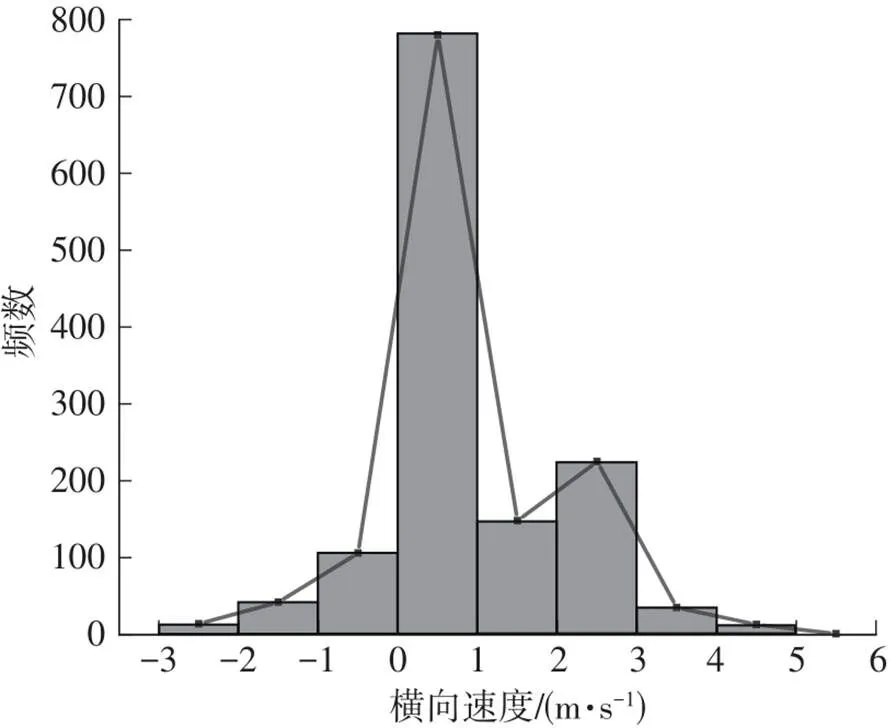
图4 驾驶人横向速度分布
(2)横向车速集中于0 m/s附近,说明大多数时候车辆未执行换道行为,但车辆实际面临事故瓶颈段时,会受到前方障碍、周围车辆互扰、自身换道意图等复杂条件影响,出现横向车速在0附近连续轻微摆动的情况,此时产生的横向车速不可作为车辆换道的判定依据。

4 模型参数标定与验证
4.1 参数标定
如前所述,基于突发瓶颈段车辆换道决策数据集的有效构建,可对协同换道决策模型进行参数标定。模型参数标定实质上是一个以参数为自变量,以仿真结果和真实数据之差最小为目标函数的非线性最优化问题。在此基础上进行变量约束,过程为:
(1)在确定协同换道决策模型结构的基础上,输入主车、周围车辆、事故点以及交织区的相关运行状态数据,可由协同换道决策模型仿真出主车受社会力情况,进而得知主车加速度变化情况;
(2)将仿真得到的主车加速度数据和实测的主车加速度进行曼哈顿距离比较,作为模型参数的误差指标;
(3)求解使误差指标最小化的模型参数,即为车辆协同换道决策模型的标定参数。
4.1.1优化算法
本文参数的标定采用非线性规划最优解的形式,也是目前有关模型进行参数标定比较常见的办法[26-27]。自变量为待标定的各个参数,目标函数取待标定模型的仿真数据与实测数据的最小差值。由于求解目标函数最小值涉及到向量运算,故选取更适用于度量向量间相似性的曼哈顿距离作为误差指标。目标函数值越小,曼哈顿距离和误差越小,表明两个向量越相似,如式(8)所示:

采用遗传算法求解目标函数,遗传算法具有鲁棒性强、不易陷入局部最优等优点[28],是一种模拟生物进化过程的全局随机搜索方法,通过对“染色体”群的不断“优胜劣汰”,得到最终“适应环境”的个体,从而得到模型参数的全局最优解,寻优过程如下:
(1)随机产生若干个体作为初始种群;
(2)逐个计算其适应度;
(3)根据遗传规律,对某代种群实施选择、交叉和变异操作,产生下一代种群;
(4)判断算法停止准则是否满足,如果不满足,返回步骤(2);如果满足,输出最大适应度值个体作为最优解,终止计算。
4.1.2参数设定
设置目标函数后,需根据参数实际特性,进一步设定模型参数约束条件[29]。根据车辆在交织区的协同换道决策特性,对模型参数设定如下。
(2)排斥力作用范围。本研究选取的研究场景为城市快速路多车道交织区,车流密度大,车辆行驶缓慢,当车辆间的距离超过限速值(100 km/h)时,彼此之间几乎没有影响[29],故考虑排斥力的作用范围的阈值为[0,100]m。
4.2 基于模拟场景的标定测试
考虑本研究提出的模型难以获取大量交织区事故瓶颈场景样例,因此构建模拟场景进行模型及标定方法测试[30-31]。

场景1、2车辆的具体空间位置分布见表1,输入模拟数据测试模型,结果表明,对于不同模拟场景,模型结果与期望结果相符,说明了模型的敏感性;此外,场景1、2结果呈相对对称分布,与模拟场景设定一致,这说明模型表现较为稳定、可靠。
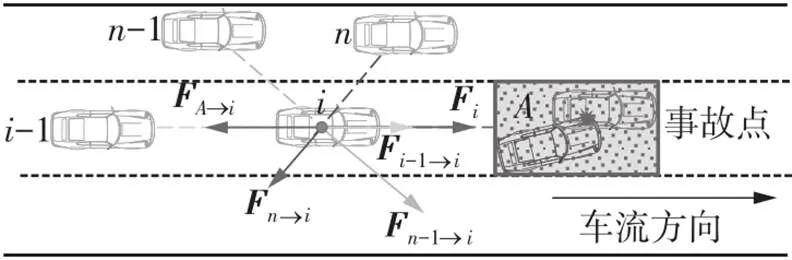
图5 交织区事故瓶颈段换道场景1

图6 交织区事故瓶颈段换道场景2
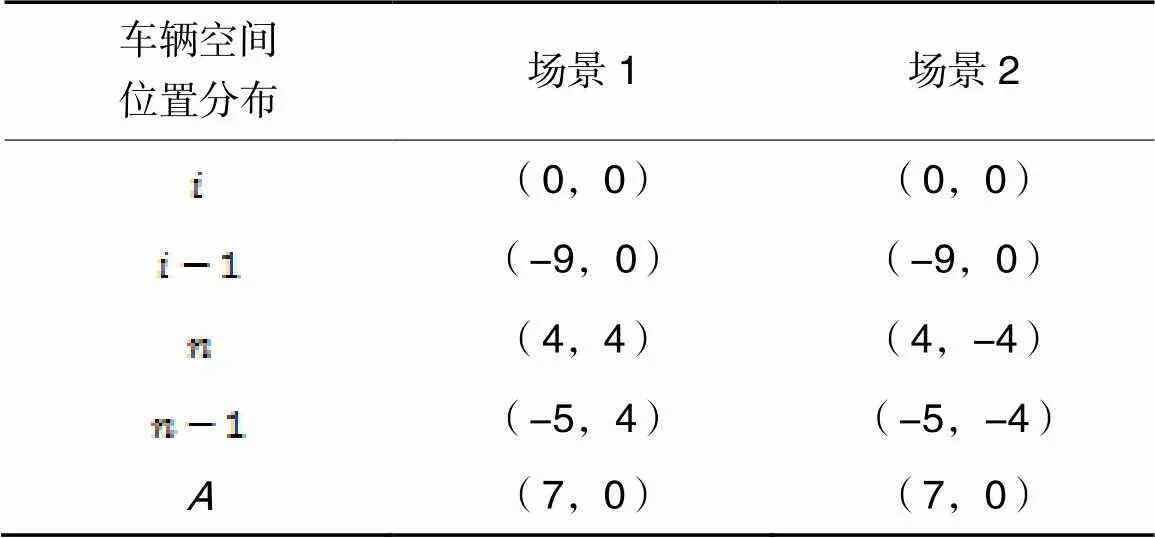
表1 两类场景中车辆位置参数
4.3 基于真实数据的标定测试
4.3.1模型标定
在模拟场景的标定测试基础上,以实例交织区实测事故瓶颈段数据标定协同换道决策模型参数,进一步验证模型的适用性和有效性[8]。

基于真实数据的标定验证过程如下:
(1)利用视频数据提取算法,获取1 364条事故瓶颈段车辆换道信息,每条信息包含车辆行进方向、瞬时车速、空间位置、瞬时加速度等;
(2)通过数据筛选和人工观看检验,最终获取832条有效换道决策事件数据集;
(3)选择换道决策事件开始帧作为标定数据集,借助遗传算法对模型进行标定,获得标定结果集和本研究提出的模型最优参数;
(4)选取标定数据集选取紧邻下一帧换道决策事件数据作为验证数据集,获得验证结果集。
由于遗传算法本身具有一定的随机性,为了尽可能找到最优解,每次标定过程连续重复60次,取误差最小的10次为最终结果。本研究提出的模型最优参数标定结果见表2,可以看出,主车对事故点的排斥强度高于对后车和相邻车道车辆的排斥强度,分布规律与模型设定结果一致,验证了模型标定方法的有效性。

表2 参数标定结果
4.3.2标定结果相似度分析
余弦相似度可衡量向量空间两个向量间差异大小,即两个向量夹角的余弦值,值越接近1,说明两个向量越相似。余弦相似度可用于计算加速度之间的相似度。
相较于余弦相似度只能衡量向量在方向上的相似性,调整后的余弦相似度能够从方向和大小两个维度对向量的差异进行比较,调整后的余弦相似度数值范围为-1至1,数值越接近1说明向量之间的相似程度越高[33]。使用调整后的余弦相似度计算加速度在横向和纵向上的相似度,如式(9)所示:
标定出模型结果后,以实测加速度r为基准,从横、纵向性能指标,分别验证基于实测数据标定结果s1、基于模型预测结果s2。计算得到调整后的余弦相似度结果表明:
(1)无论是横向加速度还是纵向加速度,实测数据r与标定结果s1的相似度都在0.99及以上,说明模型参数标定精度高,反映了本文标定方法和协同换道决策模型的有效性;
(2)基于+1时刻的换道决策事件得到的预测结果s2与实测数据r、标定结果集s1比较,横向加速度和纵向加速度方面的相似度均超过0.96,说明本研究构建的模型稳定、可靠、适用性强。
4.4 模型对比
最后,选取主动换道决策行为模型进行对比验证。该模型以社会力模型为基础,引入Gipps跟驰模型,并考虑了换道效用和安全间隙[26],与本研究提出的协同换道决策模型在基础框架与换道目标上一致。
将换道决策事件数据集分别输入主动换道决策模型和协同换道决策模型,选取换道决策行为(不换道、向左换道、向右换道)与换道意愿强度两个指标,对比模型预测效果。
4.4.1换道决策行为对比
上述2个模型对主车换道决策行为的预测情况分布如图7所示。
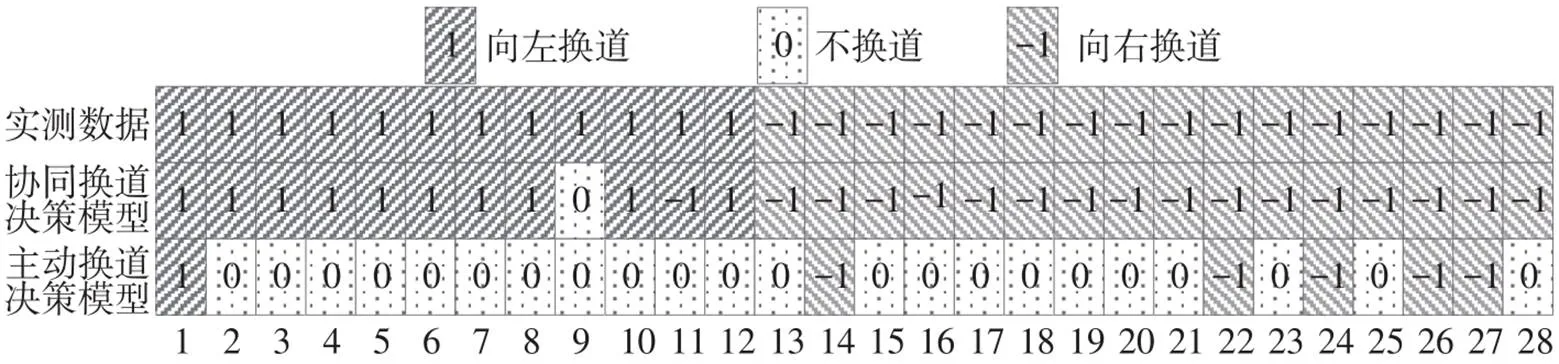
图7 不同驾驶人的换道决策行为分布
28组换道决策事件中,协同换道决策模型识别出26组,成功率达92.9%。主动换道决策模型识别出1组,成功率仅为3.6%,其中有22组不进行换道,这可能是因为主动换道决策模型中考虑了换道效用和安全间隙,在换道效用和安全间隙都符合条件的情况下,模型才能预测出主车的换道方向,在车流密度大、需进行强制换道的交织区事故瓶颈段不能满足主动换道决策模型所需的换道条件,故识别成功率低。
由此可见,本研究提出的协同换道决策模型对交织区事故瓶颈段中车辆换道决策行为的识别结果与实测数据基本一致,具有更强的适用性。
4.4.2换道意愿强度对比
可选用加速度大小描述车辆换道意愿强度[34],实测数据、协同换道决策模型标定结果、协同换道模型决策验证结果和主动换道决策模型验证结果如图8所示,可以看出:
(1)整体上,协同换道决策模型标定及预测结果与实测数据基本吻合,而主动换道决策模型预测结果与实测数据差异显著,说明本文模型可更好地预测交织区事故瓶颈段复杂的加速度变化规律,描述车辆实际行驶意愿;
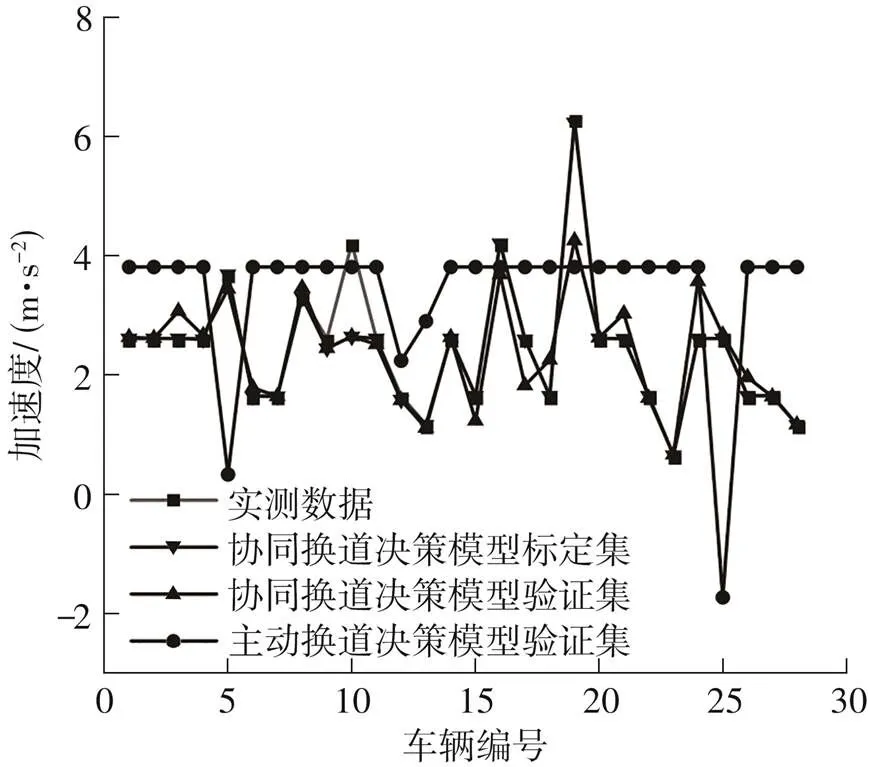
图8 对比验证阶段不同驾驶人的换道强度
(2)主动换道决策模型的换道意愿强度即加速度大都为3.807 m/s2,这可能是由于模型中车辆运行条件的效用函数采用了二元离散选择的方法,说明本研究构建的考虑车距、速度与换道连续相关性函数关系模型,在交织区事故瓶颈段更为适用。
4.4.3模型误差对比

如图9、表3所示。由此可知:
(1)协同换道决策模型显著优于主动换道决策模型,其中,标定结果最接近于真实值。
(2)误差平均值、标准差方面,相对主动换道决策模型,协同换道决策模型的标定结果和预测结果误差平均值分别降低0.928和0.825,误差标准差分别降低0.856、0.778,协同换道决策模型标定结果与预测结果均表现较优。
由上述RMSPE和RE指标的验证结果可知,本文构建的协同换道决策模型标定方法合理,预测结果可靠,可有效反映车辆行经事故瓶颈段的真实行为,精准刻画车辆换道决策过程。
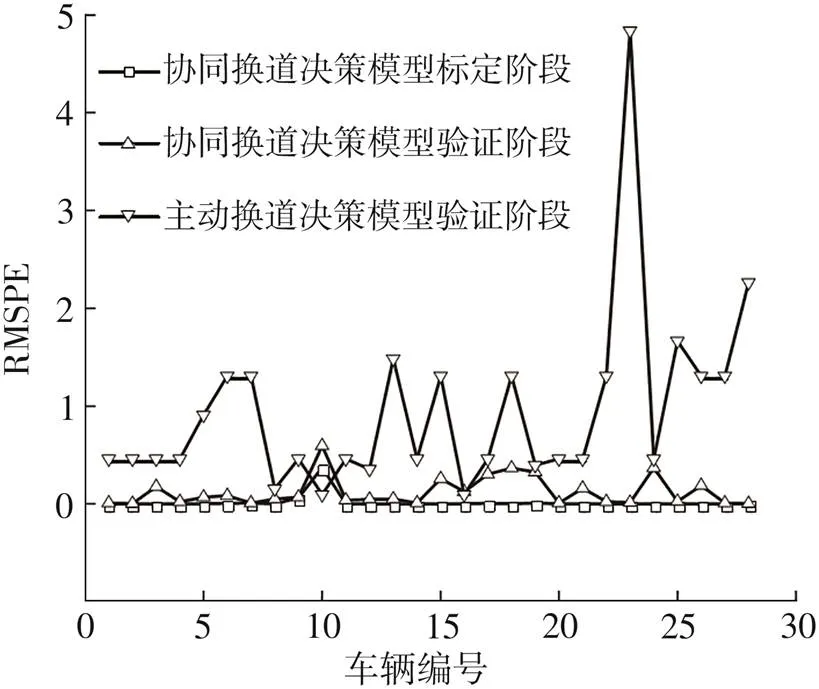
图9 对比验证阶段不同车辆换道强度的RMSPE
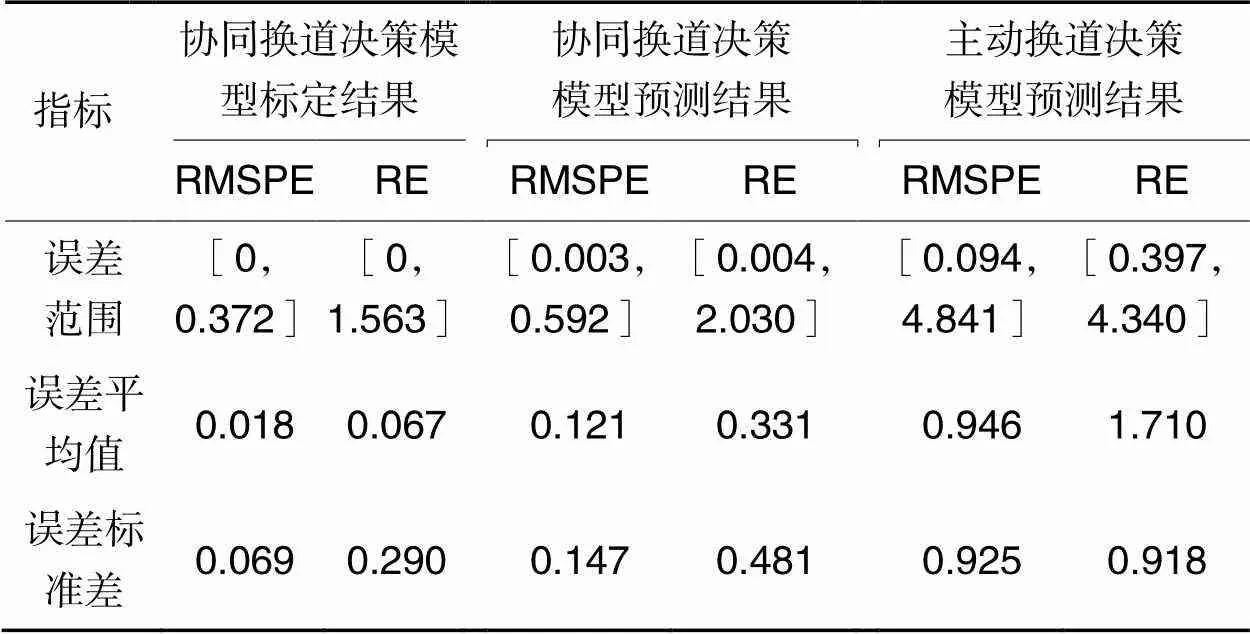
表3 对比验证阶段模型误差分布
5 结论
(1)本研究通过对微观轨迹数据进行特性分析,在社会力模型的基础上,构建车辆行经交织区事故瓶颈段协同换道决策模型,利用微观轨迹数据对模型进行了标定和验证,模型对车辆换道决策行为具有较高的识别与预测精度。
(2)相较于复杂的交织区事故瓶颈段场景,本研究构建的协同换道决策模型具有结构简单、函数输入输出关系明确、决策变化连续、对个体车辆行为差异适用性强等优势,可更加真实地刻画车辆在实际复杂交通环境下的决策过程,可为面向瓶颈路段的自动驾驶车辆换道决策提供实用度较高的结果。
(3)遗传算法的标定精度高,但形成的中间变量随机性、不确定性强,还需进一步研究。同时,本文模型中考虑了驾驶人风格,但限于数据样本种类限制,变量对模型的预测评价结果造成一定影响,有待后续获取多类场景驾驶人自然驾驶数据标定验证,进一步提升模型预测的准确性。
[1] ZHAO J,LIU P,XU C,et al.Understand the impact of traffic states on crash risk in the vicinities of type A weaving segments:a deep learning approach[J].Accident Analysis & Prevention,2021,159:106293.
[2] REN J,CHEN Y,XIN L,et al.Detecting and locating of traffic incidents in a road segment based on lane-changing characteristics[J].Transportmetrica A:Transport Science,2017,13(10):853–873.
[3] YANG D,WU Y,SUN F,et al.Freeway accident detection and classification based on the multi-vehicle trajectory data and deep learning model[J].Transportation Research Part C:Emerging Technologies,2021,130:103303.
[4] SUN C,PEI X,HAO J,et al.Role of road network features in the evaluation of incident impacts on urban traffic mobility[J].Transportation Research Part B:Methodological,2018,117:101-116.
[5] CAO D,WU J,DONG X,et al.Quantification of the impact of traffic incidents on speed reduction:a causal inference based approach[J].Accident Analysis & Prevention,2021,157:106163/1-14.
[6] DAS A,KHAN M N,AHMED M M.Detecting lane change maneuvers using SHRP2 naturalistic driving data:a comparative study machine learning techniques[J/OL].Accident Analysis & Prevention,2020,142:105578.
[7] WANG Z,SHI X,ZHAO X,et al.Modeling decentralized mandatory lane change for connected and autonomous vehicles:an analytical method[J].Transportation Research Part C:Emerging Technologies,2021,133:103441.
[8] 王殿海,陶鹏飞,金盛,等.跟驰模型参数标定及验证方法[J].吉林大学学报(工学版),2011,41(S1):59-65.
WANG Dian-hai,TAO Peng-fei,JIN Sheng,et al.Method of calibrating and validating car-following model[J].Journal of Jilin University (Engineering and Technology Edition),2011,41(S1):59-65.
[9] UO D,MA J,CHANG R.Lane-changing-decision characteristics and the allocation of visual attention of drivers with an angry driving style[J].Transportation Research Part F:Traffic Psychology and Behaviour,2020,71:62-75.
[10] 陈慧,王洁新.基于驾驶人不满度的高速公路自动驾驶换道决策[J].中国公路学报,2019,32(12):1-9,45.
CHEN Hui,WANG Jie-xin.A decision-making method for lane changes of automated vehicles on freeways based on drivers' dissatisfaction[J].China Journal of Highway and Transport,2019,32(12):1-9,45.
[11] 彭博,王玉婷,谢济铭,等.城市干线短交织区元胞自动机多级换道决策模型[J].交通运输系统工程与信息,2020,20(4):41-48,70.
PENG Bo,WENG Yu-ting,XIE Ji-ming,et al.Multi-stage lane changing decision model of urban trunk road’s short weaving area based on cellular automata[J].Journal of Transportation Systems Engineering and Information Technology,2020,20(4):41-48,70.
[12] 张兰芳,陈程,张佳妍,等.基于自然驾驶数据的高速公路出口换道决策模型[J].同济大学学报(自然科学版),2018,46(3):318-325,333.
ZHANG Lan-fang,CHEN Cheng,ZHANG Jia-yan,et al.Modeling lane-changing behavior in freeway off-ramp areas using naturalistic driving data[J].Journal of Tongji University(Natural Science),2018,46(3):318-325,333.
[13] 张青周,李振龙,曹政,等.高速公路浓雾环境下换道决策规则提取及决策算法[J].科学技术与工程,2019,19(21):303-308.
ZHANG Qing-zhou,LI Zhen-long,CAO Zheng,et al.Decision-making rule extraction and decision-making algorithm for lane change in dense fog environment[J].Science Technology and Engineering,2019,19(21):303-308.
[14] 李立,徐志刚,赵祥模,等.智能网联汽车运动规划方法研究综述[J].中国公路学报,2019,32(6):20-33.
LI Li,XU Zhi-gang,ZHAO Xiang-mo,et al.Review of motion planning methods of intelligent connected vehicles[J].China Journal of Highway and Transport,2019,32(6):20-33.
[15] WANG H,HUANG Y,KHAJEPOUR A,et al.Local path planning for autonomous vehicles: crash mitigation[C]∥ Proceeding of 2018 IEEE Intelligent Vehicles Symposium (IV).Changshu:IEEE,1602-1606.
[16] FENG Z,FU M,SONG W,et al.Decision making and local trajectory planning for autonomous driving in off-road environment[C]∥ Proceeding of 2020 3rd International Conference on Unmanned Systems (ICUS).Harbin:IEEE,1180-1186.
[17] FENG Z,SONG W,FU M,et al.Decision-making and path planning for highway autonomous driving based on spatio-temporal lane-change gaps[J].IEEE Systems Journal,2021:1-11.
[18] KUEFLER A,MORTON J,WHEELER T,et al.Imitating driver behavior with generative adversarial networks[C/OL]∥ Proceedings of 2017 IEEE Intelligent Vehicles Symposium (IV).Redondo Beach:IEEE,2017:204-211.
[19] 陈大飞.基于社会力的城市道路混合交通流建模与分析[D].长沙:中南大学,2011.
[20] DENG J-H,FENG H-H.A multilane cellular automaton multi-attribute lane-changing decision model[J].Physica A:Statistical Mechanics and its Applications,2019,529:121545.
[21] 杨达,苏刚,吴丹红.基于社会力模型的无车道划分异质交通流研究[J].交通运输系统工程与信息,2018,18(3):94-100.
YANG Da,SU Gang,WU Dan-hong.Non-lane-based heterogeneous traffic flow research based on social force model[J].Journal of Transportation Systems Engineering and Information Technology,2018,18(3):94-100.
[22] 邱小平,孙若晓,马丽娜,等.基于社会力的信号交叉口施工区交通流建模[J].交通运输系统工程与信息,2016,16(1):99-104.
QIU Xiao-ping,SUN Ruo-xiao,MA Li-na,et al.Modeling and analyzing of traffic flow on the work zone of urban signalized intersection based on social force[J].Journal of Transportation Systems Engineering and Information Technology,2016,16(1):99-104.
[23] YANG X,YANG X,LI Y,et al.Obstacle avoidance in the improved social force model based on ant colony optimization during pedestrian evacuation[J].Physica A:Statistical Mechanics and Its Applications,2021,583:126256/1-15.
[24] LI G,MA J,YANG Z.Characteristics of heavy vehicle discretionary lane changing based on trajectory Data[J].Transportation Research Record,2022,2676(3),258-275.
[25] ZHU M,WANG X,TARKO A,et al.Modeling car-following behavior on urban expressways in Shanghai:a naturalistic driving study[J].Transportation Research Part C:Emerging Technologies,2018,93:425-445.
[26] YANG D,ZHOU X,SU G,et al.Model and simulation of the heterogeneous traffic flow of the urban signalized intersection with an island work zone[J].IEEE Transactions on Intelligent Transportation Systems,2019,20(5):1719-1727.
[27] LIU S,WANG X,HASSANIN O,et al.Calibration and evaluation of responsibility-sensitive safety (RSS) in automated vehicle performance during cut-in scenarios[J].Transportation Research Part C:Emerging Technologies,2021,125:103037.
[28] 余朝军,江驹,徐海燕,等.基于改进遗传算法的航班-登机口分配多目标优化[J].交通运输工程学报,2020,20(2):121-130.
YU Chao-jun,JIANG Ju,XU Hai-yan,et al.Multi-objective optimization of flight-gate assignment based on improved genetic algorithm [J].Journal of Traffic and Transportation Engineering,2020,20(2):121-130.
[29] 禚保玲.基于社会力的同伴群走行模型研究[D].北京:北京交通大学.2014.
[30] 王建强,吴剑,李洋.基于人-车-路协同的行车风险场概念、原理及建模[J].中国公路学报,2016,29(1):105-114.
WANG Jian-qiang,WU Jian,LI Yang.Concept,principle and modeling of driving risk field based on driver-vehicle-road interaction[J].China Journal of Highway and Transport,2016,29(1):105-114.
[31] SAIFUZZAMAN M,ZHENG Z,MAZHARUL HAQUE M,et al.Revisiting the task-capability interface model for incorporating human factors into car-following models[J/OL].Transportation Research Part B:Methodological,2015,82:1-19.
[32] LI L X,WANG F Y.The automated lane-changing model of intelligent vehicle highway systems[C]∥ Proceedings of the IEEE 5th International Conference on Intelligent Transportation Systems.Singapore:IEEE,2002.
[33] LI A,JIANG H,LI Z,et al.Human-like trajectory planning on curved road:learning from human drivers[J].IEEE Transactions on Intelligent Transportation Systems,2020,21(8):3388-3397.
[34] 孙秦豫,付锐,王畅,等.人机协作系统中车辆轨迹规划与轨迹跟踪控制研究[J].中国公路学报,2021,34(9):146-160.
SUN Qin-yu,FU Rui,WANG Chang,et al.Vehicle trajectory-planning and trajectory-tracking control in human-autonomous collaboration system [J].China Journal of Highway and Transport,2021,34(9):146-160.
Cooperative Lane Change Decision-Making Model of Bottleneck Emergency Section in Weaving Area Based on Social Force
QIN Yaqin1QIAN Zhengfu1XIE Jiming1LIU Bing2ZHAO Rongda2WANG Yueran3HUANG Lei3
(1. Faculty of Transportation Engineering,Kunming University of Science and Technology,Kunming 650500,Yunnan,China;2. Yunnan Communications Investment & Construction Group Co.,Ltd.,Kunming 650103,Yunnan,China;3. Yunnan Science Research Institute of Communication Co.,Ltd.,Kunming 650011,Yunnan,China)
To describe the lane-changing decision mechanism of vehicles in the bottleneck section of weaving area and provide a lane-changing decision model in the emergency environment, this paper constructed a collaborative lane-changing decision model of vehicles facing bottleneck section based on the micro-trajectory information of vehicles and the human traffic flow model of social force. This model can provide a lane-changing decision method for the sudden bottleneck environment of intelligent network connection. Firstly, based on the characteristics of lane-changing decision of vehicles in the sudden bottleneck section, the vehicle equivalent mass model was constructed to improve the social force model by considering the types of vehicles and drivers. On this basis, the factors driving vehicle lane-changing were described as automatic driving force, repulsive force among vehicles and repulsive force of obstacles, and the collaborative lane-changing decision model was constructed. Then, 832 microscopic trajectory data of lane change decisions were selected and divided into calibration set and verification set. The model was calibrated using genetic algorithm with acceleration as index and Manhattan distance as objective function. The validity of the calibration method was verified based on simulated data and measured data. Finally, this model was compared with the active lane changing decision model in lane changing direction identification, lane changing intention intensity and model prediction error. The results show that the success rate of lane change direction recognition of the proposed model is 92.6%, the output lane change intention intensity is basically consistent with the measured data, and the predicted RMSPE value decreases by 0.825 on average and RE value decreases by 1.379 on average, which are significantly better than those of the active lane change decision model. The research results can provide a theoretical basis for the identification of vehicle lane change intention in the bottleneck section of intelligent network environment and traffic management and control under emergencies.
weaving area;emergency;lane changing decision;social force;genetic algorithm;micro-trajectory data; lane change intention recognition
Supported by the National Natural Science Foundation of China (71861016) and the National Key Research and Development Program of China (2018YFB1600500)
U491
1000-565X(2022)07-0066-10
10.12141/j.issn.1000-565X.210787
2021-12-10
国家自然科学基金资助项目(71861016);国家重点研发计划项目(2018YFB1600500)
秦雅琴(1972-),女,博士,教授,主要从事交通系统安全与仿真研究。E-mail: qinyaqin@kust.edu.cn
谢济铭(1994-),男,博士,主要从事城市干道交通状态识别与演变研究。E-mail: xiejiming@stu.kust.edu.cn
猜你喜欢
美食(2022年2期)2022-04-19
英语文摘(2021年10期)2021-11-22
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
汽车维修与保养(2020年11期)2020-06-09
VOGUE服饰与美容(2019年10期)2019-12-02
女报(2019年3期)2019-09-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
作文周刊·高二版(2019年43期)2019-01-06
