
融合功能性电刺激的助行康复外骨骼机器人混合控制策略研究进展
2022-10-19 01:39董洪涛
中国生物医学工程学报 2022年3期
孟 琳 侯 捷 董洪涛 刘 源 徐 瑞 明 东#*
1(天津大学医学工程与转化医学研究院,天津 300072)2(天津大学精密仪器与光电子工程学院,天津 300072)
引言
截止2017年,全球脑卒中死亡率下降了33%,但发病率不降反升,仅中国带病生存的脑卒中患者高达1300 万[1-2]。 其中80%~90%的卒中患者病后存在行走障碍的后遗症,严重影响患者生活质量,给患者家庭及社会带来沉重经济负担[3-4]。 传统康复方法通常是临床医生配合器械,指导患者进行被动重复功能性动作训练,使其经长期康复训练后恢复部分或全部运动功能。 然而,仅约有40%~50%的患者可在这种强化治疗中获益[5],仅有少数偏瘫患者能恢复到正常步行程度[6]。 近年来,医疗技术提高与科技水平发展促进了康复辅助手段的兴起和快速发展,一方面有效缓解了康复医疗人力资源的紧张状况,另一方面较传统康复方法,功能性康复技术更侧重于患者运动功能的重建、替代、训练和适应,有望极大地提高患者生存质量。
功能性电刺激(functional electrical stimulation,FES)通过对人体肌肉施加刺激电流,激活肌肉收缩,从而使患者能够自主完成相应动作[7]。 FES 在实现功能性运动辅助的同时,可以增强肌力以及促进神经可塑性,从而提高运动康复效果[8]。 该技术最早被应用于足下垂的矫正[9],现已被广泛应用于下肢康复[10-15]。 虽然FES 对患者运动功能康复已有实际应用及商业化产品,但仍存在明显的局限性,如:电刺激驱动肌肉的力矩有限,肌肉作为非线性元件难以精准控制,同时长时连续电刺激易引发肌肉疲劳等,这些问题严重限制了基于FES 的运动康复系统的实际临床应用。
近年来,研究者们提出了融合FES 与下肢康复机器人的混合控制方法:一方面利用外骨骼机器人或矫形器的高效力矩驱动优势,弥补FES 对患者肌肉驱动不足的缺陷,同时有效延缓电刺激引发肌肉疲劳的发生[16-18];另一方面,通过FES 激活肌肉自主收缩,可以实现患者最大程度的主动康复训练[19-20]。 研究者们认为FES 与外骨骼机器人驱动相结合,发挥了两种康复技术的优势,实现了更为优化的主被动结合的康复辅助模式[21-24]。
笔者综述了面向助行康复的FES 与外骨骼混合控制策略研究现状,分别从FES 与被动矫形器结合的单向控制方法和与主动外骨骼结合的混合控制方法剖析了其相关技术与难点(见图1),讨论了构建人机信息交互环路的关键问题,以及如何设计出合理高效混合控制策略,以实现动态控制分配,并对本领域未来发展方向进行总结与展望。
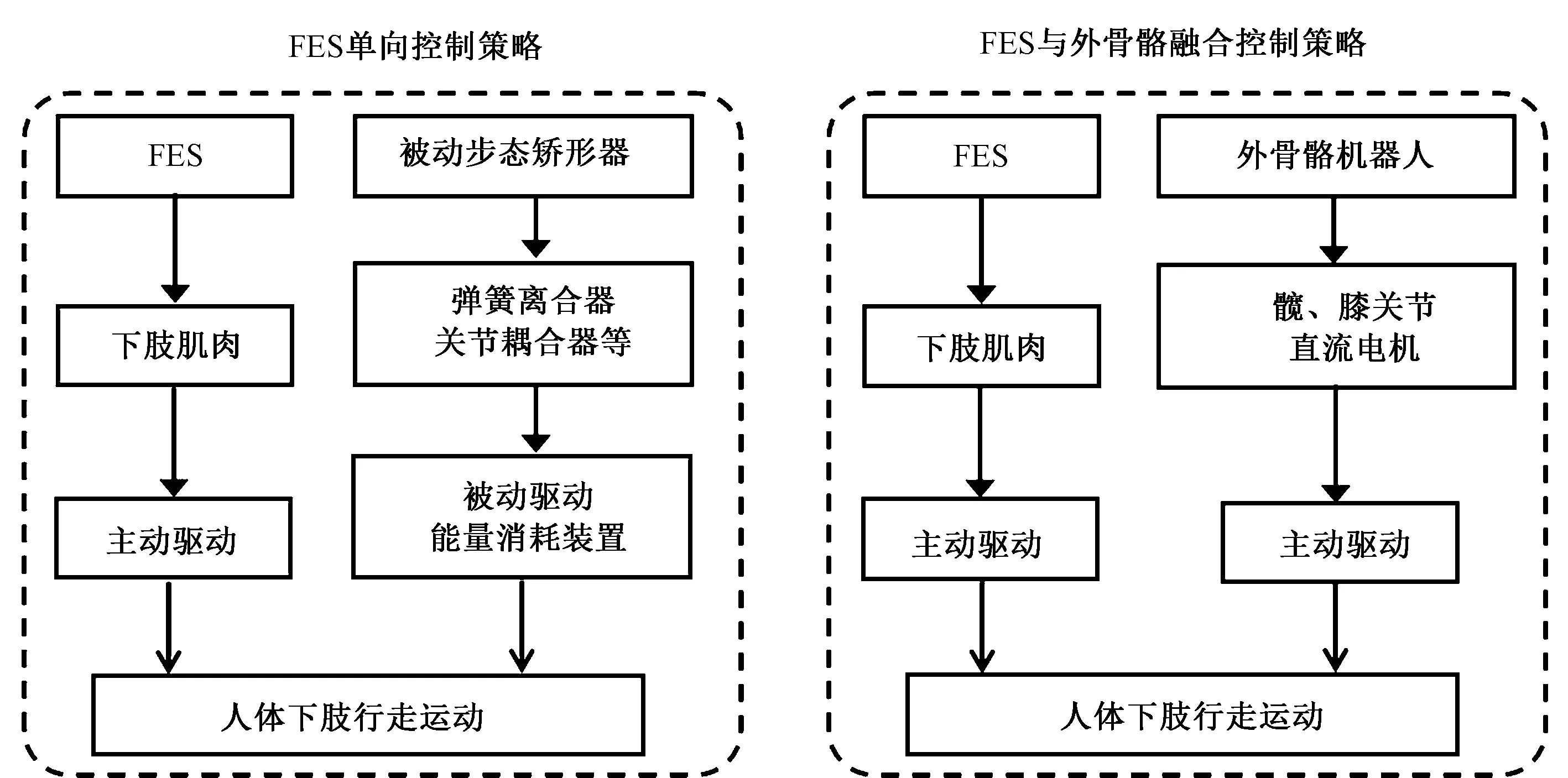
图1 融合FES 与下肢康复机器人的混合控制策略分类原理Fig.1 Schematic diagram of the classification principle of hybrid FES-robotic control strategies
1 FES 单向控制策略
FES 与矫形器结合的下肢助行系统多采用足踝矫形器(ankle-foot orthosis, AFO)、膝-足-踝矫形器(knee-ankle-foot orthosis, KAFO)和髋-膝-足-踝矫形器(hip-knee-ankle-foot orthosis, HKAFO)。 矫形器虽然不具备主动驱动的功能,但其可在步态周期站立阶段通过限制或锁死关节为患者提供支撑作用,或采用弹簧离合器、关节耦合器等储能机械设计实现关节的驱动,从而降低FES 的驱动力矩需求[25]。 因此,矫形器与FES 结合的混合系统控制模型以FES 控制为主,即FES 单向控制,其控制策略可分为开环FES 和闭环FES 方法(见表1)。
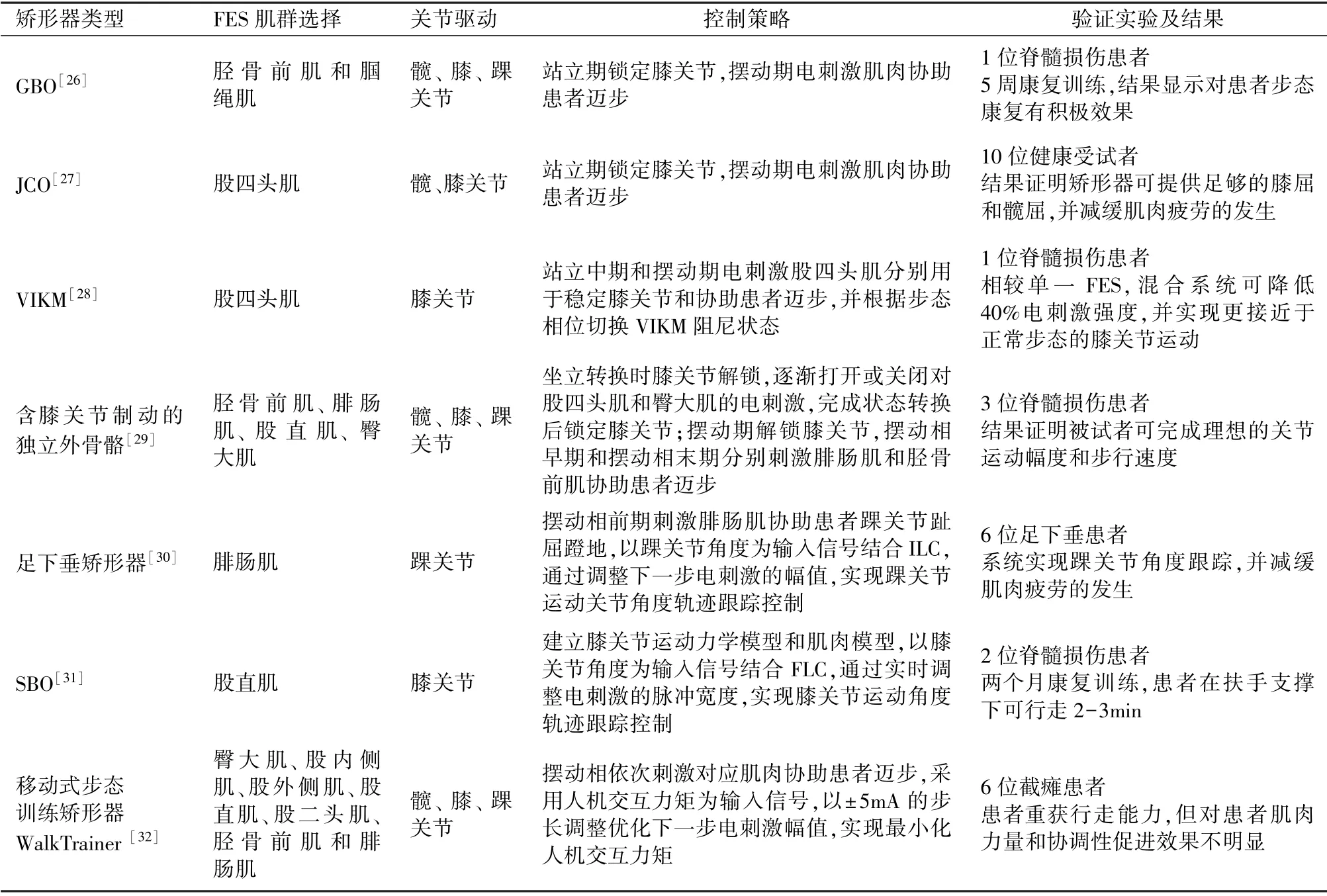
表1 FES 与矫形器结合的单向控制策略总结Tab.1 Summary of unidirectional FES-orthosis control principles
开环FES 控制方法通常在步态摆动期对选定肌肉施加电刺激,驱动关节运动,以完成相应摆动动作,但不能对运动关节角度或力矩进行精确控制。 FES 控制模式的开关(on/off)由穿戴者所处步态相位阶段控制。 步态相位检测多采用过足底开关[26],手动开关[27],或者基于运动学信号的机器学习识别模型[28-29]实现,如图2 所示。 Krishnamoorthy等[26]和Farris 等[27]设计的FES-矫形器混合助行系统,结合了FES 与平衡重力式矫形器GBO(gravitybalanced orthosis) 和关节耦合矫形器JCO(jointcoupled orthosis),分别采用了足底开关和手动开关判断站立期和摆动期,站立期锁定膝关节,摆动期施加电刺激于对应肌肉,协助患者完成迈步动作。Bulea 等[28]和Chang 等[29]采用有限状态机(finite state machine, FSM)方法,通过运动信号(足底开关、膝关节角度、惯性测量单元(inertial measurement unit, IMU)运动信息)进行五个步态相位阶段识别,从而实现更复杂的FES 时序控制。 Bulea 等[28]在站立中期和摆动期电刺激股四头肌,分别用于稳定膝关节和协助患者迈步,相较单一FES,混合系统可降低40%电刺激强度,并实现更接近于正常步态的膝关节运动。 Chang 等[29]设计的FES-矫形器助行系统,增加了坐姿和站立的状态转换功能,状态转换时膝关节解锁,依序打开或关闭对股四头肌和臀大肌的电刺激,完成状态转换后重新锁定膝关节。
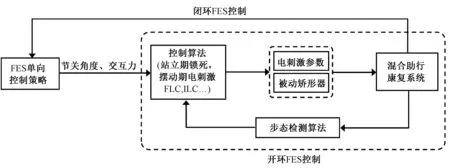
图2 FES 单向控制策略原理Fig.2 Schematic diagram of unilateral FES-orthosis control strategies
然而,开环FES 控制策略采用固定刺激模式,参数无法根据被试者进行个体化及实时调整,其辅助力矩可能无法满足患者运动需求。 闭环FES 控制策略采用人机交互信息,例如,根据关节角度[30-31]、人机交互力矩[32]和人工智能控制算法,实时调整FES 控制参数,驱动患者患肢达到更理想的运动关节角度轨迹,并有效降低运动过程中患者与矫形器之间的交互力矩,在提高患者主动康复参与度的同时保证使用安全性和舒适性。
现有研究多采用关节角度作为闭环FES 控制反馈信号。 Seel 等[30]通过放置于脚面的IMU 传感器的6 轴信息实现了踝关节角度测量与步态相位阶段识别,基于预设关节角度轨迹实时反馈踝关节角度误差, 采用迭代学习控制(iterative learning control, ILC)算法,调整下一步态周期的电刺激幅值。 Jailani 等[31]建立了膝关节运动力学模型和仿真肌肉输出力矩与FES 参数关系的肌肉模型,基于预设关节角度轨迹和模糊逻辑控制(fuzzy logic control, FLC)算法,反馈膝关节角度误差,实时调整电 刺 激 脉 冲 宽 度。 Stauffer 等[32]结 合WALKTRAINER 助行矫形器和14 导FES 发展了下肢混合助行系统,通过矫形器上的力传感器实时反馈当前步态周期的交互力矩,基于最小化人机交互力矩方法,调整优化下一步态周期的电刺激幅值,幅值调整步长为±5 mA。
2 FES 与外骨骼融合控制策略
融合FES 与外骨骼机器人的助行康复系统可以有效对患者肌肉主动运动与外部辅助进行自适应调整,从而提高患者主动康复的效果。 其中关键技术难点在于如何设计合理高效的融合控制策略,以实现FES 与外骨骼之间的动态控制分配。 现有研究的控制策略主要可分为外骨骼主控和交互控制,其基本原理如图3 所示。
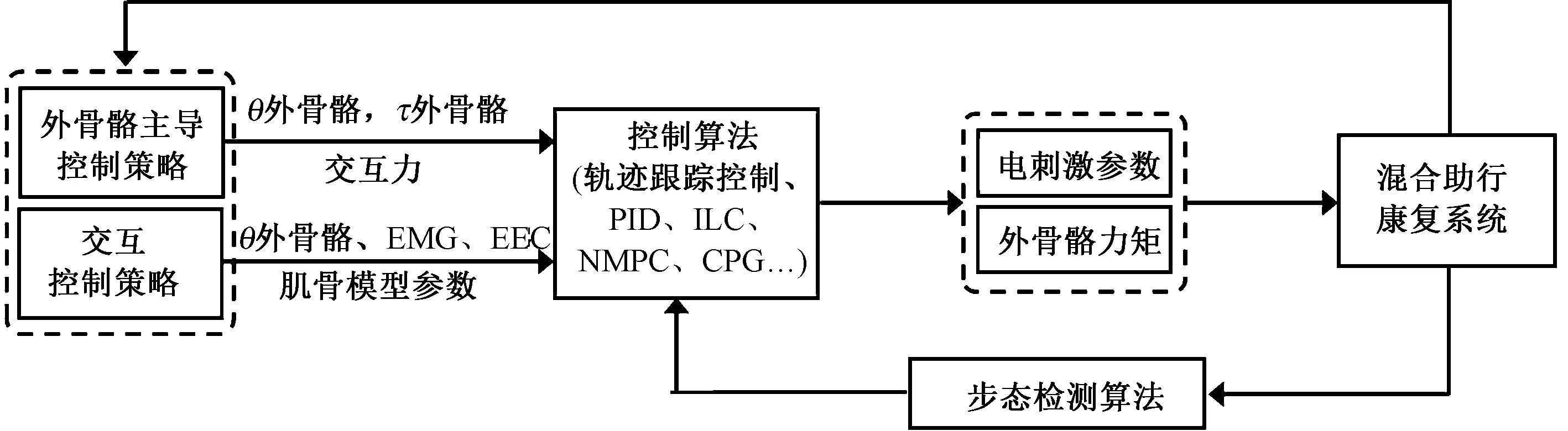
图3 FES 与外骨骼融合控制策略原理Fig.3 Schematic diagram of cooperative FES-exoskeleton control strategies
2.1 外骨骼主导控制策略
外骨骼控制模型多数采用基于关节角度反馈的PID(proportional-integral-derivative, PID)控制、PD(proportional-derivative, PD)控制和自适应控制(adaptive control)等方法(见表2):基于健康被试者数据建立运动学模型,获得预定关节角度轨迹,通过实时反馈关节角度以调节电机输出力矩,实现理想关节角度轨迹跟踪[33-39];相对的,FES 系统大多采用开环控制模型,基于所处步态阶段实施相应FES开关控制[33-36],电刺激参数固定。
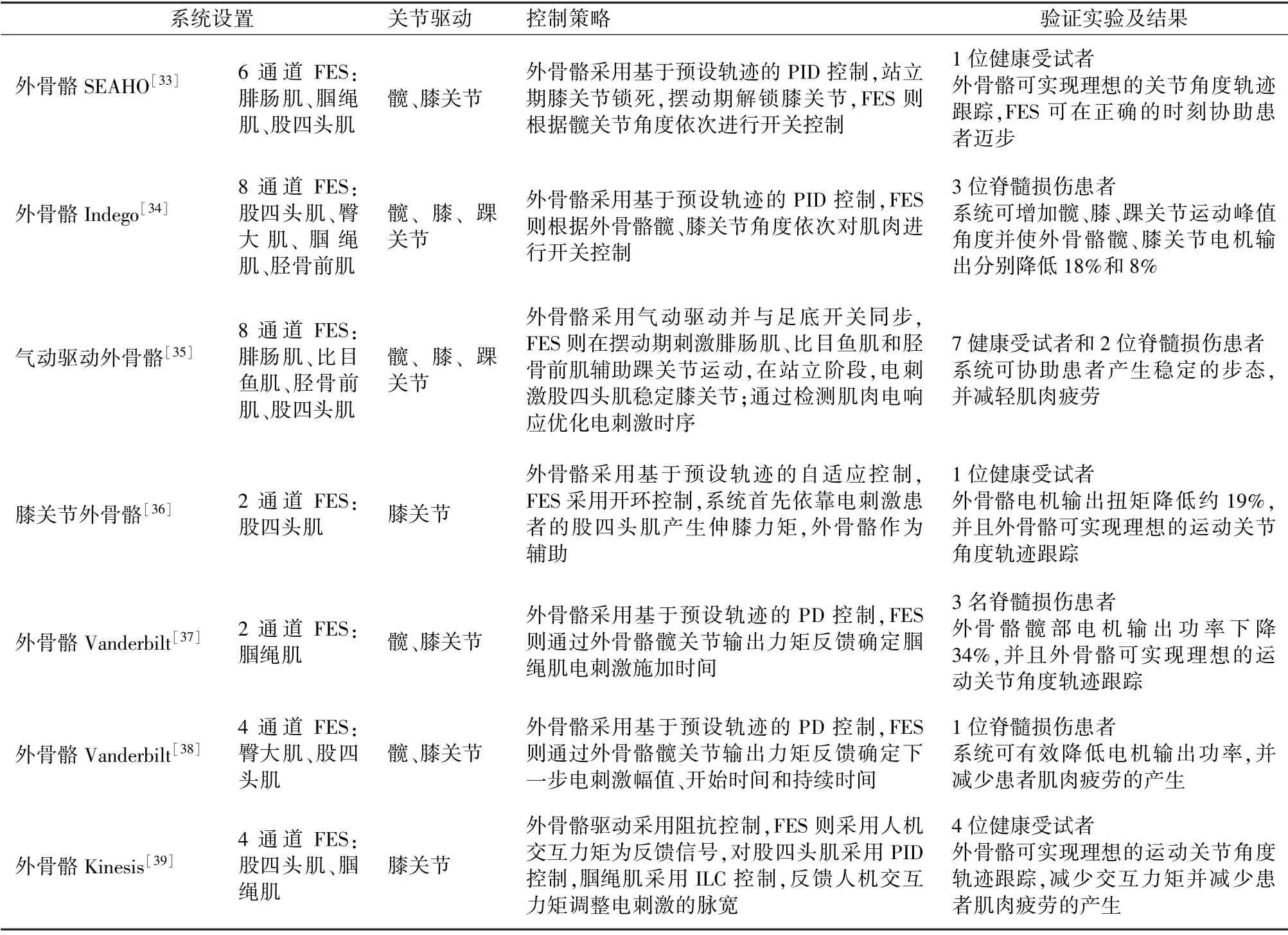
表2 外骨骼主导的控制策略总结Tab.2 Summary of exoskeleton-leading control principles
Kirsch 等[33]研发的髋关节驱动混动外骨骼(semi-active hybrid orthosis,SEAHO),利用手动开关结合有限状态机算法区分迈左腿、迈右腿和站立期三种步态阶段,外骨骼基于理想角度轨迹对髋关节进行PID 闭环控制,FES 则依据髋关节角度进行切换,其具体控制过程为:站立期外骨骼锁死膝关节,为患者提供足够支撑;摆动期外骨骼解除膝关节锁死并驱动髋关节运动,依据髋关节角度变化依次对腓肠肌、腘绳肌和股四头肌施加电刺激,协助患者完成踝关节趾屈蹬地、膝关节屈曲和伸展。 Spencer等[34]提出了相似的控制策略,实现了协助患者完成从坐姿到站立的运动转换。 3 位脊髓损伤患者参与实验,结果表明,与不使用FES 相比,混合驱动系统可使外骨骼髋关节、膝关节电机输出扭矩分别降低18%和8%。 Kurokawa 等[35]设计的混动外骨骼,利用足底开关判断站立期和摆动期,髋关节采用气动驱动并与足底开关同步,FES 则依据足底开关进行切换,其具体控制过程为:在站立阶段,电刺激股四头肌以稳定膝关节,在摆动期电刺激腓肠肌、比目鱼肌驱动踝关节趾屈,随后电刺激胫骨前肌帮助踝关节屈曲完成迈步动作。 运动实验中,通过检测肌肉的电刺激响应(M 波)对肌肉疲劳状态进行评定,并且通过优化电刺激时序以减少多通道肌肉电刺激引发的响应干扰。
Alouane 等[36]基于膝关节运动学模型提出了自适应控制方法:利用关节角度信号对电刺激下股四头肌产生力矩进行估计,并作为系统模型的外部干扰输入;理想关节角度和实际关节角度作为自适应控制器的输入信号,确定电机补偿力矩幅值,实现膝关节运动角度轨迹跟踪控制。 其模型优势在于不需要复杂的肌肉骨骼模型,有效降低了算法复杂度。 对一位健康受试者的验证实验表明,混合系统可使外骨骼电机输出扭矩降低约19%。
研究者们提出利用交互信息和智能控制方法,实现更高效的混合驱动。 Kevin 等[37]利用外骨骼髋关节输出力矩建立了肌肉输出力矩估计模型用于调整下一步态周期电刺激幅值、开始时间和持续时间,对3 位脊髓损伤患者的验证实验表明,混合系统可使外骨骼电机输出扭矩降低约34%。 该团队亦提出了基于人机交互力矩的肌肉疲劳检测方法,如果当前步态周期内的主动输出力矩幅值小于前一步态周期的最大输出力矩的三分之一,则判定患者出现肌肉疲劳状况,系统将停止电刺激2 min[38]。Del-Ama 等[39]提出了以人机交互力矩作为反馈的FES 双闭环控制模型,即不同肌肉采用不同的FES控制模型:对股四头肌(膝关节伸展运动)采用PID控制,对腘绳肌(膝关节弯曲运动)则采用ILC 控制,在模型中通过最小化交互力矩来调整电刺激脉冲宽度。 同时,根据人机交互力矩调节膝关节驱动器刚度,提高外骨骼输出稳定性。 Del-Ama 同样考虑了肌肉疲劳模型,通过计算基于电刺激的肌肉力矩相对时间的积分TTI(torque time integral, TTI)评估肌肉疲劳状态,当TTI 下降达到19%时认为出现肌肉疲劳,停止施加电刺激。
2.2 FES 与外骨骼交互控制策略
由于外骨骼主导的控制策略未能有效实现FES和外骨骼的交互控制以及驱动输出的动态分配,因此,有研究者提出了FES 与外骨骼交互控制策略:通过预定义的理想关节运动轨迹和基于反动力学的下肢运动力学模型,估算关节所需总驱动力矩,基于所需力矩,根据特定控制算法在FES 和外骨骼驱动间进行分配,结合下肢肌肉模型,实现对电刺激参数和电机力矩输出的动态调整(见表3)。
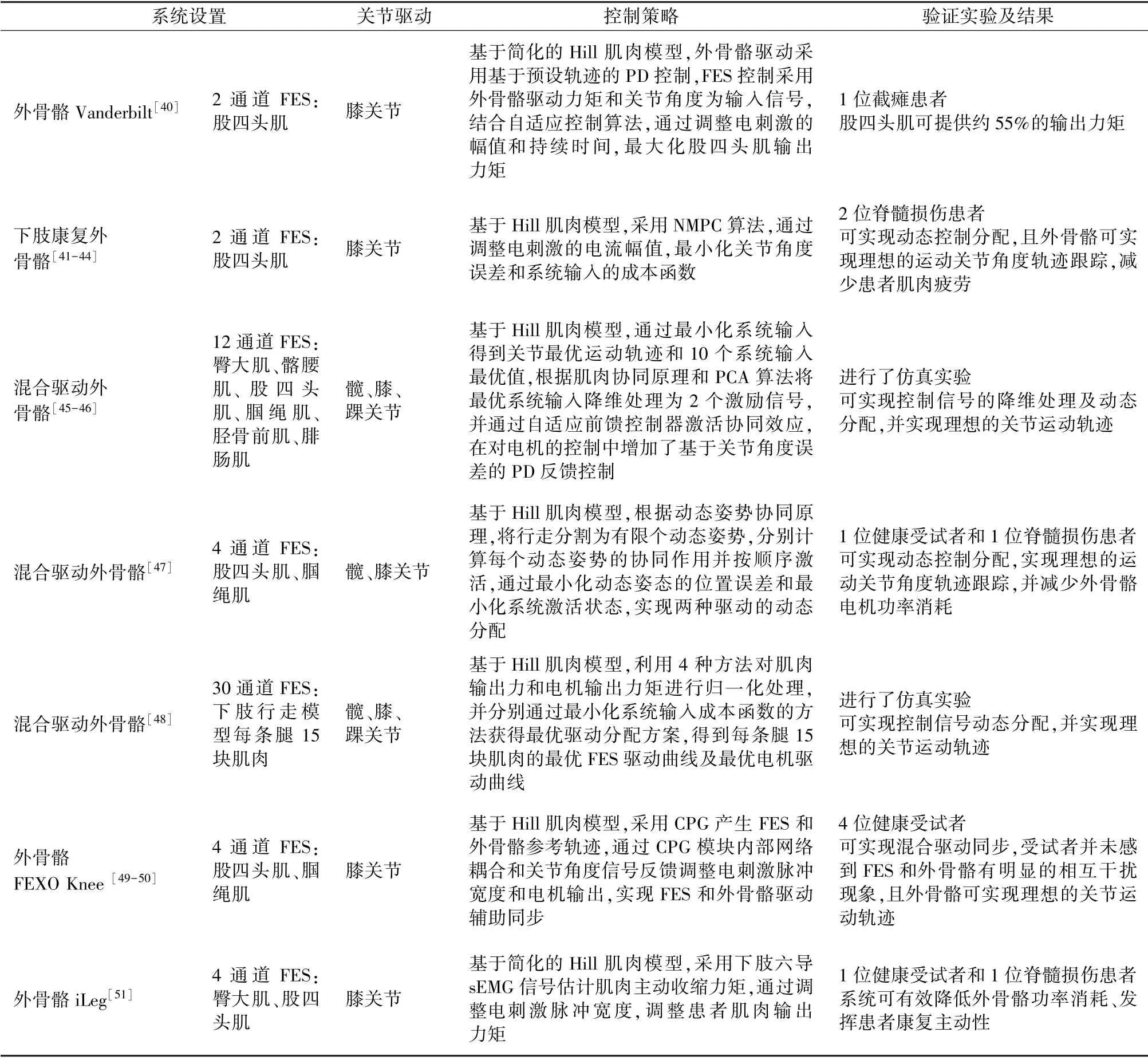
表3 FES 与外骨骼交互控制策略总结Tab.3 Summary of cooperative FES-exoskeleton control principles
研究者多采用Hill-type 肌骨模型来估计电刺激的肌肉输出力矩[52-53]。 该模型描述了肌肉的激励、收缩动力学和疲劳效应,但其算法复杂。 因此,一些研究者提出了简化模型,将电刺激强度与肌肉输出力矩的关系简化为延时和增益两个特征参数[40],或利用神经网络模型对肌骨系统建模[51]。
在肌肉建模的基础上,研究者们提出了最大化肌肉输出力矩,外骨骼驱动辅助的交互控制策略。Quintero 等[40]研发了膝关节驱动混合控制方法,以关节角度为反馈基于预设轨迹进行外骨骼PD 闭环控制,另一方面以关节角度和外骨骼输出力矩为输入信号,结合梯度投影算法,通过实时调整电刺激的幅值和持续时间,最大化股四头肌输出力矩。 研究者对一名截瘫患者进行了系统验证实验,结果表明FES 下股四头肌驱动在运动中输出功率占比可达到55%,但该方法有可能导致肌肉的快速疲劳。
研究者们还提出了最小化系统输入的控制策略。 Kirsch 等[41]提出了基于关节角度误差和系统输入的成本函数最小值优化方法,结合非线性模型预测控制( nonlinear model predictive control,NMPC)方法[42-44],实现了两种驱动间的动态分配,并增加对肌肉疲劳的建模。 研究者对2 名脊髓损伤患者进行系统验证实验,结果表明系统可实现理想的控制动态分配和关节运动轨迹,减少了患者肌肉疲劳。 Alibeji 等[45-46]在混合髋膝踝电机、6 通道FES 和支撑腿主动驱动的单腿10 输入、4 自由度下肢运动模型中,通过最小化系统输入得到关节最优运动轨迹和10 个系统输入最优值,并利用肌肉协同原理将最优系统输入降维处理为2 个激励信号[54]。该系统设计了应用于协同效应激活的自适应前馈控制器,在对电机的控制中增加了基于关节角度误差的PD 反馈控制,提高了系统稳定性和鲁棒性。在此基础上Alibeji 等[47]提出了动态姿势协同(dynamic postural synergies)控制方法,将行走分割为有限个动态姿势,分别计算每个动态姿势的协同作用并按顺序激活,通过最小化动态姿态的位置误差和最小化系统激活状态,实现两种驱动的动态分配。 Alibeji 等后续的研究通过增加肌肉疲劳建模,实现了对肌肉疲劳状态的检测。 Romero-Sanchez等[48]利用4 种方法对肌肉输出力和电机输出力矩进行归一化处理,并分别计算系统输入最小的成本函数,以获得最优驱动分配方案,最终得到下肢行走模型对每条腿15 块肌肉的最优FES 驱动曲线及最优电机驱动曲线。
此外,一些研究者还提出了基于中枢模式发生器(central pattern generators, CPG)的仿生控制方法,以感觉反馈自动激活运动驱动单元,产生步行、奔跑等节律性运动模式,不仅降低了运动控制回路的延迟时间,而且有效降低了对控制信号维数的要求[55-58]。 Ren 等[49-50]用CPG 模块内部网络耦合和外来信号反馈实现了FES 和外骨骼驱动辅助同步。Ren 团队利用4 个相互耦合的Matsuoka 神经振荡器构成的CPG 网络,来生成FES 和下肢外骨骼的参考轨迹,其中,两个振荡器相互组合用于生成FES 的参考轨迹,另外两个振荡器相互组合用于生成外骨骼的参考轨迹。 FES 控制采用在线调节模块将实测的关节角度作为FES 两个Matsuoka 振荡器的反馈信号输入,实现FES 的参考轨迹和实测的关节角度同步,结合反运动学模型和Hill-type 肌肉模型实时调整电刺激脉冲宽度;膝关节电机基于外骨骼参考轨迹进行PID 闭环控制,其控制原理如图4 所示。研究者对4 位健康受试者进行系统验证实验,利用实际交互力矩评价控制系统的有效性,结果表明系统可实现FES 和外骨骼驱动同步,且外骨骼可实现理想的关节运动轨迹。
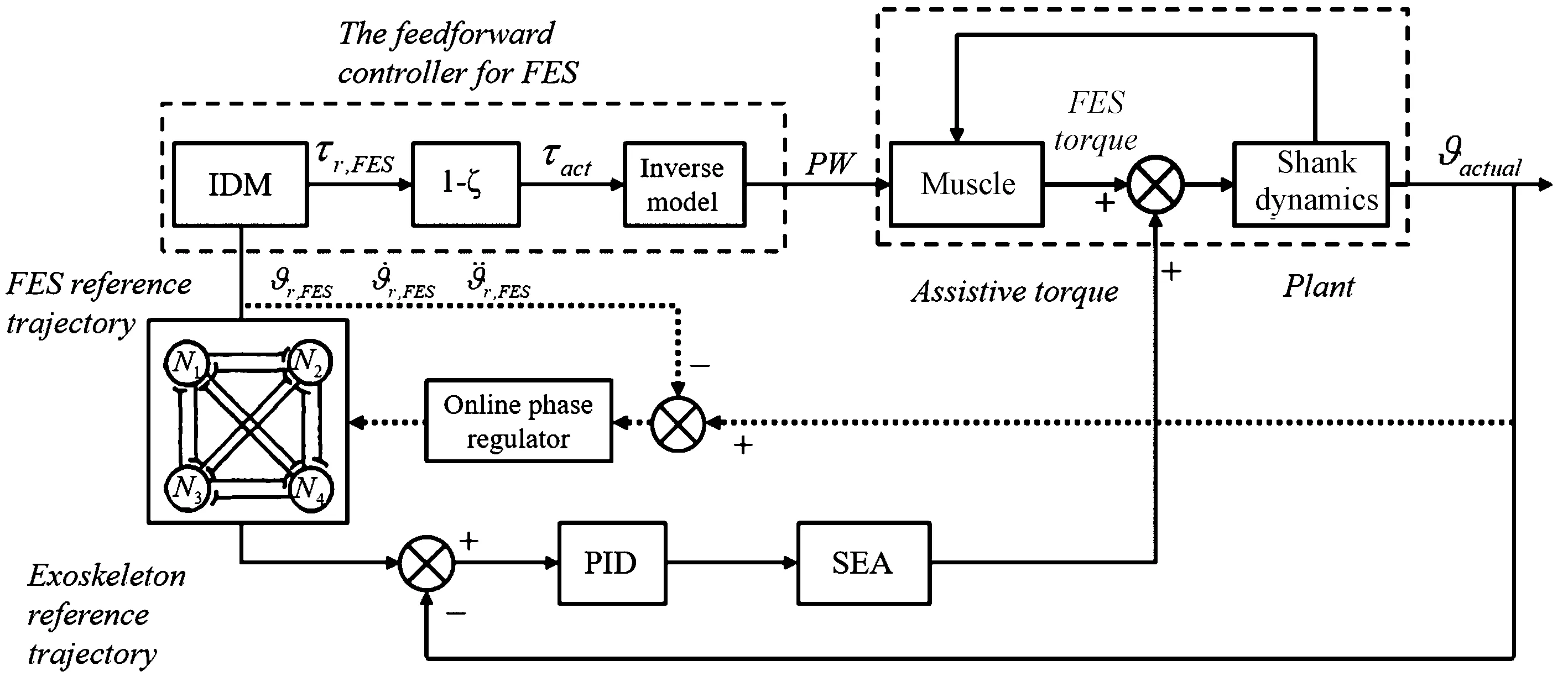
图4 FEXO Knee 下肢康复外骨骼交互控制原理图[50]Fig.4 Interactive control diagram of FEXO Knee [50]
2.3 基于电生理信号的交互控制策略
基于生物电信号的控制策略是人机交互技术的重要基础。 将表面肌电(surface electromyography,sEMG)[51,59]、 脑电 (electroencephalogram, EEG)[60-62]等电生理信号作为控制器输入,通过识别患者运动意图,实现对FES 以及外骨骼的控制。 Chen等[51]在iLeg 下肢康复外骨骼中,髋膝关节驱动器采用阻抗控制,臀大肌和股四头肌的FES 则采用前馈+反馈的控制方法:在前馈控制中,利用下肢六导sEMG 信号估计患者肌肉的主动收缩力矩[63-65],进而确定FES 的脉冲宽度,使电刺激强度与肌肉的主动力矩成正比来激发患者的自主运动,实现康复训练的正反馈的效果;反馈控制则利用外骨骼驱动力矩计算肌肉输出力矩与期望值之差调整电刺激的脉冲宽度,并通过与FES 的前馈控制相结合,进一步提高了系统稳态精度[66],对一位健康受试者和一位脊髓损伤患者的验证实验证明了控制系统的有效性。
脑-机接口(brain-computer interface, BCI)是在人脑与计算机或其他电子设备之间建立的不依赖于常规大脑信息输出通路(外周神经和肌肉组织)的全新对外信息交流和控制技术,可通过采集和解码EEG 信号以获取用户的意图,从而实现对外围设备的控制[67-70]。 一些研究者提出了BCI 与FES 结合的康复策略,通过运动意图检测激活对肌肉的电刺激,由感觉反馈形成闭环,以获得更好的运动康复效果[71-74]。 Chung 等[74]研发了基于运动想象(motor imagery, MI)的脑-机接口,通过解码患者运动意图触发对胫骨前肌的电刺激,对10 位脊髓损伤患者的实验表明,与单独的FES 康复训练相比,FES与BCI 相结合对患者的平衡和步态改善有更好的效果。 Irimia 和Poboroniuc 等[61-62]发展了BCI 与FES 和外骨骼相结合的系统,其中外骨骼提供辅助驱动和轨迹控制作用。 Irimia 等[61]利用BCI 判断患者左、右手臂的屈伸运动意图,触发对肱二头肌、肱三头肌的电刺激和肘部电机驱动。 5 位脊髓损伤患者的实验结果表明,该系统可实现患者手臂运动功能的改善。 然而,目前基于BCI 的FES 与外骨骼交互控制策略的相关研究较少,仍待深入研究。
3 总结与展望
融合FES 和外骨骼机器人的混合助行康复系统发挥了两种康复方法的优势。 研究者们已经证明了混合控制策略的可行性,FES 驱动肌肉自主运动一方面可提高患者主动康复参与度,另一方面其产生的驱动力矩可有效减少外骨骼的功率需求,从而降低机械系统的尺寸和重量。 外骨骼机器人的高效力矩驱动优势可以弥补FES 对患者肌肉驱动不足且难以实现精确控制的缺陷,提高运动辅助驱动效果。 笔者综合分析了现有混合控制策略的技术特点及已有系统的临床实验结果,多数混合康复系统仍处于实验室阶段,临床被试数量不足,且对于合理有效的混合控制策略的设计尚无一致性结论。 面向研究领域亟待解决问题,研究者们可从以下几个方面开展深入研究,以实现更安全、高效的混合康复系统。
1)构建人机信息交互紧密环路,实现精确运动意图识别,提高患者主动康复参与度。 现有研究采用运动学信号(足底开关、膝关节角度、IMU 运动信息)、电生理信号(如肌电)等结合智能算法检测识别患者运动意图,未来随着生物信号传感技术的不断发展,可用于运动意图检测的信号种类将大大拓宽,例如基于运动想象的脑-机接口等,系统可根据患者运动意图自适应地调整FES 参数和外骨骼辅助,实现“按需协助”和患者“所思即所动”的理想运动控制效果,结合触觉、听觉等多模态反馈,可进一步提高患者康复训练的积极性和康复效果。
2)设计更合理高效的混合控制策略,并提高混合驱动系统的安全性。 研究者们已提出基于CPG仿生模型、Hill-type 肌肉模型等方法对外骨骼和FES 控制进行动态分配,未来随着控制算法的改进以及对人体神经肌骨模型建模的深入研究,有望实现更精细的混合驱动控制,使康复机器人能随患者柔顺运动,避免对人体造成二次伤害,提高系统的安全可靠性。
3)推进混合助行康复系统的临床应用。 现阶段,大多数系统的控制策略仍处于实验验证阶段,仅进行了少量患者测试,并且多数研究仅进行了单次实验,尚无专门研究证明混合康复技术对患者长期康复的效用,因此需要进一步的临床测试来证明系统的有效性和安全性。
目前,我国运动障碍患者基数庞大,智能康复机器人技术有着巨大的社会需求与应用市场。 随着微型传感、电子、机械等高新技术的不断发展,混合助行康复系统有望作为更有效的康复手段,应用于临床康复,造福广大患者。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年3期)2022-06-17
能源工程(2022年2期)2022-05-23
新视线·建筑与电力(2021年2期)2021-09-10
小哥白尼(野生动物)(2021年12期)2021-03-29
直升机技术(2020年2期)2020-06-16
轻兵器(2019年5期)2019-06-21
电机与控制学报(2018年9期)2018-05-14
山东青年(2016年12期)2017-03-02
