基于模糊PID的无人机空中加油轨迹跟踪控制
2022-11-01 10:54蔺玺坤梁晓龙任宝祥侯岳奇张志浩
兵器装备工程学报 2022年10期
蔺玺坤,梁晓龙,任宝祥,侯岳奇,张志浩,齐 铎
(1.空军工程大学空管领航学院,西安 710051; 2.陕西省电子信息系统综合集成重点实验室, 西安 710051)
1 引言
空中加油技术是飞机在飞行过程中以管道形式对接,实现飞机间燃油输送,以增加受油机航程、航时的技术。空中加油概念最早于二十世纪初提出,至今经历近一个世纪的发展。通过空中加油,可延长受油机滞空时间,大幅提高作战半径,增强作战效能。在朝鲜战争中,空中加油技术首次应用于实战,并在海湾战争、伊拉克战争中发挥重要作用,例如争夺制空权、情报侦察、目标跟踪等任务都需要空中加油技术作为支撑。近年来,随着无人机技术的迅猛发展,无人机在实际作战中的运用愈发广泛,以无人机代替有人机执行长时间侦察、监视任务已是常态。但无人机体积小、携带燃油少的缺点限制其进一步发挥,通过空中加油,能弥补无人机在航程、滞空时间和起飞重量等方面的短板,提升其作战效能。现阶段,无人机空中加油技术主要分为无人机加油-有人机受油,有人机加油-无人机受油,无人机加油-无人机受油3种场景。2021年6月,美国海军利用MQ-25“黄貂鱼”实现无人机向有人机进行空中加油,这也标志着无人机空中加油技术初步形成作战能力。
现阶段对无人机空中加油对接段的控制问题主要为约束条件下满足无人机性能的制导律设计或航迹跟踪问题。Ochi将导弹制导律与降落引导方法引入无人机对接过程,将比例导引法与视线角结合处理问题,基于加油机与受油机对接时速度相同的约束条件,提出相应的控制方法。Burn利用Dubins曲线,以最短对接时间为性能指标,在速度、加速度等动力学约束条件下,采用动态逆法设计对接控制率。Smith基于已知的加油机飞行航线,利用状态估计器预测对接点,提出在线更新的自适应调节控制率。但文献[6-7]存在控制率设计复杂、在线频繁更新等问题,可能导致受油机出现信号延迟、滞后等现象。郭军通过修改固定目标终端碰撞角约束,采用反步法设计控制率来实现对阶段跟踪。张吉璇等基于地面全站仪高精度标定技术,利用差分GPS解算加受油机的坐标定位,算法简单、快捷,但其仅依靠GPS坐标转换,对地面全站仪基准标定有较高要求。鲜炜嘉在分析航路融合式与定点式空中加油会合策略后,基于非线性导引律通过设置目标路径上的虚拟目标迭代计算受油机的前置受控角,实现受油机加速度控制,可满足不同航向角条件下的会合控制。张博连设计改进了LQR-PI控制器,具有较好的抗干扰能力。李华东基于制导回路与控制回路分离的设计理念,利用制导、控制一体化方法设计受油机飞控系统,采用相对视线角模型完成受油机的精确跟踪,但对非线性控制考虑不足。华艺欣通过分析“有人-无人”与“无人-无人”加受油策略,采用经典PID控制建立空中加油控制率,但存在一定的超调、振荡现象。
本文中通过对无人机空中加油流程分析,基于状态-事件-条件-动作(SECA)规则提出无人机空中加油自主决策规则,针对空中加油过程中对接轨迹跟踪阶段,提出了基于模糊PID控制的轨迹跟踪方法,降低无人机的速度超调量,提高飞行稳定性,进而保障无人机空中加油安全完成。
2 无人机空中加油轨迹跟踪问题建模
2.1 四旋翼无人机动力学模型
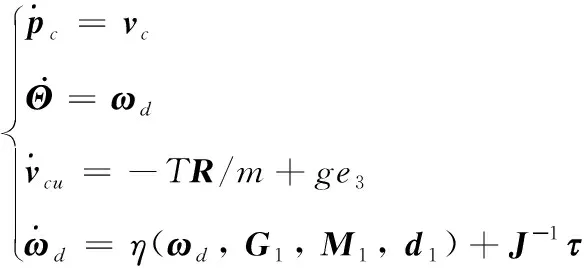
由于四旋翼无人机具有强耦合、非线性的特点,为了便于建立数学模型,将其视为均匀对称的刚体,几何中心与重心重合,并忽略空气阻力。则四旋翼无人机的运动学模型和动力学模型可描述为:
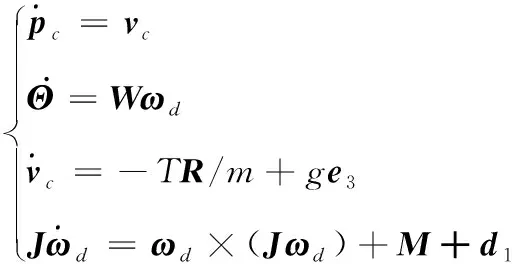
(1)
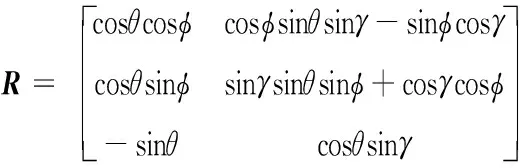
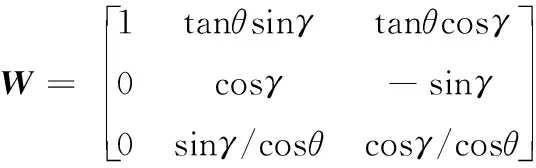
式中:=[,,],=[,,]表示无人机在北东地坐标系中的位置、速度,=[,,]表示无人机的欧拉角,即横滚角,俯仰角,俯仰角;=[,,]表示无人机在机体坐标系中的角速度;=[,,]为无人机的转动惯量;=[0,0,1]为单位矩阵;与为重力加速度与无人机的质量;=+++为无人机4个电机产生的总拉力;为四旋翼模型的不确定性;为无人机总转矩,即=++,为陀螺转矩,为气动转矩,=[,,]为旋翼对无人机的扭矩;机体坐标系到北东地坐标系的转换矩阵与欧拉矩阵为:
(2)
(3)
根据四旋翼无人机的飞行特点,其飞行过程中的俯仰角和滚转角较小,因此可将欧拉矩阵简化为单位矩阵。用(,,,)表示无人机所受的总扰动,即:
(,,,)=[,,]
(4)
则四旋翼无人机模型可简化为:
(5)
2.2 无人机轨迹跟踪控制系统
四旋翼无人机分层控制系统可以看作是以位置速度控制系统为外环,以姿态控制系统为内环,二者耦合的级联系统,位置速度控制外环的输出就是姿态控制内环的输入,如图1所示。
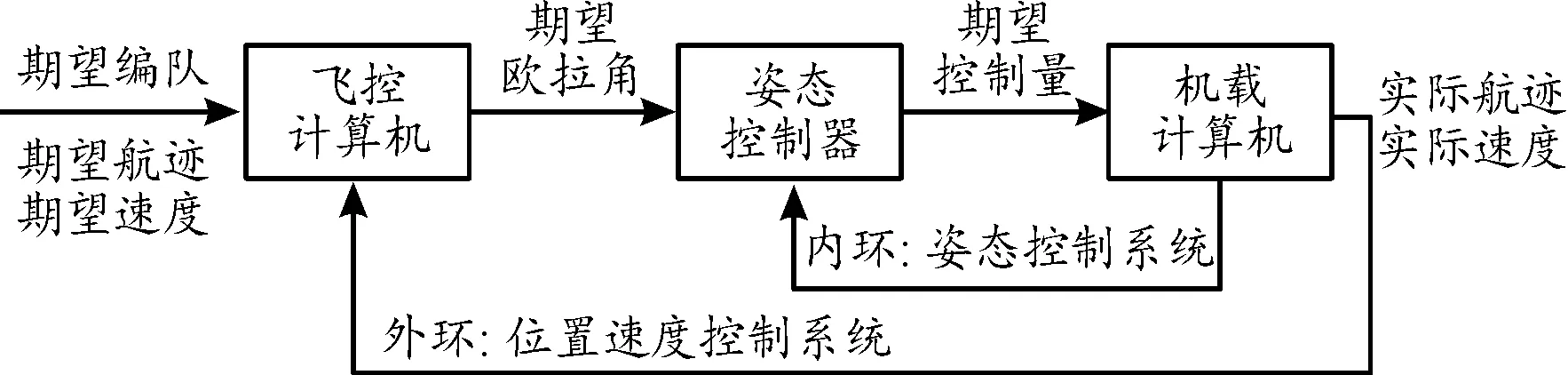
图1 无人机分层控制原理框图Fig.1 UAV layered control schematic diagram
将位置速度控制外环输出的控制向量设为:
=[,,]
(6)

(7)
=-T/m+
(8)
姿态控制内环的输入为期望拉力,期望欧拉角=[,,]。那么可用非线性解耦方程将外环与内环进行连接。

(9)

(10)

(11)
姿态控制内环根据输入量计算真实输出的控制量[,,,],其与电机转速[,,,]的关系为:
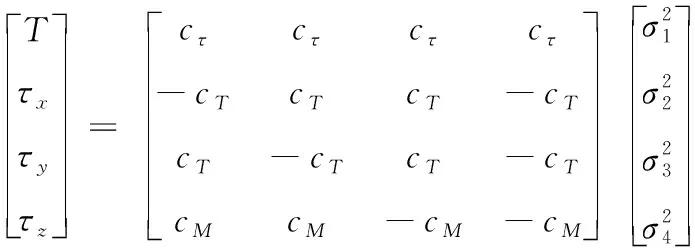
(12)

3 基于模糊PID的无人机控制器设计
传统PID控制方法具有算法简洁、修改快捷、性能稳定等特点,但传统PID控制方法的参数恒定,抗干扰能力较弱,对于无人机飞行过程中振荡、扰动等情况响应能力存在一定的局限性。模糊PID控制方法具有较好的抗干扰能力,可以根据反馈信息进行系统参数实时调整,提高系统响应速度、鲁棒性等。
3.1 模糊控制原理
模糊控制根据模糊规则与模糊推理算法对系统输入量依次进行模糊化处理,确定隶属度,规则推理,解模糊处理等步骤,最终输出相应参数。如图2所示。
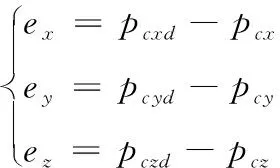
模糊PID控制是将模糊控制器与PID控制器相结合,利用模糊控制器根据传感器反馈信息对PID控制器的参数进行调整,解决传统PID控制参数恒定的缺点。在模糊控制中的差值与差值变化率由加油机、无人机的定位坐标解算而来:
(13)
(14)
式中:=[,,]为模糊控制器输入差值;=[,,]为无人机在北东地坐标系中的期望位置;=[,,]为无人机在北东地坐标系中的当前位置;=[,,]为模糊控制器输入差值变化率。
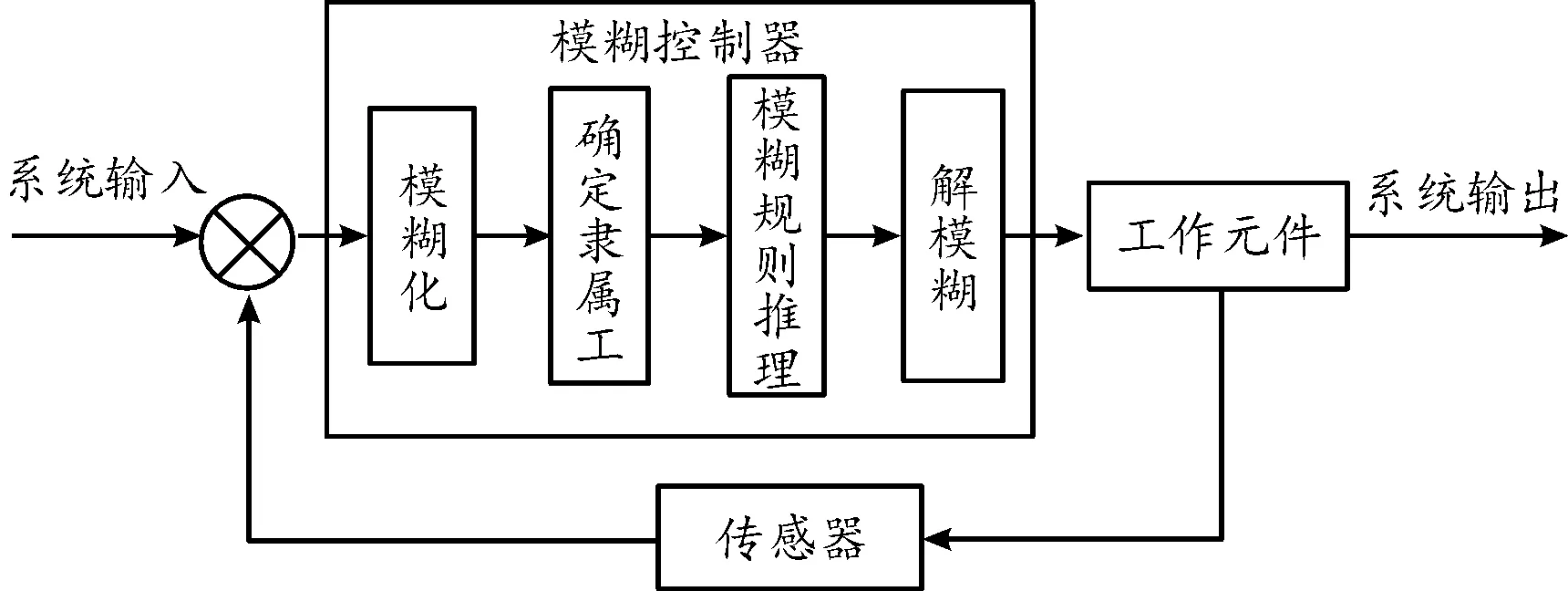
图2 模糊控制流程框图Fig.2 Fuzzy control principle block diagram
当加油机与受油机建立通信连接后,受油机机载计算机接收加油机发出的轨迹信息,解析当前位置与期望位置的差值与差值变化率,输入模糊控制器内对PID控制参数进行修正,同时对飞控计算机发出机动指令;飞控计算机根据机动指令输出电机控制指令,无人机做出机动动作快速靠拢期望位置,并根据模糊控制器输出的修正参数调整控制率。其原理如图3所示。
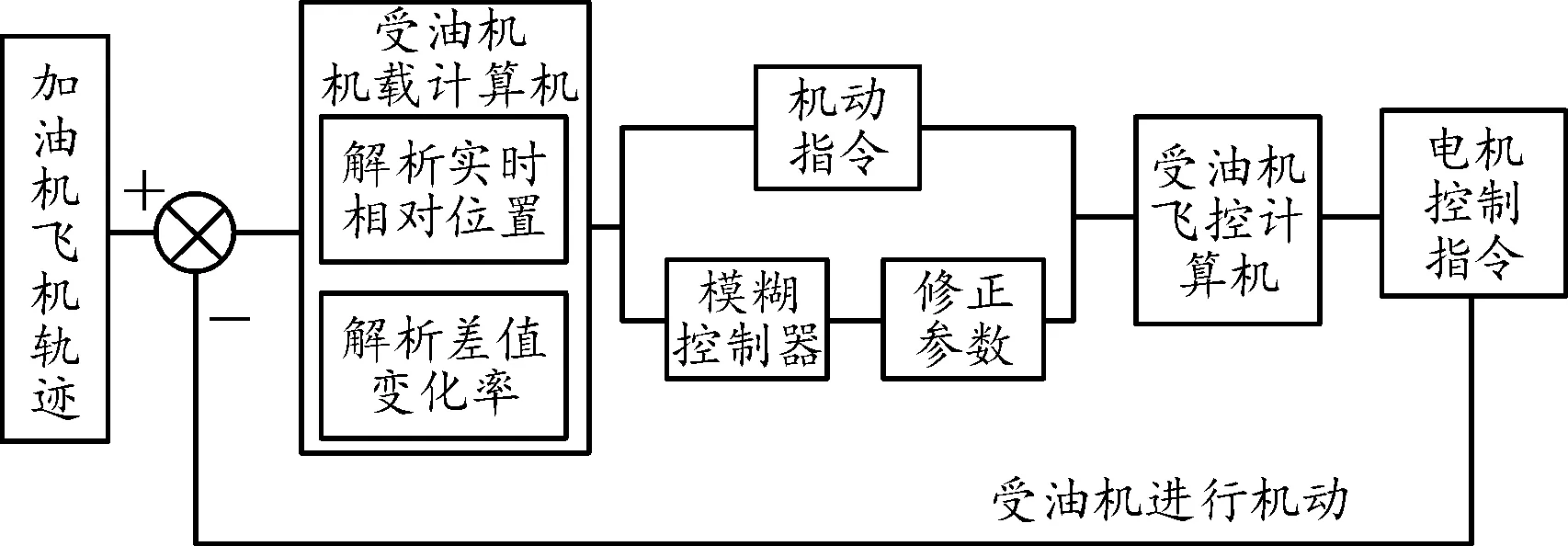
图3 无人机跟踪流程框图Fig.3 UAV trackingprinciple block diagram
在模糊控制器内部,对差值与差值变化率,将其模糊化后进行模糊规则推理,再对结果进行解模糊处理得到修正后的,,参数。如图4所示。
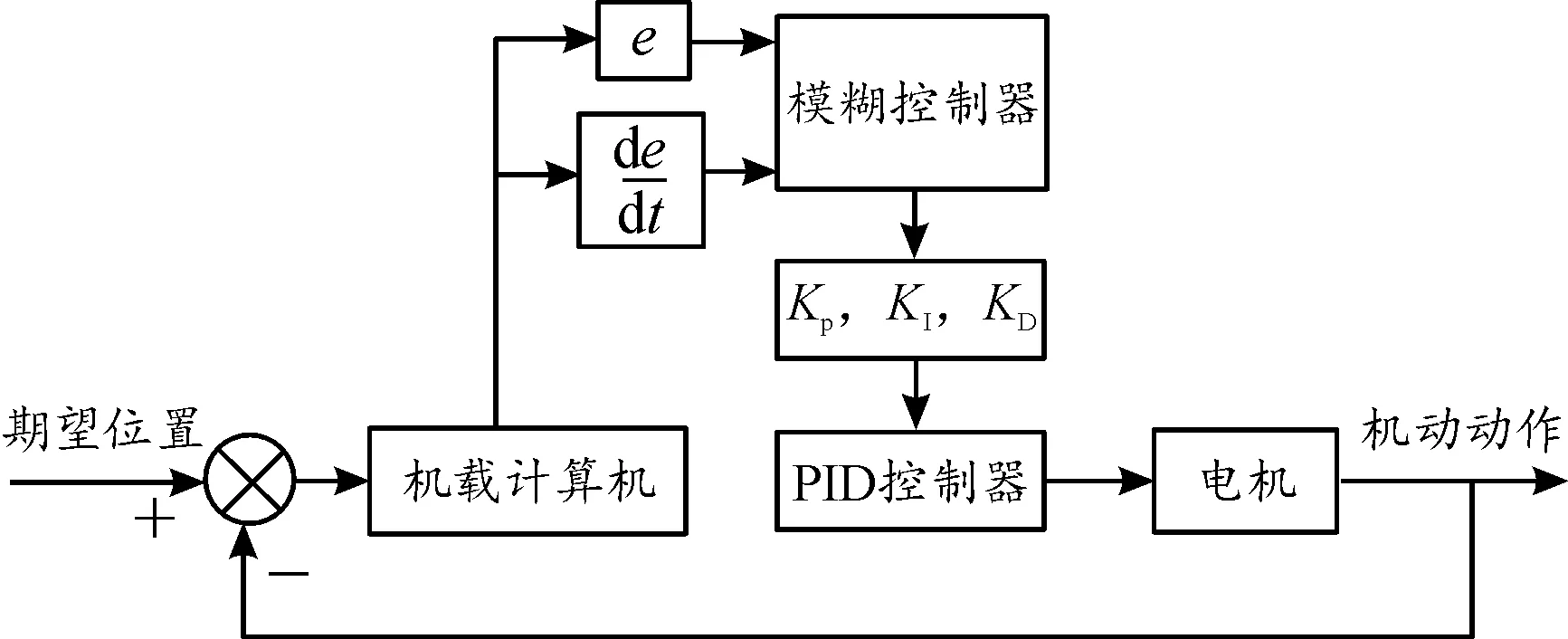
图4 模糊PID控制流程框图Fig.4 Fuzzy PID control principle block diagram
3.2 模糊PID控制器设计
1) 模糊化处理
模糊PID控制器的输入量为差值与差值变化率,输出量为修正后的、、参数,将其分为七个模糊子集域:负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)。根据无人机控制特点,采用三角隶属度函数:

(15)
式中:、表示所在隶属度函数区间的左端点值与右端点值;表示隶属度函数区间内隶属度为1时的区间值,即最大区间值。
2) 模糊规则表构建
模糊控制规则表是实现模糊控制的核心,在实际运用中大多根据专家经验设计模糊控制规则。结合PID控制中比例、积分、微分等参数意义,制定如下调整原则:
① 当期望值与实际值的差值||较大时,为使无人机快速到达对接位置,选取较大的参数;同时避免其变化率突变、积分饱和等问题,选取较小的和参数。
② 当差值||和差值变化率||为中等大小时,为了防止超调过大等问题,选取较小的,参数;同时兼顾无人机的响应速度选取合适的参数。
③ 当期望值与实际值的差值||较小时,为了无人机达到的稳定跟踪状态,选取较小的,参数;同时为了防止无人机振荡、扰动,提高其抗干扰能力,当差值变化率||较小时,选取较大的参数,当差值变化率||较大时,选取较小的参数。
结合上述3条参数调整原则,得到模糊参数调整公式:

(16)
式中:(+1),(+1),(+1)为下一状态的无人机PID参数;(),(),()为当前无人机的PID参数;Δ,Δ,Δ为经过模糊规则推理得到的PID修正参数。
Δ,Δ,Δ的模糊规则表如表1~表3所示。
3) 模糊规则推理与解模糊处理
模糊规则推理通过If-Then语句进行,每一个If-Then语句表示一个模糊推理关系,则Δ、Δ、Δ的模糊规则推理可表示为:

(17)

(18)

(19)
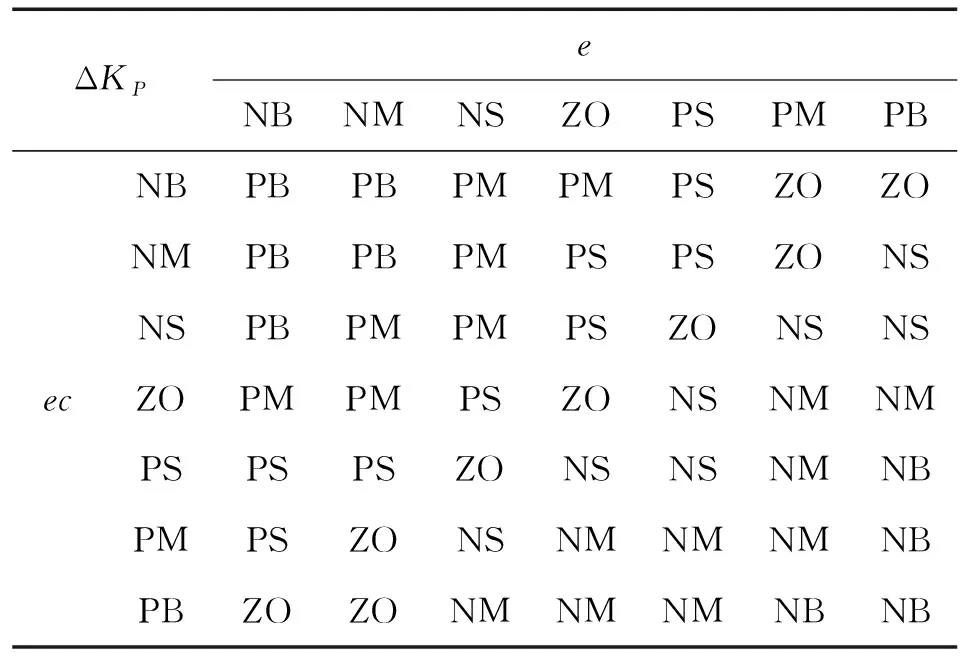
表1 ΔKP模糊规则Table 1 ΔKP fuzzy rule table
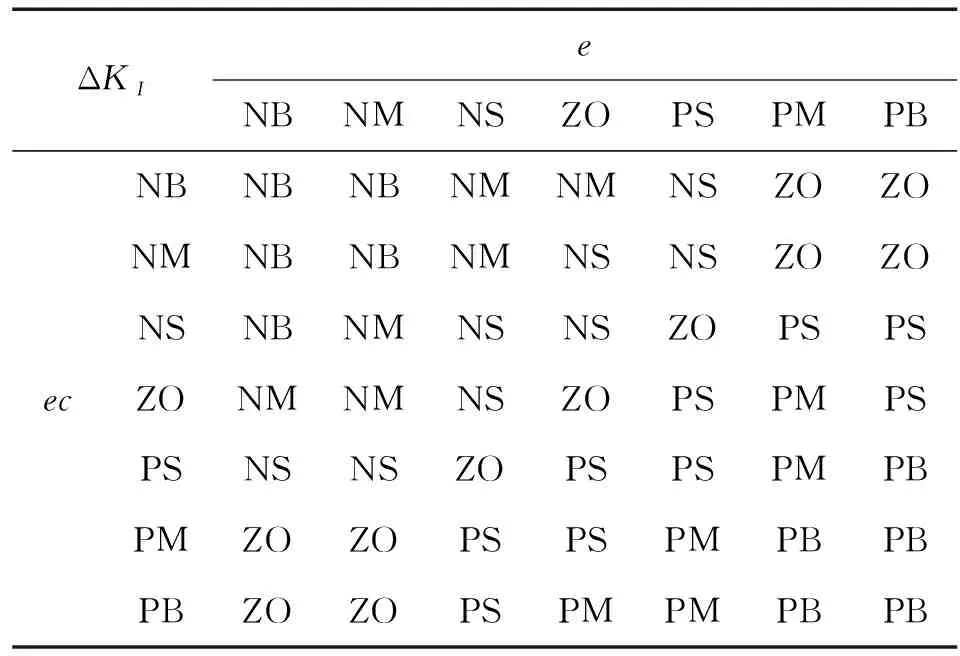
表2 ΔKI模糊规则Table 2 ΔKI fuzzy rule table

表3 ΔKD模糊规则Table 3 ΔKD fuzzy rule table
在得到模糊控制输出的模糊值后还需将其进行解模糊处理,最终得到精确的控制量。采用面积重心法进行解模糊处理:
(20)
式中: u表示输出的精确PID参数值;u表示输出的模糊值; f(u)表示模糊输出u所在模糊子集的隶属度函数。
4 无人机空中加油自主决策模型
4.1 无人机空中加油流程分析
无人机空中加油可视为编队中多个无人机单机按照既定序列与加油机进行对接加油,涉及会合、对接、加油、分离等阶段,因此在单机空中加油的基础上,不仅需要考虑无人机编队内部的飞行轨迹控制、速度控制、防相撞控制等,还需要合理优化加油策略,缩短等待时间,进而提高无人机编队加油速度。无人机空中加油流程如图5所示。

图5 无人机空中加油流程框图Fig.5 UAV aerial refueling process block diagram
1) 会合阶段。无人机编队接收空中加油指令后,飞行至指定加油空域,并调整飞行编队为空中加油对接编队。
2) 对接阶段。无人机以对接编队接近加油机至等待对接位置,根据编队内部对接序列,依次进入对接位置与加油机进行加油对接。
3) 加油阶段。无人机与加油机对接成功后,两机保持平稳飞行并开始加油,直至完成加油过程。
4) 分离阶段。加油完成后无人机断开连接,离开对接位置。其余无人机依次重复上述过程,当全部无人机完成空中加油后,无人机编队脱离加油机。
加油队列按照无人机在对接编队中的顺序进行初始化设置,当1号无人机进行加油对接时,持续更新发布当前加油队列信息,其他无人机只接收1号无人机发布的加油队列信息。当1号无人机完成空中加油后,由2号无人机更新发布加油队列信息,其余无人机接收信息。无人机的状态判断、转进在3.2节中进行说明。加油队列更新原理如图6所示。

图6 加油队列更新原理示意图Fig.6 Refueling queue update principle diagram
4.2 基于SECA的无人机空中加油自主决策规则
无人机空中加油包含多个任务剖面,需要对无人机状态多次判断、多次转进,对控制方法的灵敏性、全面性提出较高的要求。依靠传统的If-Else规则进行逻辑判断,其智能化水平较低、算法冗余度较多,不适用于灵活多变的无人机空中加油任务场景。因此,将有限状态机(finite state machine,FSM)和事件-条件-动作(event condition action, ECA)决策机制结合,基于状态-事件-条件-动作(state ECA,SECA)决策机制设计无人机对接自主决策规则。
有限状态机主要描述目标自身状态及对外界输入的状态响应,表示为:
={,,,}
(21)
式中:为状态的非空有限集合,={,,…,};为判断条件的非空有限集合,={,,…,};为执行动作的非空有限集合,={,,…,};:×→×,(,)=(,′)为状态转移函数,其意义为:当目标处于状态且满足判断条件时,系统将选择是否执行动作,是否转移至新状态′。有限状态机中存在满足判断条件转移状态但不执行动作的情况,同理也存在执行动作后不改变目标状态的情况,此类情况都需要根据具体任务场景进行判断。
有限状态机将无人机空中加油问题划分为状态决策与动作决策,状态决策是根据外部信息输入判断无人机转移至何种任务状态;动作决策是指在当前状态下根据判断条件执行何种动作。但在面对复杂任务时,其判断条件将迅速复杂化,不利于清晰表达。
事件-条件-动作决策机制是由事件驱动,根据条件判断执行动作的逻辑规则。ECA规则将判断条件拆分为事件与条件,进一步细化判断条件,根据触发的事件匹配相应的判断条件,减少规则复杂度。但ECA规则没有设定目标状态,而是将其耦合在规则内部,不利于目标具体决策。
因此,将有限状态机与ECA规则相结合,采用状态-事件-条件-动作(state ECA,SECA)规则。利用ECA规则拆解有限状态机中的判断条件,减少规则复杂度;利用有限状态机将ECA规则中的目标状态与其他内容解耦。SECA规则可表示为:
={,,,,}
(22)
式中:为事件的非空有限集合,={,,…,};:××→×,(,,)=(,′)为状态转移函数,其意义为:当目标处于状态,触发事件且满足判断条件时,系统将选择是否执行动作,是否转移至新状态′。
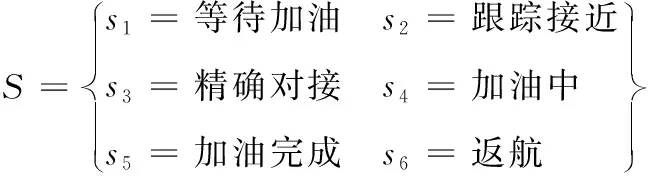
基于SECA规则,并结合无人机空中加油任务流程,将任务决策的状态集合、事件集合、条件集合和动作集合表述如下:
状态集合:
事件集合:
条件集合:
动作集合:
无人机的状态转移过程可用包含自环的有向图表示,称其为状态转移图。图7表示了无人机在空中加油流程中的状态转移,图中每个节点表示无人机的一个状态;有向边表示状态转移方向;节点自环表示执行动作不进行状态转移。

图7 无人机空中加油自主决策状态转移示意图Fig.7 UAV aerial refueling autonomous decision state transfer diagram
上述无人机空中加油自主决策规则包含6种状态,每个状态有其相对应的SECA规则,主要规则表达如下:
1) 等待加油状态自主决策规则
SECA规则:等待加油状态
State〈:等待加油〉[〈〉, 〈〉, 〈,〉, 〈,〉]
Rule1 〈等待加油规则〉
Execute Action:
End Rule
Rule2 〈跟踪接近规则〉[〈参数1:加油次序列表〉]
WHEN〈〉
IF〈〉,
THEN Execute Action:,Switch State:
End Rule
Update State
2) 跟踪接近状态自主决策规则
SECA规则:跟踪接近状态
State〈: 跟踪接近〉[〈〉, 〈〉, 〈,〉, 〈,〉]
Rule3〈持续跟踪规则〉
Execute Action:
End Rule
Rule4〈精确对接规则〉
WHEN〈〉
IF〈〉,
THEN Execute Action:,Switch State:
End Rule
Update State
3) 精确对接状态自主决策规则
SECA规则:精确对接状态
State〈: 精确对接〉[〈,,〉, 〈,〉, 〈,,〉, 〈,,,〉]
Rule5 〈持续对接规则〉
Execute Action:
End Rule
Rule6〈未进入对接范围〉

Switch State:
End Rule
Rule7〈加油规则〉
WHEN〈〉
IF〈〉,
THEN Execute Action:,Switch State:
End Rule
Rule8〈失效返航规则〉
WHEN〈〉
IF〈〉,
THEN Execute Action:,Switch State:
End Rule
Update State
4) 加油状态自主决策规则
SECA规则:加油状态
State〈: 加油中〉[〈,〉, 〈〉, 〈,〉, 〈,〉]
Rule9〈持续加油规则〉
Execute Action:
End Rule
Rule10〈对接失败〉
Switch State:
End Rule
Rule11〈加油完成规则〉
WHEN〈〉
IF〈〉,
THEN Execute Action:,SwitchState:
End Rule
Update State
5 仿真实验与结果分析
为比较传统PID控制与模糊PID控制在无人机空中加油轨迹跟踪中的性能,使用MATLAB软件进行仿真验证。仿真背景根据2021年第二届“无人争锋”智能无人机系统挑战赛中,科目四“空中自主对接”进行设置,无人机通过与加油机拖拽的模拟加油管依次对接完成空中加油任务,主要验证无人机任务规划能力、飞行控制等技术。无人机任务自主决策、轨迹跟踪、对接控制、视觉识别等方面具有较好的可移植性与通用性,可应用于实际场景;对于固定翼与四旋翼无人机的飞行控制技术,现阶段已较为成熟,不属于实际应用中的难点问题。选取四旋翼无人机作为研究平台,主要验证任务自主决策、轨迹跟踪等通用性关键技术的可行性,降低真机试飞阶段的验证难度并提高安全性。
加油机的飞行高度为550 m,飞行速度为5.5 m/s,沿直线飞行;无人机飞行高度为500 m,在加油机后方200 m的等待区内伴飞待命,利用自主决策规则与模糊PID控制进行轨迹跟踪。“无人争锋”竞赛主要验证方法可行度及方案的成熟度,同时为了保证比赛安全,条件设置可能与空中加油真实场景存在不同。仿真实验跟踪过程如图8所示。
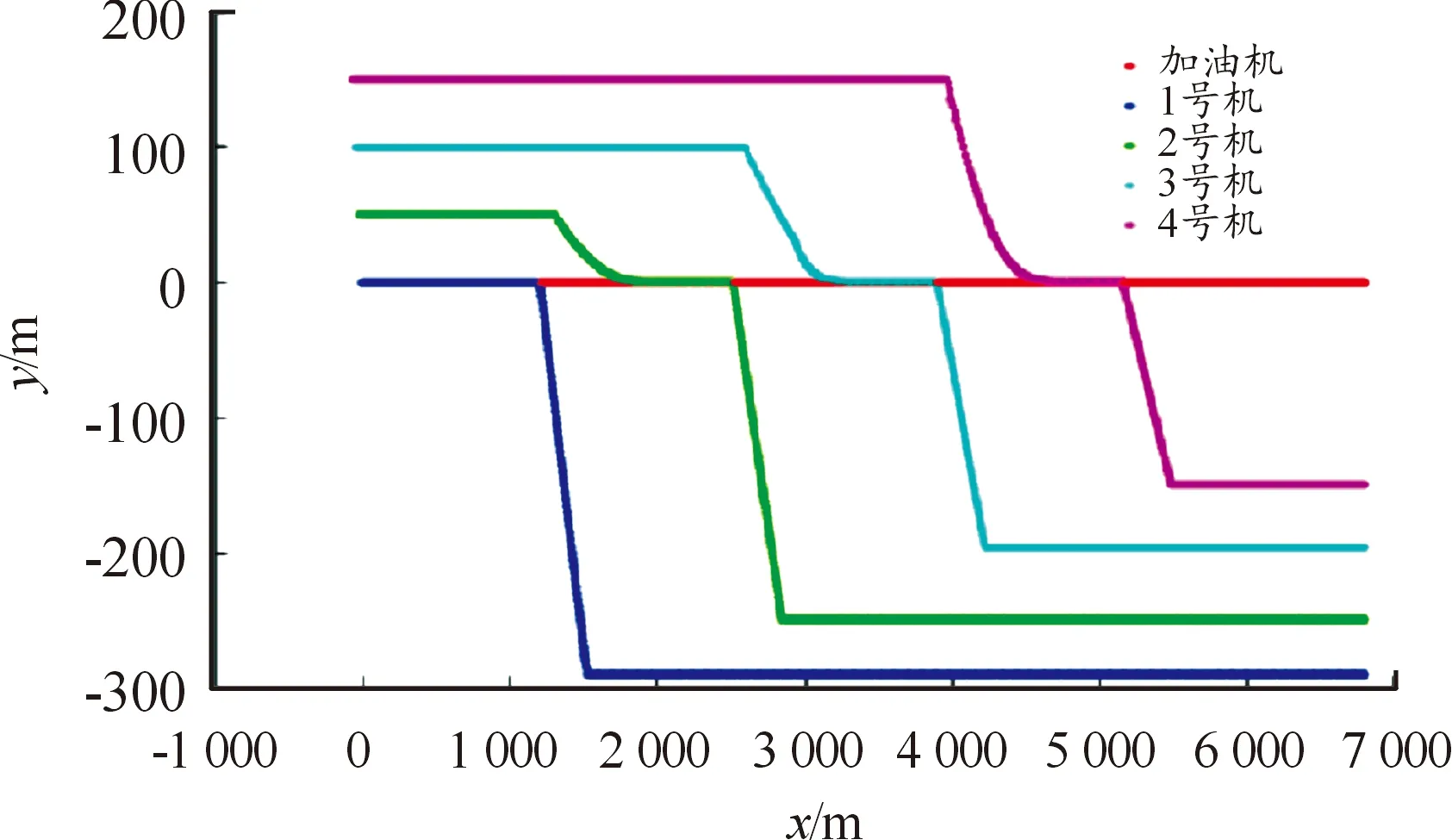
图8 空中加油仿真实验跟踪过程曲线Fig.8 Aerial refueling simulation experiment tracking process diagram
仿真实验中4架受油无人机在初始阶段以编队形式尾随加油机飞行;1号机监测到加油队列为空,则依据Rule2转入跟踪接近状态;经过约35 s的轨迹跟踪后,无人机进入精确对接位置,并依据Rule4转入精确对接状态;依据视觉引导成功对接后依据Rule7转入加油中状态;约120 s后完成加油,无人机与加油机脱离并转入状态,经过60 s飞抵安全区域等待其他无人机加油完成。其余无人机决策规则与1号机相同,各无人机在仿真实验中的状态如图9所示。
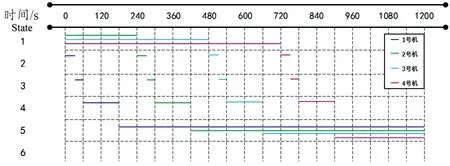
图9 无人机仿真实验状态示意图Fig.9 UAV simulation experiment state diagram
针对受油无人机从编队等待位置跟踪进入精确对接位置这一过程,分别利用模糊PID控制,传统PID控制与基础模糊控制进行仿真,在三轴位置、速度控制方面的有关结果,如表4和图10所示。

表4 模糊PID与传统PID、基础模糊控制跟踪速度、时间Table 4 Fuzzy PID with conventional PID, basic fuzzy control tracking speed interval,time comparison
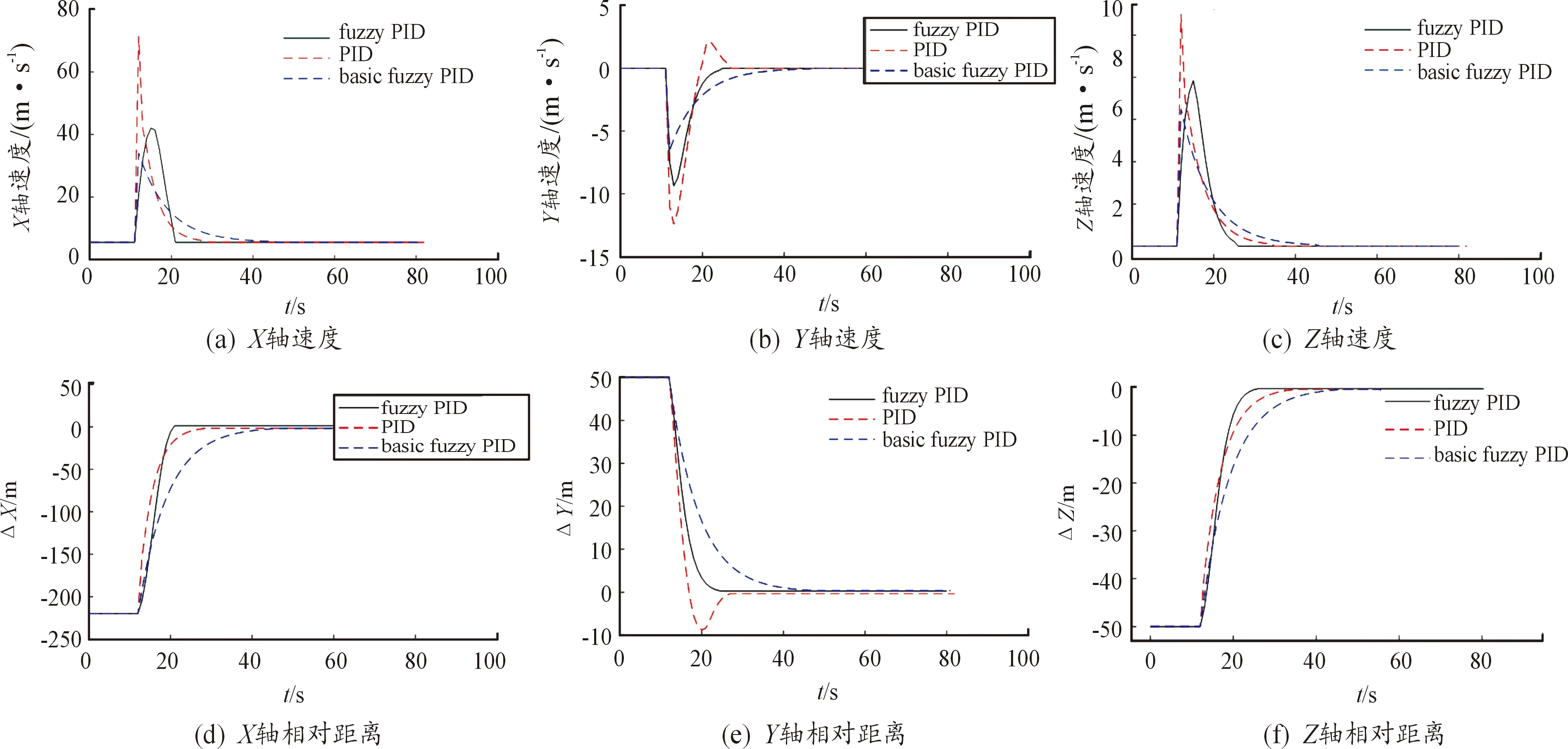
图10 模糊PID与传统PID、基础模糊控制跟踪性能曲线Fig.10 Fuzzy PID with conventional PID, basic fuzzy control tracking performance comparison curve
通过对比可以看到,对基础模糊控制根据3.2节提出3条调整原则,并根据式(16)—式(20)利用模糊规则对PID控制参数进行修正后,无人机在三轴速度控制方面,与传统PID控制相比变化率更加平滑,三轴位置跟踪有效减少超调现象;完成速度与基础模糊控制相比,可在26 s内完成跟踪,显著缩短跟踪时间。基于模糊PID的控制方法,可以使无人机在较短时间内到达期望位置,过程中可使无人机平稳飞行并保持机体稳定,提高对接效率,减少无人机空中加油时间。
6 结论
1) 基于模糊PID控制方法可以有效降低无人机超调量,快速完成跟踪任务,同时保持飞行稳定,缩短无人机空中加油总体时间,提高无人机任务效能。
2) 基于SECA规则的无人机空中加油自主决策规则明确无人机状态判定、转进逻辑,限制无人机不同状态下的动作空间,规范了无人机自主空中加油流程,为无人化、智能化作战提供一种可行的方法。
3) 无人自主系统智能决策将不同任务阶段进行状态、事件、条件、动作解构,分析相应的动作空间与转进逻辑,可为无人机空中加油技术提供理论支撑。在已有的研究基础上,将进一步扩展SECA规则适用性,面对更加复杂的任务,验证规则的完备性。
猜你喜欢
文萃报·周五版(2021年33期)2021-09-12
文萃报·周二版(2021年5期)2021-03-02
兵器知识(2018年4期)2018-04-18
高中时代(2017年7期)2018-02-24
南方农业·下旬(2017年8期)2017-10-23
航空世界(2014年7期)2014-09-24
科技与创新(2014年8期)2014-07-17
活力(2009年15期)2009-06-17