变体飞行器执行器故障在线主动容错控制方法
2022-11-01 10:55蔡光斌毛定坤冯志超周志杰
兵器装备工程学报 2022年10期
蔡光斌,毛定坤,冯志超,周志杰
(火箭军工程大学 导弹工程学院, 西安 710025)
1 引言
变体飞行器是通过改变外形以改善自身的气动特性,进而改变其动力学特性、运动状态、运行轨迹等一类特殊飞行器。与传统飞行器相比,变体飞行器具有改善气动特性、提高操纵能力、实现多功能多任务需求和减少飞行消耗等优点,是当前航空航天领域研究热点之一。变体飞行器的飞行环境较为复杂,执行器作为变体飞行器的重要组成部分,一旦发生故障,会极大程度地影响飞行性能,难以实现预期的飞行任务。此外,由于变体飞行器具有强非线性、强耦合、快时变、强不确定性等特性,且在飞行过程中需要改变外形,增加了故障发生的可能性与容错控制的难度。因此,开展针对执行器故障的容错控制问题研究具有极强的理论意义和应用价值。文献[11-14]研究了基于控制分配的异步切换容错控制方法,获得了良好的控制效果。文献[15-17]分别采用布谷鸟算法、遗传算法和粒子群算法,将其控制分配问题转化为整数规划问题,从而实现变体飞行器的稳定控制。
然而,变体飞行器模型准确与否直接关系到容错控制效果,建立精确的数学模型难度较高且成本较大,并且能够开展的实验有限,不能获取足够的监测数据,包括一些故障样本。能够在线的实时监测数据的专家系统可以解决这一难题,但是变体飞行器控制系统各个子系统之间高度耦合,所提供的专家知识具有很强的不确定性,导致准确的专家系统无法建立,专家知识也无法直接使用。置信规则库(belief rule base,BRB)作为专家系统的一种,是在模糊理论、IF-THEN规则、证据理论等基础上发展而来的,BRB中系统的输入和输出之间的非线性关系通过规则来表示,其最大优势在于能够将专家知识和监测数据进行深度融合,提高了小样本情况下的建模精度,增加了变体飞行器模型的准确性。
因此,本文中针对变体飞行器执行器故障诊断和容错控制过程中存在的系统复杂、高价值样本缺失、外界干扰等问题,在文献[14]的基础上,设计基于BRB专家系统的执行器故障诊断和容错控制框架。首先,分析变体飞行器的气动参数模型,利用雅克比线性化方法对飞行器纵向周期非线性动力学方程进行线性化处理,并综合考虑外部干扰和执行器故障,建立变体飞行器切换线性变参数(linear parameter varying,LPV)故障模型。其次,针对LPV故障模型,构建基于BRB专家系统故障诊断模型,引入证据推理(evidential reasoning,ER)算法对BRB专家系统置信规则进行融合,以保证对融合中不确定性的合理处理。然后,构建容错控制模型,根据执行器不同的故障程度,结合故障诊断结果,选择合适的容错控制策略。而后,利用基于投影算子的协方差矩阵自适应优化策略(projection covariance matrix adaption evolution strategy,P-CMA-ES)对变体飞行器的故障诊断和容错控制模型进行优化处理,降低模型复杂性,提高模型参数优化能力。最后,通过MATLAB仿真验证该方法的有效性,提高了变体飞行器的容错控制能力和稳定飞行性能。
2 变体飞行器切换LPV纵向模型
本文中以美国NextGen公司研发的一款变后掠翼飞行器“Fire-bee”为研究对象,变体飞行器构型示意图如图1。后掠角变化范围为[15°,60°]。方便起见,用后掠角变形率描述后掠角的变化,定义如下:
(1)
式中:为实时后掠角;为最小后掠角;为后掠角变形率,取值范围为[0,3]。
变体飞行器纵向周期非线性动力学表达式为:

(2)
式中:为飞行速度;为高度;为马赫数;为重力加速度;、、分别为变体飞行器总质量、机翼质量和配重质量;、分别为机翼质心位置和配重质心位置;、分别为升力系数和俯仰力矩系数;、、分别为攻角、俯仰角和舵偏角;为俯仰角速率;为机翼面积;为动压;为绕轴的转动惯量;为平均气动弦长。
图1 变体飞行器构型示意图Fig.1 Configuration diagram of morphing aircraft
利用DATCOM软件计算出不同状态下的气动参数,并通过拟合得到如下表达式:

(3)
式中:和0分别为零攻角时的升力系数和俯仰力矩系数;1和分别为升力系数和俯仰力矩系数关于攻角的气动导数;1和分别为升力系数和俯仰力矩系数关于舵偏角的气动导数;是与俯仰角速率有关的系数。
假设飞行器在高度=12 500 m、马赫数=055平飞,得到变后掠翼飞行器各气动参数的具体表达式如下:
(4)
针对变体飞行器的纵向周期非线性运动方程(2),通过雅克比线性化方法,推导出变体飞行器的小扰动线性化模型为:
(5)
利用离散化方法,得到变体飞行器的切换LPV系统模型为:

(6)
不失一般性,假设(()),())可控,∈,={1,2,…,}为切换信号,为变体飞行器的子系统个数,且满足

(7)

(8)
(9)
变体飞行器在飞行过程中,极易发生执行器故障,严重影响飞行性能。变体飞行器的执行器故障主要表现为效率损失故障和随机漂移故障。
执行器的效率损失故障表示执行机构效率降低,从而不能完全实现预期的控制效果。系统控制输入可以表示为:

(10)
其中:为效率损失系数,且有0≤≤1。当=1时表示执行器完全失效,当=0时表示执行器完好,可以正常工作。()为有故障的控制输入;()为期望的控制输入,也就是无故障时的控制输入,为变体飞行器的飞行时间,为效率损失故障发生的时刻。变体飞行器的LPV多胞体离散化模型为:

(11)
随机漂移故障是指执行器的任意移动,它相当于控制输入的一个附加时变项,可以表示为:
()=()+Δ(),≥
(12)
式中:()为有故障的控制输入;Δ()表示随机漂移故障。由此可以得到考虑执行器随机漂移故障的LPV多胞体离散化系统模型为:

(13)
将式(13)进一步改写为:

(14)
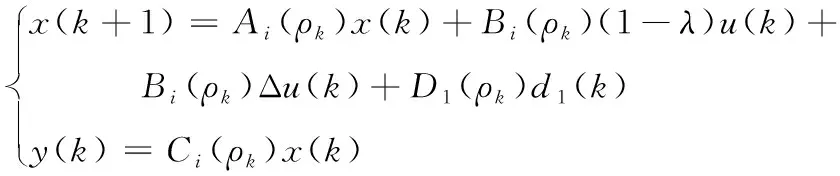
同时再考虑到外界未知干扰,令向量()表示外界干扰向量,则可以得到考虑干扰的LPV多胞体离散化系统模型为:

(15)
可以看出,外界未知干扰和执行器随机漂移故障都是加性故障,而效率损失故障为乘性故障,所以可以得到如下表达式:
(16)
将外部未知干扰和执行器随机漂移故障看成变体飞行器系统模型的不确定性问题,即:
()()=()Δ()+()()
(17)
将式(17)代入式(16)中,得到综合考虑执行器效率损失故障、执行器随机漂移故障和外界未知干扰的LPV故障模型为:

(18)

3 基于BRB故障诊断和容错控制模型构建
变体飞行器在飞行过程中,其控制信号为变体飞行器的升降舵偏角,执行器为升降舵。当变体飞行器的执行器同时发生效率损失故障和随机漂移故障时,为保证飞行过程中的稳定性和可靠性,构建基于BRB专家系统的故障诊断和容错控制模型,实现飞行器的稳定飞行控制,提高系统的容错控制能力和鲁棒性能。
变体飞行器的故障诊断和容错控制模型主要包括基于BRB专家系统的故障诊断模型和容错控制模型,变体飞行器的故障诊断和容错控制模型结构框图如图2。
基于BRB专家系统的故障诊断模型,根据变体飞行器切换LPV故障模型的控制输出,得到故障诊断结果。容错控制模型根据故障诊断结果,选择不同的容错控制方法:保持原有控制律、控制矩阵自适应重构策略、切换备份执行器,从而实现飞行器的稳定飞行控制。

图2 变体飞行器故障诊断和容错控制模型结构框图Fig.2 Fault diagnosis and fault tolerant control model structure diagram of morphing aircraft
3.1 故障诊断模型构建
由于变体飞行器LPV模型中存在外部未知干扰、气动参数误差以及飞行器变形可能产生的附加力和附加力矩等问题,从而降低了故障诊断的精确性。因此,基于BRB方法建立了故障诊断模型,得到故障评估结果,以提高故障诊断的精度。在基于BRB的执行器故障诊断模型中,其输入为变体飞行器的输出(),输出结果为执行器的故障类型。
首先,计算执行器监测指标()相对于每条规则的匹配度,将监测数据转化成统一的度量框架中,如下式所示:
(19)

其次,每条规则拥有多个监测指标,监测指标相对于第条规则的整体匹配度可以通过下式求得:

(20)
(21)

当第条规则激活时,可以求得监测指标相对于规则的激活权重:
(22)
其中:为第条规则的激活权重;为第条规则的规则权重且有0≤≤1,表示各个监测指标相对重要程度。
然后,采用ER解析算法,对已知各规则权重的条规则进行融合,得到各个参考等级的置信度。ER解析算法的表达式为:

(23)
(24)
其中,为故障诊断模型输出结果中第个参考等级的置信度。
再之,通过设置标准故障向量,对比故障诊断模型输出结果与标准故障向量之间的最短距离,确定执行器所发生的故障。
当发生故障时,设置标准故障矩阵为:
(25)

(26)
式中,为故障诊断模型输出向量与标准故障输出向量之间的距离,表示故障诊断值与实际输出值之间的误差。
最后,通过式(27)确定当前时刻执行器故障:
=min()
(27)
其中,为当前时刻执行器的故障状态,即为基于BRB专家系统的故障诊断结果。
3.2 容错控制模型构建
在获得执行器的故障诊断结果后,需要根据故障程度选择合适的容错控制策略,具体方法如下:
1) 对于执行器的正常状态,不需要采取容错控制策略,继续采用初始控制方法。

在执行器控制律重构模型中有条规则,第条规则表示如下:

(28)
(29)

3) 对于执行器的重度故障,即故障程度较高时,受控制器控制能力限制,无法通过重构控制矩阵对其进行调整,需要切换备份执行器以保证系统稳定性。
3.3 基于BRB故障诊断和容错控制优化模型构建
在构建执行器容错控制框架时,基于BRB的初始参数由专家系统给定。由于专家知识的不确定性,导致初始模型达不到最佳性能。因此,本文中选取P-CMA-ES作为模型优化算法,结合历史数据和在线获取的监测数据对模型参数进行优化,用于处理BRB专家系统所使用的专家知识中包含的模糊性和不确定性,其迭代次数由专家系统模型参数大小、训练数据量和精度要求等决定。通常情况下,P-CMA-ES算法在所获的历史数据中,一方面,选取部分数据作为训练数据,用于模型的优化;另一方面,将剩余数据作为测试数据,用于测试优化模型性能。
针对基于BRB的故障诊断和容错控制模型,优化目标可分为2个:故障诊断的准确度和信息重构的精度。因此,在参数优化过程中,要使故障诊断模型输出结果与执行器故障状态的误差最小化。
建立如下的目标函数如下:

(30)

(31)
其中:为故障诊断的准确度;为信息重构的均方误差,是衡量模型精度的重要指标;为输出数据个数;为诊断准确个数;output()为重构控制矩阵,由式(29)求得,output()为变体飞行器能够达到正常状态的控制矩阵,由专家系统综合变体飞行器监测指标给定。
故障诊断模型参数优化模型需要遵循以下约束条件:
0≤≤1,=1,2,…,
(32)
0≤,≤1,=1,…,,=1,2,…,
(33)
(34)
0≤≤1,=1,…,
(35)
可以看出,优化参数包括规则权重、规则输出结果置信度,和指标权重。在基于BRB的执行器故障诊断和控制矩阵重构模型中,模型参数的约束可以不同,具体根据所面向的系统进行设计。
4 仿真结果及分析
为了验证所提方法的有效性,以变体飞行器“Fire-bee”为研究对象,针对其在变形过程中的执行器故障诊断和容错控制问题开展仿真验证。利用文献[14]中控制器设计的方法,得到3个子系统次优控制器的增益矩阵如下:

(36)

(37)

(38)
后掠角变化策略已预先设定,变体飞行器后掠角调参变量随时间的变化关系为:
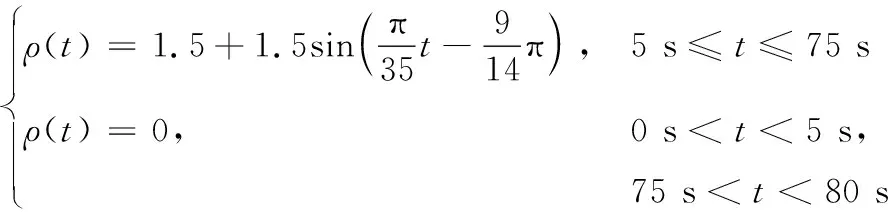
(39)
对比划分的3个子系统,可以得到控制器的切换时间分别为20.26 s、28.77 s、51.23 s、59.74 s。
通过平衡点选取和插值拟合方法,得到变体飞行器LPV系统矩阵为:

(40)

(41)

基于BRB的执行器故障诊断模型,结合所获取的监测数据(),得到变体飞行器控制输出()的参考等级和参考值如表1所示。其中控制输出分为5个参考等级,分别为控制输出值低(L)、稍低(SL)、中等(M)、稍高(SH)、高(H)。执行器工作状态参考等级和参考值如表2所示,其中分为5个参考等级,分别为执行器正常(N)、轻度故障(LF)、中度故障(MF)、重度故障(SF)和完全故障(A)。参考等级的个数决定所构建模型的复杂度,参考值的大小决定模型精度的高低。

表1 控制输出参考等级和参考值Table 1 Reference levels and referencevalues of control output

表2 执行器工作状态参考等级和参考值Table 2 Reference levels and reference values of actuatorworking state
假设控制输出的2个参数同等重要,即指标权重=1,根据BRB模型中规则的构造方式,对于执行器故障的5个状态、2个输出,控制矩阵重构模型中共产生了25条置信规则,得到初始变体飞行器执行器故障诊断模型输出结果如表3所示。
在容错控制模型中,根据变体飞行器执行器不同故障类型,采取以下容错控制策略:
当执行器不发生故障时,保持原有控制律;当执行器发生轻度故障或中度故障时,重构控制矩阵;当执行器发生重度故障或失效时,切换备份执行器,从而实现飞行器的稳定飞行控制,提高系统的容错控制能力和鲁棒性能。变体飞行器执行器故障程度参考等级和参考值如表4所示,其中TD、LD、MD、BD和SD分别表示微小故障、轻度故障、中度故障、较大故障、重度故障。重构控制矩阵参考等级和参考值如表5所示,其中参考等级分为低(L)、稍低(SL)、中等(M)、稍高(SH)、高(H)。
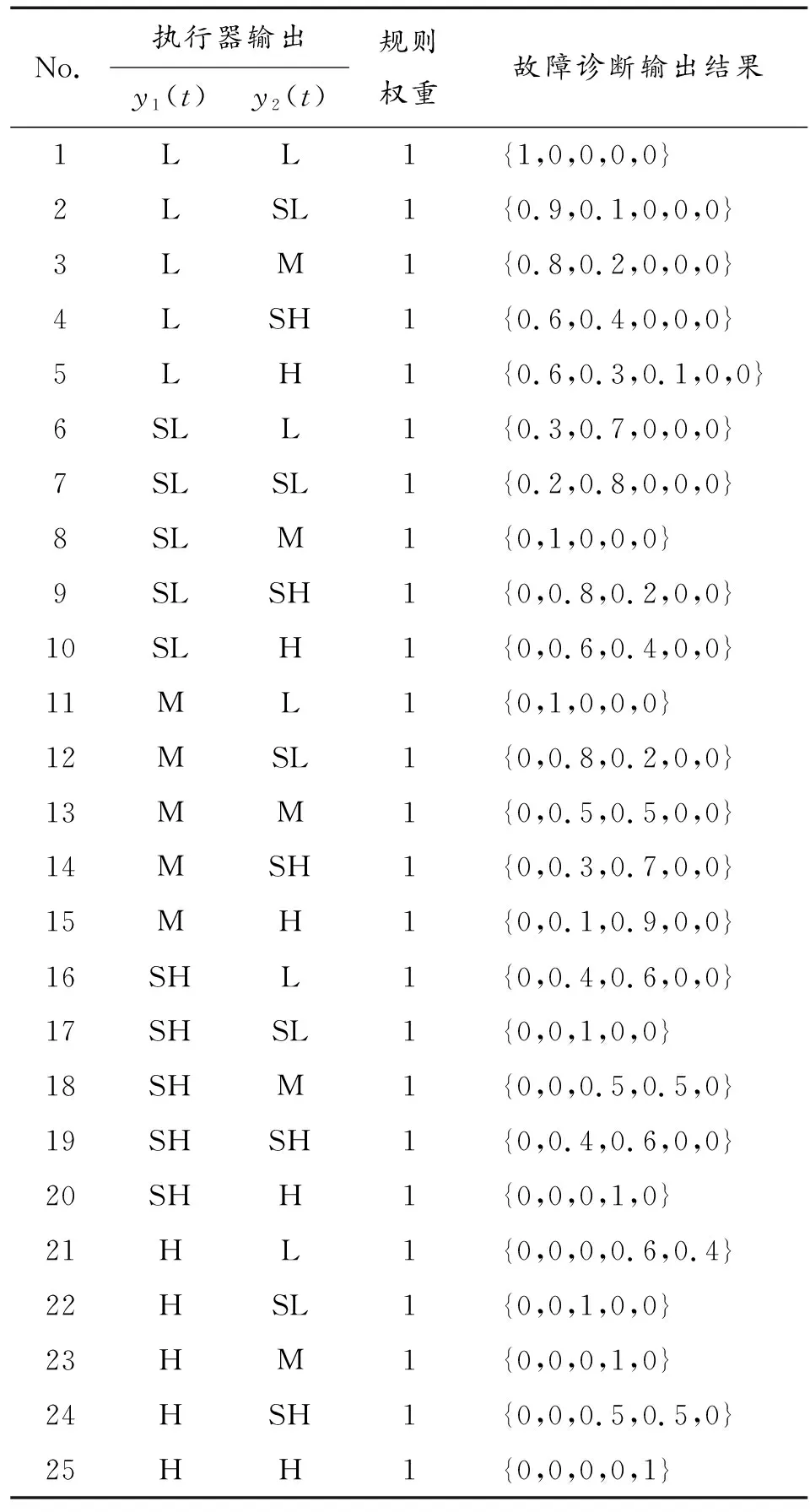
表3 初始变体飞行器执行器故障诊断模型输出结果Table 3 Fault diagnosis model for actuator of initial morphingaircraft
假设执行器故障模型的控制输出的2个参数()和()同等重要。根据BRB规则的构造方式,对于控制矩阵的5个参考等级和对应2个控制输出状态的故障向量,共产生了25条置信规则。根据规则中输出结果的置信度,构建了初始控制矩阵重构模型,如表6所示,得到变体飞行器执行器正常工作时的控制效果如图3所示。

表4 执行器故障程度参考等级和参考值Table 4 Reference levels and referencevalues of actuator fault degree

表5 重构控制矩阵参考等级和参考值Table 5 Referencelevels and referencevalues of refactoring control matrix
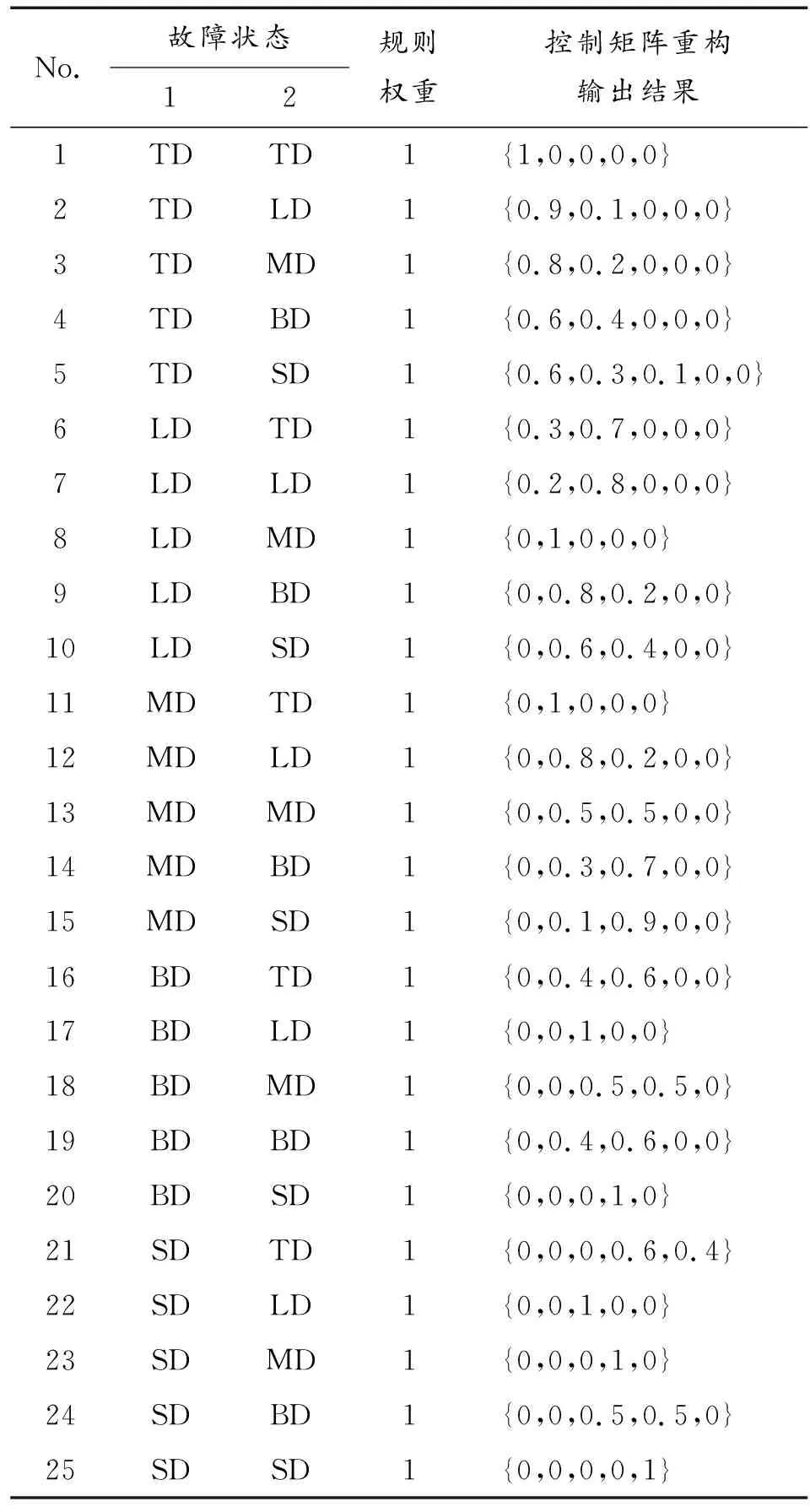
表6 初始变体飞行器控制矩阵重构模型Table 6 Controlmatrix reconstruction model of initial morphing aircraft
为了降低专家知识不确定性对初始模型效果的影响,基于历史获取的监测信息对故障诊断和容错控制模型开展训练。实验过程中共获取800组监测数据。在训练过程中,随机选取400组数据作为训练数据,剩余400组数据作为测试数据。同时,设置不同程度的故障,从执行器完好状态到完全故障状态,即故障程度在0~1之间变化。通过仿真实验确定不同程度执行器故障的容错控制能力,寻找区分轻度故障状态、中度故障状态和重度故障状态的分界点。此外,由于在实际飞行过程中,系统存在外界干扰。因此,在变体飞行器切换LPV故障模型中考虑外干扰,并验证不同故障程度下容错控制方法的有效性。
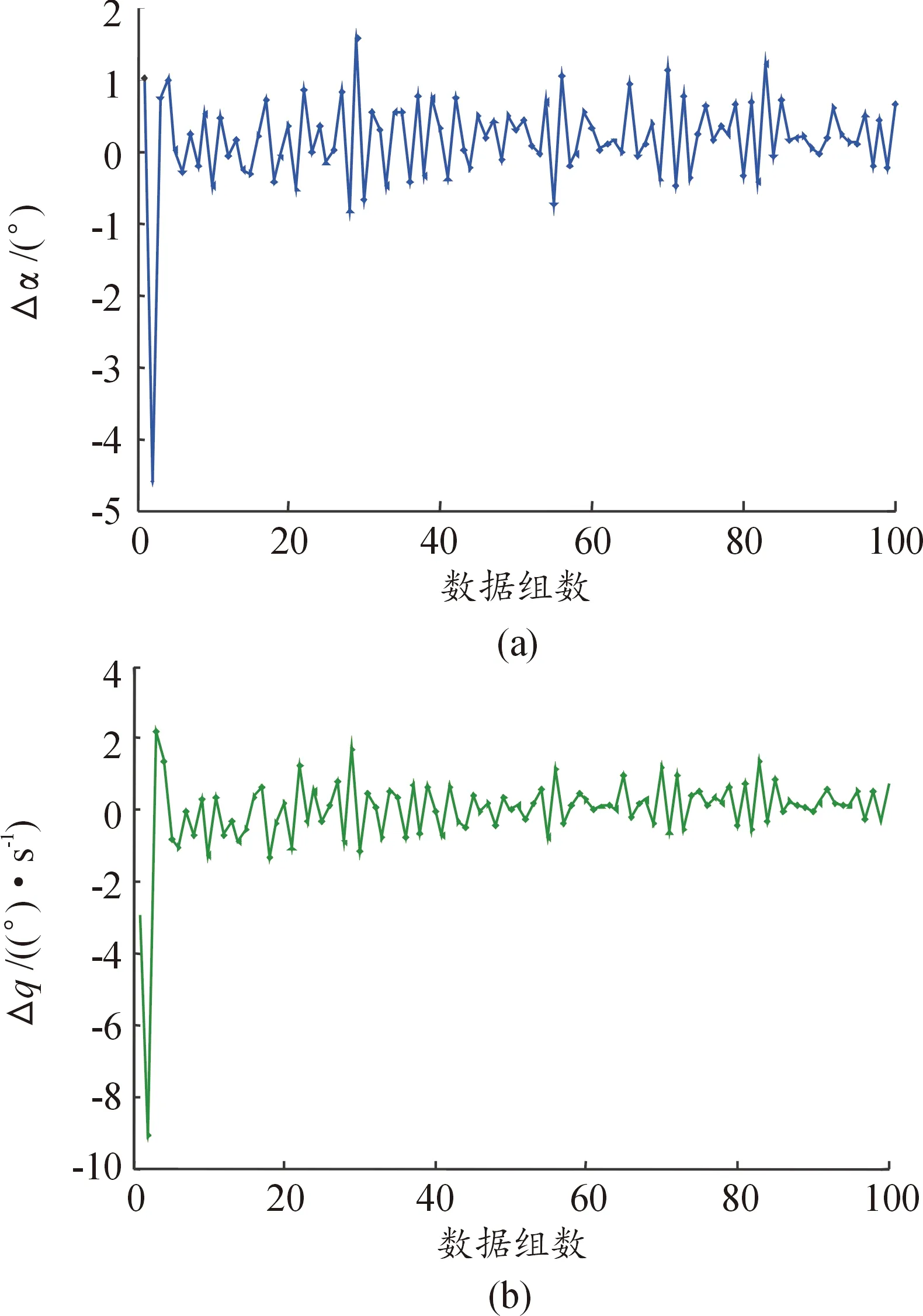
图3 变体飞行器执行器正常状态下控制效果曲线Fig.3 Control effect of variable aircraft actuator in normal state
在故障诊断环节,设置变体飞行器的执行器故障率分别为0、30%、70%和90%四种状态。采用P-CMA-ES算法对参数进行优化,综合考虑模型参数数量、训练数据数量,设置优化模型的训练迭代次数为200次。经过训练后,得到优化后的变体飞行器执行器故障诊断模型输出结果如表7所示,控制矩阵重构模型输出结果如表8所示,故障诊断结果如图4所示,模型输出结果的MSE均值为0.038 5。可以看出,经过优化后的执行器故障诊断模型能够较为准确地对执行器机构进行故障诊断,能够精确区分飞行器执行器故障状态。仿真实验重复进行50次,得到MSE均值为0.061 9,方差为2.046 7。MSE均值和方差均较小,表明所构建的故障诊断和容错控制模型较为准确。
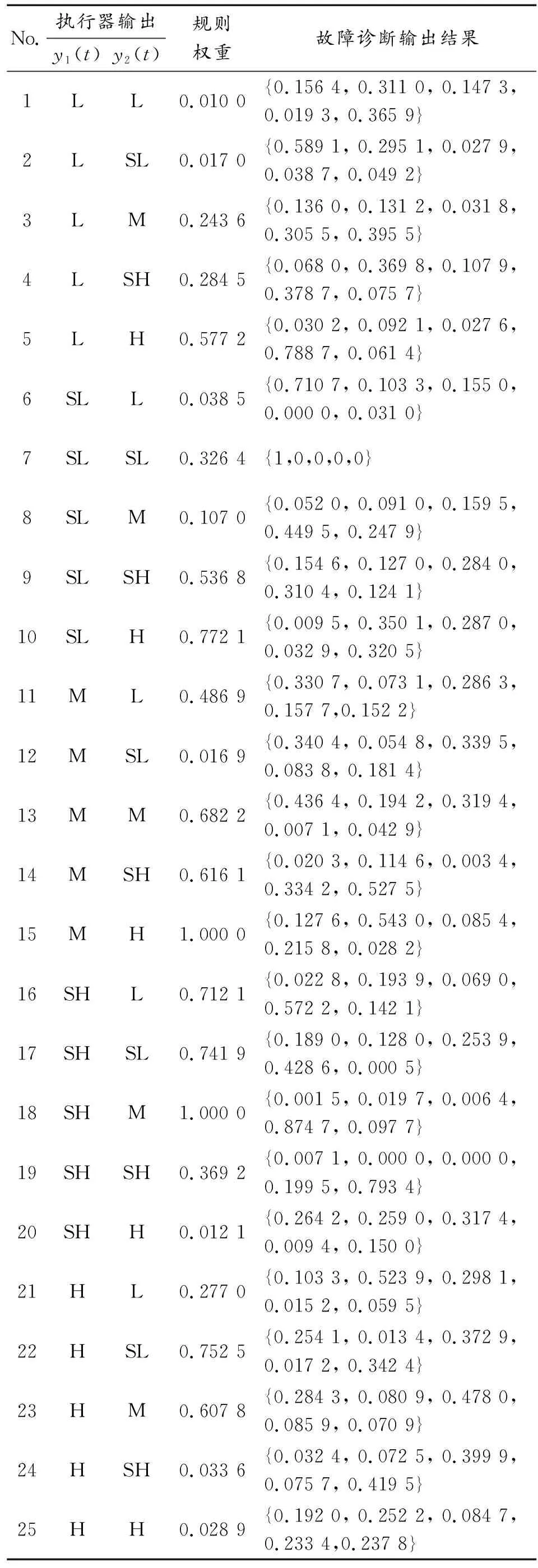
表7 优化后的变体飞行器故障诊断模型输出结果Table 7 Optimized fault diagnosis model for morphing aircraft
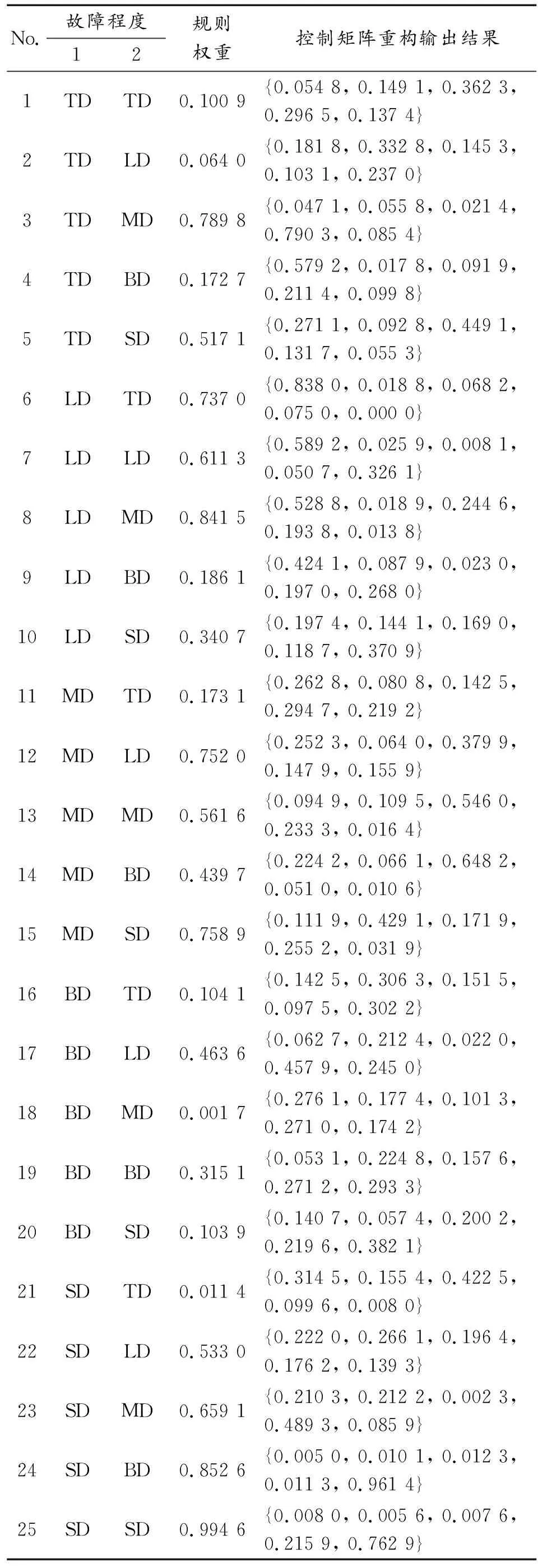
表8 优化后的控制矩阵重构模型输出结果Table 8 Optimized control matrix reconstruction model

图4 变体飞行器执行器故障诊断模型输出结果图Fig.4 Output results of actuator fault diagnosis model for morphing aircraft
基于故障诊断结果,对执行器故障进行容错控制。将执行器的故障程度分别设置为10%、20%、30%、40%、50%,在第20 s开始加入执行器故障,为提高仿真实验的准确度,针对每种故障程度重复实验200次,通过不同程度故障下的容错控制效果,以判断所构建的容错控制模型对执行器故障的容错控制效果。
不同执行器故障程度的容错控制效果如图5—图9所示,当执行器故障程度为≤40%时,控制效果良好,能够实现飞行器稳定飞行控制。当执行器故障程度≥50%时,飞行器失稳,需要切换备份执行器,以实现飞行器的容错控制。

图5 变体飞行器执行器10%故障下容错控制效果曲线Fig.5Faulttolerant control effect curve of morphing aircraft under actuator fault of 10%
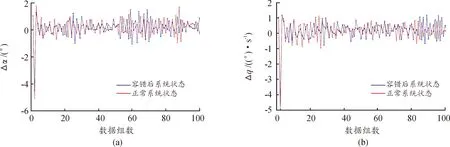
图6 变体飞行器执行器20%故障下容错控制效果曲线Fig.6 Faulttolerant control effect curve of morphing aircraft under actuator fault of 20%
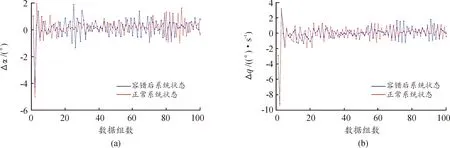
图7 变体飞行器执行器30%故障下容错控制效果曲线Fig.7 Faulttolerant control effect curve of morphing aircraft under actuator fault of 30%
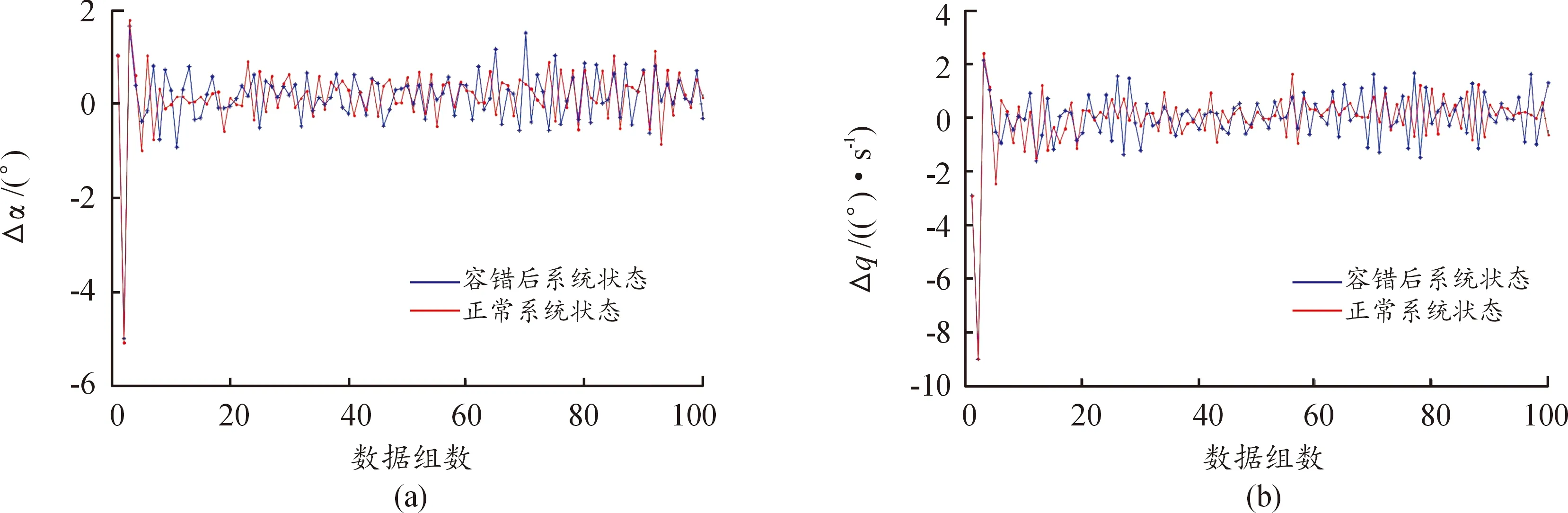
图8 变体飞行器执行器40%故障下容错控制效果曲线Fig.8 Faulttolerant control effect curve of morphing aircraft under actuator fault of 40%
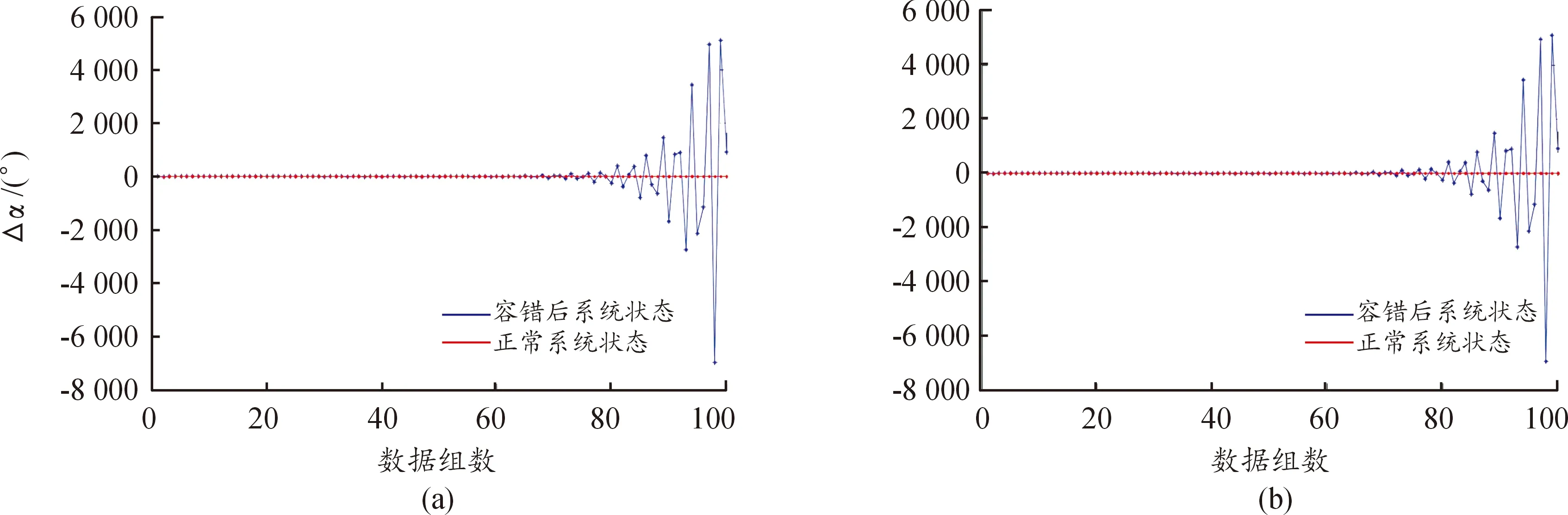
图9 变体飞行器执行器50%故障下容错控制效果曲线Fig.9 Faulttolerant control effect curve of morphing aircraft under actuator fault of 50%
由仿真结果可知:当执行器正常或故障程度较小时,可以通过LPV控制器自身的鲁棒性进行调节,不需要对其采取容错控制措施。对于在容错控制范围内的执行器故障,采用控制矩阵重构方法,可克服执行器故障,达到容错控制效果。当故障程度较大,容错控制方法无法实现有效控制,需要切换备份执行器,以保证变体飞行器的稳定飞行性能。与文献[14]中的控制方法相比,该方法具有更强的鲁棒性能和容错控制能力。
5 结论
针对变体飞行器飞行过程中存在的执行器故障问题,以变后掠翼飞行器模型为研究对象,建立了切换LPV故障模型,设计了一种基于BRB专家系统的故障诊断和容错控制方法。主要结论如下:
1) 构建基于BRB专家系统的故障诊断和容错控制框架,引入ER方法,利用P-CMA-ES算法优化故障诊断和容错控制模型,提高了故障诊断准确度和信息重构精度。
2) 变体飞行器的执行器发生故障时,所提方法仍能使变体飞行器稳定飞行,具有良好的容错控制能力和鲁棒性能。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
电脑报(2022年11期)2022-06-14
文萃报·周二版(2022年11期)2022-03-23
科技风(2021年10期)2021-04-18
科学导报·科学工程与电力(2019年44期)2019-09-10
环球时报(2018-11-30)2018-11-30
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
智富时代(2018年10期)2018-01-30
智富时代(2018年10期)2018-01-30