基于变结构的鱼雷垂直命中导引律设计
2022-11-01 10:55张西勇
兵器装备工程学报 2022年10期
张西勇
(武汉东湖学院 机电工程学院, 武汉 430033)
1 引言
传统鱼雷导引设计主要是以提前角导引律为主,通过射击三角形的几何关系设计鱼雷航向来达到导引目的。这种导引设计方法的命中精度在很大程度上依赖于目标信息测量参数的准确性,而且需要舰船处于合理攻击方位,在战机稍纵即逝的战场环境中,存在很大局限性和被动性。在攻击水面舰艇和潜艇时,需要对目标进行垂直命中攻击,这样可以造成敌舰最大程度的损毁。从国内外收集的文献可知,国内外鱼雷在垂直命中领域基本还是采用射击三角形的原理设计鱼雷的航向角,以达到垂直命中的目的,这种方法过于依赖目标信息参数测量的准确性,可以说是失之毫厘谬以千里,而且还是在目标不作机动的情况下才有效,当目标作机动时,连命中都成问题,更谈不上垂直命中。文献[1]应用变结构控制理论设计了反鱼雷鱼雷水平面拦截导引律。文献[2-3]应用变结构控制理论设计了机动目标拦截的变结构制导律,文中弹目相对运动关系是建立在弹目加速度基础上的,而鱼雷很难进行加速度的精确控制。文献[4]设计了无人机垂直命中导引律。论文针对传统鱼雷导引律不能垂直命中的问题,提出了基于变结构控制的鱼雷垂直命中导引方法,根据鱼雷与目标舰船运动关系模型,推导了鱼雷与目标舰船视线角状态方程,应用变结构控制理论设计控制器,使得鱼雷与目标舰船视线和目标舰船航向之间的夹角控制在45°角,以确保鱼雷垂直命中目标舰船。由于控制器采用变结构控制进行设计的,对目标参数信息测量误差和目标机动具有强鲁棒性,确保鱼雷稳定地以垂直命中的方式攻击目标舰船,而不受目标信息测量误差影响,并能够准确命中非机动目标和机动目标。
2 数学模型
在平面内,鱼雷-目标舰船相对运动关系如图1 所示。由图1可以导出如下关系式:

(1)

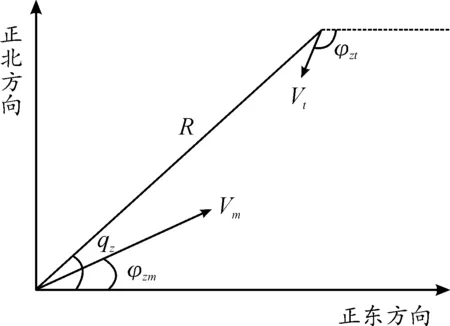
图1 鱼雷-目标舰船相对运动关系曲线Fig.1 Torpedo-target warship relative motion geometry




(2)


(3)
令:

(4)

(5)

(6)

(7)
把式(4)~式(7)代入式(2)和式(3),并注意到式(1),得到

(8)

(9)


(10)
式(10)即为鱼雷与目标相对运动时视线角变化的数学模型。
3 导引律设计


(11)
式中:为控制量;为干扰量。
基于导引律的控制目的,选取切换平面为
=·(-((0)-π4-π)+
(12)
其中:为正常数;(0)为目标舰船初始航向角。由于>0,显然在滑模面=0上,视线角是稳定地趋于(0)-π4-π的,即系统是自稳定的,由此可以保证视线角与目标舰船航向成45°夹角,当鱼雷与目标舰船航速相当时,鱼雷与目标舰船成垂直角度相遇;当鱼雷与目标舰船航速相差较大时,根据射击三角形关系,可以适当调整视线与目标舰船航向夹角,以保证鱼雷垂直命中目标舰船。
取Lyapunov函数=2,将相对于时间微分得到:


(13)
设计控制器:

(14)
其中,为大于零的常数。
将式(14)代入式(13)得:

(15)



(16)

在上述设计的变结构控制导引律下,可以推导鱼雷命中目标舰船的弹道模型,由前面导引律模型和鱼雷与目标运动关系,可以建立鱼雷攻击目标舰船的垂直命中弹道的计算模型:
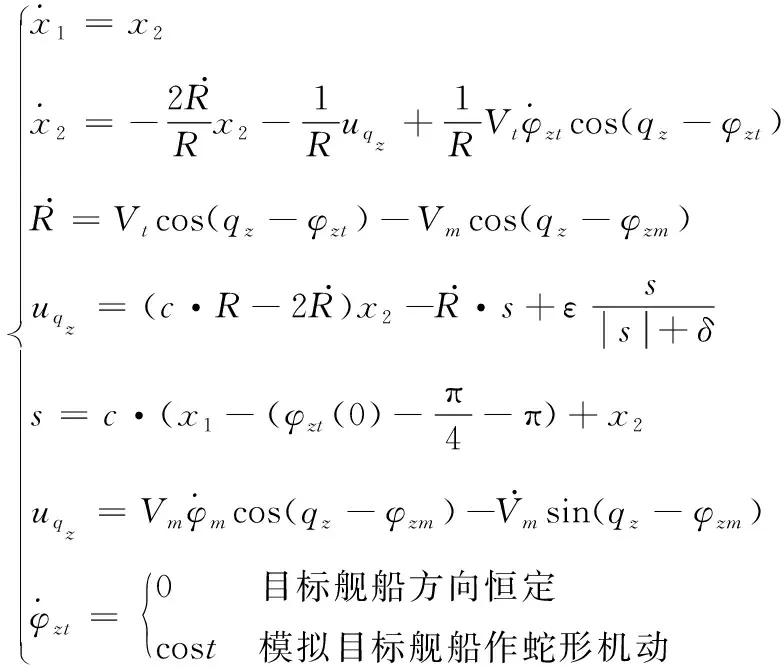
(17)
式(17)中参数在前面均有说明。
式(17)中有7个未知数,7个方程,存在唯一解,根据求解得到的鱼雷航向角和目标的航向角,可以绘出鱼雷攻击目标舰船的弹道轨迹。
4 仿真分析
仿真中假设鱼雷和目标舰船航速恒定,分别为20 m/s、20 m/s,初始视线角(0)=π/4,初始距离=500 m,鱼雷初始航向角(0)=π/4,目标舰船初始航向角(0)=π,并取=2。
根据以上初始条件,采用龙哥库塔法对式(17)求数字解,仿真步长取=0.001 s,仿真时间取=25 s仿真结果如下:
1) 目标舰船不作机动,且航向角为(0)=3π/2,鱼雷初始航向角为(0)=π/2。
图2—图6是由方程组(17)求数字解得到的结果,图7是根据求得的鱼雷与目标航向角,在已知速率的情况下,绘制根据鱼雷和目标舰船运动轨迹得到的弹道曲线。由图2可见,鱼雷与目标舰船的视线角在控制器作用下过渡到0785角度并保持不变,此时鱼雷航向与目标舰船航向保持垂直,由图7可见,鱼雷垂直命中目标舰船。控制量曲线光滑,在工程上有利于实现。

图2 鱼雷与目标舰船视线角曲线Fig.2 Line-of-sight angle between torpedo and target
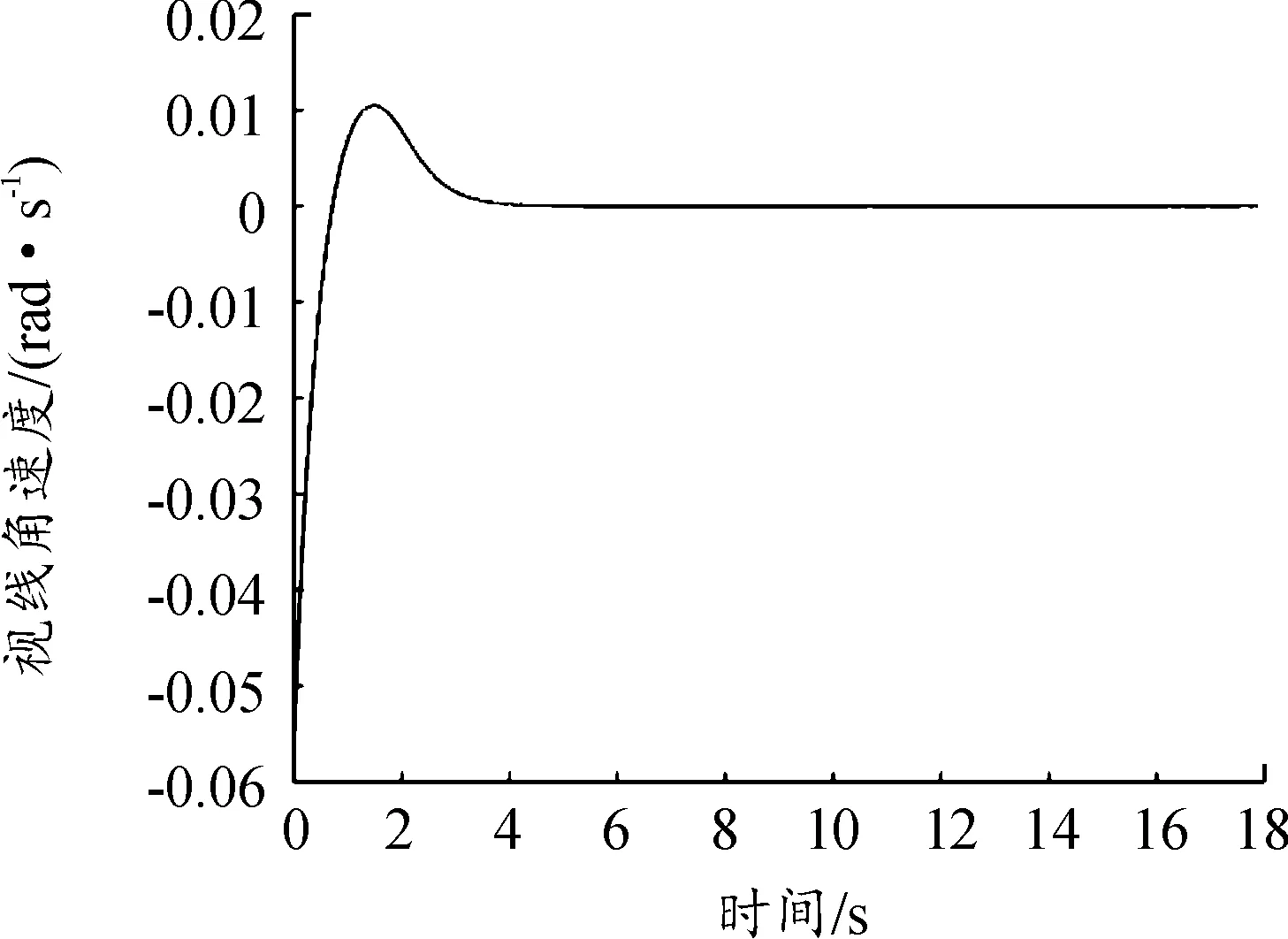
图3 鱼雷与目标舰船视线角速度曲线Fig.3 Line-of-sight angle rate between torpedo and target
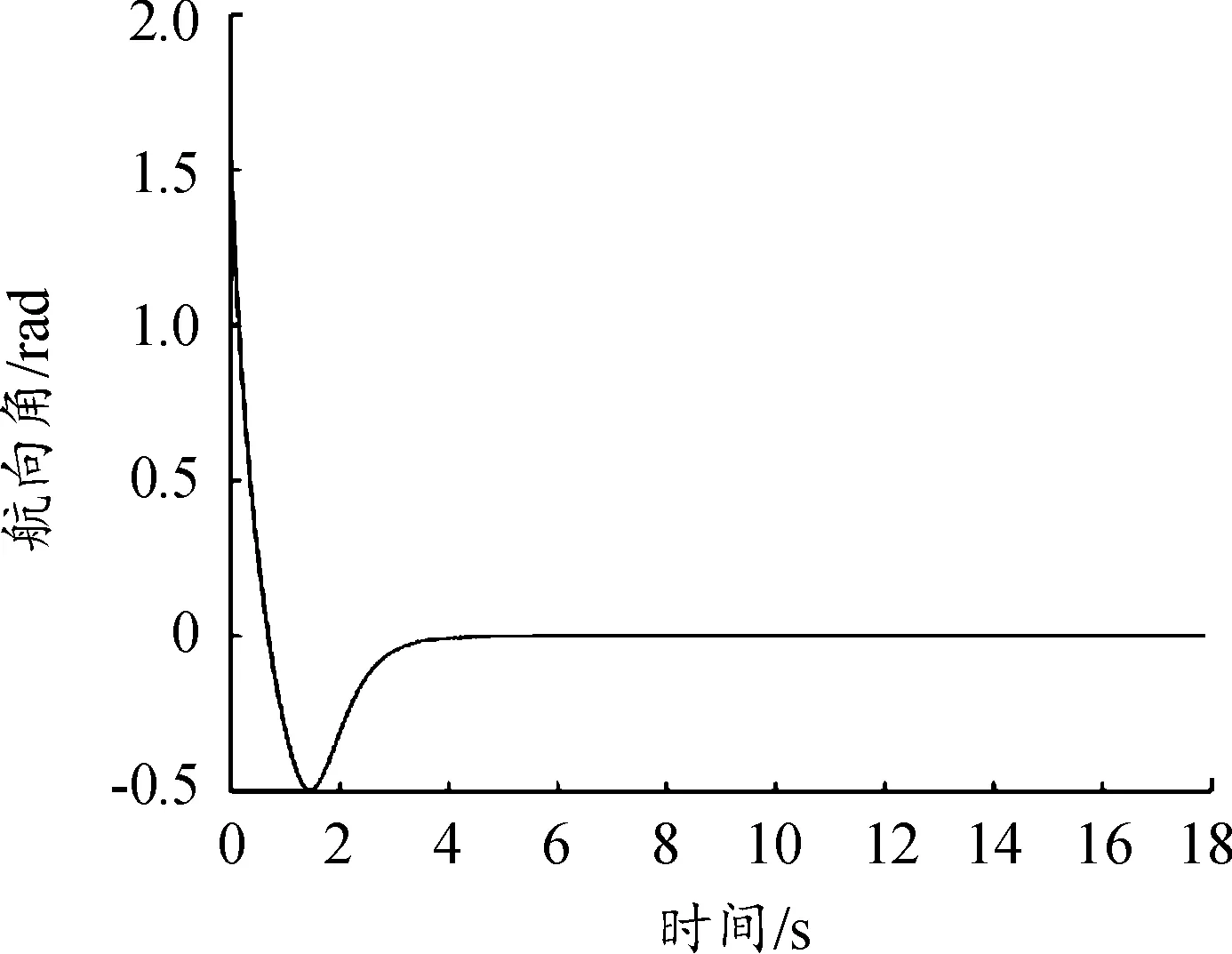
图4 鱼雷航向角曲线Fig.4 Heading angle rate of torpedo

图5 鱼雷与目标距离曲线Fig.5 Distance between torpedo and target
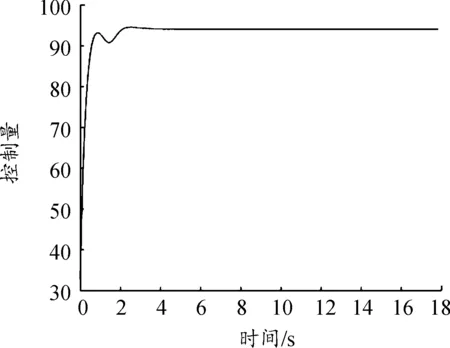
图6 控制量uqz曲线Fig.6 Waveform of controller uqz
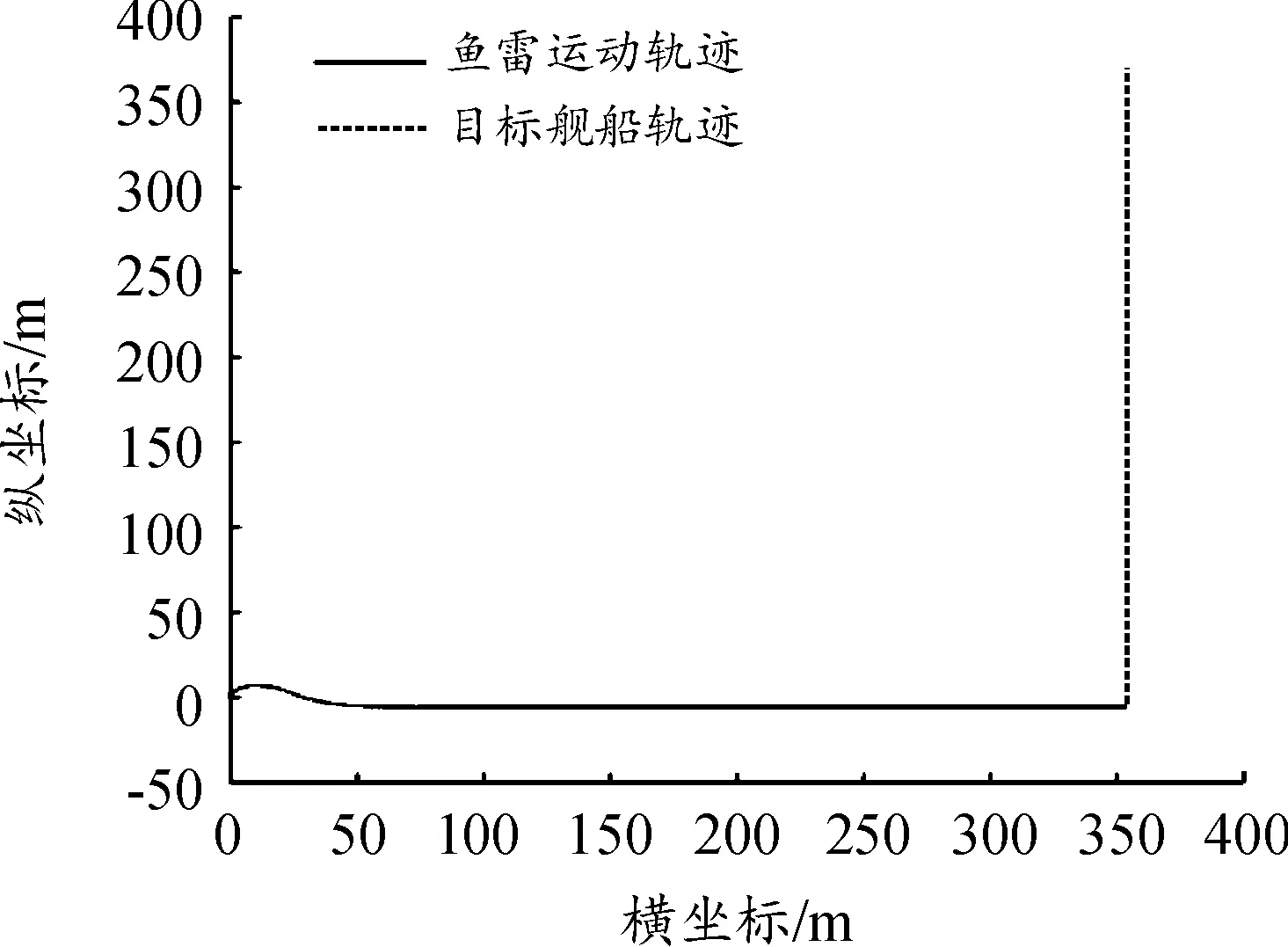
图7 鱼雷攻击目标舰船弹道曲线Fig.7 Trajectory of torpedo intercepting target warship
2) 目标舰船不作机动,且航向角为(0)=3π/2,鱼雷初始航向角为(0)=π/4。
图8—图12为方程组(17)求数字解得到的结果,其中图8表明,鱼雷与目标舰船的视线角在控制器作用下过渡到0.785 4角度并保持不变,此时鱼雷与目标舰船航向保持垂直,由图13可见,鱼雷垂直碰撞目标舰船。

图8 鱼雷与目标舰船视线角曲线Fig.8 Line-of-sight angle between torpedo and target shipwarship

图9 鱼雷与目标舰船视线角速度曲线Fig.9 Line-of-sight angle rate between torpedo and target
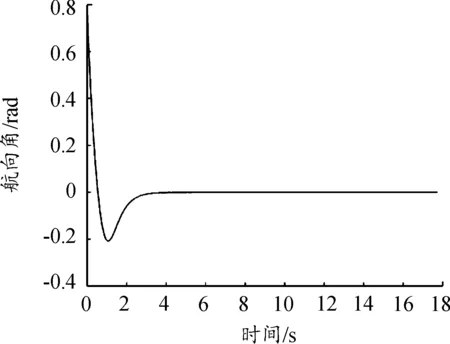
图10 鱼雷航向角曲线Fig.10 Heading angle rate of torpedo

图11 鱼雷与目标距离曲线Fig.11 Distance between torpedo and target
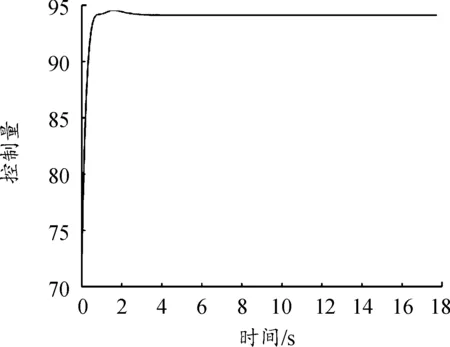
图12 控制量uqz曲线Fig.12 Waveform of controller uqz

图13 鱼雷攻击目标舰船弹道曲线Fig.13 Trajectory of torpedo intercepting target warship
3) 目标舰船航向角为(0)=3π/2-π/10,鱼雷初始航向角为(0)=π/2。
图14—图18为方程组(17)求数字解得到的结果,其中图14表明,鱼雷与目标舰船的视线角在控制器作用下过渡到0.471角度,图19是根据求得的鱼雷与目标航向角绘制的鱼雷和目标舰船运动轨迹,由图19可见,鱼雷在控制器作用下迅速而平滑地调整航向角,并稳定地以垂直方式直接命中目标舰船。

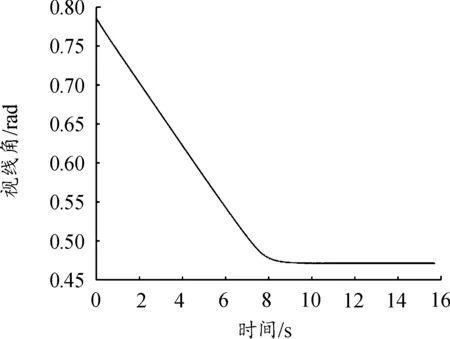
图14 鱼雷与目标视线角曲线Fig.14 Line-of-sight angle between torpedo and target ship

图15 鱼雷与目标视线角速度曲线Fig.15 Line-of-sight angle rate between torpedo and target

图16 鱼雷航向角曲线Fig.16 Heading angle rate of torpedo
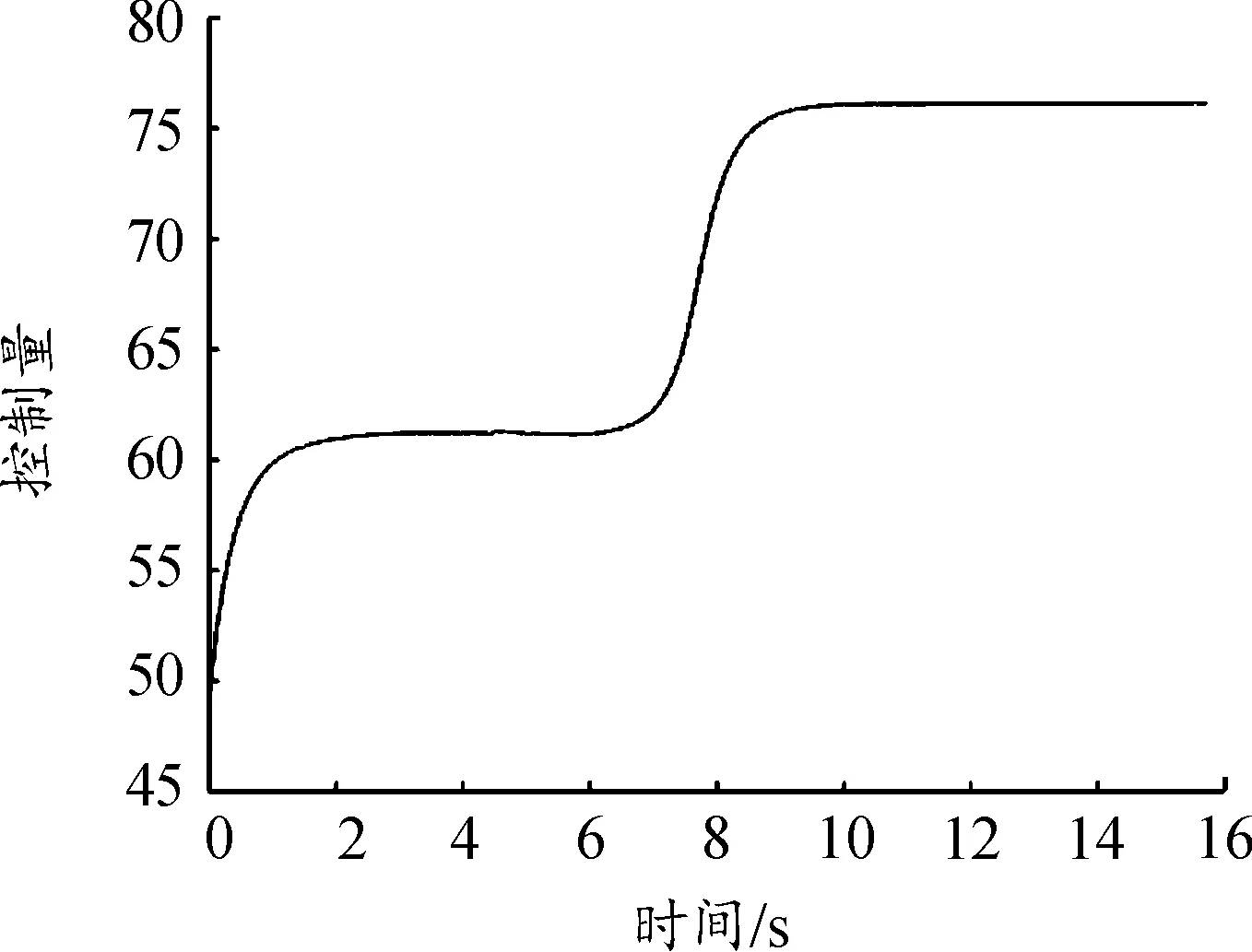
图17 控制量uqz曲线Fig.17 Waveform of controller uqz
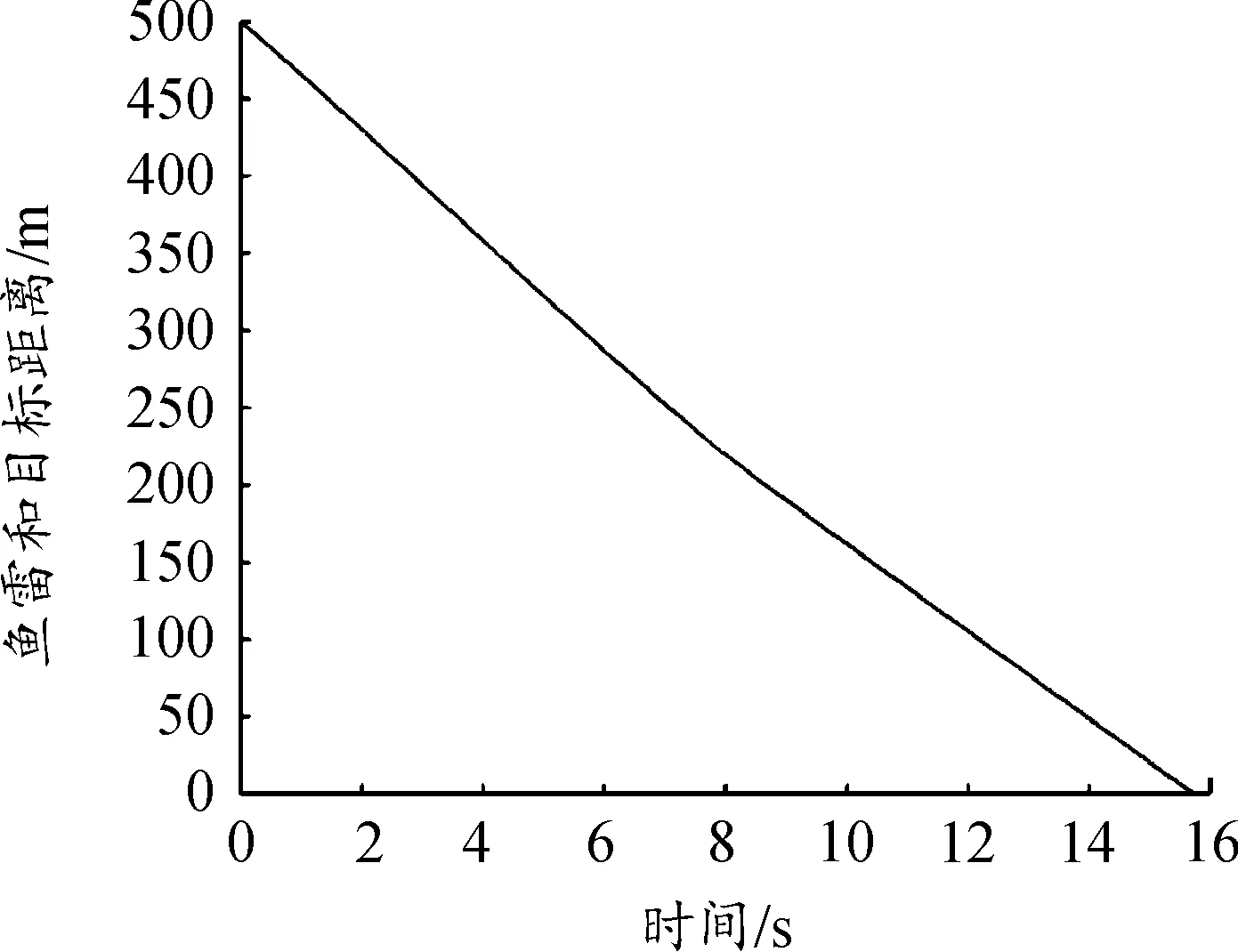
图18 鱼雷与目标距离曲线Fig.18 Distance between torpedo and target
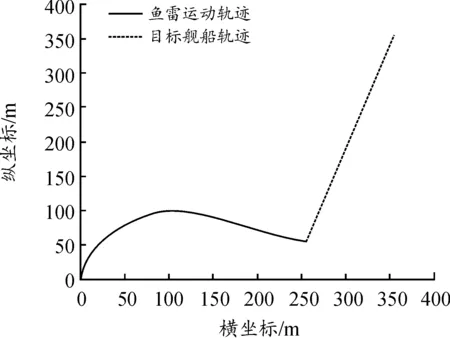
图19 鱼雷攻击目标舰船弹道曲线Fig.19 Trajectory of torpedo intercepting target warship
5 结论
1) 鱼雷与目标舰船之间的视线角能够稳定控制在指定角度,确保鱼雷以垂直命中方式直接碰撞目标舰船。
2) 本文采用变结构控制器,具有强鲁棒性,能够对控制器参数测量误差进行抑制,在工程上具备很强的可实现性。
猜你喜欢
弹道学报(2022年3期)2022-10-08
少儿科技(2021年4期)2021-01-11
中国科技纵横(2020年9期)2020-10-09
兵器知识(2020年8期)2020-08-12
教学与管理(小学版)(2020年5期)2020-07-16
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
师道(2018年6期)2018-07-16
科技视界(2016年19期)2017-05-18
军事文摘(2016年8期)2016-08-11