上肢康复机器人的结构设计*
2022-11-16 10:11丁和标廖泰明李雨彬
机械制造 2022年8期
□ 丁和标 □ 廖泰明 □ 李雨彬
广州城市理工学院 机械工程学院 广州 510800
1 设计背景
近年来,由人口老龄化带来的脑卒中患者数量增加,因交通事故及高强度作业环境等造成的上下肢肢体损伤患者、脊髓损伤患者数量同样在高位。为了帮助患者重新获得较高的生活自理能力,治疗后的康复训练必不可少[1]。现有的康复医师数量已经难以应对日渐增多的脑卒中患者,并且传统的康复治疗一般为一对一人工辅助训练,花费大,周期长,无法实现运动能力的恢复与评估,康复效果受到影响。
上肢运动功能障碍是脑卒中、创伤性脑损伤、脊髓损伤、多发性硬化症的常见后遗症[2],近年来,国内外医疗辅助设备研究工作者对康复机器人开展了大量研究,通过康复机器人代替康复医师辅助患者进行更加有效合理的康复训练,已经成为康复领域的前沿研究热点[3-9]。
上肢康复机器人的工作原理为利用机械手臂带动患者手臂在空间内进行康复运动训练,模拟日常生活中手臂的运动,并通过计算机控制实现手臂各个关节的运动训练、肌肉锻炼及神经功能的恢复训练,使机械手臂与患者手臂协调运动,从而达到最佳的康复训练效果。
笔者选用患者上肢关节康复最常用的五个自由度作为上肢康复机器人的基本构造,参考李鹏克等[10]的研究成果,对上肢康复机器人进行结构设计,通过关节处的电机产生牵引动力,为患者完成康复训练。同时仿照杜海龙等[11]的研究,基于Denavit-Hartenberg法分析上肢康复机器人结构的运动学关系。
2 上肢康复机器人结构
所设计的上肢康复机器人结构如图1所示,包含肩关节、肘关节、腕关节、机架四个部分。肩关节的一端与机架相接,肘关节的一端与肩关节的另一端相连,腕关节与肘关节的另一端连接。机架置于地面上,稳定上肢康复机器人的质心。
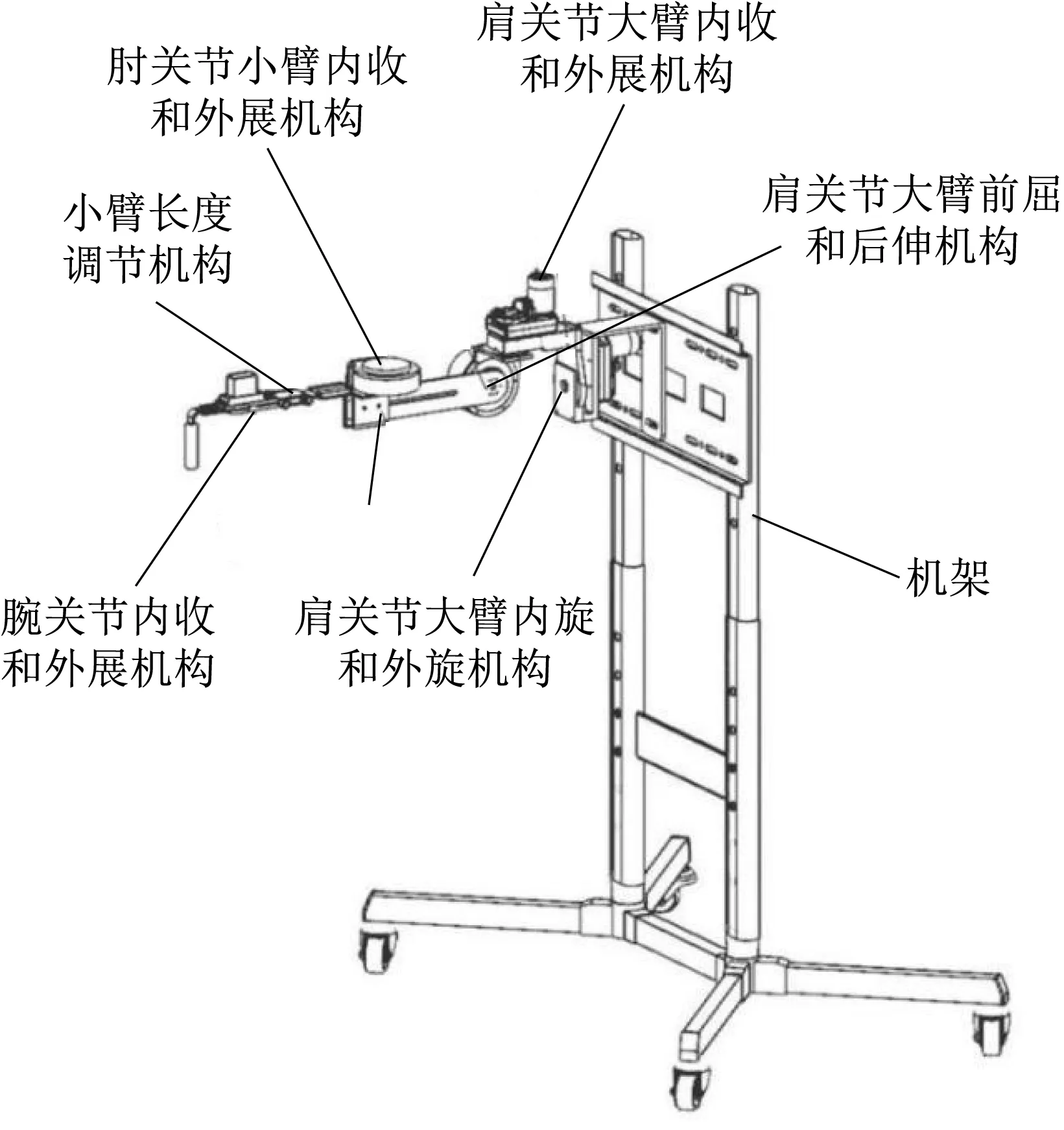
▲图1 上肢康复机器人结构
3 肩关节
肩关节需要完成手臂前屈和后伸、内收和外展、内旋和外旋等动作。肩关节属于球窝关节,球副的设计和控制复杂度较高,对此,所设计的肩关节使用三个旋转轴线相互垂直的旋转副代替较为复杂的球副。
肩关节大臂内旋和外旋机构如图2所示,包括肩块、肩块左固定件、肩块右固定件、机架连接件、舵盘、电机。机架连接件与机架固定连接,肩块右固定件与机架连接件连接,电机固定于肩块右固定件,肩块右固定件与肩块左固定件连接,电机的输出轴端与舵盘的一端连接,舵盘的另一端与肩块连接。肩块大端面的一端开圆形凹槽,用于放置和固定舵盘。电机转动,完成肩关节大臂内旋和外旋动作。
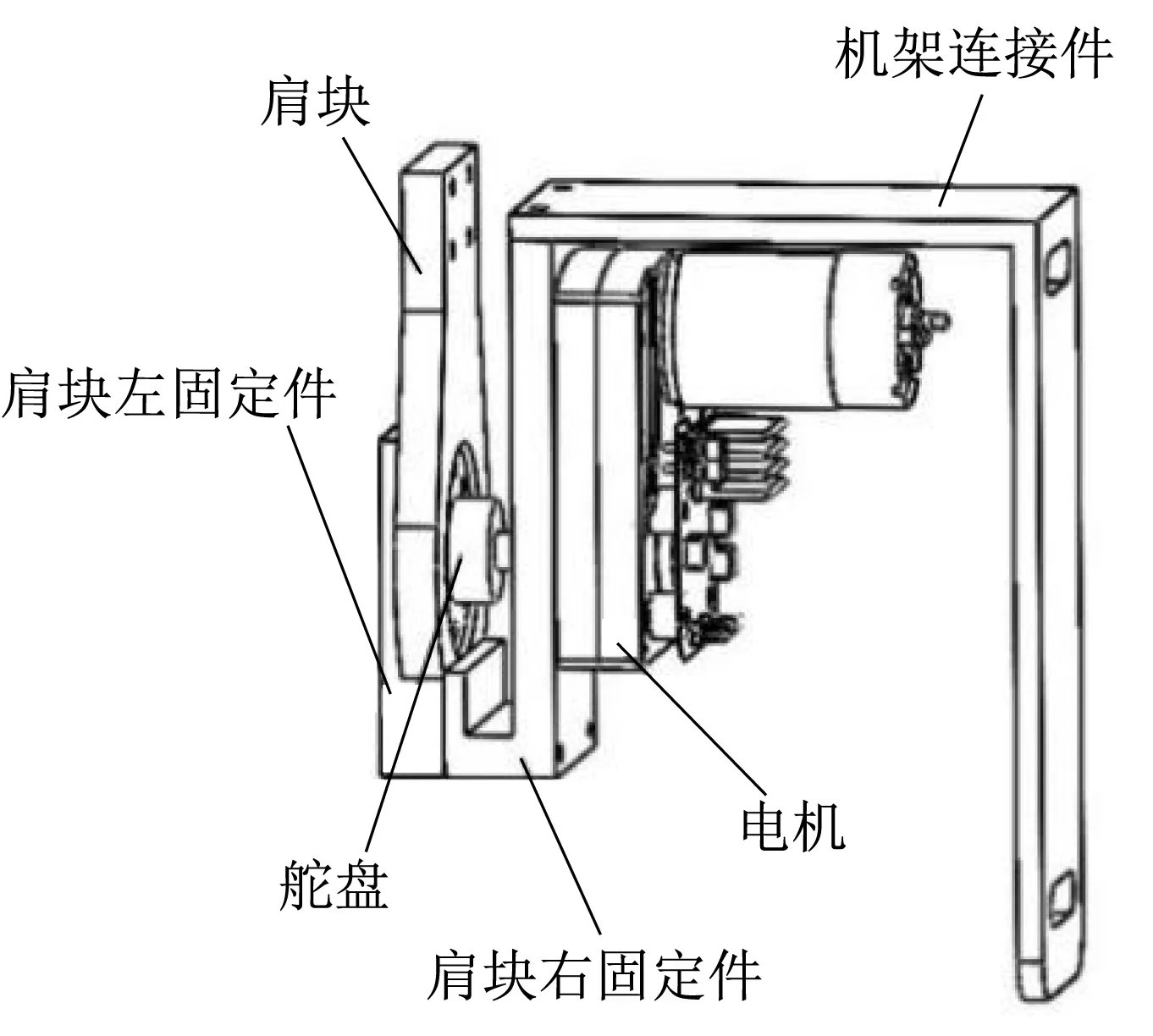
▲图2 肩关节大臂内旋和外旋机构
肩关节大臂内收和外展机构如图3所示,包括肩峰、电机、舵盘、肩袖。肩峰的一端与肩块连接,肩峰的另一端与舵盘的一端相连。肩峰与舵盘的连接端开圆形凹槽和阶梯面,用于放置舵盘。舵盘的另一端与肩袖连接。电机固定于肩峰,电机转动,完成肩关节大臂内收和外展动作。
肩关节大臂前屈和后伸机构如图4所示,包括电机和大臂。电机固定于肩袖,电机输出端与大臂一端连接。电机转动完成,肩关节大臂前屈和后伸动作。
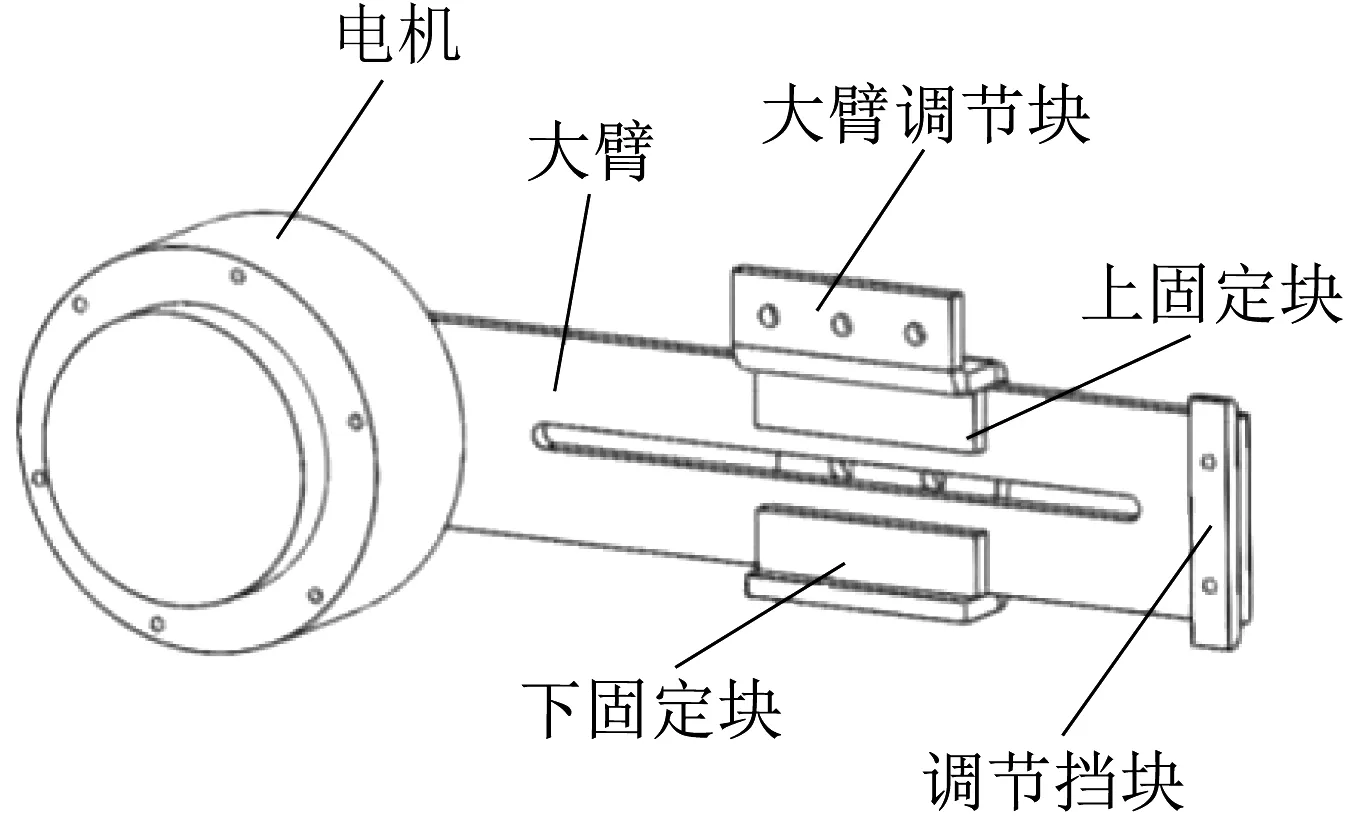
▲图4 肩关节大臂前屈和后伸机构
图4中的大臂调节块、上固定块、下固定块、调节挡块组成大臂长度调节机构。大臂调节块的下端与下固定块连接,大臂调节块的上端与上固定块连接。调节挡块与大臂的另一端固定连接。大臂调节块能够在大臂上滑动,滑动范围为大臂圆形槽两端之间的距离。圆形槽的一端与调节挡块的一端重合,防止大臂调节块滑出。在确定合适的大臂长度后,大臂与大臂调节块固定连接,实现大臂长度的调节。
正常肩关节的运动范围如图5所示。考虑脑卒中患者关节运动的障碍,设置关节角度限制,肩关节内旋和外旋的运动范围为0°~90°,肩关节内收和外展的运动范围为-180°~-60°,肩关节前屈和后伸的运动范围为-45°~90°。
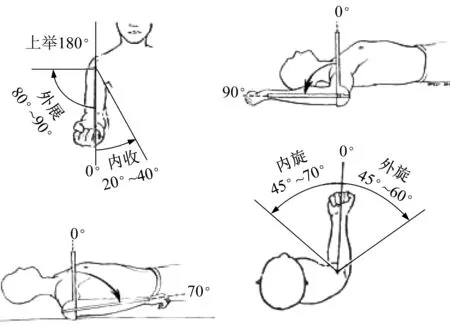
▲图5 正常肩关节运动范围
4 肘关节
肘关节需要完成小臂内收和外展的动作,所以一个旋转副就能满足要求。值得注意的是,肘关节旋转轴线的放置方案有两种。在手臂向前伸直的情况下,一种是肘关节旋转轴线平行于地面,另一种是肘关节旋转轴线垂直于地面。肘关节旋转轴线平行于地面,可以完成小臂内收和外展动作,但当肩关节外旋一定角度后,肘关节的旋转轴线会违背手臂正常旋转规律,此时更易对患者造成再伤害,所以排除这种方案。
采取肘关节旋转轴线垂直于地面的方案,不仅符合手臂旋转规律,解决上述问题,而且对患者的穿戴体验也有明显改善,使结构更加紧凑,质心更加稳定,有效减小驱动负荷。
肘关节小臂内收和外展机构如图6所示,包括肘关节连接块、电机、小臂调节块。肘关节连接块的一端与大臂调节块连接,肘关节连接块的另一端与电机的固定端连接,电机的输出端与小臂调节块连接。电机转动,完成肘关节小臂内收和外展动作。
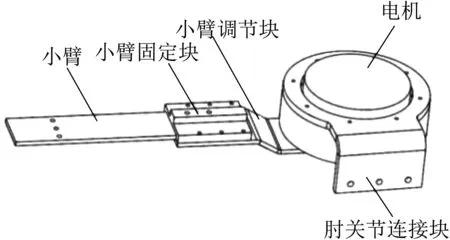
▲图6 肘关节小臂内收和外展机构
图6中的小臂固定块和小臂组成小臂长度调节机构。小臂与小臂调节块连接,小臂固定块与小臂调节块固定连接。小臂能够在小臂调节块上滑动,滑动范围为小臂一端的距离。在确定合适的小臂长度后,小臂与小臂调节块稳定相连,实现小臂长度的调节。
正常的肘关节运动范围如图7所示。考虑脑卒中患者关节运动的障碍,设置关节角度限制,肘关节内收和外展的运动范围为0°~135°[12]。
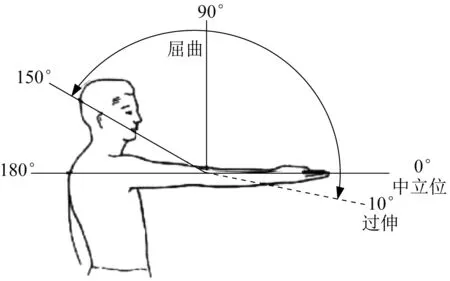
▲图7 正常肘关节运动范围
5 腕关节
腕关节需要完成内收和外展的动作,同样使用一个旋转副可以满足要求。
腕关节内收和外展机构如图8所示,包括腕关节夹板、手腕连接件、电机固定架、电机、舵盘、手柄。腕关节夹板与小臂连接,手腕连接件与腕关节夹板连接,电机固定架与手腕连接件固定连接,电机与电机固定架连接,电机的输出端与舵盘连接,舵盘与手柄连接。电机转动,完成腕关节内收和外展动作。
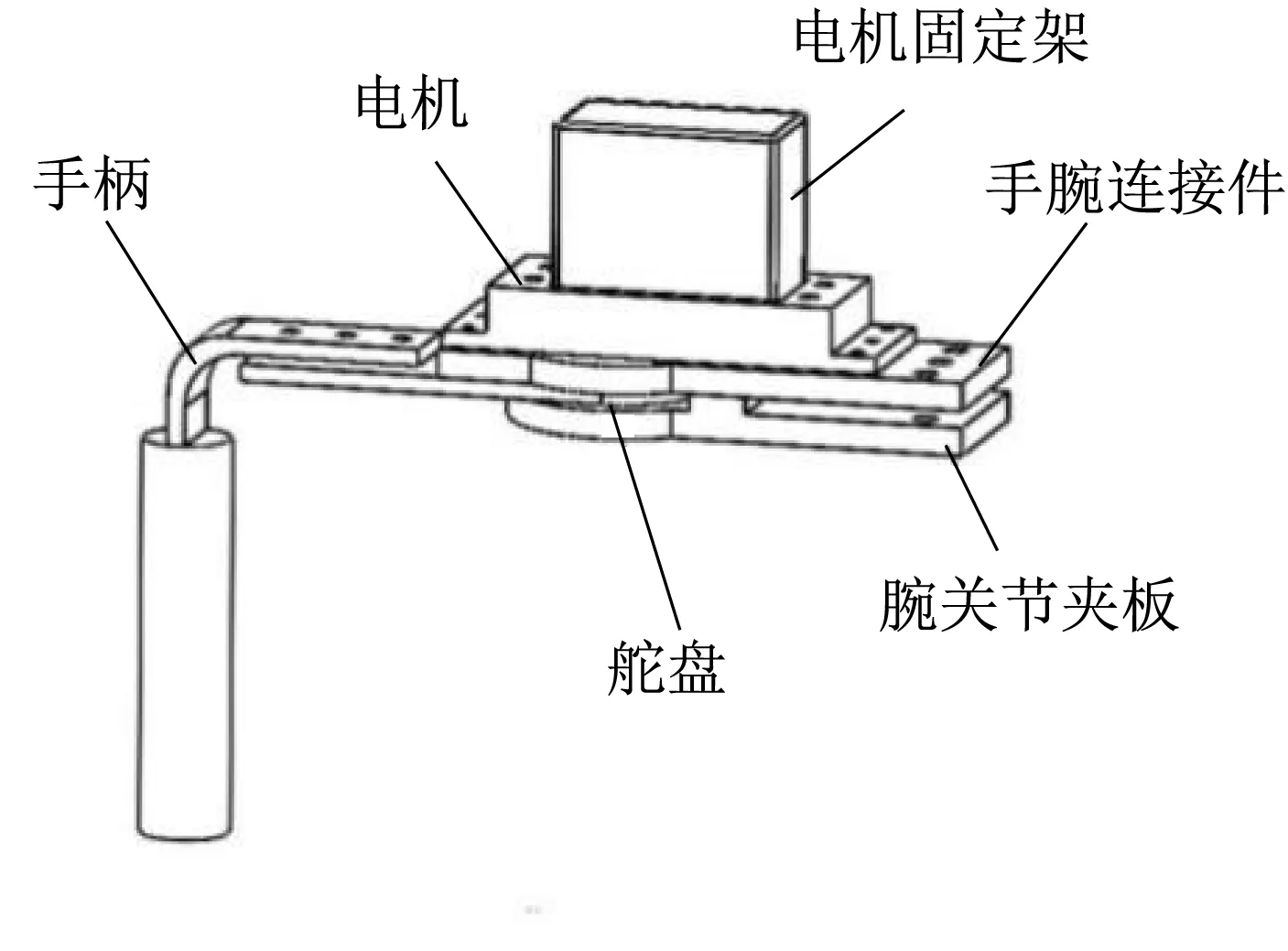
▲图8 腕关节内收和外展机构
正常的腕关节运动范围如图9所示。考虑脑卒中患者关节运动的障碍,设置关节角度限制,腕关节内收和外展的运动范围为0°~90°。
6 机架
机架如图10所示,包括悬架、机架升降杆、机架升降固定杆、横梁、支撑脚架、脚轮。悬架固定于机架升降杆左右两端,机架升降杆与机架升降固定杆连接。横梁固定于机架升降固定杆左右两端,支撑脚架与机架升降固定杆连接,脚轮与支撑脚架末端连接。机架起到连接固定肩关节、支撑整机、调节高度和肩膀宽度的作用。
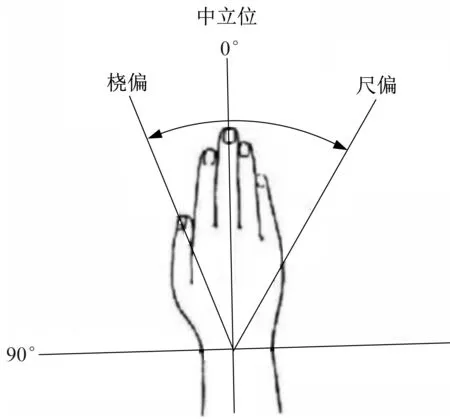
▲图9 正常腕关节运动范围
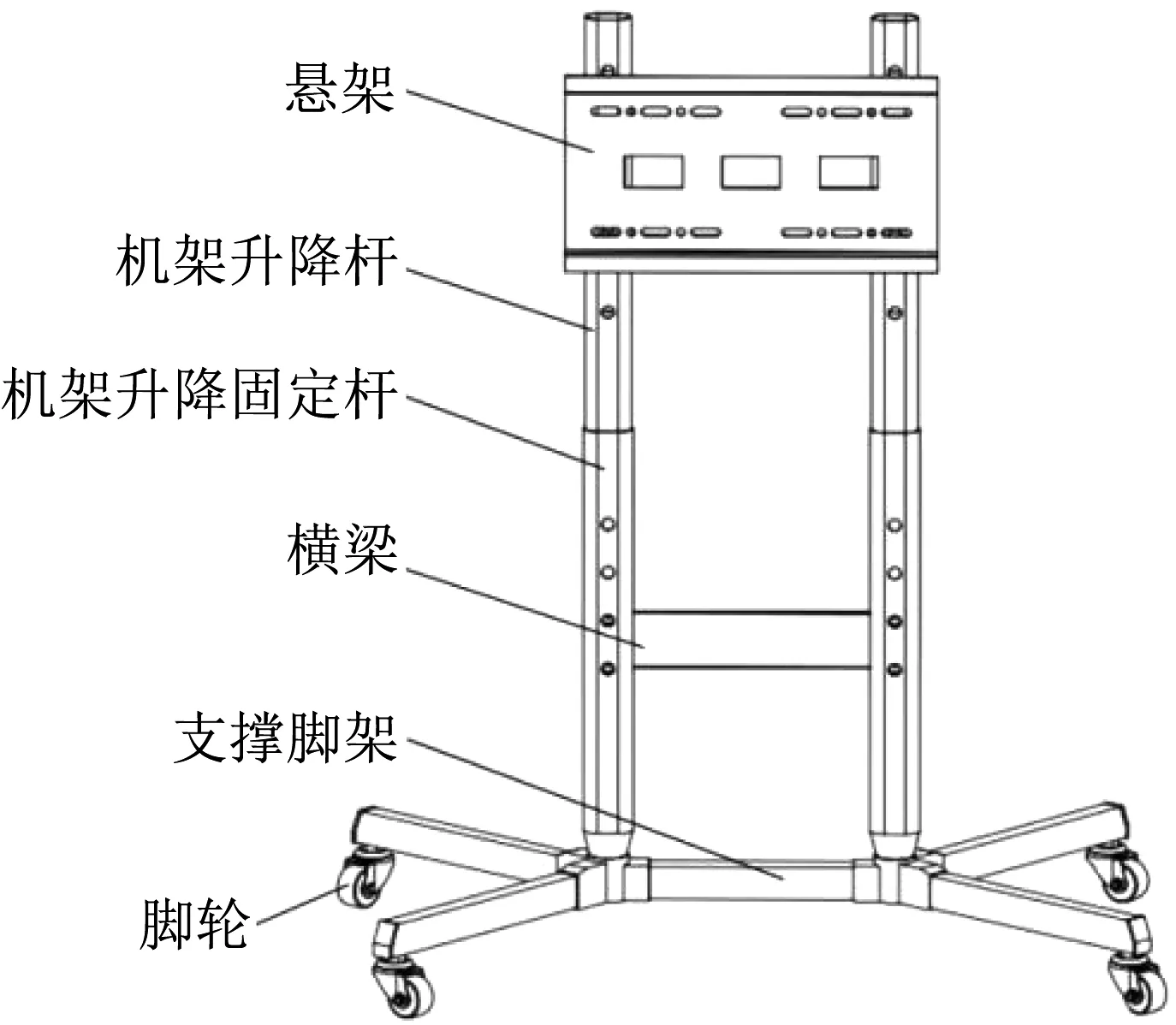
▲图10 机架
7 运动学模型
上肢康复机器人结构满足串联机器人计算式。将基坐标系X0Y0Z0原点O建立在转动副上,OZ轴正方向是轴线指向手臂的方向,并与水平面平行。OY轴方向由右手法则确定。利用改进的Denavit-Hartenberg法建立X1Y1Z1~X5Y5Z5各关节坐标系。上肢康复机器人坐标系如图11所示。
图11中,L1为135 mm,L4为140~210 mm,L5为240~340 mm。根据所建立的坐标系,可以确定描述连杆和连杆连接的参数。上肢康复机器人Denavit-Hartenberg数据见表1。其中,αi为沿Xi轴从Zi轴移动到Zi+1轴的角度,ai为沿Xi轴从Zi轴移动到Zi+1轴的距离,di为沿Zi轴从Xi-1轴移动到Xi轴的距离,θi为沿Zi轴从Xi-1轴移动到Xi轴的角度。
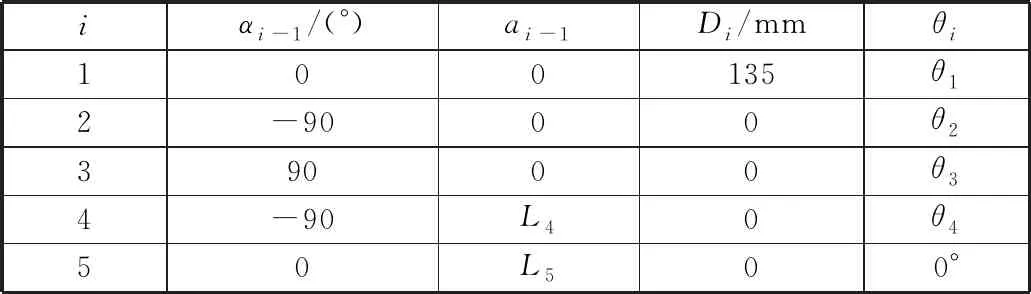
表1 上肢康复机器人Denavit-Hartenberg参数
8 结束语
笔者对上肢康复机器人进行结构设计,选用脑卒中患者上肢康复最常用的五个自由度作为基本构造,组成肩关节、肘关节、腕关节、机架四个部分。在大臂和小臂中均设有长度调节机构,以适应不同患者的手臂尺寸。
在上肢康复机器人各个关节连接的部分增加护垫,不仅能够保护患者手臂,而且可以使患者更加舒适,提高患者的使用体验效果。
根据标准GB/T 10000—1988《中国成年人人体尺寸》[13]得出上肢康复机器人各关节应负担的手臂部分重力和长度,加上铝合金材料带来的重力,计算得出各关节应承受的扭矩,以此来选定电机。通过电机控制各个转动副的不同运动角度,使上肢康复机器人运动,完成各种动作。
笔者还建立了上肢康复机器人的运动学模型,得到上肢康复机器人的Denavit-Hartenberg参数。
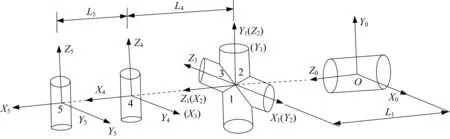
▲图11 上肢康复机器人坐标系
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
中华肩肘外科电子杂志(2020年1期)2020-12-20
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
中华肩肘外科电子杂志(2019年4期)2019-01-03
载人航天(2016年4期)2016-12-01
中华肩肘外科电子杂志(2016年3期)2016-01-23
中国卫生标准管理(2015年24期)2016-01-14
综合智慧能源(2014年1期)2014-09-10