交替投影盲反卷积的阵不变量被动定位*
2022-11-21 01:11王卓越李宇王宇杰迟骋
应用声学 2022年5期
王卓越 李宇† 王宇杰 迟骋
(1 中国科学院声学研究所北京 100190)
(2 中国科学院先进水下信息技术重点实验室北京 100190)
(3 中国科学院大学北京 100049)
0 引言
被动声源定位问题一直是海洋声学研究的热点,常见的被动定位方法有三点定位、匹配场方法、波导不变量[1-2]、阵不变量法等。
阵不变量定位技术作为一种水声信号处理技术,近几年受到了广泛关注。与基于模型的匹配场定位方法相比较,利用阵不变量的被动定位方法不需要海洋环境的准确知识,可以几乎实时地进行目标的定位和跟踪,是一种具有鲁棒性和高效性的定位方法。
Lee等[3]在2006年提出了利用阵不变量的定位方法,该方法能够利用声源辐射信号多条入射路径的入射角度随时间偏移的伪彩图来解算声源的距离信息。但由于利用阵不变量的方法进行定位需要确保在波束域和时域中的多径到达相互分离,因此无法直接应用于连续声源的定位问题。
2010年,Sabra等[4]证明了利用基于射线的盲反卷积技术从未知的声源信号中提取格林函数的可行性。2017年,盲反卷积和阵列不变量的组合被应用于未知波形的声源定位问题上[5-6],解决了无法利用阵不变量方法对水下连续声源进行被动定位的问题。2019年,Byun等[7]将连续干扰消除过程成功应用在阵不变量测距方法上,完成了利用垂直阵区分并估计多个目标距离的工作。
上述研究在应用盲反卷积技术时,部分与所选波束相干性较低的路径提取效果欠佳,使得提取出的格林函数图像存在明显的模糊,直接影响到阵不变量方法的定位精度。
针对上述问题,本文提出基于交替投影(Alternating projection,AP)[8-9]盲反卷积的阵不变量定位方法。该方法利用AP方法分离出多径信号,对多个波束分别进行盲反卷积,并将不同波束提取出的格林函数相干联合起来,最后通过盲反卷积技术与阵不变量方法的级联实现被动定位。通过仿真实验结果验证了该方法在低信噪比条件下实时被动定位的能力,证明了AP盲反卷积技术有效解决了低信噪比下格林函数图像模糊的问题,从而使阵不变量方法的定位精度显著提高。
1 基于AP盲反卷积的阵不变量方法
图1是本文算法的基本流程图。该方法首先将AP方法应用于波束信号的分离上,利用提取的多个入射角进行盲反卷积得到多组格林函数的提取结果;再利用互相关函数(the cross-correlation function)补偿多组提取结果的相对时延,实现格林函数的相干联合估计;最后将联合估计结果应用于阵不变量方法上,解算出声源的位置信息。后文将根据图1所示流程对基于AP盲反卷积的阵不变量方法进行详细论述。

图1 基于AP盲反卷积的阵不变量方法的流程图Fig.1 Flow chart of matrix invariant method based on AP blind deconvolution
1.1 信号模型
一般针对利用垂直阵的阵不变量方法,采用如下模型[3]:假设垂直阵的中心位于(0,zc)处,连续声源位于(r0,z0)处,θ是阵列的观测角度,顺时针为正方向,如图2所示。
考虑一个位于浅海波导中rs=(rs,zs)的点声源,如图2所示,该点声源广播一个信号s(t),其傅里叶变换为

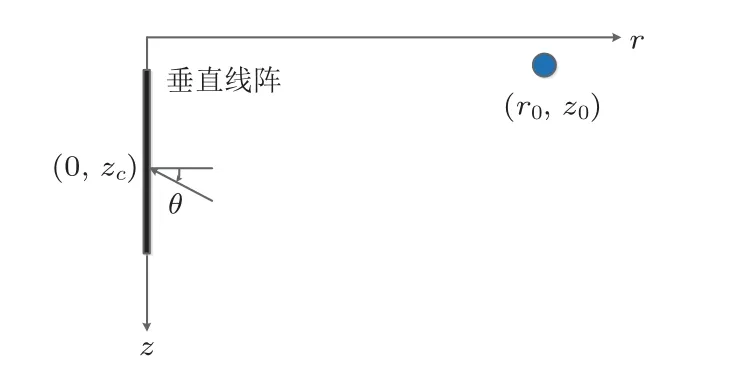
图2 垂直阵与声源位置模型图Fig.2 Vertical array and sound source position model diagram
在垂直阵列位于rn=(0,zn)的第n个阵元上的接收信号pn(t)是由M条多径信号组成的,pn(t)的傅里叶变换可以表示为
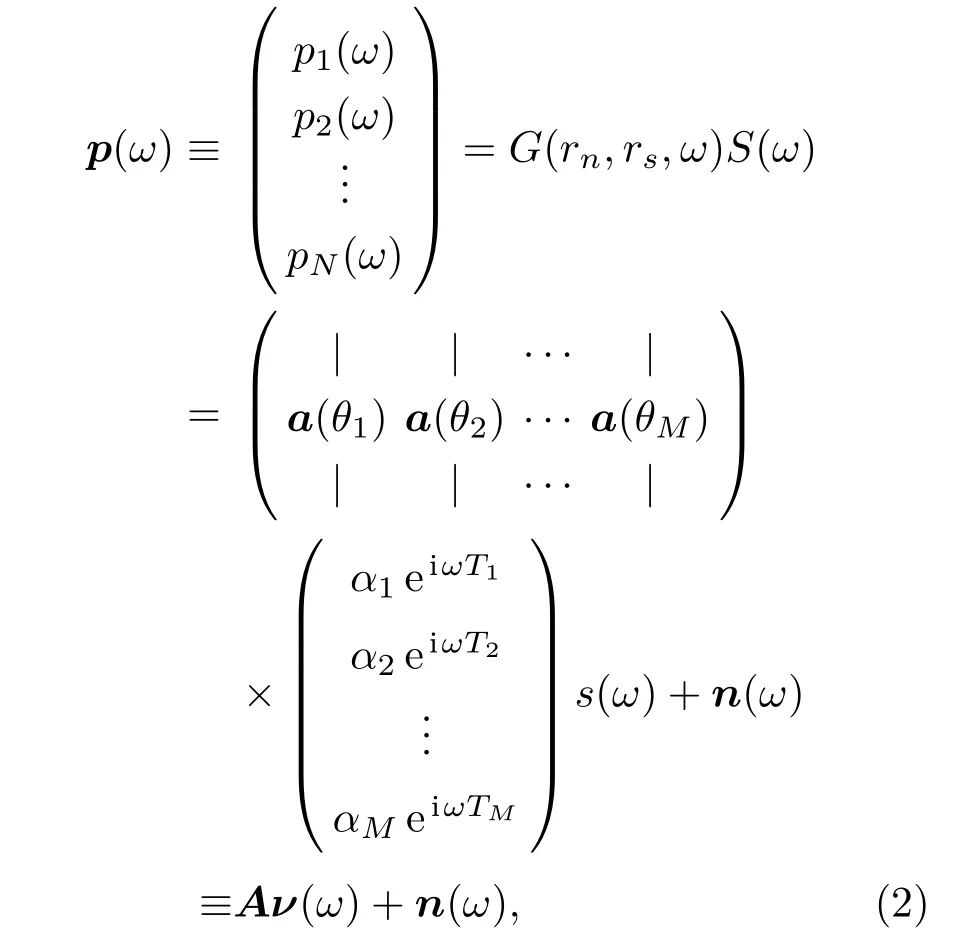
其中,G(rn,rs,ω)是声源与垂直阵(1≤n≤N)的第n个元素之间的时域格林函数g(rn,rs,t)的傅里叶变换;θi、a(θi)、Ti和αi分别表示第i条路径到达角、转向向量、到参考传感器的时间延迟和路径的复振幅;n(ω)为噪声向量,矩阵A为转向矩阵,其中每列代表多径到达的转向向量。根据射线近似,假定αi在频率上近似恒定,即当使用单波束信号进行反卷积时可以假设αi是一个实数,是因为它的恒定相位被认为包含在s(x)中。然而,当多波束进行相干处理时,必须考虑其相位。
声源波形矢量ν(ω)和转向矢量a(θi)分别被定义为

式(4)中,τn(θi)表示第n个阵元与参考阵元之间的第i个路径的时延差。因此,到达第n个阵元的第i路径的总时延为Ti+τn(θi),参数αi、Ti和τi的估计,等价于在射线近似下格林函数的估计。
从接收信号p(x)中分离源波形和格林函数的问题等价于找到以下方程的最优解:

1.2 盲反卷积技术
为了捕获源信号及其未知相位分量Φs(ω),可以将传统的平面波波束形成应用于特定的波束方向,其输出由式(6)给出:
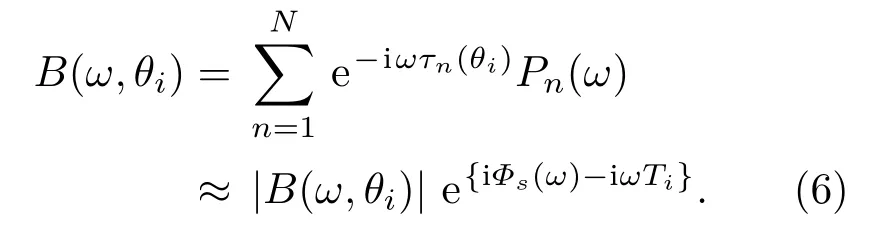
波束形成器输出的相位ψ(ω,θi)=Φs(ω)-ωTi,其中包含了源相位分量Φs(ω),可通过相位旋转从阵元接收数据Pn(ω)中移除:

声源频谱通常不是平坦的,式(7)通过归一化Pn(ω)来消除信号源频谱|S(ω)|。由ˆG(rn,rs,ω)表示盲反卷积的输出结果,其中包括了格林函数幅度的估计值和与时间延迟T(θi)相对应的线性频移ωT(θi)。
1.3 基于AP的盲反卷积技术
基于AP方法的盲反卷积技术与基于射线理论的盲解卷积(Ray-based blind deconvolution,RBD)技术最大的区别在于基与AP的盲反卷积技术改变了仅使用单个波束提取格林函数的方法,采用多波束聚焦的方式,充分利用各波束的信息对格林函数进行联合估计。
基于AP方法的盲反卷积技术主要包括两个步骤:首先通过AP方法实现波束的分离;再将不同波束提取出的格林函数联合起来,实现格林函数的相干联合估计。
1.3.1 利用AP方法进行波束信号分离
本节通过AP方法将式(5)所述的多变量非线性优化问题转化为序列的一维优化问题[6]。首先应对第i条路径的入射角θi进行估计,使用式(8)所述的连续干扰抵消过程(Successive interference cancellation,SIC)实现波束信号的分离。

假设多路径的数量是已知的或可以估计的。AP方法和传统的时延求和波束形成的差别在于AP法将前一次迭代中识别出的波束信号从剩余信号中减去。通过对产生的残差信号进行波束形成来搜索后续入射角。这样的迭代过程在估计后续入射角时可以减少已被识别波束的干扰。

如式(9)所示,ν(ω)包括波束到达时间和声源信号频谱的因子s(ω)。
1.3.2 基于相干联合的格林函数提取方法
本节介绍利用1.3.1节分离出的多波束信号获得格林函数(即信道冲击响应,CIR)的方法。在传统的RBD技术中,利用从波束形成器输出中峰值最大的波束信号的相位来估计格林函数。当存在与所选波束信号低相干性的路径时,RBD方案则不能很准确地检测到这些路径。为了解决这一问题,使用多个波束信号来估计格林函数,首先,从式(8)选择了入射角为θi的波束,通过盲反卷积技术估计频域的格林函数,如下所示:

这里ˆG(rn,rs,ω,θi)代表利用第个i波束获得的第n个阵元的频域格林函数。由于不同波束的格林函数具有不同的时间延迟,因此会产生相对时间偏移,在对不同波束提取的格林函数相干组合之前需要对相对时延进行补偿。一般情况下,可以利用式(9)中ν(ω)元素之间的互相关系可以得到时间偏移信息。
互相关函数以及第1个波束到达的相对时间偏移量可以表示为

利用公式(12)给出的时间偏移信息,将利用不同波束提取的格林函数进行相干组合:

其中,ΔTi是ΔT的第i个元素。对于相干联合,复振幅αi的相位差也需要补偿,它也可以从ri(t)当t=ΔTi的相位中得到。
2 阵不变量方法
在没有阵列倾斜的情况下,阵列不变量可以直接应用于通过盲反卷积提取的格林函数,用于源距离估计。声源和垂直阵之间的水平距离r0从式(14)中获得:

其中,c是本地声速,其标准值为c=1500 m/s,对于理想的波导和底部相互作用的浅水环境,β≈1,这个公式就化简为r0=-c/χ0。因此,声源距离r0主要由阵不变量χ0决定,在浅水区为负值。阵列不变量χ0定义为

其中,s=sinθ,t是传播时间。方程(15)使波束时间偏移图中波束时间坐标(s,t)形成椭圆曲线。
3 算法实现
(1)转向:采用常规平面波波束形成,旋转波束朝向最大到达角,输出为
其中,τn(θi)是相对于参考阵元的第n个阵元接收到的来自第i条路径的时延差,Pn(ω)是在深度zn的第n个阵元接收到的信号pn(t)的傅里叶变换,N为接收阵阵元数目。波束输出的相位信息ψ(ω,θi)=Φs(ω)-ωT(θi),其中,Φs(ω)是未知声源信息的相位,T(θi)是第i条路径信号的传播时间。a(θi)是第i条路径对应的转向向量。
(2)合成:假设入射功率在阵列上均匀分布,将波束转向结果归一化为1/N,重构第i束波束角对应的压力场:

(3)移除:从总压力场中减去合成压力场(即干扰)得到去除第k个到达的修正声压场。

(4)利用AP方法实现波束多径信号分离:
(6)利用多波束进行相干联合格林函数估计公式如下:

式(21)中,Pn(ω)是第n个阵元接收到的原始信号pn(t)的傅里叶变换。
4 仿真分析
本节对连续噪声源的情况进行仿真,验证本文所提出算法的性能。
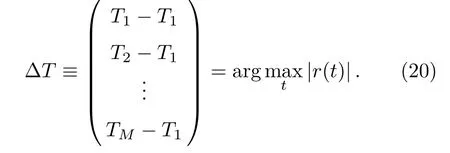
使用KRAKEN工具包仿真浅水环境下垂直阵的接收情况,环境参数如图3所示。声速剖面数据使用SWellEx-96实验采集的声速数据[10],1996年进行的SWellEx-96实验,其地点距离加利福尼亚州圣地亚哥附近的洛马角大约12 km。实验地点的声速剖面如图4所示,海面和海底附近声速分别为1519 m/s和1488 m/s。海底采用两层介质模型,介质密度为1760 kg/m3,声衰减系数为0.2 dB/λ;沉积层厚度23.5 m,上界面声速为1572.3 m/s,下界面声速为1593.0 m/s;基底层为半无限空间,声速为1593.0 m/s。

图3 垂直阵仿真实验声源及阵列位置示意图Fig.3 Sound source and array position diagram of vertical array simulation experiment
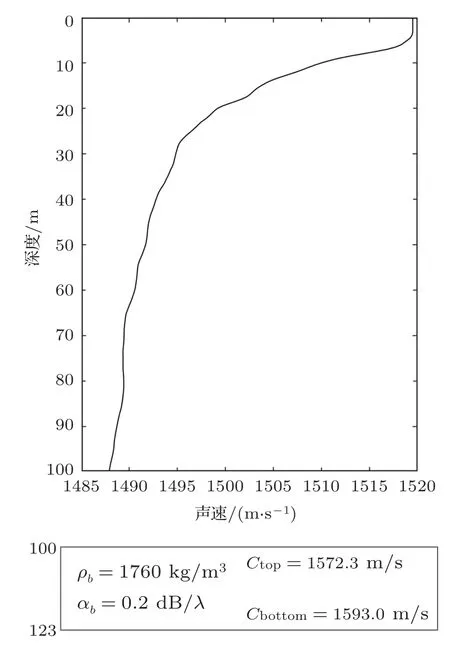
图4 海洋环境模型Fig.4 Marine environmental model
使用置于上述波导环境中的25元垂直均匀线阵,阵元间距为1 m。布放在38~62 m水深处。仿真声源信号为400~1200 Hz的宽带噪声信号。目标声源距离阵列中心的距离分别为1600 m。带内信噪比为20 dB。
图5是使用KRAKEN对图4所示的环境条件进行宽带传播建模的结果。模拟结果表明,接收信号的波前由表面和底部边界的反射形成4组,接收阵元处的格林函数共8个多径入射角。

图5 KRAKEN仿真格林函数理论值Fig.5 KRAKEN simulation Green’s function theoretical value
使用前文中描述的AP方法进行波束分离的过程如图6所示。从图6(a)可以看出,波束1接近5.5°,从接收信号中消除波束1后,重新搜索波束最大值,找到波束2为-9°,即为图6(b)所示;同理,消除波束1和波束2后波束3在13°,消除波束1、2、3后,波束4在19°,结果如图6(c)和图6(d)所示。
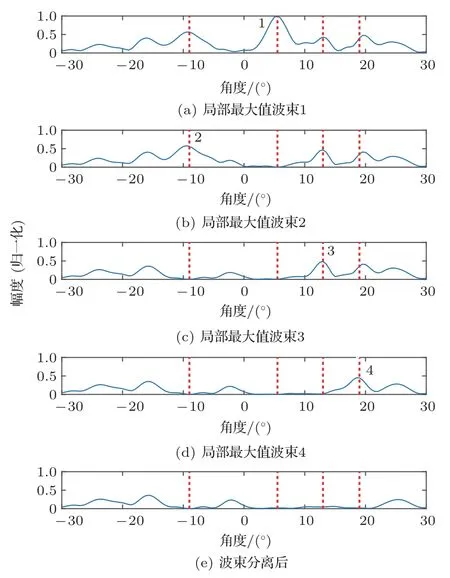
图6 利用AP方法进行波束分离Fig.6 Beam separation using AP method
为了实现对格林函数的联合估计,必须根据公式(20)描述校正各自波束信号之间的时延差。为此,使用强度最强的波束1信号来计算波束2、波束3和波束4信号的互相关函数,见式(11)和式(12)。得到多个分离波束信号的互相关函数如图7所示。在互相关过程中,对每个波束信号进行归一化处理,使所有波束信号具有相同的能量。当比较互相关函数的峰值振幅时,可以看到第2束、第3束与参考(第1)束有最大的相干性,而第4束的相干性比前两束都低。将估计的波束信号之间的时延差被替换到公式(23)中,实现对格林函数的相干联合估计。

图7 分离波束信号的互相关系数Fig.7 Beam separation using AP method
如图8所示,1、2,3、4显示了分别使用波束1、2、3、4获得的延时补偿格林函数。其中利用各波束提取出的格林函数经过时延补偿与波束1的到达时间是时间对齐的。
根据图8(a)~图8(d)所示,根据所选波束与其他路径的相干程度,从单波束得到的格林函数可以看出利用不同波束提取格林函数的效果不同,波束1的提取效果明显好于其他波束。图8(e)显示了用联合估计算法得到的相干组合的格林函数。它等价于上面给出的4个格林函数的相干组合。结果表明,相干组合的格林函数比单波束的结果提供了更清晰的提取结果。相比于较为清晰的提取结果1,可以看出,提取结果5的第4条路径和第6条路径在强度上都有一定程度的提高。

图8 利用不同波束提取出的格林函数Fig.8 Green’s function extracted by different beams
图9分别是利用波束1单波束和联合估计提取格林函数做出的波束时间偏移图。图9(a)是联合估计算法得到的波束时间偏移图,图9(b)是单波束1的结果。利用图9(a)联合估计算法估计出的距离,相对误差为0.8%;利用图9(b)单波束常规方法估计出的距离,相对误差为6.9%。
图10是图9中两种波束时间偏移图上第4个亮点的局部放大图,蓝色方框代表该亮点理论值,红色方框是该亮点最大值实际出现的位置。可以看出利用波束1的单波束提取方案[11]偏离理论值的距离更远,存在更大的模糊。通过联合提取的方式能够在一定程度上提高测距精度。
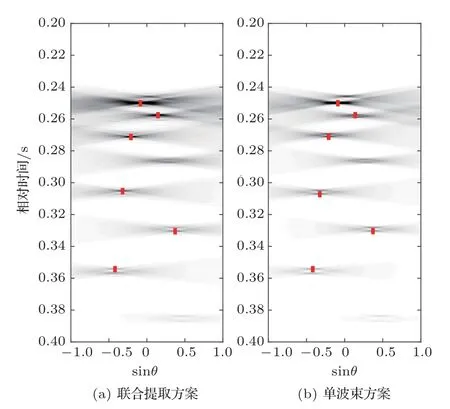
图9 联合提取方案和单波束方案的波束时间偏移图Fig.9 Beam-time image of joint extraction scheme and single beam scheme
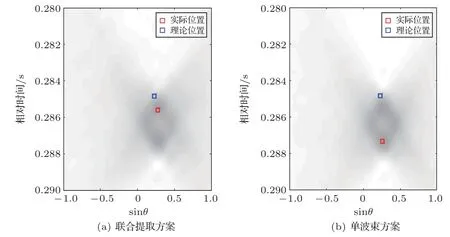
图10 联合提取方案和单波束方案波束时间偏移图的局部放大图Fig.10 Local magnification of beam-time image of joint extraction scheme and single beam scheme
由表1信噪比为5~20 dB时的测距结果可以得出结论:
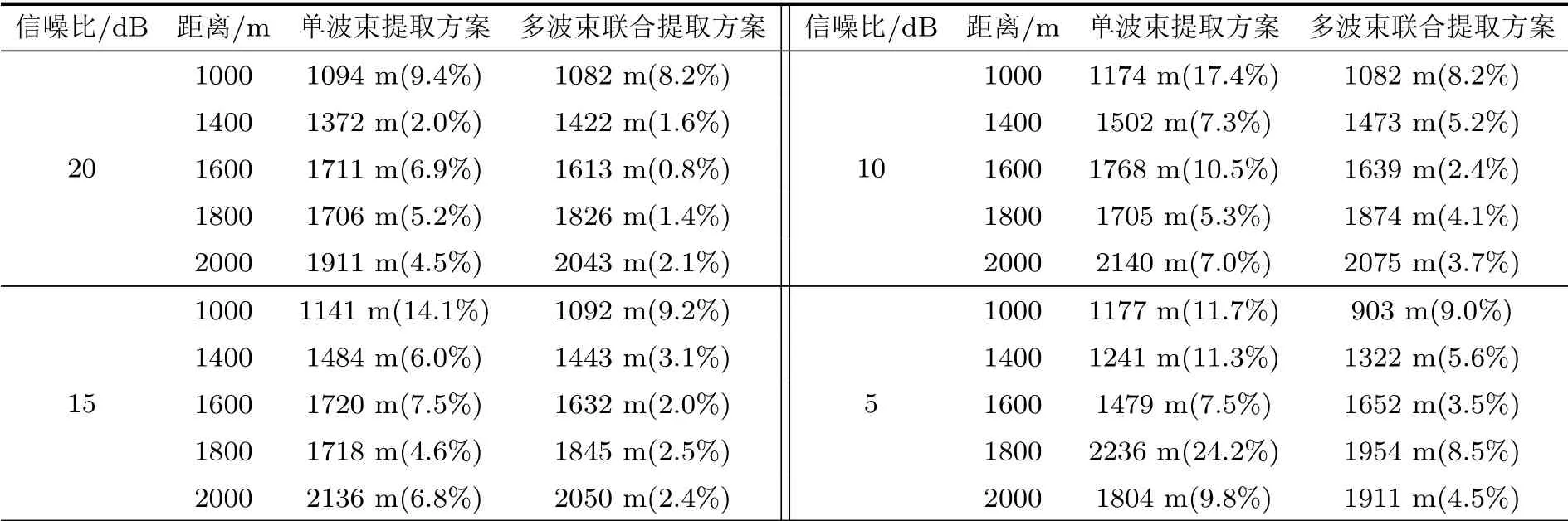
表1 不同信噪比条件下多组距离仿真结果Table 1 Simulation results of multi-group distance under different SNR conditions
(1)在相对较高的信噪比条件下,利用阵不变量方法进行距离估计相对误差基本在15%以内。
(2)将利用多波束联合提取的格林函数应用在阵不变量方法上,定位精度显著提高,在信噪比为10 dB的条件下,单波束提取方案平均距离估计的相对误差为9.5%,多波束联合估计方案相对平均估计误差为4.7%,多波束提取方案的距离估计误差降低了50.5%。
根据上述仿真结果,可以得出结论,在20 dB甚至更低的带内信噪比条件下,随着信噪比的降低,单波束提取方案的定位精度存在明显的下降,利用多波束联合提取方案的阵不变量方法测距方法具有更高的精度且更加稳健。可见将多波束联合提取方法应用在阵不变量定位方法上,有效地解决了低信噪比情况下由于路径相干性低引起的格林函数提取模糊的问题,从而间接改善了利用阵不变量方法的测距精度。
5 结论
本研究采用AP方法对传统的盲反卷积技术进行了改进。基于AP方法的波束形成因为具有SIC过程从而具有更高的角度分辨率。可以将常规波束形成不能很好地分辨的小能量波束进行分离。此外,本文提出了一种将多个波束得到的格林函数结果相干联合起来的方法。通过仿真实验验证,这种联合估计格林函数的方法实现了对现有多路径结构的更好的识别,也间接提高了利用阵不变量对连续噪声源进行定位时的定位精度,提高了阵不变量方法在低信噪比条件下的稳健性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
现代仪器与医疗(2022年1期)2022-04-19
航空学报(2022年2期)2022-03-29
北京理工大学学报(2021年12期)2022-01-13
北京理工大学学报(2021年8期)2021-09-14
电子制作(2021年12期)2021-07-18
舰船电子对抗(2021年2期)2021-06-16
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04