基于可重构虎克铰链副的仿人变胞手设计与分析
2022-12-01 02:37戴建生王瑞钦
天津大学学报(自然科学与工程技术版) 2022年3期
戴建生,安 伟,王瑞钦,李 磊
基于可重构虎克铰链副的仿人变胞手设计与分析
戴建生1, 2,安 伟1,王瑞钦1,李 磊1
(1. 天津大学机构理论与装备设计教育部重点实验室,天津 300072;2. 伦敦国王学院自然科学数学科学工程科学学院,伦敦 WC2R 2LS)
三指手能够模仿人手的大拇指、食指和中指的姿态,从而实现仿人手的动作.变胞手掌的引入,更加提升了机械手的工作空间以及抓取可适应性.着眼于对手掌的仿生设计,基于可重构虎克铰链副(rT铰链副),设计出一款新型的仿人变胞手,使机械手可以部分模拟出人手的真实动作,从而增强机械手在空间中的抓取能力.将含有rT铰链副的六杆机构作为机械手的手掌,基于rT铰链副的可重构特性,使机械手的手掌在rT铰链副的不同构态下呈现出不同的运动方式,变胞手的手掌操作平面与平面的倾角以及手掌工作空间的大小也可以呈现不同的变化.因为当手指长度固定时,若要获得最大操作空间,机械手手掌的半径与物体半径有近似正比例对应关系,因此机械手掌半径的较大变化有利于提高机械手的抓取灵活性.此外,此机械手掌在非奇异构型下的单自由度特性也有利于机械手的控制,提高其工作稳定性.运用旋量系分解与基于公共约束和冗余约束的活动度扩展准则分析了该手掌在其工作空间内两个奇异位姿及其过渡姿态的活动度,并计算了新型变胞手在不同工作模式下手掌的工作空间大小及手掌工作平面位置,同时给出了手指操作平面倾角的变化与手掌半径的变化,展示了采用此变胞机构作为手掌的机械手的优异性能.
可重构虎克铰链副;变胞手;机械手;工作空间;活动度
人手既能对物体进行灵巧的手内操作又能将其牢固地抓握,因此数十年来机械手学者们致力于制作一款近似于人手的机械手.理论证明,简单的手掌配合低自由度的手指仍然可以实现人手大部分的功能,因此为了尽可能地减少由于自由度过多而造成的控制与设计的麻烦,研究者们使用欠驱动的手指和低自由度的手掌来实现抓握动作[1].国际上经典的机械手有三指的Stanford/JPL Hand[2],四指的Utah/MIT Hand[3],五指的Belgrade/USC hand[4]、Karlsruhe Dexterous IN Hand[5]、DLR hand[6]、NAIST Hand[7]和UBH3 hand[8]等;国内对于机械手的研究起步较晚,北京航空航天大学于1993年研制出我国第一只拟人手BH-1,并在此基础上研制出了BH2、BH3三指手和BH4四指手[9].哈尔滨工业大学与德国宇航中心在2001年研制出了HIT-I手[10],并在此基础上研制出DLR-HIT手[11].21世纪以来,国际上对机器人灵巧手的研究已从探索和研究阶段逐渐转移到实际应用阶段,灵巧手的应用范围不断扩大,越来越多的灵巧手出现在各个行业.
变胞机构是一类变拓扑、变自由度、变结构的自适应智能机构.在传统机构的基础上,结合变胞机构的一些元素,便可设计出新的变胞机构.为了克服手掌柔韧性低对机械手的工作空间、操作性和灵巧性的不利影响,Dai等[12-13]应用了变胞机构来扩展手掌的自由度.变胞手[14]的手掌基于闭环球面五杆机构,可以折叠和展开,指状物安装在球形机构的杆件上,手掌的变形可以调节手指根部的位置,从而大大增加了手指的触及范围.2017年Cui等[15]设计了一种具有平面可重构特性的变胞手,使机械手可适应复杂的抓持任务.
现有的对机械手的研究更多地着眼于对手臂的设计和运动控制[16]以及手指的设计,并发展出了一系列具有自适应性的欠驱动手指和自耦合的手指[17],但对于仿生机械手掌的研究不够深入.本文基于Dai提出的变胞手的设计理念,采用一个含可重构虎克铰链副[18]的六杆变胞机构作为机械手的手掌,可以实现对人手动作的模仿,如手掌折叠、手掌捻转、二指夹紧等.通过对新型变胞手掌机构的分析,给出了变胞手掌在不同构态下的运动方式,同时对新型变胞手手指操作平面、手掌工作空间、手掌操作平面在空间中倾角和位置以及手掌的半径变化进行了分析,揭示了采用此六杆变胞机构作为变胞手掌对机械手抓取适应性与灵活性的提升.
1 变胞手掌设计与分析
1.1 变胞手掌的设计
一般来说,人手的大拇指、食指与中指就可以完成大部分的工作任务,因此本文所设计的机械手为三指手,模仿人手大拇指、食指与中指的动作.通过对人手的分析可知,虽然人手有约21个关节,但人手的运动很多是耦合的.将人手掌作为工作平面并根据人手的动作在其上添加所需的关节,即可完成对仿人变胞手掌的设计.
观察人手实际运动可知,在食指与中指之间添加一个如图1所示的旋转关节即可实现人手食指与中指间的全部动作.在实际情况中,当手掌进行如图2所示的折叠运动时,食指与中指之间的转动副失效,并且大拇指根部与实际手掌可实现折叠动作.基于以上分析可设计出手掌的机构,其原理图如图3所示.其中,关节1、2、3、4、7均为旋转关节,5(6)为可重构虎克铰链副上的关节.整个变胞手掌由连杆、、、、、构成,其中的杆长与的杆长保持相等.建立如图3所示坐标系,在初始位置时六杆组成一正圆,旋转关节4与7的轴线共线,其轴线到圆心的距离为,1、2、3为连杆、、所对应的圆心角.当初始位置手掌圆的圆心半径与以上设计参数给定,即可得变胞手掌机构的全部信息.图4为新型仿人变胞手的机械结构,其中大拇指固连在杆的中心,大拇指根部与手掌的安装点记为1,食指固连在杆的中心;食指根部与手掌的安装点记为2;中指固连在杆的中心,其根部与手掌的安装点记为3.
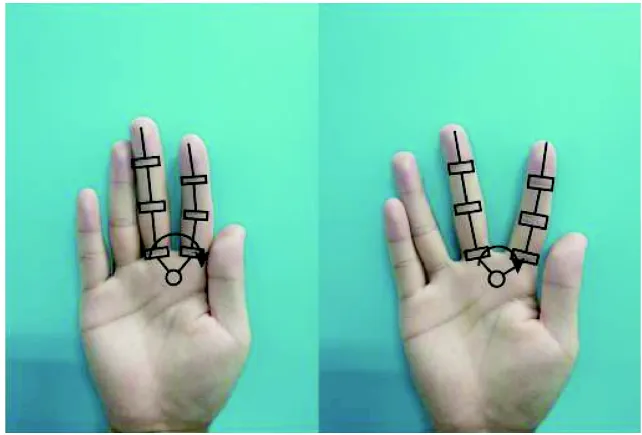
图1 食指与中指动作
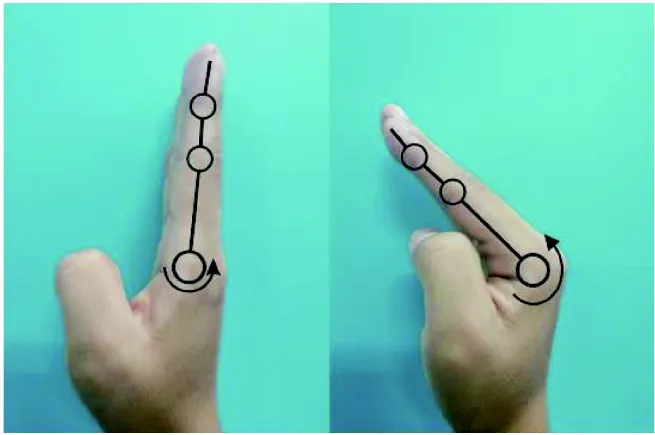
图2 手掌的折叠动作
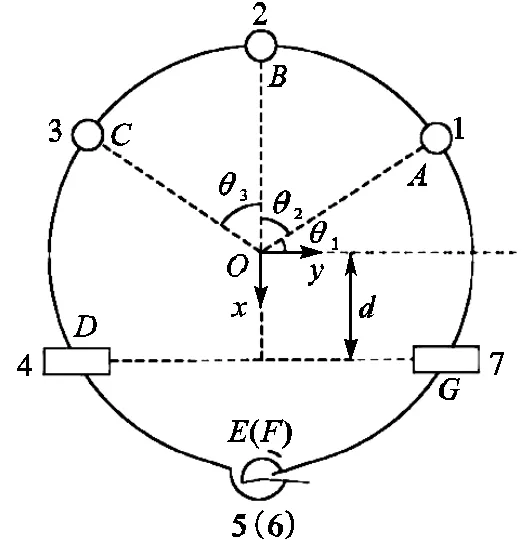
图3 变胞手掌机构示意
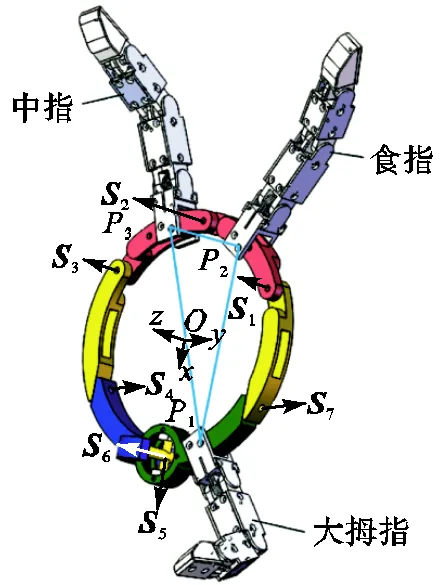
图4 新型变胞手机械三维结构
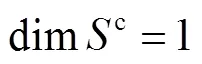
在手掌初始位置时各旋转关节轴线方向如图4所示,由于rT铰链副的可重构特性,关节5、6的轴线方向可由沿轴与轴转换为沿轴与轴,为计算方便,将铰链副处于两种形态时的变胞手掌分别命名为形态变胞手掌与形态变胞手掌.1、2、3、4、5、6、7为变胞手掌各旋转关节的运动旋量,由旋量系分解与基于公共约束和冗余约束的活动度扩展准则可求出变胞手掌在不同位姿下的活动度(坐标系如图4所示).
1.2 变胞手掌的机构分析
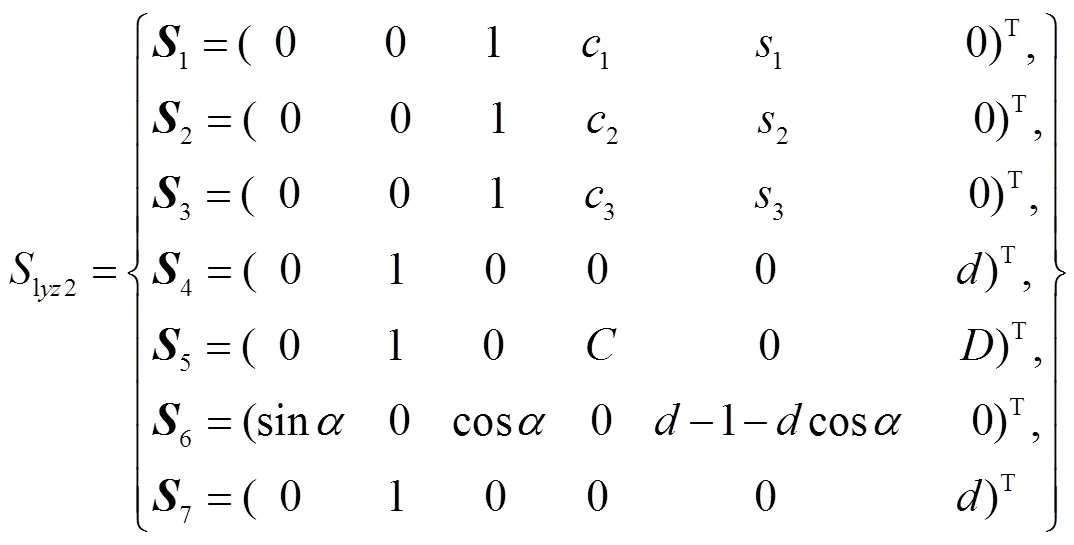
设初始位置时手掌呈完全张开状态,则形态变胞手手掌初始位置时的运动旋量系为

易得此时变胞手掌的约束旋量系为

式中

由活动度计算准则可知,此时
所以机构活动度为

同理,初始位置时形态变胞手掌的运动旋量系为
易得此时变胞手掌的约束旋量系为

所以机构活动度为
可重构虎克铰链副的两种状态下变胞手掌的活动度均为2,其中一种运动模式为旋转关节4和7角度保持不变时的等价平面四杆机构,如图5所示.另一种运动模式为当旋转关节4和7关节轴线共线时杆、绕旋转关节4和7转动的折叠机构,如图6所示.其中1与7分别为旋转关节1和7的驱动角度.
图5 变胞手掌等价平面四杆的运动
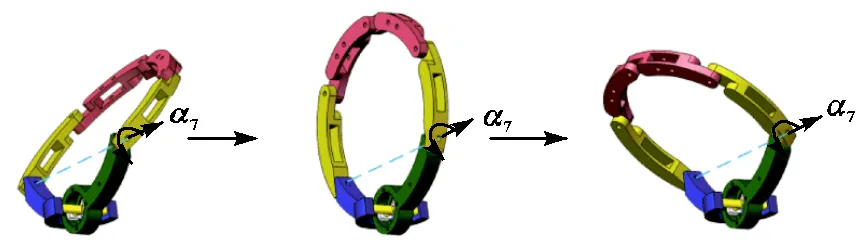
图6 变胞手掌的折叠运动
易得此时变胞手掌的约束旋量系为

此时变胞手掌除图6所示的折叠动作外,仍可实现等价平面四杆的运动,如图7所示.

图7 变胞手掌折叠状态等价平面四杆的运动
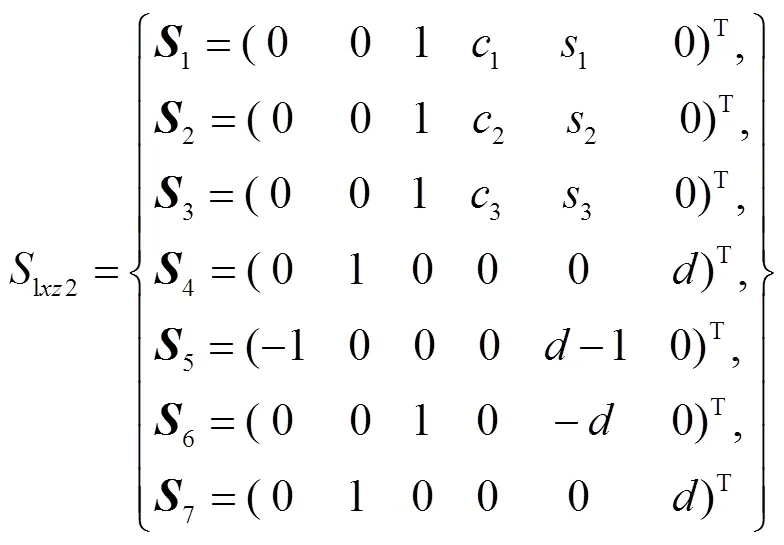
此时形态变胞手掌的运动旋量系为
此时变胞手掌的约束旋量系为

机构活动度为
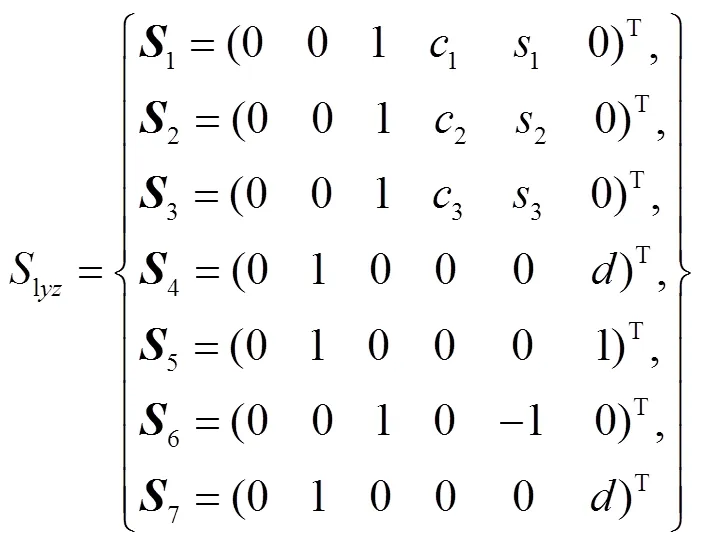
此时变胞手掌除图6所示的折叠动作外,可实现如图8所示的扭折运动,其中杆DE绕旋转关节5进行运动.

此时变胞手掌的约束旋量系为

机构活动度为
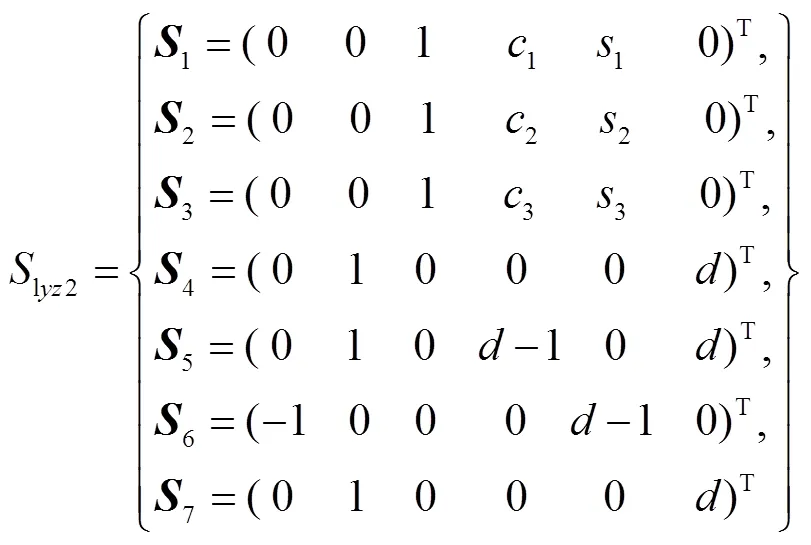
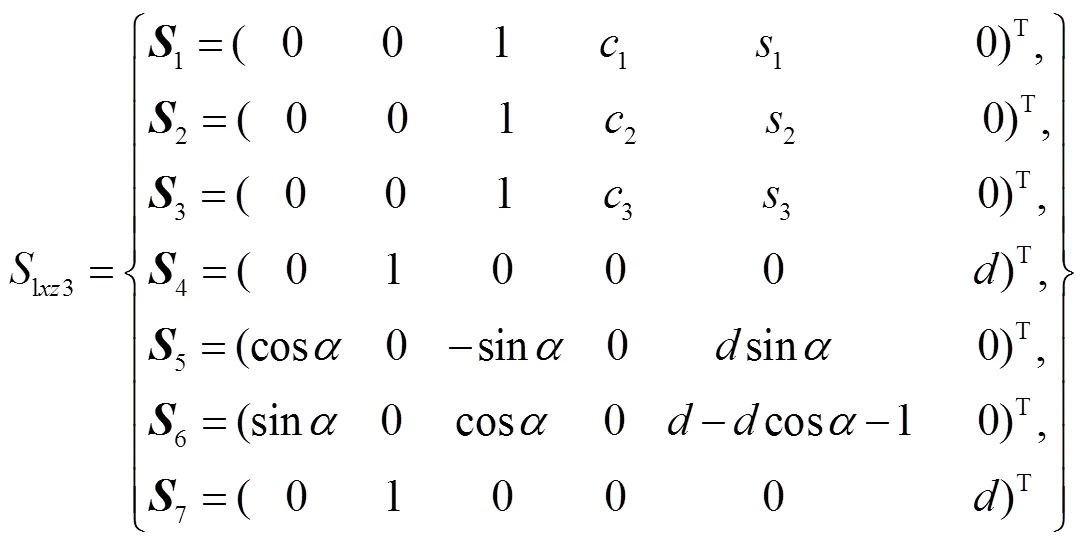
由高阶次分析可得,其中的平面四边形模式运动属于无穷小活动度(瞬时活动高度),因此该机构在当前位形附近只能做如图6所示的折叠运动.此时形态变胞手手掌的运动旋量系为
易得此时变胞手掌的约束旋量系为

所以机构活动度为
综上所述,此新型变胞手手掌的工作模式可分为4种.
(1) 展开手掌等价平面四杆机构(Mode1):即变胞手掌与变胞手掌在平面状态下的运动模式.

如图9所示,变胞手掌的4个形态可分别对应一种人手掌的姿态,人手对与不同尺寸的物体所采用的抓持规划可应用到此新型变胞手上,从而增强对不同物体的抓取适应能力.

图9 变胞手掌仿生动作
2 变胞手掌的工作参数分析
变胞手优于普通机械手的特性就是其手指操作平面和手掌工作参数可以发生变化,从而增大机械手的工作空间和抓取灵活性,因此对于变胞手手指操作平面与手掌工作参数的分析至关重要,本文所分析的机械手手掌采用如表1所示的设计参数.
表1 变胞手掌设计参数

Tab.1 Parameters of the metamorphic palm
2.1 手指操作平面分析
如图10所示,蓝色平面、红色平面、黄色平面分别为大拇指、食指与中指的手指操作平面,其中1、2与3分别为其单位法向量.将3个法向量映射到一个单位球面,进一步研究可得到3个手指操作平面的侧向关联关系,从而完整地描述变胞手手指的姿态.
由图11可知,在Mode1~Mode3中,大拇指的操作平面保持不变,食指与中指的操作平面随驱动关节的变化产生了变化.在Mode4的工作过程中,3个手指的操作平面都随驱动关节角度的变化而产生变化,但食指与中指的操作平面与平面始终保持垂直.
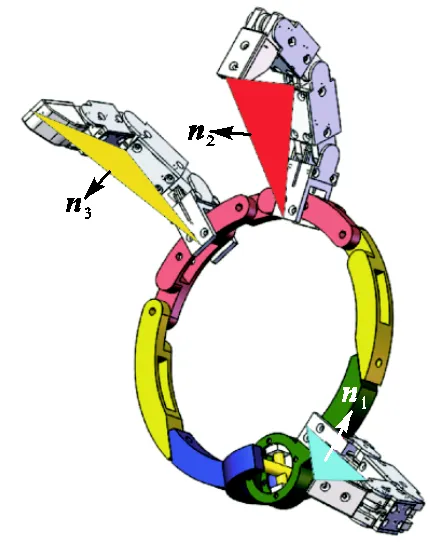
图10 变胞手的手指操作平面及其法向量
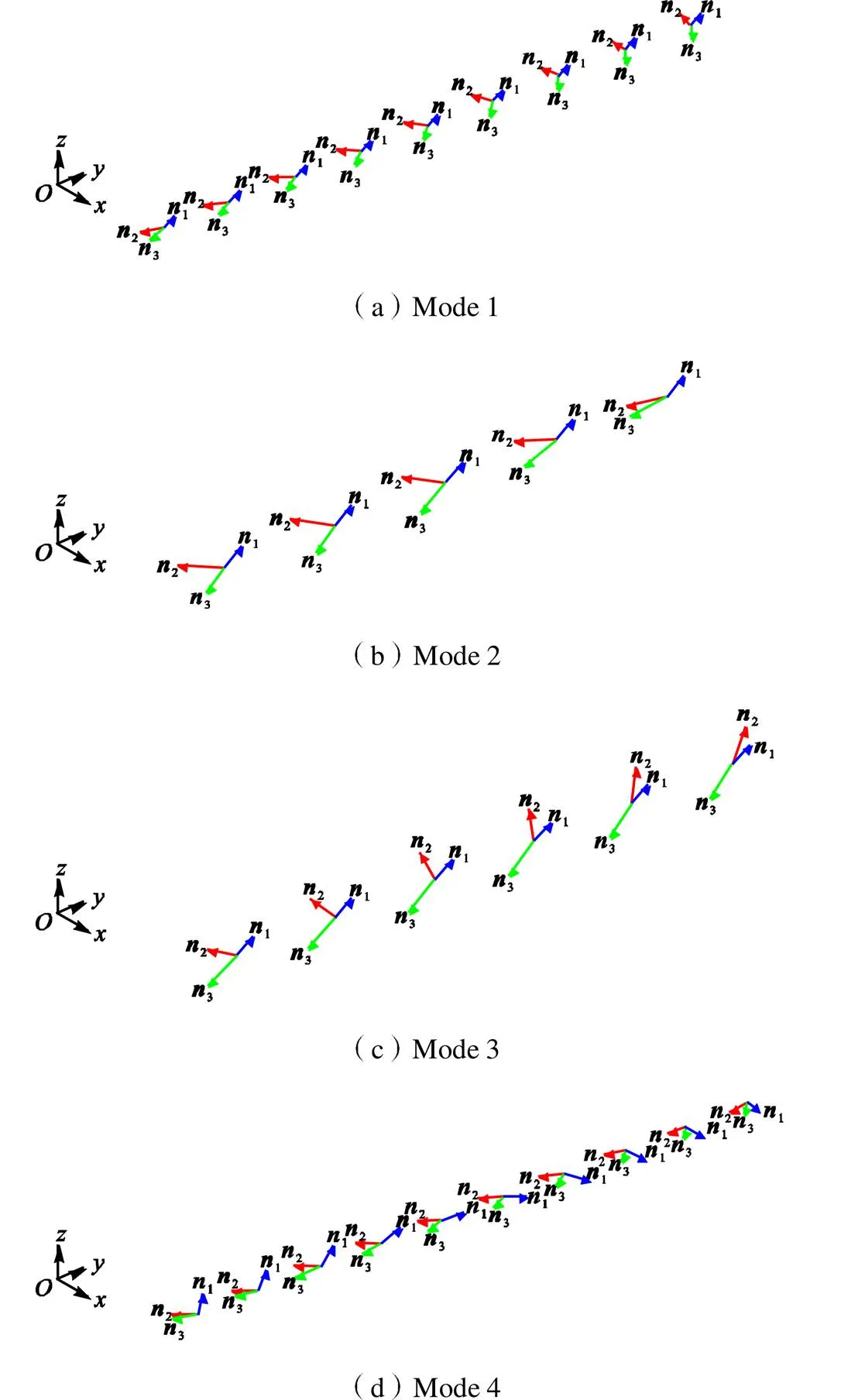
图11 4种工作模式下的手指姿态变化
2.2 手掌工作空间分析
定义手掌工作空间为由1、2、3确定的三角形,手掌工作空间与手掌的操作平面也可由手指安装点1、2和3确定的三角形描述,此三角形随手掌的变形而变化.如图12所示,手掌三角形在变胞手不同的工作模式下会随驱动关节角度变化产生一系列变化.除手掌三角形的面积变化之外,其在空间中的位置与倾角也随工作模式和驱动关节转动而发生变化.
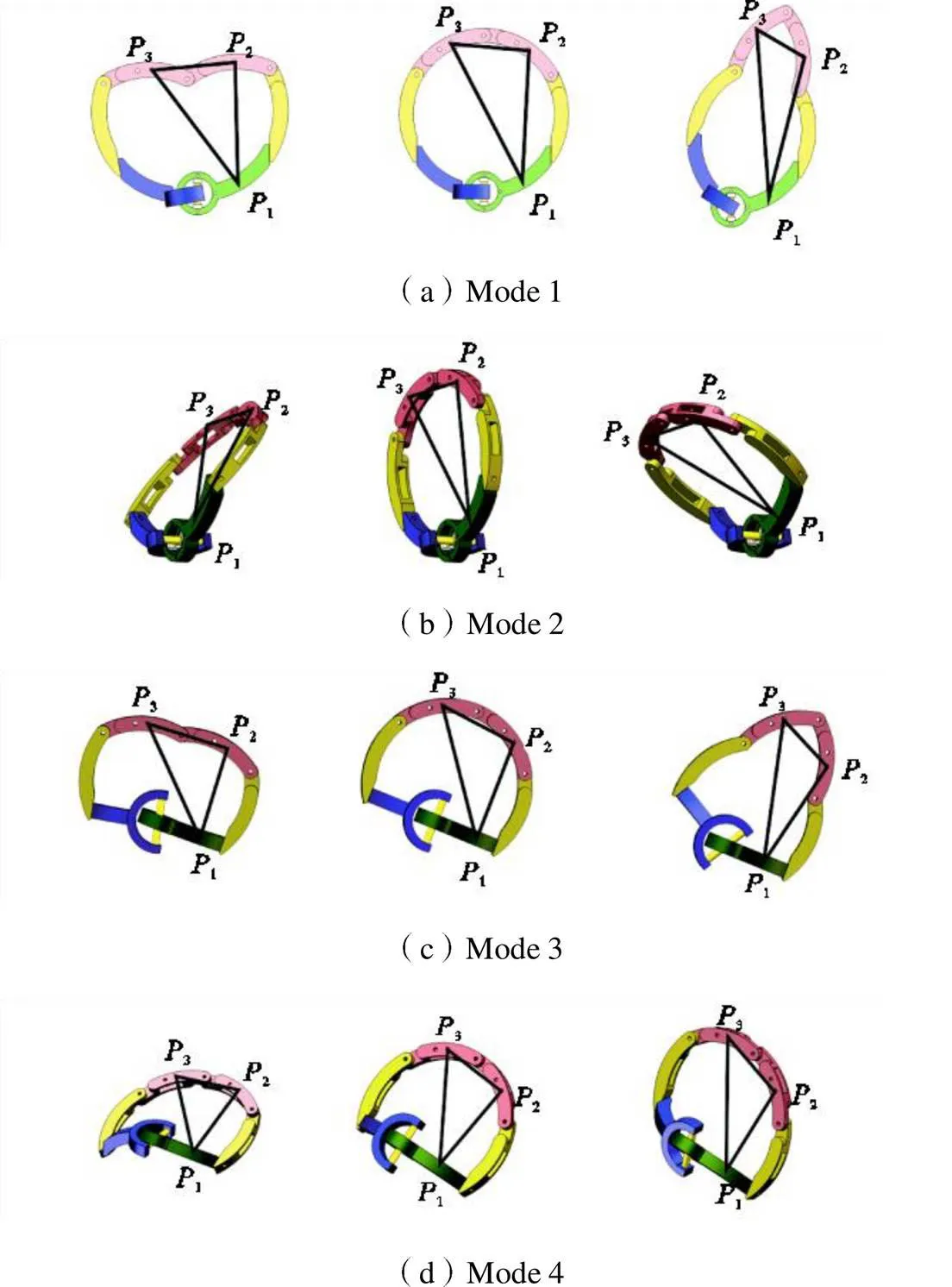
图12 不同工作模式下的手掌三角形变化

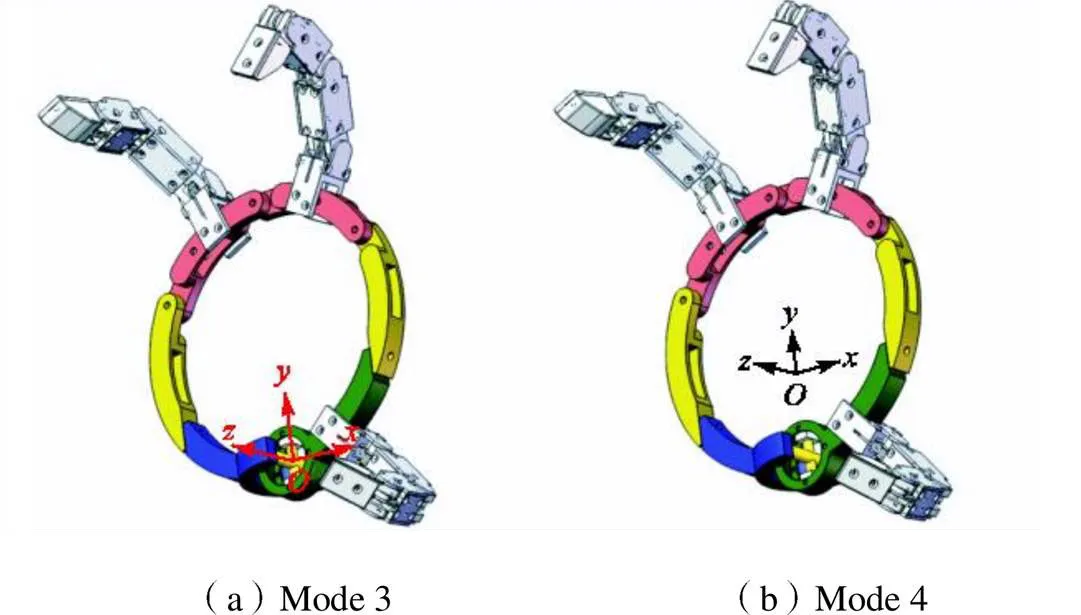
图13 不同工作模式下坐标系示意

表2 驱动角度范围及步长
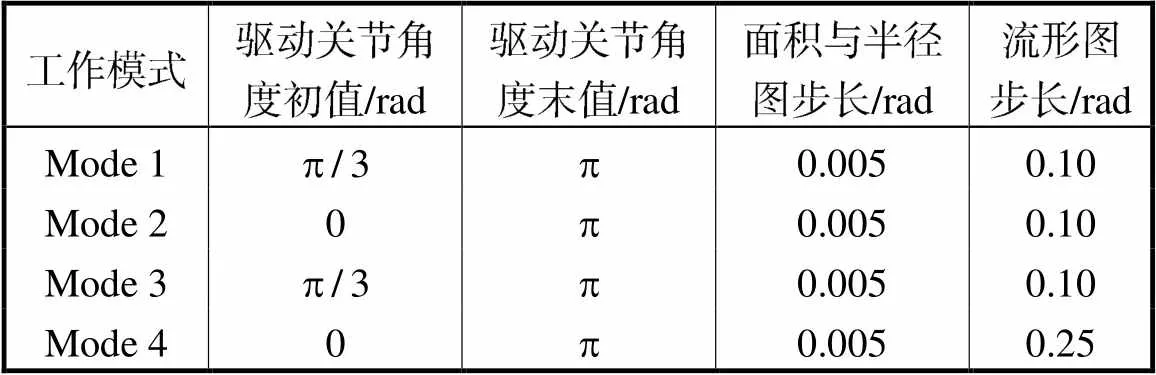
Tab.2 Drivinganglerange and step size
本文的变胞手与普通灵巧手相比,机械手掌的变胞特性可使手指根部在空间中的位置及其等价手掌的半径大小发生变化,对不同尺寸的物体以及具有特异形状物体的抓持可适应性均有了较大提升;而与Dai[14]的球面五杆变胞手相比,此变胞手的手掌三角形外接圆半径可超出初始位置圆的半径,增加对于更大物体的抓持适应性;与Cui等[15]的平面五杆变胞手相比,本变胞手手掌操作平面与平面的较大变化更有利于对物体的抓持.此变胞手的手指操作平面与手掌三角形皆可在工作空间内实现较大变化,其手掌三角形面积的最大值与最小值的比值可达4.3,手掌工作平面与平面的夹角最大可达90°. Borràs等[19]的研究表明,当手掌直径与被抓持物体的直径之差约等于手指长度时,可得到最优的抓持性能.因此,变胞手手掌直径的变化越大,代表其对不同尺寸物体的抓持适应性越强.本变胞手手掌工作三角形的外接圆半径最大可变化38mm左右,对于不同尺寸的物体有良好的抓持适应性.
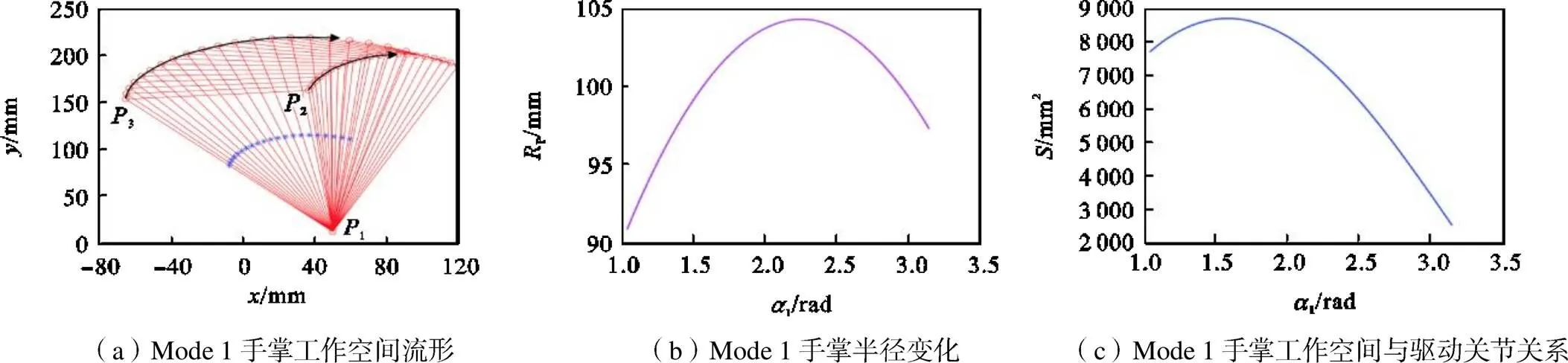
图14 Mode 1手掌三角形的工作参数
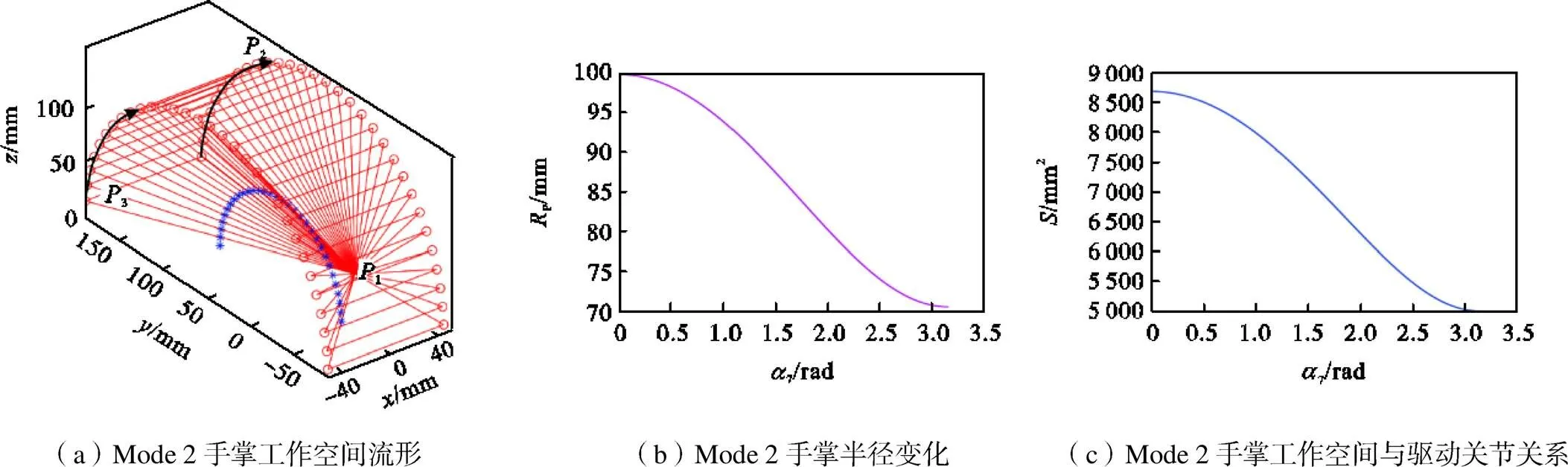
图15 Mode 2手掌三角形的工作参数

图16 Mode 3手掌三角形的工作参数
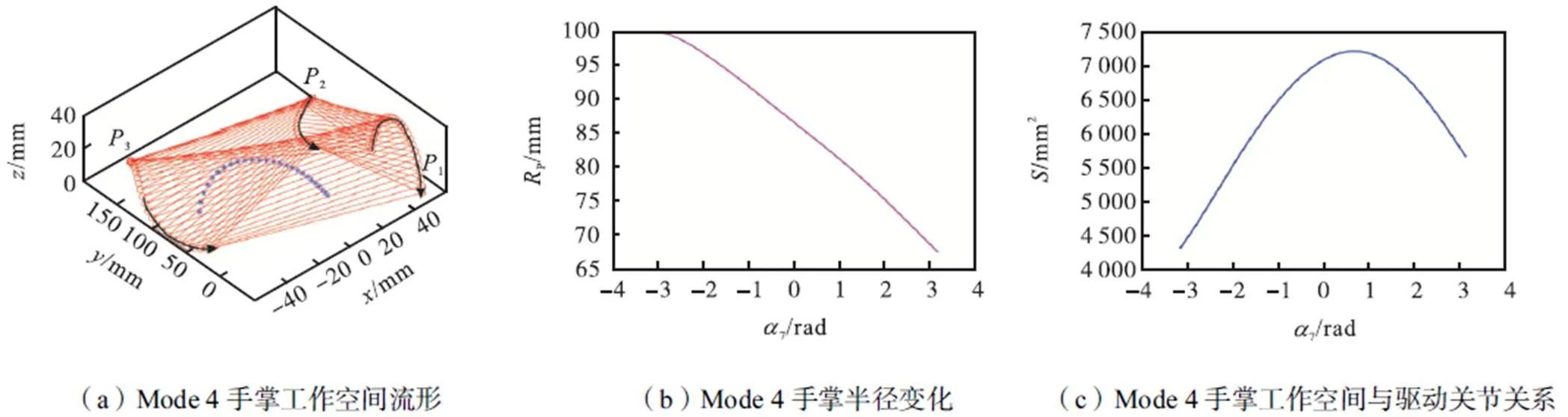
图17 Mode 4手掌三角形的工作参数
表3 变胞手不同工作模式下的工作参数

Tab.3 Working parameters of the metamorphic hand in different working modes
由以上分析可得出以下结论.

(2) Mode2:手掌三角形的最大面积与Mode1相同.手掌三角形面积随驱动关节7的增长而减小.手掌操作平面的较大倾角变化可以帮助机械手抓取不同位置物体,手掌半径的较大变化可适应不同尺寸的物体.
(3) Mode3:手掌三角形最大面积可达7000mm2,其随驱动关节角度的变化与Mode1类似.比起Mode1,此模式下机械手适合抓取较小物体.
(4) Mode4:手掌三角形最大面积与Mode3相同,并随驱动关节7的增长先增大后减小.手掌半径的较大变化可适应不同尺寸的物体,并可实现对物体的捻转操作.
3 结 语
本文提出了一种基于人手动作在手掌上添加转动副以设计新型变胞手的方法,并基于可重构虎克铰链副设计了一款新型仿人变胞手,使其能够模仿人手的部分动作.通过对新型变胞手掌的机构活动度的分析,给出了变胞手掌在两种构态下的4种运动模式.对手掌三角形外接圆半径的分析表明:与传统机械手以及已有的变胞手相比,此变胞手的手掌半径在空间中可产生更大变化,对于不同尺寸物体的抓取适应性更强;手掌工作平面在空间中的倾角变化也有利于机械手抓取不同位置的物体.本文的工作对于仿生变胞机构的设计有借鉴意义,推动了关于对手掌进行仿生设计的研究,其中对于手掌三角形外接圆半径的分析对于未来变胞手性能的初始评估也有一定参考价值.
[1] Salisbury J K,Craig J J. Articulated hands:Force control and kinematic issues[J]. The International Journal of Robotics Research,1982,1(1):4-17.
[2] Mason M. The mechanics of manipulation[C]// 1985 IEEE International Conference on Robotics and AutomationSt Louis,USA,1985:544-548. .
[3] Jacobsen S C,Wood J E,Knutti D F,et al. The UTAH/M. I. T. dextrous hand:Work in progress[J]. The International Journal of Robotics Research,1984,3(4):21-50.
[4] Tomovic R,Boni G. An adaptive artificial hand[J]. IRE Transactions on Automatic Control,1962,7(3):3-10.
[5] Fukaya N,Toyama S,Asfour T,et al. Design of the TUAT/Karlsruhe humanoid hand[C]//2000 IEEE/RSJ International Conference on Intelligent Robots and Systems. Takamatsu,Japan,2000:1754-1759.
[6] Hirzinger G,Landzettel K,Brunner B,et al. DLR’s robotics lab—Recent developments in space robotics [C]// Proceedings of the Artificial Intelligence,Robotics and Automation in Space. Noordwijk,The Netherlands,1999:25-34.
[7] Ueda J,Ishida Y,Kondo M,et al. Development of the NAIST-Hand with vision-based tactile fingertip sensor[C]// Proceedings of the Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Piscataway,USA,2005:2332-2337.
[8] Lotti F,Tiezzi P,Vassura G,et al. UBH 3:An anthropomorphic hand with simplified endo-skeletal structure and soft continuous fingerpads[C]// Proceedings of the IEEE International Conference on Robotics and AutomationNew Orleans,USA,2004:4736-4741.
[9] Zhang Y,Han Z,Zhang H,et al. Design and control of the BUAA four-fingered hand[C]// IEEE International Conference on Robotics and Automation. Seoul,Korea,2001:2517-2522.
[10] 何 平,金明河,刘 宏,等. 机器人多指灵巧手基关节力矩/位置控制系统的研究[J]. 机器人,2002,24(4):314-318,328.
He Ping,Jin Minghe,Liu Hong,et al. Research on the torque/position control system of the base joint of robot multi-fingered smart hand[J]. Robot,2002,24(4):314-318,328(in chinese).
[11] Gao X,Jin M,Jiang L,et al. The HIT/DLR dexterous hand:Work in progress[C]// Proceedings of the 2003 IEEE International Conference on Robotics and Automation. Minneapolis,USA,2003:3164-3168.
[12] Dai J S,Wang D. Geometric analysis and synthesis of the metamorphic robotic hand[J]. Journal of Mechanical Design,2007,129(11):1191-1197.
[13] Dai J S,Wang D,Cui L. Orientation and workspace analysis of the multifingered metamorphic hand—Metahand[J]. IEEE Transactions on Robotics,2009,25(4):942-947.
[14] Dai J S. Robotic Hand with Palm Section Comprising Several Parts Able to Move Relative to Each Other:US,US20120205933[P]. 2012-8-16.
[15] Cui X,Sun J,Zhang X S,et al. A metamorphic hand with coplanar reconfiguration[C]//Proceedings of the 2018 International Conference on Reconfigurable Mechanisms and Robots. Delft,Netherlands,2018:1-7.
[16] 梅江平,薛 娜,刘松涛,等. 一种4 自由度高速并联机械手动态特性分析[J]. 天津大学学报(自然科学与工程技术版),2015,48(12):1083-1092.
Mei Jiangping,Xue Na,Liu Songtao,et al. Dynamic analysis of a 4-DOF high-speed parallel manipulator[J]. Journal of Tianjin University(Science and Technology),2015,48(12):1083-1092(in Chinese).
[17] Jin X,Fang Y,Zhang D,et al. Synthesis of 3-[P][S] parallel mechanism-inspired multimode dexterous hands with parallel finger structure[J]. Journal of Mechanical Design,2020,142(8):083301-1-083301-14.
[18] Gan D,Dai J S,Liao Q. Constraint analysis on mobility change of a novel metamorphic parallel mechanism[J]. Mechanism and Machine Theory,2010,45(12):1864-1876.
[19] Borràs J,Dollar A M. Dimensional synthesis of three-fingered robot hands for maximal precision manipulation workspace[J]. The International Journal of Robotics Research,2015,34(14):1731-1746.
Design and Analysis of a Humanoid Metamorphic Hand Based on Reconfigurable Hooke Joints
Dai Jiansheng1, 2,An Wei1,Wang Ruiqin1,Li Lei1
(1. Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education,Tianjin University,Tianjin 300072,China;2. School of Natural,Mathematical and Engineering Sciences,King’s College London,London WC2R 2LS,UK)
The three-fingered robot hand can imitate the posture of the thumb,index finger,and middle finger of a human hand,thereby realizing the motion of a human hand. The introduction of metamorphic palms further enhances the manipulator’s workspace and grasping adaptability. Focusing on the bionic design of the palm,based on the reconfigurable Hooke joint(rT),a novel metamorphic hand was designed to imitate the motion of real hands,so that the grasping ability of the hand could be enhanced. Because of the reconfigurable characteristic of the rT joint,the palm of the manipulator shows different motion modes in different configurations of the rT joint. The inclination angle between the palm operation plane of the metamorphic hand and theplane and the size of the palm workspace also exhibit different changes. To obtain the maximum operating workspace when the finger length is fixed,the radius of the palm and the object radius are approximately in direct proportion. Thus,the large change in the radius of the manipulator’s palm significantly improves the gripping adaptability. Moreover,the characteristics of the single-degree-of-freedom of the palm in different configurations are conducive to the control of the manipulator and improve its working stability. The mobility of the palm in the two singular positions and its regular positions in the workspace was analyzed,the workspace and the position of the palm working plane of the metamorphic hand in different working modes were calculated,and the change of the inclination angles of the finger operation plane and the radius of the palm was determined. The excellent performance of the novel metamorphic hand was confirmed.
reconfigurable Hooke joint;metamorphic hand;dexterous hand;workspace;mobility
TH128
A
0493-2137(2022)03-0221-09
10.11784/tdxbz202008029
2020-08-12;
2020-08-27.
戴建生(1954— ),男,博士,教授.
戴建生,jian.dai@kcl.ac.uk.
国家自然科学基金资助项目(51535008).
Supported by the National Natural Science Foundation of China(No. 51535008).
(责任编辑:王晓燕)
猜你喜欢
机械科学与技术(2022年8期)2022-08-30
农机使用与维修(2022年7期)2022-07-14
中华养生保健(2022年10期)2022-05-23
昆明医科大学学报(2022年2期)2022-03-29
现代临床医学(2021年5期)2021-11-02
机电工程技术(2021年3期)2021-09-10
广西医科大学学报(2021年4期)2021-05-25
民用飞机设计与研究(2019年2期)2019-08-05
环球时报(2019-07-18)2019-07-18
北京汽车(2019年6期)2019-02-12