一种基于低速、小振幅周期运动CFD数值模拟的水下滑翔机附加质量求解方法
2022-12-01 02:37张连洪张宇航杨绍琼牛文栋侯鹏荣
天津大学学报(自然科学与工程技术版) 2022年3期
张连洪,张宇航,杨绍琼,马 伟,牛文栋,侯鹏荣
一种基于低速、小振幅周期运动CFD数值模拟的水下滑翔机附加质量求解方法
张连洪1, 2, 3,张宇航1,杨绍琼1, 2, 3,马 伟1, 2, 3,牛文栋1, 2, 3,侯鹏荣4
(1. 天津大学机构理论与装备设计教育部重点实验室,天津 300350;2. 天津大学青岛海洋技术研究院,青岛 266237;3. 青岛海洋科学与技术试点国家实验室海洋观测与探测联合实验室,青岛 266237;4. 大连理工大学机械工程学院,大连 116024)

附加质量;水下滑翔机;计算流体动力学;水池试验
水下滑翔机作为一种新型水下航行器,可通过浮力驱动实现多剖面连续滑翔运动,由于其强大的续航能力和较高的隐蔽性,被广泛应用于海洋调查和军事探测等领域[1].随着海洋科学的不断发展,人们对水下滑翔机的滑翔性能以及操纵性能要求越来越高.而附加质量是水下滑翔机水动力重要影响因素之一,因此,人们对附加质量计算精度提出了更高的要求.
Lee等[2]分别采用垂直平面运动机构(vertical plan motion mechanism,VPMM)测试与计算流体动力学(computational fluid dynamics,CFD)方法对水下无人航行器的附加质量进行求解,验证了VPMM设备在水下航行器水池试验中的适用性;周景军等[3]基于相对运动法,利用CFD分别模拟水下航行体进行非定常运动与定常运动,得到流体动力的差值来求解附加质量;杨磊等[4]采用基于势流理论的H-S面元法和基于PMM试验的CFD技术求得水下滑翔机附加质量,并将结果进行对比,相对小于11%;莫慧黠 等[5]基于动参考系思想,避免了相对运动法添加动量源项以及CFD模拟时动网格等问题,附加质量求解误差在10%以内;宋丽华[6]基于有限体积法,求解基本速度势的拉普拉斯方程计算附加值量;刘智丽等[7]将物体在静止来流中的运动问题转换为物体静止而来流时变的计算问题,避免了在CFD中采用动网格技术,同时计算了在黏性流体中椭球体的附加质量;此外,还可以采用细长体假设或切片理论求解附加质量,但只适用于简单三维物体,如细长圆柱等[8-9];对于复杂外形水下航行器可使用拖曳水池试验的方法求解附加质量,但该方法存在费用高、实验周期长等问题.目前,最常用的求解形状复杂的水下航行器附加质量的方法是基于势流理论的H-S面元法和数值模拟平面运动机构PMM试验的CFD方法.其中,PMM试验法主要包括物体的纯升沉运动、纯横荡运动、纯俯仰运动、纯摇艏运动,其难点在于模拟过程涉及到流体流动分离、航行器本体和附体之间的干扰作用等.
水下滑翔机依靠机翼提供的升力实现锯齿形剖面运动,依靠尾舵实现其滑翔的滑翔稳定性[10-11].在进行PMM试验时,机翼会产生较大的流动分离现象.因此本文提出了一种采用CFD技术模拟水下滑翔机低速、小振幅周期运动的试验方法,以减小机翼与流体的相互作用.同时,本文采用基于势流理论的H-S面元法编写了附加质量计算程序,用以验证CFD方法的准确性.此外,通过对水下滑翔机等比例模型进行水池试验,将得到的结果与CFD数值模拟的结果进行对比,以验证这种方法的可行性.
1 附加质量求解原理

1.1 研究对象
本文研究对象为天津大学自主研发的海燕-L长航程水下滑翔机,如图1所示.海燕-L主要由耐压舱、机翼、前后导流罩和天线构成.耐压舱内部包括浮力调节系统、姿态调节系统、控制系统、通信和导航系统等[13].表1为海燕-L的主要特征参数.

图1 海燕-L水下滑翔机
表1 海燕-L主要特征参数

Tab.1 Main characteristic parameters of Petrel-L


图2 海燕-L体坐标系
1.2 求解原理
采用空间固定坐标系,平面为竖直面,轴根据右手定则垂直于竖直面方向.设定海燕-L在流体域中沿、、轴同时进行低速度、小振幅的周期性升沉和横荡运动.图3为水下滑翔机运动轨迹放大后的示意图,实际模拟过程中振幅很小.
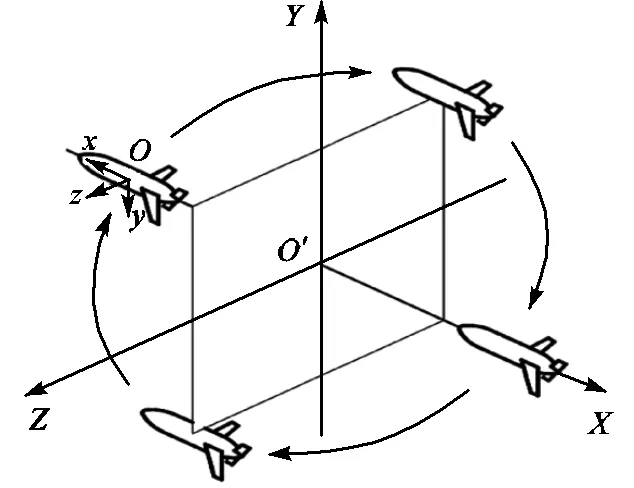
图3 海燕-L运动轨迹示意
海燕-L运动方程为

则加速度为
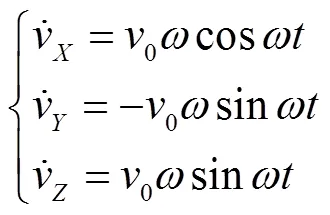



将式(1)、式(2)代入式(3),可得


在相同流体域中,分别使水下滑翔机绕体坐标系的、、轴做纯摇艏运动.设定水下滑翔机运动方程为

将式(6)代入式(7),可得



2 利用CFD计算水下滑翔机附加质量
2.1 CFD模型建立
本文采用CFD商用软件STAR-CCM+对水下滑翔机低速、小振幅周期运动进行模拟.STAR-CCM+具有强大的网格支持能力,支持动网格、滑移网格以及重叠网格等.其中,重叠网格综合了滑移网格与动网格的优点,既能够很好地描述部件运动,又能够保证物体运动过程中的网格质量,可以对任意不规则运动的物体进行求解.因此本文采用重叠网格技术对水下滑翔机运动进行模拟.
本算例需要建立两个流体域,如图4所示,分别对这两个域划分网格,即组件网格和背景网格.其中,组件网格为任意长方体与其内部水下滑翔机外表面之间区域的网格(该网格可由长方体域与内部水下滑翔机进行布尔减运算得到,长方体尺寸略大于水下滑翔机整体尺寸),背景网格为流体域网格,长度为3(2.6m),宽、高分别为1.5.本文将流体域划分为切割体网格单元.
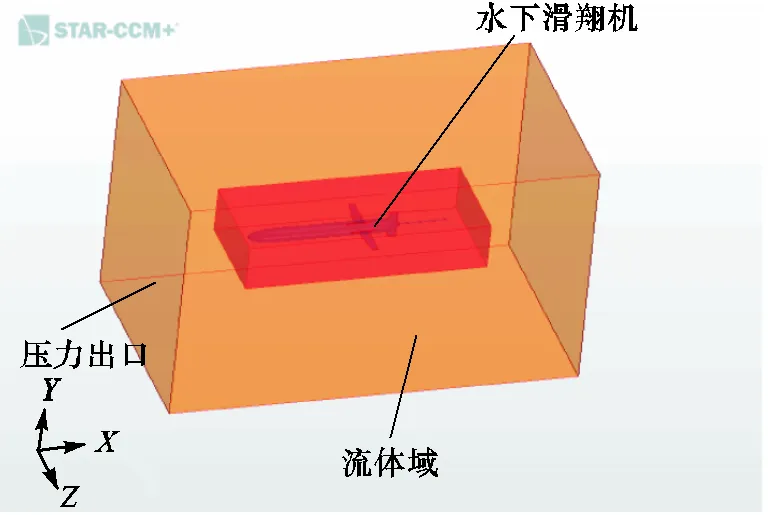
图4 边界条件
根据第1.2节所述方法,模拟水下滑翔机进行低速小振幅运动,监控水下滑翔机所受水动力和力矩,即可得到水下滑翔机的8个附加质量.
2.2 网格数量与计算步长设置
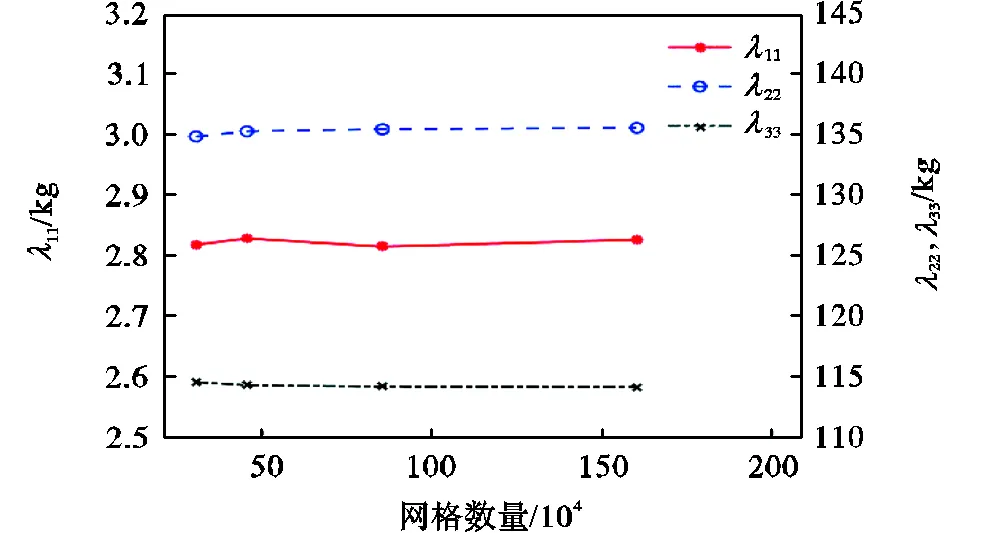
图5 网格数量设置
可以看出,不同网格数量对计算结果的影响不大,附加质量上下波动可能与计算步长的选取有关.为使附加质量结果达到一定精度,并节省计算资源,本文进行仿真时采用85×104的网格数量.
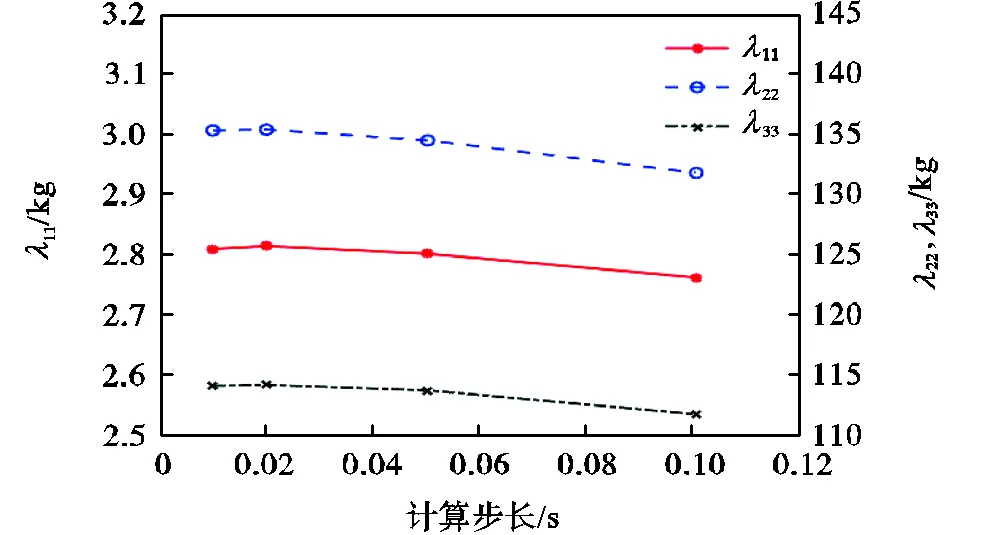
图6 计算步长设置
可以看出当计算步长减小为0.02s,即一个周期计算200次时,计算结果已经不再随着计算步长的减小而发生明显的变化.为节省计算资源,提高附加质量计算效率,本文采用计算步长0.02s计算水下滑翔机附加质量,此时能够达到很高的精度.
2.3 速度、振幅影响分析
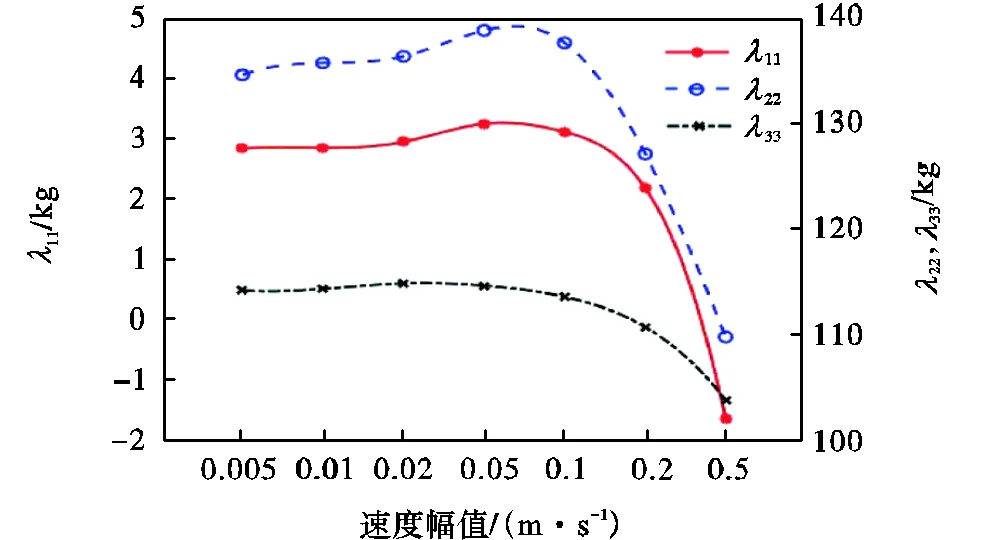
图7 速度幅值与附加质量的关系
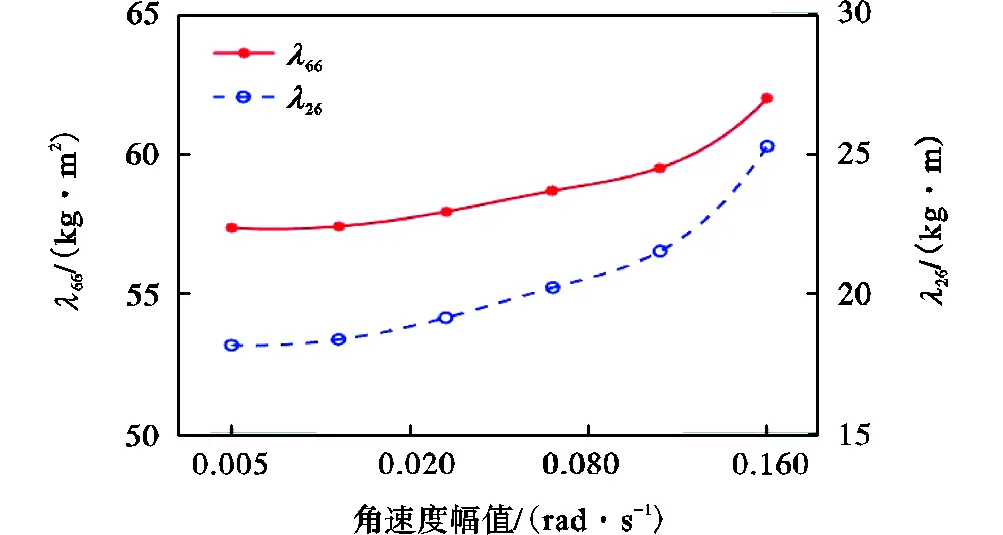
图8 角速度幅值与附加质量的关系
2.4 计算结果
本文最终使用网格数为85×104的模型,计算步长为0.02s,对水下滑翔机低速、小振幅周期运动进行数值模拟,速度幅值设置为0.01m/s,角速度幅值设置为0.005rad/s,得到水下滑翔机8个附加质量值如表2所示.
表2 基于CFD的附加质量计算值
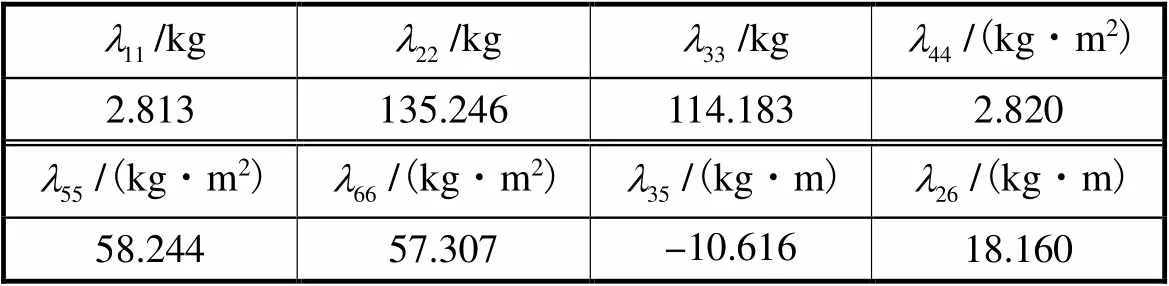
Tab.2 Value of additionalmassbased on CFD
3 结果验证及分析
3.1 基于H-S面元法的水下滑翔机附加质量计算
H-S面元法是基于势流理论,采用分布奇点法来求解物体附加质量的,所针对的是物体在没有黏性、不可压缩的无旋流体中的运动问题[13].
假设物体在静止的理想流体中以速度作非定常直线运动,则速度势满足控制方程为

边界条件为

由势流理论可知,流场内任意点的速度势为
将式(13)两端取法相导数,带入式(12)可以得到


则物体的附加质量为

本文基于上述方法使用Matlab编写了水下滑翔机附加质量计算程序.与CFD数值模拟法不同的是,CFD方法是对流体域进行体网格划分,而H-S面元法是对水下滑翔机进行表面网格划分.考虑到划分网格时边长相同的四边形面元较三角形面元会节省大量计算资源,而三角形面元相比四边形面元更能贴合物体表面,因此本文采用四边形占优来划分网格.本文编写的程序能兼容三角形和四边形两种形状面元,从而达到既贴合物体表面又能节省计算资源的目的.
水下滑翔机三维模型的坐标原点位置应与浮心重合.使用workbench的mesh模块对水下滑翔机表面进行网格划分,如图9所示,最小网格尺寸为15mm,表面网格数量为17293.
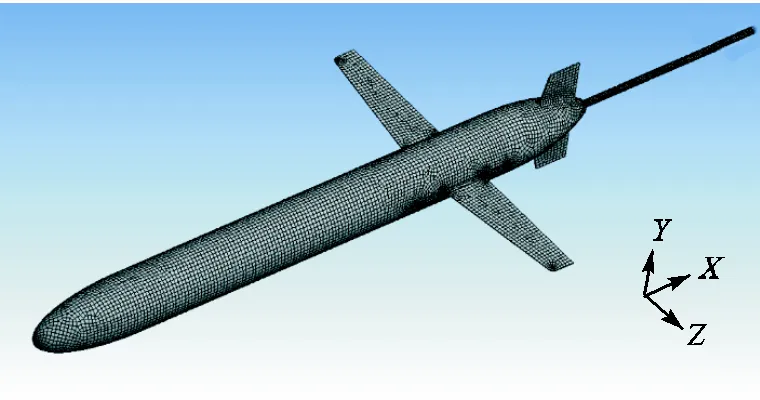
图9 Petrel-L表面网格
将软件输出的网格文件导入程序,即可得到海燕-L水下滑翔机的附加质量.
3.2 水池试验
本文针对海燕-L水下滑翔机进行了水池试验,以验证上述CFD数值模拟方法的可行性.
试验地点为哈尔滨工程大学,试验设备采用水平型循环水槽,它与普通水池有所不同,被测试的模型没有前进速度,而周围流场是持续运动的,因此试验时间不受场地限制,可实现长时间的自动化测量,极大缩减了试验周期和成本.
长航程水下滑翔机的水池试验主要通过力天平测力传感器,在循环水槽的均匀流场中,使用平面运动机构(PMM)驱动水下滑翔机做指定方式的运动. 试验过程包括水平面定长变漂角六分力测量、水平面纯摇艏简谐运动六分力测量、水平面纯横荡简谐运动六分力测量、垂直面定常变攻角六分力测量、重直面纯俯仰简谐运动六分力测量以及垂直面纯升沉简谐运动六分力测量.同时,采集水下滑翔机运动过程中所受的力和力矩,绘制并拟合受力曲线,求取水下滑翔机附加质量.图10为水下滑翔机模型的加工与装配图.图11为试验过程.

图10 海燕-L模型加工与装配

图11 试验过程
3.3 结果与分析

表3 试验结果

Tab.3 Experimental results

(1) 如图11(a)所示,天平支撑杆与滑翔机壳体连接处存在较大缝隙,在进行水池试验时会产生较大的内流场;
(2) 受到航道尺度的限制,水下滑翔机纯升沉简谐运动受到边界的干扰较为严重;
(3) 水下滑翔机机翼材质为碳纤维,在进行纯升沉简谐运动时机翼会发生较大的抖动.
4 结 语
本文以海燕-L水下滑翔机为研究对象,提出了一种采用CFD数值模拟法求解水下滑翔机附加质量的新方法,该方法只需要建模一次,在同一个流体域中模拟水下滑翔机的4种运动方式,监控其所受的水动力和力矩,即可得到海燕-L的8个附加质量,相比文献[4]中所述的基于PMM试验的CFD方法,极大提高了附加质量求解效率.同时,本文采用基于势流理论的H-S面元法,对海燕-L水下滑翔机的附加质量进行求解,得到两种方法计算结果较为一致,相对误差基本可以控制在5%以内.最后,本文通过水池试验对等比例水下滑翔机模型进行试验验证,相对误差基本可以控制在6%以内,可以看出本文提出的CFD方法具有较高的可行性和准确性.由于水池试验对试验设备的要求较高,且费用高、周期长,因此,该CFD数值模拟方法可以在一定程度上代替水池试验对水下滑翔机附加质量进行求解,且该方法能适用于任意尺寸、形状的水下滑翔机,对不同型号水下滑翔机水动力外形设计、动力学建模都具有较大的参考价值.
[1] 何柏岩,杜金辉,杨绍琼,等. 基于VMD-LSSVM的水下滑翔机深平均流预测[J]. 天津大学学报(自然科学与工程技术版),2021,54(4):388-396.
He Baiyan,Du Jinhui,Yang Shaoqiong,et al. Prediction of underwater glider depth-averaged current velocity based on VMD-LSSVM[J]. Journal of Tianjin University(Science and Technology),2021,54(4):388-396(in Chinese).
[2] Lee S K,Joung T H,Cheon S J,et al. Evaluation of the added mass for a spheroid-type unmanned underwater vehicle by vertical planar motion mechanism test[J]. International Journal of Naval Architecture and Ocean Engineering,2011,3(3):174-180.
[3] 周景军,李育英,项庆睿. 一种水下航行体附加质量数值计算方法[J]. 鱼雷技术,2013,21(4):246-249.
Zhou Jingjun,Li Yuying,Xiang Qingrui. A numerical computation method of additional mass for underwater vehicle[J]. Torpedo Technology,2013,21(4):246-249(in Chinese).
[4] 杨 磊,曹军军,姚宝恒,等. 水下滑翔机附加质量数值计算[J]. 舰船科学技术,2016,38(23):116-120.
Yang Lei,Cao Junjun,Yao Baoheng,et al. Numerical calculation of additional mass of underwater glider[J]. Ship Science and Technology,2016,38(23):116-120(in Chinese).
[5] 莫慧黠,党建军,罗 凯,等. 水下航行器附加质量数值计算方法[J]. 水下无人系统学报,2017,25(4):250-255.
Mo Huixia,Dang Jianjun,Luo Kai,et al. Numerical calculation method of additional mass of underwater vehicle[J]. Journal of Underwater Unmanned Systems,2017,25(4):250-255(in Chinese).
[6] 宋丽华. 水下航行体附加质量的计算方法[J]. 水雷战与舰船防护,2017,25(4):58-61,54.
Song Lihua. Calculation method of additional mass of underwater vehicle[J]. Mine Warfare and Ship Protection,2017,25(4):58-61,54(in Chinese).
[7] 刘智丽,林献武. 有黏流场中旋成椭球体的轴向附加质量系数计算[J]. 厦门大学学报(自然科学版),2019,58(3):408-414.
Liu Zhili,Lin Xianwu. Calculation of axial additional mass coefficient of rotating ellipsoid in viscous flow field[J]. Journal of Xiamen University(Natural Science Edition),2019,58(3):408-414(in Chinese).
[8] Wang K,Zhang X,Zhang Z Q,et al. Numercal analysis of added mass and damping of floating production,storage and offloading system[J]. Acta Mechanica Sinica,2012,28(3):870-876.
[9] Jensen R L,Watts P B,Lawrence J E,et al. Vertical hand force and forearm emg during a high-step rock-on climbing move with and without added mass[C]// Proceedings of 23rd International Symposium on Biomechanics in Sports. Beijing,China,2005:466-469.
[10]沈新蕊,王延辉,杨绍琼,等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报,2018,26(2):89-106.
Shen Xinrui,Wang Yanhui,Yang Shaoqiong,et al. Development of underwater gliders:An overview and prospect [J]. Journal of Unmanned Undersea Systems,2018,26(2):89-106(in Chinese).
[11]张 亮,李云波. 流体力学[M]. 哈尔滨:哈尔滨工程大学出版社,2001.
Zhang Liang,Li Yunbo. Fluid Mechanics[M]. Harbin:Harbin Engineering University Press,2001(in Chinese).
[12] Yang Ming,Wang Yanhui,Wang Shuxin,et al. Motion parameter optimization for gliding strategy analysis of underwater gliders[J]. Ocean Engineering,2019,191:106502-1-106502-12.
[13]戴遗山,段文洋. 船舶在波浪中运动的势流理论[M]. 北京:国防工业出版社,2008.
Dai Yishan,Duan Wenyang. The Potential Flow Theory of Ship Moving in Waves[M]. Beijing:National Defense Industry Press,2008(in Chinese).
Method for Solving Added Mass of Underwater Glider Based on CFD of Low-Speed and Small-Amplitude Periodic Motion
Zhang Lianhong1, 2, 3,Zhang Yuhang1,Yang Shaoqiong1, 2, 3,Ma Wei1, 2, 3,Niu Wendong1, 2, 3,Hou Pengrong4
(1. Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education,Tianjin University,Tianjin 300350,China;2. Qingdao Institute for Ocean Engineering of Tianjin University,Qingdao 266237,China;3. The Joint Laboratory of Ocean Observing and Detection,Pilot National Laboratory for Marine Science and Technology(Qingdao),Qingdao 266237,China;4. School of Mechanical Engineering,Dalian University of Technology,Dalian 116024,China)
added mass;underwater glider;computational fluid dynamics(CFD);pool test
U674.941
A
0493-2137(2022)03-0239-08
10.11784/tdxbz202010039
2020-10-21;
2020-11-07.
张连洪(1963— ),男,博士,教授,zhanglh@tju.edu.cn.
马 伟,wei.ma@tju.edu.cn.
国家重点研发计划资助项目(2019YFC0311803,2019YFC0311701);国家自然科学基金资助项目(11902219);天津市自然科学基金资助项目(18JCJQJC46400).
Supported by the National Key Research and Development Program of China(No.2019YFC0311803,No.2019YFC0311701),the National Natural Science Foundation of China(No.11902219),the Natural Science Foundation of Tianjin,China (No.18JCJQJC46400).
(责任编辑:王晓燕)
猜你喜欢
军事文摘(2021年16期)2021-11-05
知识就是力量(2019年7期)2019-07-01
小资CHIC!ELEGANCE(2018年24期)2018-08-13
新少年(2018年3期)2018-07-07
校园英语·下旬(2016年12期)2017-03-31
小学生导刊(低年级)(2016年11期)2016-11-14
特别文摘(2016年8期)2016-05-04
特别文摘(2016年8期)2016-05-04
课堂内外(小学版)(2016年3期)2016-04-05
家教世界·创新阅读(2009年11期)2009-04-19