
大口径主焦点式光学系统的设计与装调
2023-01-06 14:58姜晰文赵金宇吕天宇安其昌姜海波
光学精密工程 2022年23期
姜晰文,赵金宇,吕天宇,邵 亮,安其昌,郭 鹏,姜海波
(中国科学院长春光学精密机械与物理研究所吉林省智能波前传感与控制重点实验室,吉林 长春 130033)
1 引 言
主焦点式光学系统仅包含主反射镜一块反射光学元件,光能损失小、结构简单。在主反射镜焦点前加入若干透镜组成校正镜组,能够增大视场,校正像差,提高像质。相比其他结构形式的望远镜光学系统,主焦点式系统中校正镜组口径相对较小,中心遮拦小,光能量损失小。
为实现更高的集光能力与分辨力,望远镜光学系统的口径不断增大。目前,国内最大的单体主反射镜由中国科学院长春光机所研制,口径达4 m[1]。日本国家天文台在美国建造的光学Subaru 望远镜主镜口径达8.2 m[2]。大型巡天望远镜GMT、LSST 主镜口径均在8 m 以上[3]。随着光学元件口径的增大,系统装调难度也随之提高,主焦点式光学系统的装调需考虑主反射镜的面形精度控制、主反射镜与校正镜组的相对位置控制以及校正镜组内部透镜间的倾斜、间隔控制等环节[4-9]。
Subaru 望远镜的主镜口径为8.2 m,主镜采用薄镜面技术,厚度仅有20 cm,通过多个促动器保持面形,望远镜的主焦点系统用于实现广域观测,由116 个CCD 组成了8.7 亿像素的超宽视场相机[2]。长春光机所的研究团队针对口680 mm主焦点光学系统开展了机械结构轻量化设计、光机装调等研究[9-11]。目前,大口径主焦点光学系统的研究均围绕系统的机械结构设计展开,光学系统设计与分析等方面的内容鲜有提及。另外,关于大口径主焦点系统光学装调方面的研究也不全面,缺少通用、详细的装调方法。因此,本文针对某1 m 口径主焦点望远镜的光学系统,根据设计要求展开了详细的光学设计、分析及像质评价,并提出了适用于大口径主焦点式光学系统的一般装调方法。
2 光学系统设计
主焦点式光学系统的主要设计参数如表1所示。

表1 主焦点光学系统的设计要求Tab.1 Design requirement for prime-focus optical system
针对设计要求,结合主焦点式光学系统的特点进行该光学系统的具体设计、像质评价、热分析及公差分析。选择合适的初始结构,在此基础上缩放焦距,调整口径,设置基本参数。添加必要的控制操作数,设置曲率、空气间隔、镜片厚度和材料等为变量,根据需要增加透镜,增加变量数,不断调整优化,直至像质满足要求。完成系统主镜抛物面,及校正镜组六片球面透镜的设计,光学系统结构如图1 所示。
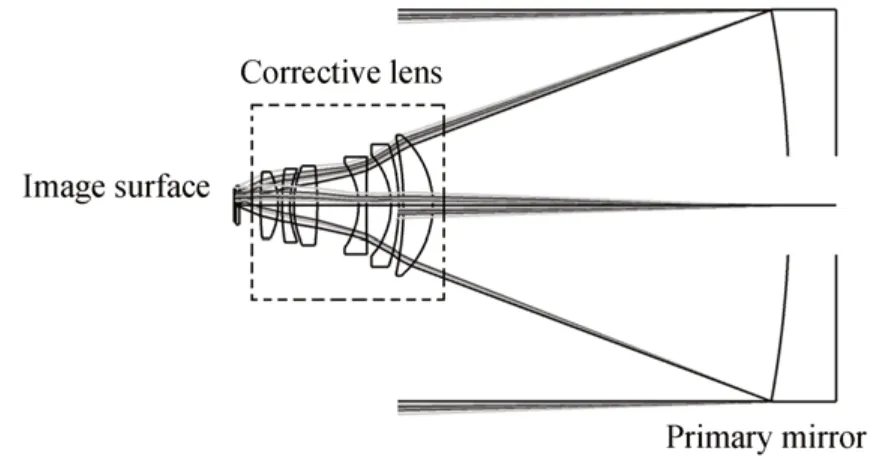
图1 主焦点式光学系统结构Fig.1 Structure diagram of prime-focus optical system
针对该设计展开系统的像质评价,20 ℃时,该系统在奈奎斯特频率下(50 lp/mm),2.7°×2.7°(对角线视场3.82°)视场的调制传递函数(Modulation Transfer Function,MTF)均 大 于0.5,如图2 所示。
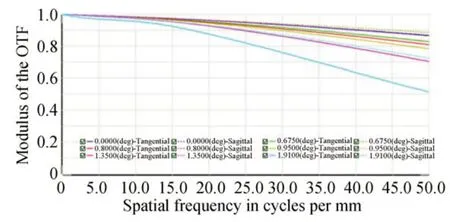
图2 20 ℃时光学系统的MTF 曲线Fig.2 MTF curve of optical system at 20 ℃
当环境温度变化时,热变形会导致光学系统的成像质量下降,因此需要对系统进行温度补偿。对系统进行热分析得知,单独采用后截距移动补偿便能够校正像质变化。系统采用步进电机、直线导轨移动探测器的方式实现系统的实时温度补偿。装调过程对探测器的俯仰、方位两个维度的离焦加以控制,保证了探测器移动过程中的补偿精度。经计算,像面移动的补偿范围为-0.24~+0.48 mm,以15 ℃为梯度,不同温度的补偿量见表2。
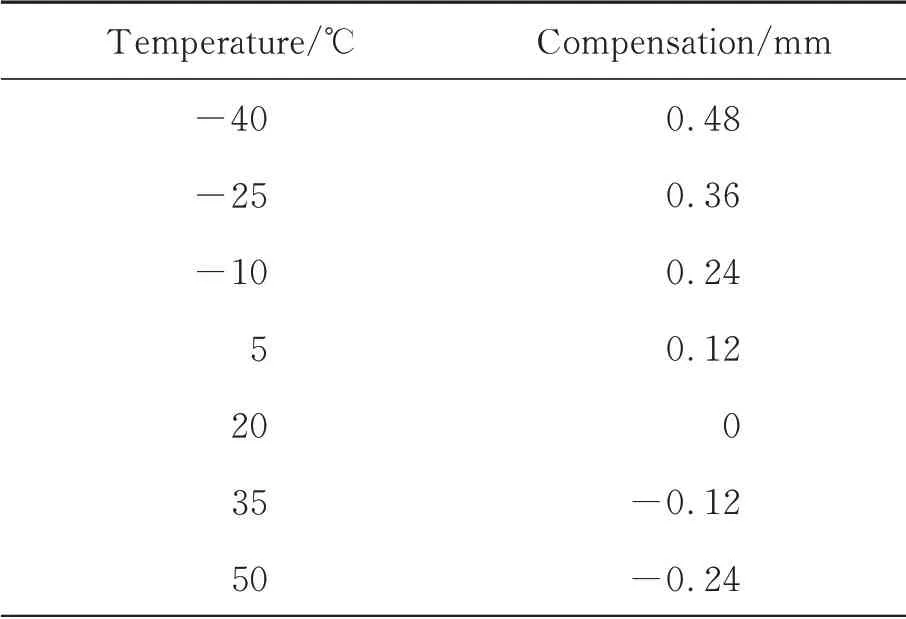
表2 光学系统的补偿量Tab.2 Compensating distance value of optical system
补偿后-40,50 ℃时光学系统的MTF 曲线如图3 所示。由图可知,在-40~50 ℃内,光学系统的MTF 曲线全视场在50 lp/mm 处均高于0.45,实现了系统像质的补偿。
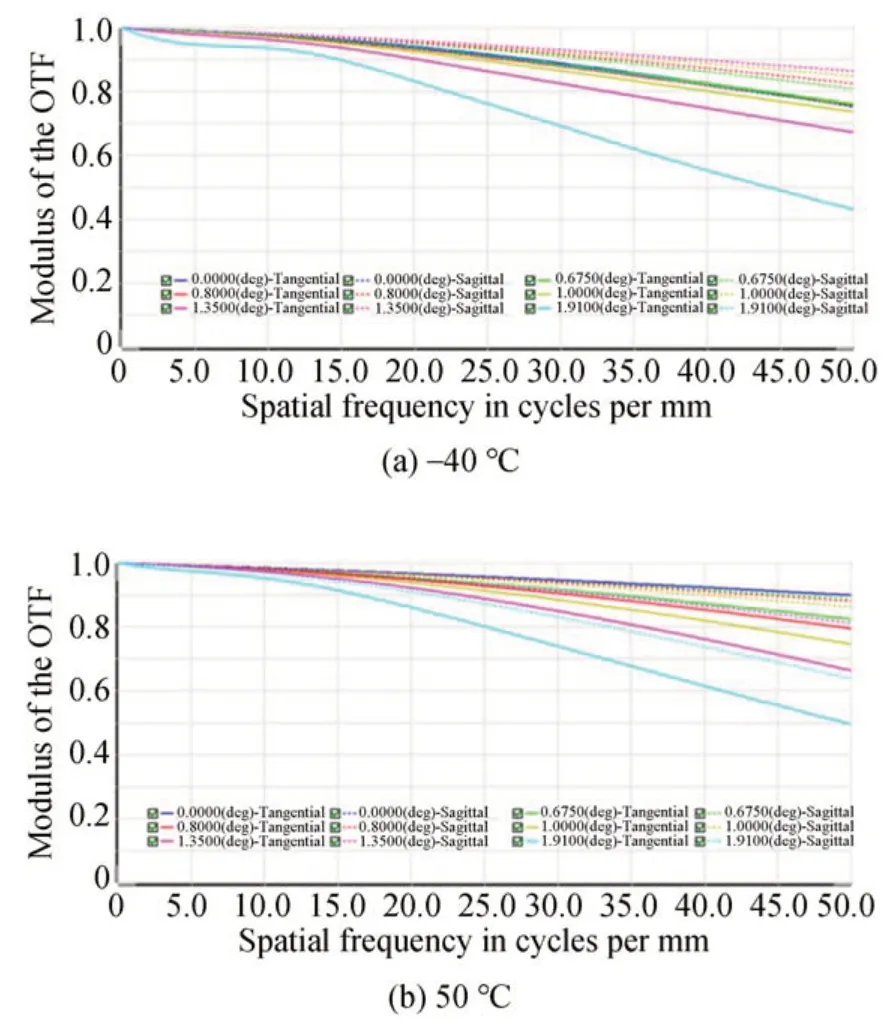
图3 不同温度下光学系统的MTF 曲线Fig.3 MTF curves of optical system at different temperatures
系统在20 ℃的点列图如图4 所示,在全视场2.7°×2.7°(对角线视场为3.82°)内最大弥散斑半 径(RMS)小 于9 μm,其 中(0°,0°),(0°,0.675°),(0°,0.8°),(0°,0.950°),(0°,1.35°),(0°,1.91°)各视场的弥散斑半径(RMS)分别为2.361,2.847,3.054,3.366,4.737,8.726 μm。
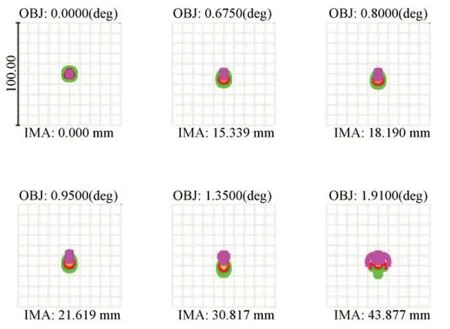
图4 点列图Fig.4 Spot diagram
系统在20 ℃全视场2.7°×2.7°(对角线视场3.82°)内的80%能量集中度小于6 μm(小于2×2 像元),如图5 所示。

图5 能量集中度曲线Fig.5 FFT diffraction encircled energy
光学系统畸变在2.7°×2.7°(对角线视场为3.82°)视场内小于1.3%,最大畸变出现在边缘视场(对角线视场)处,值为1.206 8%,网格畸变如图6 所示。
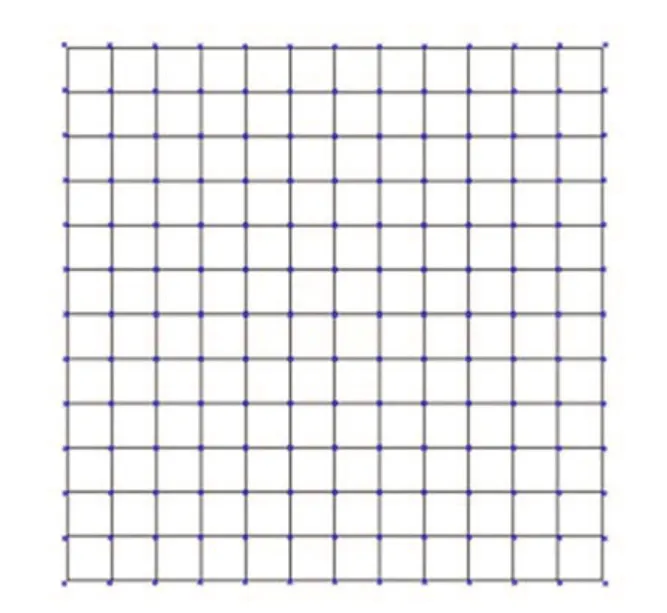
图6 网格畸变Fig.6 Grid distortion
运用光学设计软件中公差计算与分析程序,为系统中主反射镜与六片透镜的各项公差参数分配初始值。公差参数包括:折射率、阿贝数、玻璃不均匀性、半径、二次系数公差、光学元件厚度、空气间隔、加工偏心、加工倾斜、装调偏心和装调倾斜等。选择系统50 lp/mm 处的传递函数作为像质评价标准,并以后截距作为调整参数。利用灵敏度分析、反灵敏度分析及蒙特卡洛分析等方法分析各项初始公差对系统性能下降的敏感度,对敏感参数进行公差收紧,对非敏感参数进行公差放松,连续调整,最终获得合理的公差分配及光学系统性能的预算结果。表3 为光学系统最终的公差要求。
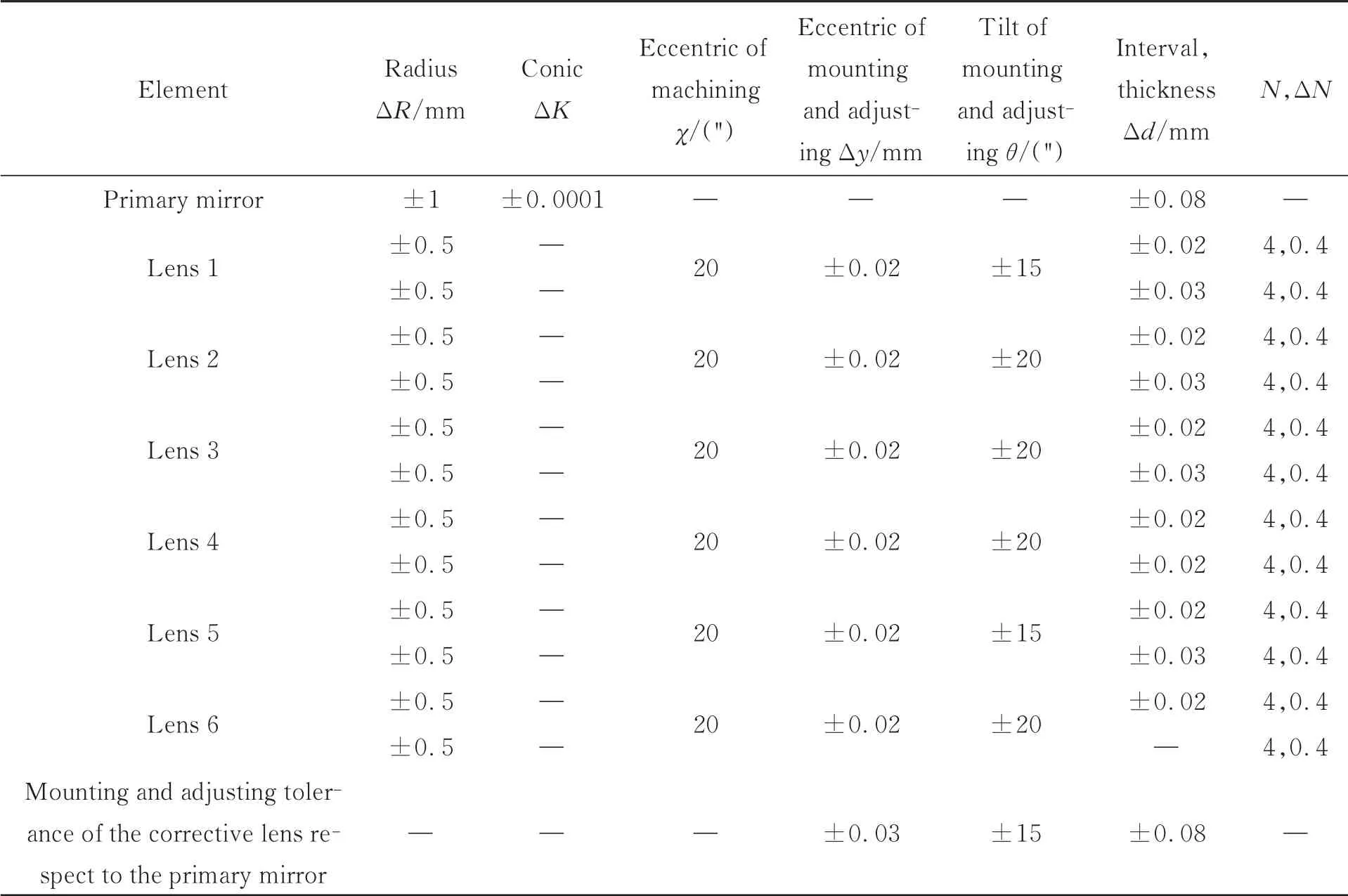
表3 光学系统公差要求Tab.3 Tolerance demands of optical system
根据表3,在设计中计算分析了100 个蒙特卡洛抽样样本,每个样本都是一个模拟加工、装调的光学系统。通过计算系统50 lp/mm 处的MTF,得到97%以上抽样的MTF>0.45,满足设计要求。
3 光学系统装调
根据主焦点系统的光学结构组成,可以将系统的装调分为主镜装调、校正镜组装调和系统装调[13-15]。3 个过程分别控制主镜的面形精度、校正镜组透镜间的相对位置精度、校正镜组相对主镜的位置精度及探测器的离焦。根据表3 中的公差要求,在软件中进行Mont-Carlo 仿真抽样分析,系统装调时的补偿环节为后截距。像面调焦范围是-3~+3 mm,精度为±0.01 mm。以系统最终的RMS 波像差为标准,随机100 次试验,其中90%以上抽样的轴上系统RMS 波像差小于0.8λ,轴外RMS 波像差小于0.1λ。由分析可知,公差要求中的主镜、校正镜为敏感光学元件,其面形误差、装调中的倾斜与偏心误差均对系统影响较大。因此,在装调条件允许的情况下,应尽量保证主镜、校正镜的面形精度,同时提高倾斜与偏心误差。
3.1 主镜装调
主镜的装调精度依靠调节主镜与镜室之间的支撑结构,该支撑结构包括轴向底支撑组件、径向侧支撑组件,如图7 所示。其中,轴向底支撑采用3 组半柔性机构Whiffletree 逐级扩展为18个等力支撑点[16]。径向侧支撑采用6 套对称排布的柔性切向杆机构,机构在主镜径向及轴向方向均采用柔性连接方式。
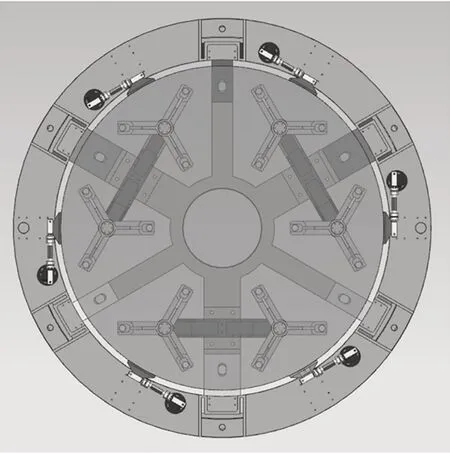
图7 主镜支撑系统Fig.7 Support system of primary mirror
装调过程中,主镜光轴竖直向上,应用激光干涉仪、补偿器和平面反射镜对主镜面形进行实时检测,激光干涉仪的检测波长为632.8 nm。通过不断调整主镜支撑结构,直至面形达到λ/30,满足精度要求,光路如图8(a)所示。考虑到望远镜系统的实际应用场景,光轴指向覆盖0°~90°(水平到天顶),因此,在光轴竖直状态下完成主镜装调后,对光轴水平状态的主镜面形进行检测,光路如图8(b)所示,检测面形同样达到λ/30的精度。两种状态下主镜的面形检测结果如图9所示,竖直检测面形为0.033 0λ,水平检测面形为0.032 3λ。
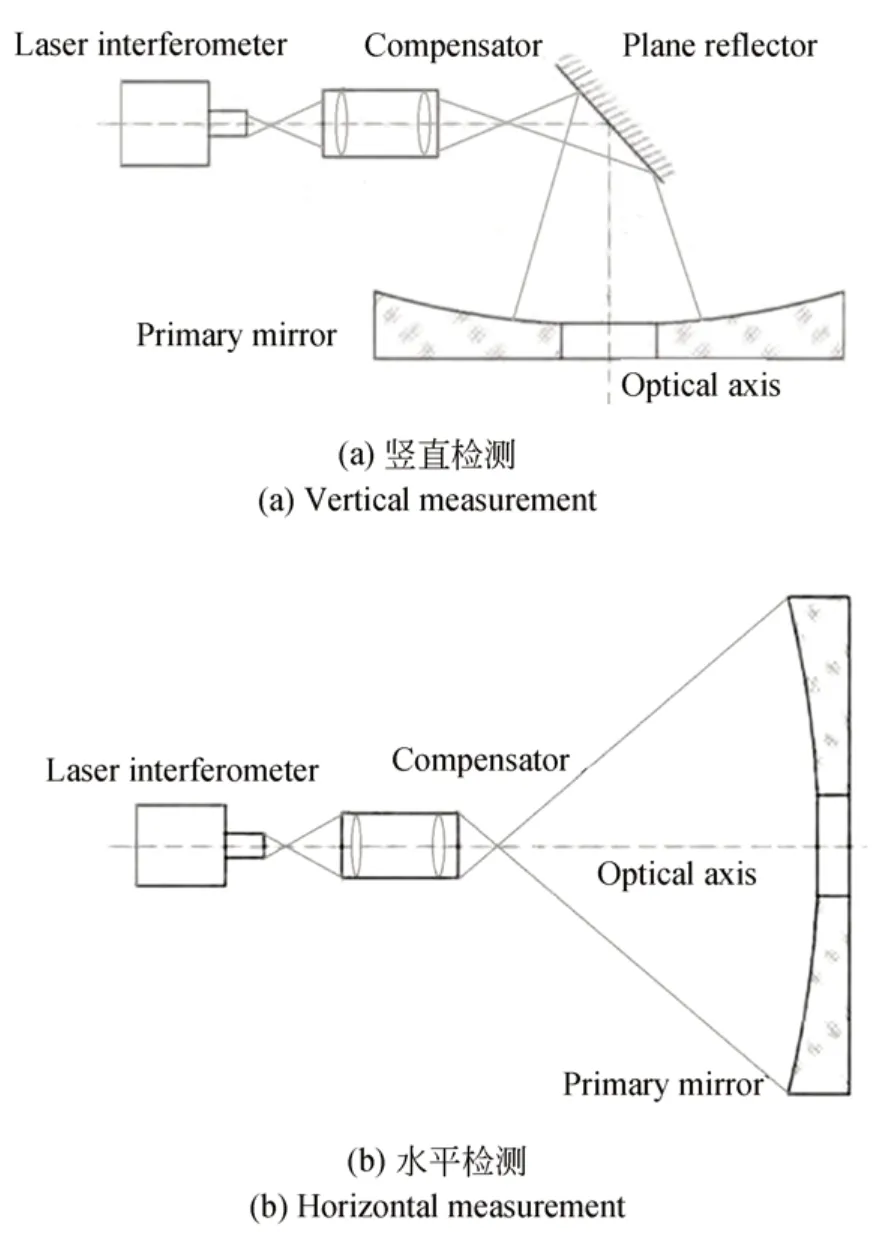
图8 不同状态下主镜面形检测示意图Fig.8 Schematic diagram of primary mirror surface measurement in different conditions
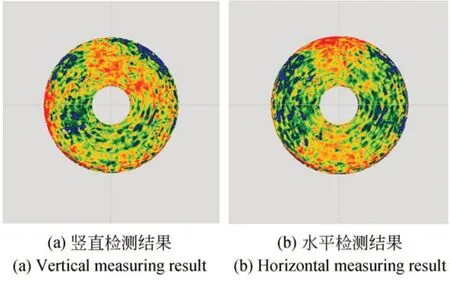
图9 主镜面形检测精度Fig.9 Measurement for RMS of primary mirror
3.2 校正镜组装调
校正镜组作为光学系统的重要组成部分,其装调质量直接决定了系统的成像质量。为提高像质,该系统采用较大口径的校正镜组,最大镜片口径可达312 mm,大幅增加了装调难度。校正镜组采用旋转定心装调的方式,严格按照公差要求进行。定心装调前,将6 片球面透镜逐一与各自的镜室安装,由于透镜口径较大、装调精度较高,安装过程中受力不均的情况会造成透镜面形变化超差,因此采用激光干涉仪实时检测单镜面形,整个安装、调整过程在干涉仪的监视下完成。
应用高精度定心间隔测量仪开展定心装调,如图10 所示。仪器发出的光线通过镜头的上下移动,能够定位到透镜单个表面的顶点像与球心像,通过转台的转动能够计算出透镜的位置偏差,从而得到精确的位置信息。首先,将最下方第一块透镜组件置于定心仪转台之上,利用仪器检测,调整该透镜与转台转轴同轴。安装第二块透镜组件,检测其光轴与透镜1 的间隔偏差,修研调整垫圈,直至满足要求。透镜的装调结果见表4,满足公差要求。
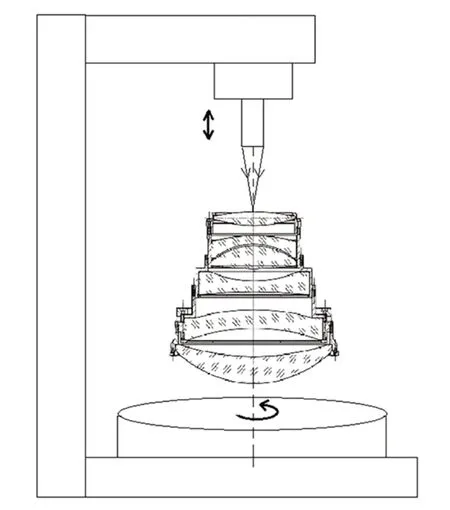
图10 校正镜组的装调检测Fig.10 Alignment and test of corrective lens assembly
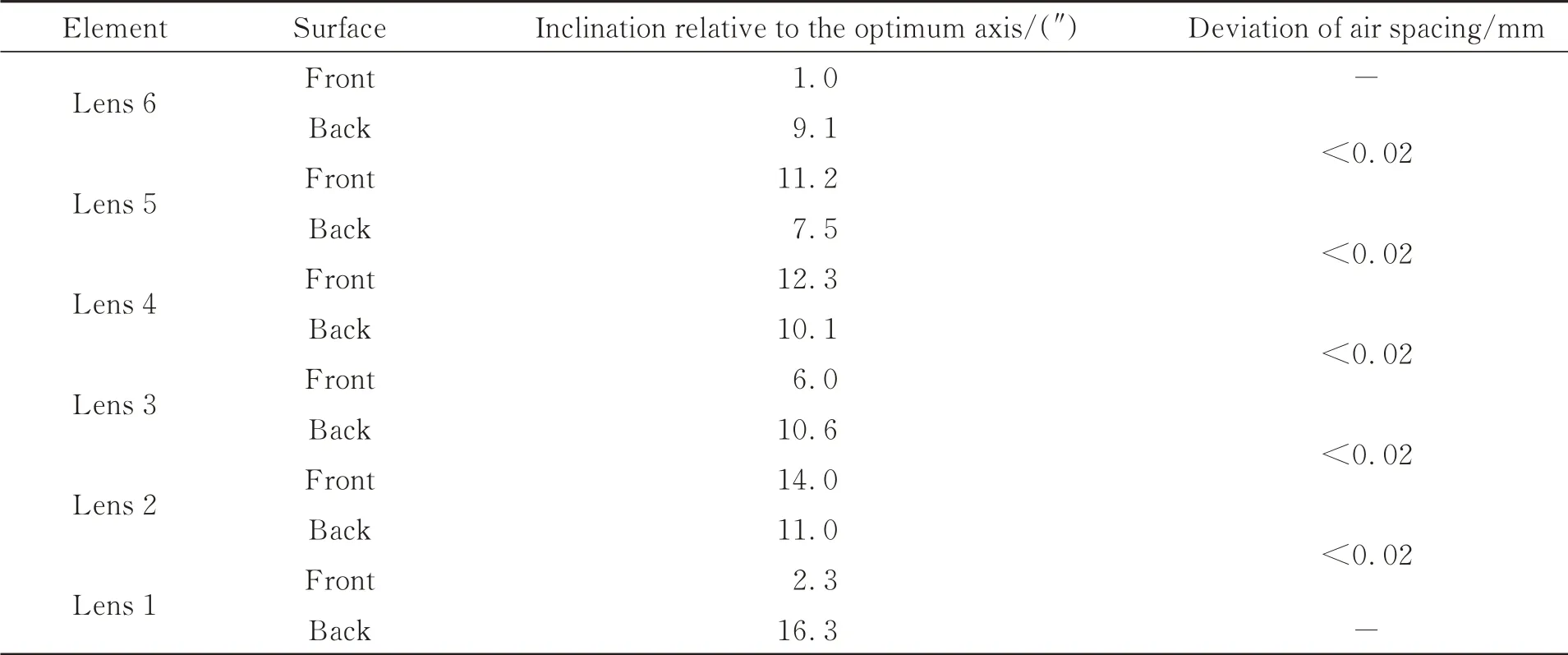
表4 校正镜组的装调结果Tab.4 Aligning and testing result of corrective lens
3.3 系统装调
系统装调本质上就是主镜与校正镜组相对位置的调整。将二者通过相关结构件连接后,以主镜为基准,调整校正镜组位置。借助平行光管、成像探测器等展开装调,原理如图11 所示。光源照亮平行光管焦平面位置的星点靶,平行光管发出的平行光被系统接收,成像于探测器上[12]。当主镜与校正镜组的相对位置存在偏差时,探测上接收到的星点像可能包含球差、彗差和像散等像差,利用计算机辅助装调,通过光学设计软件仿真分析,将包含像差的星点图像与校正镜位置偏差相对应,调整校正镜的姿态和位置(倾斜、平移、间隔)直至理想状态。通过严格调整探测器的方位角和俯仰角,控制探测器的离焦。
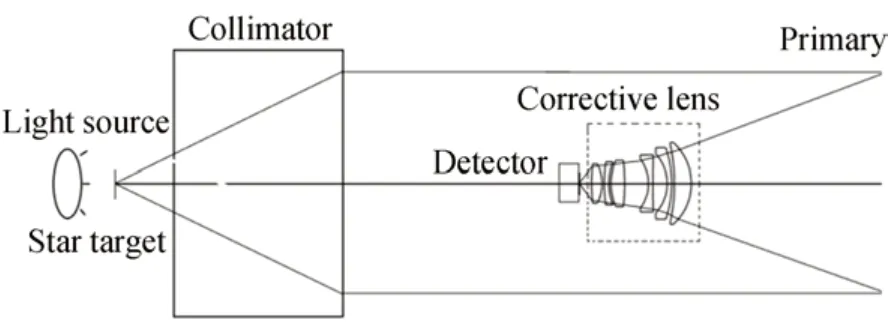
图11 光学系统装调光路Fig.11 Layout of optical system alignment
采用星点检验方法对装调好的系统进行像质评价,利用软件方法判断探测器星点像所占的像元数。系统全靶面(视场)范围内九点分布星点像如图12 所示,通过软件分析得出全视场内80%能量集中在3×3 个像元内,符合设计要求,装调方法切实可行。
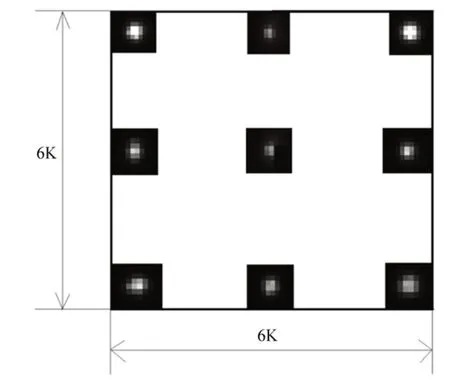
图12 全视场九点星点图Fig.12 Nine-point star point plot in full field
4 结 论
本文研究了大口径主焦点式望远镜光学系统的设计方法,利用光学设计软件,实现了对由抛物面主镜和六块球面透镜构成的1 m 口径主焦点光学系统的详细设计与像质分析。然后,研究了大口径主焦点光学系统的装调方法,包括主镜的支撑调整、校正镜组的定心装调以及系统装调的星点校验装调。最终,1 m 口径主焦点系统全视场内80% 的能量集中度在3×3 个像元以内,装调方法有效可行。本文对大口径主焦点光学系统的设计与装调具有借鉴意义。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
科学技术创新(2021年25期)2021-09-11
重型机械(2020年3期)2020-08-24
中国医疗设备(2019年1期)2019-01-15
综合智慧能源(2017年10期)2017-01-18
遵义医科大学学报(2012年2期)2012-01-23
