基于DMPC的智能网联汽车多车道协同编队控制
2023-01-13 06:59曹福贵
内蒙古公路与运输 2022年6期
曹福贵,王 新
(江苏省交通技师学院,江苏 镇江 212000)
1 引言
群集是一种普遍存在的自然现象,群集运动是模拟自然界中生物运动的分散式协同控制方法,智能网联汽车协同编队属于多智能体群集的典型问题。编队控制方法主要有跟随领航者法[1]、虚拟结构法[2]、人工势能场的方法[3]、以及基于行为的方法[4]。
智能网联汽车(ICV)多车道协同编队主要针对多ICV在复杂多变的交通环境下,通过调整自身运动参数来实现自身与邻居ICV 之间保持相对稳定的集合位姿及相同的运动参数。编队控制作为多智能体系统(MAS)分布式协同控制中的典型问题受到研究人员广泛关注[5]。清华大学李克强院士团队提出的四元素模型[6,7]是利用MAS 来研究车辆队列问题的经典框架,其中,基于MAS 的车辆编队控制问题的核心和难点是分布式控制器设计。
由于常见的分布式控制器无法显式处理队列稳定性及无法处理状态或者控制的约束,而采用分布式模型预测控制(DMPC)的控制器可预测车辆动力学变化,显式处理系统约束和性能指标,优化控制问题被引入车辆队列系统协同控制[8]。DMPC控制器在采样周期同时处理多个开环优化问题,每个子优化问题求解条件是局部目标、局部动力学、局部约束和局部状态,基于局部状态求解来保证全局目标是DMPC 控制器的难点[9]。
基于MAS的车辆编队控制目前大都是研究单车道上一维队列问题。本文ICV 编队控制采用虚拟领航者法[10,11],虚拟领航者队形为目标编队队形,设计了用于二维编队控制的DMPC控制器作用于多车道上的ICV,实现被控ICV编队行驶,并进行了DMPC控制器数值仿真。
2 群体协同编队控制
自然界中的鱼群、鸟群、细菌和昆虫等普遍存在着群集现象,智能网联汽车的编队运动属于多智能体群集范畴,因此可以采用多智能体群集运动的相关方法来研究智能网联汽车的编队控制。
2.1 多智能体的群集运动
多智能体的群集运动中,所有的智能体能够最终达到速度矢量相等,相互间的距离稳定,群体内部的总势能达到最小,群形状趋于稳定。1987 年,C W Reynolds最早提出了群集运动控制模型,探讨了如何能在计算机动画中模仿鸟类和鱼群的行为,并定义了个体在运动过程中遵循的三条基本规则[12]:①避免碰撞(Separation);②尽量靠拢(Cohesion);③速度匹配(Alignment)。这三条规则都是局部规则,智能体根据附近个体的行为调整自己的行为。这三条行为规则为群集的研究奠定了坚实基础,是研究群集行为的开创性成果。群体运动当前的研究热点是多机器人群体系统应用,编队控制问题是多机器人协调控制中的一个典型问题,是在群集运动的基础上加入了“队形要求”。早在20 世纪80 年代,就有学者提出编队系统控制的概念,进入90年代以后,多机器人的编队问题也逐渐开始受到越来越多研究者的关注与研究。
2.2 协同编队控制的方法
关于编队控制方法的优缺点对比见表1。随着ICV研究开展与深入,编队控制越来越趋向于多种方法的融合。通常情况下,一字形、菱形和正六边形等是常见的车辆编队基础队形。

表1 编队控制方法优缺点对比
2.3 虚拟领航者法
传统的虚拟领航者法采用虚拟结构法形成的虚拟刚体作为跟随者的虚拟领航者,虚拟刚体结构可变,采用基于行为法动态调整其状态参数,但是刚体结构不能体现出外界环境对其影响,无环境适应性,因此引入环境势场对传统的虚拟领航者法进行改进。
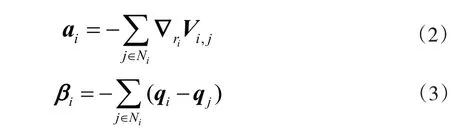
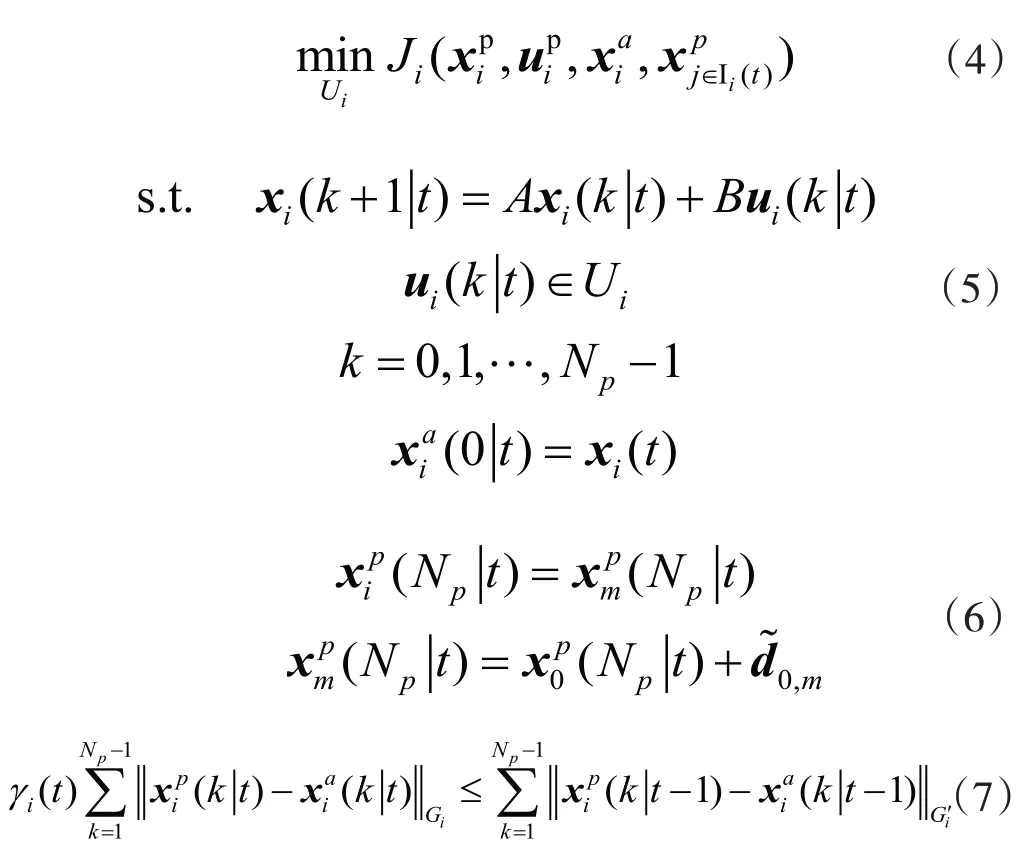
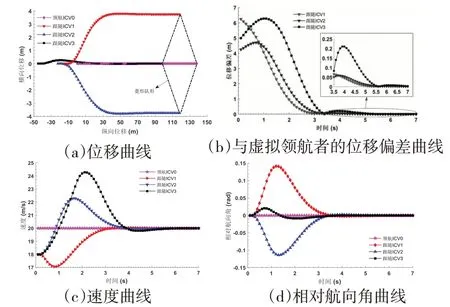
数量为M个ICV个体组成的群体,其对应的虚拟领航者数量为N(M 式中,pi=(xi,yi)T表示虚拟领航者VLi的坐标;表示速度向量;ui=(uxi,uyi)表示控制输入,ui由两部分组成由环境势场来确定,用于控制虚拟领航者个体间距离,保证在不发生个体间碰撞的情况下整体势能最小;βi用于调整个体的速度,保证速度最终收敛到同一矢量。 在固定或切换的通信拓扑结构下,虚拟领航者的控制率均为ui=αi+βi(i=1,2,…,N)。具体形式为: 式中,∇为哈密顿算子,Vi,j是驱动个体运动的人工势场函数。 DMPC是在MPC的基础上发展而来的,通过求解有限时域下的最优控制问题,并以最优控制序列的第一个值作为实际输入,驱动系统向前运行,一定程度上近似无穷时域下的最优控制效果[13]。 在DMPC中,每个ICV需要实时根据当前自身状态和邻居状态求解一个预测时域内的优化问题,获取自身控制输入。预测步长为Np,每个预测时域[t,t+Np]内,记假设控制序列为uia(k|t),预测控制序列为uip(k|t)、最优控制序列为ui*(k|t),其中k∈{0,1,…,Np-1},假设状态序列为xia(k|t),预测状态序列为xip(k|t),最优状态序列为xi*(k|t),其中k∈{0,1,…,Np},ICVi根据其在t-1 时刻存储的自身uia(k|t)和xia(k|t)与t时刻接收相邻ICV的uja(k|t)和xja(k|t),在预测时域内求解其分布式优化问题,得到ui*(k|t)和xi*(k|t)变量序列值,并将该序列中的第一个输入ui*(0|t)用于t 时刻的实际系统输入,其它序列进行平移构造,并将这些序列存储,作为t+1 时刻的假设控制/状态序列。 t时刻,ICVi的优化问题设计为: 代价函数Ji的具体形式为: 假设上述优化问题在一个采样周期内求解完成。DMPC控制器的算法流程设计为: 第一步:t=0时刻初始化。假设所有的ICV都处于匀速运动状态,求解节点i上的假设输入和输出序列。 ①假定领航ICV 的轨迹为预设轨迹,头车及其确定的虚拟领航者满足: 第二步:t≥1 时刻,迭代。在t 时刻,对于节点ICVi,i∈[1,N],个体ICV执行过程如下: ①所有ICV 广播自身的假设控制/状态序列uia(k|t)和xia(k|t),并接收邻居的假设控制/状态轨迹序列uja(k|t)和xja(k|t)。 ②优化求解问题式(1),跟随ICV间施加非线性距离约束,得到最优控制/状态轨迹序列ui*(k|t)和xi*(k|t)。 ③将ui*(0|t)用于ICVi控制,其它序列进行平移构造,并将这些序列存储,作为t+1时刻的假设状态参数序列。 DMPC控制器的预测终端约束收敛于其锚定的虚拟领航者,并在算法流程中加入由虚拟领航者状态参数确定的二维期望距离,以此实现多车道协同编队控制。 采用MATLAB 搭建四车仿真平台,以1个领航ICV(ICV0)和3个跟随ICV(ICV1~ICV3)组成的编队为研究对象,领航者为直线轨迹,验证DMPC 算法的有效性及系统稳定性。初状态根据需验证的目标待定,目标队形为菱形编队,如图1 所示。仿真过程中,采样周期为0.1s,预测时域步长为Np=20,ICV 轴距L=2.7m。领航ICV为匀速直线运动,速度为20m/s,所有跟随ICV的初速度都设为18m/s,ICV0~ICV3的初始位置分别为(0,0),(-15m,0),(-22m,0),(-45m,0),菱形编队的期望车距(dX,dY)=(20m,3.75m)。 图1 DMPC控制器作用下的多车道编队场景图 图2 是在DMPC 控制器作用下的编队形成过程中跟随ICV各变量演化曲线。在DMPC控制器作用下,初状态为无序队列的四车编队实现有序编队行驶,如图2(a)所示。位移偏差快速收敛,5s以后,各跟随ICV与其虚拟领航者误差都在0.05 m以内,如图2(b)所示。ICV根据其初始位置及编队期望车距实施“加速-减速”策略或“减速-加速”策略,最终收敛到其虚拟领航者速度,如图2(c)所示,编队过程中各跟随ICV转向系统实现多车道编队的变道,各跟随ICV与领航者的航向角之差θp逐渐收敛到0,如图2(d)所示。仿真结果表明,在领航ICV为匀速直线运动工况中,DMPC控制器作用下的编队系统能够完成跟随ICV收敛到期望状态,实现编队行驶,且编队能够达到稳定。 图2 跟随车的参数变量仿真曲线 自然界中的鱼群、鸟群等普遍存在着群集现象,智能网联汽车的编队运动同样属于多智能体群集范畴,对编队控制的方法进行对比分析,提出了改进的虚拟领航者法进行编队控制;采用四元素模型来研究多智能体系统,针对智能网联汽车多车道协同编队进行分布式控制器设计,设计了分布式模型预测控制器,并介绍了控制器设计原理和算法流程,实现二维编队控制,并通过数值仿真验证分布式模型预测控制器的有效性。得出如下结论: ①分析智能网联汽车的编队运动也属于多智能体群集范畴,在对编队控制方法进行对比分析的基础上,提出了采用改进的虚拟领航者法进行编队控制。 ②相较于单车道一维队列控制,本文ICV 编队控制采用虚拟领航者法,DMPC控制器的预测终端约束收敛于其锚定的虚拟领航者,并在算法流程中加入由虚拟领航者状态参数确定的二维期望距离,以此实现二维多车道协同编队控制。 ③将设计的DMPC 控制器用于ICV 多车道协同编队控制,并进行仿真验证,仿真结果表明,DMPC控制器作用下的编队系统能够完成跟随ICV收敛到期望状态,实现编队行驶,且编队能够达到稳定,从而验证了DMPC控制器的有效性。
3 DMPC控制器设计原理

4 DMPC控制器算法流程

5 DMPC控制器性能仿真

6 结语
猜你喜欢
中国交通信息化(2022年9期)2022-11-19
今日农业(2021年5期)2021-05-22
疯狂英语·读写版(2021年2期)2021-03-01
疯狂英语·新读写(2021年2期)2021-02-25
网络与信息安全学报(2020年5期)2020-10-21
网络安全和信息化(2019年1期)2019-12-22
电子制作(2019年11期)2019-07-04
舰船电子工程(2018年12期)2019-01-03
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06