基于磁补偿实验的微重力下毛细管内动态流动特性研究1)
2023-01-15 12:32金宇鹏肖明堃邱一男王天祥杨光黄永华吴静怡
力学学报 2022年12期
金宇鹏 肖明堃 邱一男 王天祥 杨光, 黄永华 吴静怡
*(上海交通大学制冷与低温工程研究所,上海 200240)
†(航天低温推进剂技术国家重点实验室,北京 100028)
引言
随着航天技术不断发展,微重力下的流体贮存和管理问题变得至关重要[1-3],如维持生命所需的液体获取、废水的回收处理、推进剂的存储与输运、冷却剂的管理等.在这些问题中,由于重力作用的减弱,表面张力在流动控制方面发挥着主导作用.提高微重力条件下的液体管理能力有赖于对表面张力主导下的毛细流动机理的深入探究[4-9].
毛细管内的液体流动作为基本流体输运模型之一,从上世纪便受到了人们的广泛研究[10-13].如Levine等[14]提出了描述圆管内毛细爬升运动的方程,并考虑了入口流的效应.之后,Stange等[15]提出了被人们广泛接受的微重力环境下圆管内毛细爬升理论模型,该理论模型反映的毛细爬升规律在许多微重力实验中得到了验证.徐升华等[16]探究了管截面对微重力环境下毛细爬升的影响.李永强等[17]基于Stange等[15]的理论模型,利用同伦法研究了微重力环境下圆管毛细流动的近似解析解.之后,Wang等[18]研究了接触角与管径对微重力环境下圆管内毛细爬升的影响,并与Stange等[15]提出的理论模型进行对比验证.周宏伟等[19]还在Stange等[15]的理论模型上进行修正,提出了微重力条件下与容器相连的毛细管中液面爬升理论模型.Wang等[20]探究了动态接触角对管内液体爬升的影响,并针对振荡行为建立了理论模型.Chen等[21]推导了椭圆截面管内毛细管驱动流动方程.目前微重力环境下管内液体流动行为的理论研究已经较为成熟,然而各因素对爬升动态规律影响的实验验证研究仍有欠缺.并且由于实验手段的限制,在不同重力水平下的管内毛细爬升行为仍有待探索.
在实验研究方面,传统用于微重力流动特性研究的实验方法还有探空火箭、载人飞船、空间站和落塔等[22-24].其中探空火箭、载人飞船、空间站等方式成本高且任务排队周期长,不利于进行长期的微重力研究.落塔作为一个相对容易获得的微重力实现方式,是目前人们研究微重力环境下液体流动特性的主要手段[25-27].然而由于落塔无法实现重力水平的调节,等效重力水平对管内毛细流动的影响规律仍然缺少实验验证,并且落塔由于其实验过程短暂,也难以实现微重力下流体热物理规律的研究.基于磁补偿原理可在地面上实现微重力模拟环境,利用梯度磁场产生的磁场力对含有磁性纳米颗粒的磁流体进行等效重力补偿.该方法具有重力水平可调节、微重力时间长、可视化成本低以及允许介入操作等优点.张泽宇等[28-29]探究了磁补偿系统非均匀度对液体流动的影响.肖明堃等[30]模拟了非均匀磁场作用下微重力环境中液氧气液相界面分布规律.沈逸等[31]利用磁补偿系统进行了微重力下内角流动研究.
本文以水基磁流体为实验工质,基于磁补偿方法开展微重力模拟实验.通过将实验数据与理论模型对比,验证了利用磁补偿方法进行微重力下流体流动研究的可行性.探究微重力环境下毛细管内的动态毛细爬升规律,并明确毛细管结构参数、等效微重力水平以及接触角对毛细管内毛细流动行为的影响规律,相关结果对下一步开展低温推进剂在空间微重力环境下表面张力管理研究有重要指导意义.
1 基于磁补偿原理的微重力模拟实验
本文研究所利用的常温磁补偿实验系统如图1所示[31].主要由亥姆霍兹-麦克斯韦双对超导线圈、水冷系统、精准定位装置、实验腔体等组成.亥姆霍兹-麦克斯韦双对超导线圈同轴装配,使得产生的均匀磁场与均匀梯度磁场在双对超导线圈中间.其中均匀磁场对磁流体起到磁化作用,磁场强度大小沿高度方向线性变化的均匀梯度磁场使磁流体受到与重力方向相反的力.实验腔体采用内径为30mm,高度为70mm 的圆柱亚克力玻璃容器.通过实验系统内的精准定位装置(定位精度1 μm),调整实验腔体在双对超导线圈内部的物理空间位置,使得实验腔体可放置于磁场的中轴线上.使用高速相机对毛细管内的动态毛细爬升过程进行拍摄.为了更清晰地捕捉液面运动,使用LED 光源对实验腔体进行辅助照明.
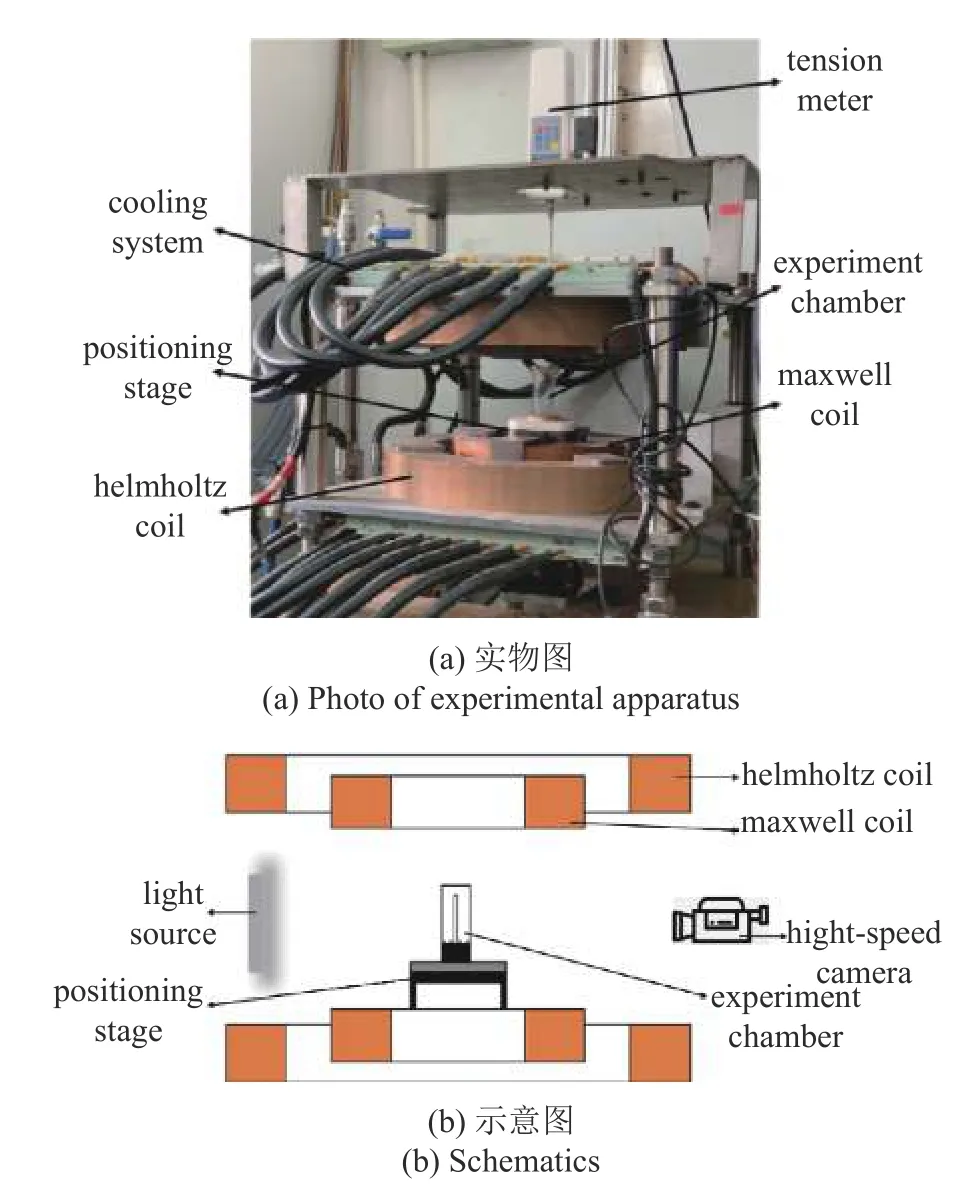
图1 磁补偿实验装置图片Fig.1 The magnetic compensation experimental device
磁补偿实验系统中,磁体最大磁场为1000Gs.有效实验区域为Φ40mm×80mm,该区域内对实验工质达到完全磁补偿时,梯度磁场的纵向非均匀度为 ±2.5%[31-35].利用装载有步进电机的测磁装置对加入磁流体前后实验系统内的磁场强度大小进行测量对比,结果显示加入磁流体造成的实验系统内磁场强度变化可以忽略.实验前利用装有实验工质的玻璃容器和拉力计对实验区域内磁场力补偿重力的效果进行校准.将玻璃容器悬挂在拉力计上,拉力计示数随着补偿磁场的增大而减小,示数减少的数值即为容器内实验工质的等效重力补偿值.使用的拉力计精度为1 mN,玻璃容器内的实验工质的重力为2 N,因此可以认为本实验系统对于微重力环境的分辨率为5.0×10-4g.该实验系统的重力补偿水平与麦克斯韦线圈电流之间近似呈线性关系[31],实验区域内等效重力水平为0g,g/6,g/2 时,麦克斯韦线圈中的电流分别为76 A,63 A,38 A.
实验腔体内部构造示意图如图2 所示,在实验腔体内装有中间打孔的亚克力玻璃挡板,既能够使毛细管竖直插入在实验腔体中间,也能够抑制实验过程中水基磁流体沿着实验腔体内壁爬升.实验所使用的毛细管通过亚克力挡板中间的小孔插入水基磁流体中,每次实验的初始插入深度h0均为10mm.
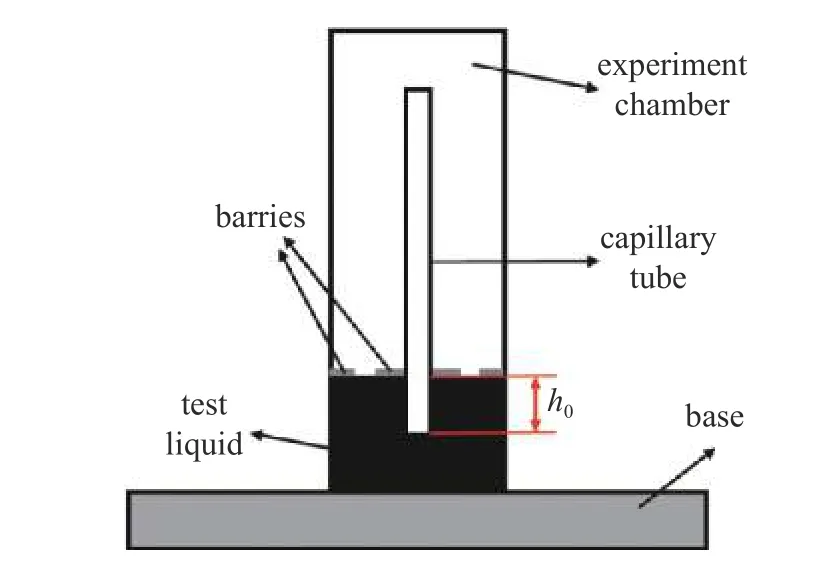
图2 实验腔体内部示意图Fig.2 Schematic diagram of the inside of the experimental chamber
磁补偿微重力实验的工质为在外加磁场下具有超顺磁性的水基磁流体.采用的磁流体在被磁化后仍具有良好的流动性能和稳定性,且其均匀性和主要物性不发生明显变化[36-41].将水基磁流体与去离子水进行配比,水基磁流体/去离子水的体积比为40/60.配比得到的水基磁流体溶液的相关物性参数经过多次测量取平均值,列于表1.其中ρ为液体密度,σ为液体表面张力,ν为运动黏度.σ与ν分别采用悬滴法、旋转法测量.αa1和αa2分别为水基磁流体溶液在石英玻璃和亚克力玻璃上的前进接触角,采用液滴体积增加法测量(图3).文献[38]表明,对于本实验系统中的磁场强度范围,磁场对流体表面张力和固体表面特性的影响可忽略,因此在本实验研究中忽略磁场对接触角的影响.为了避免表面污染对于测量与实验结果的影响,实验所使用的石英玻璃平板与石英毛细管都经过两次无水乙醇的冲洗,并在无水乙醇溶液中进行300s 的超声清洗,然后用去离子水进行3 次冲洗,最后使其自然风干.由于无水乙醇对亚克力玻璃有腐蚀作用,亚克力玻璃平板与毛细管的清洗过程均采用去离子水,其清洗步骤与石英玻璃相同.
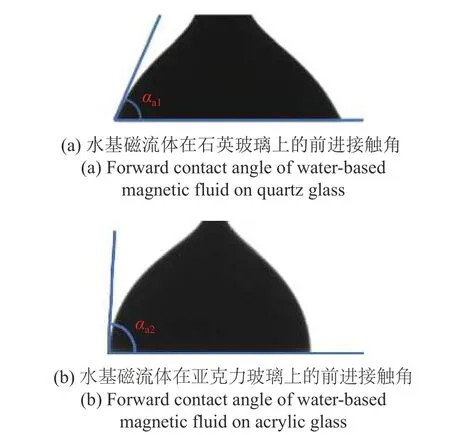
图3 磁流体在不同表面上的前进接触角测量Fig.3 Forward contact angle measurement of magnetic fluid on different surfaces

表1 体积比为40/60的水基磁流体/去离子水溶液的物性参数Table 1 Physical properties of water-based magnetic fluid/deionized water solution with a volume ratio of 40/60
实验过程中通过高速相机进行液面形态的记录与存储.最后通过基于Matlab 的图像识别程序对实验视频进行处理,记录水基磁流体溶液在毛细管中的动态爬升特性.图4为0(±5.0×10-4)g环境下2 mm 管径石英玻璃管内磁性流体动态爬升示意图.
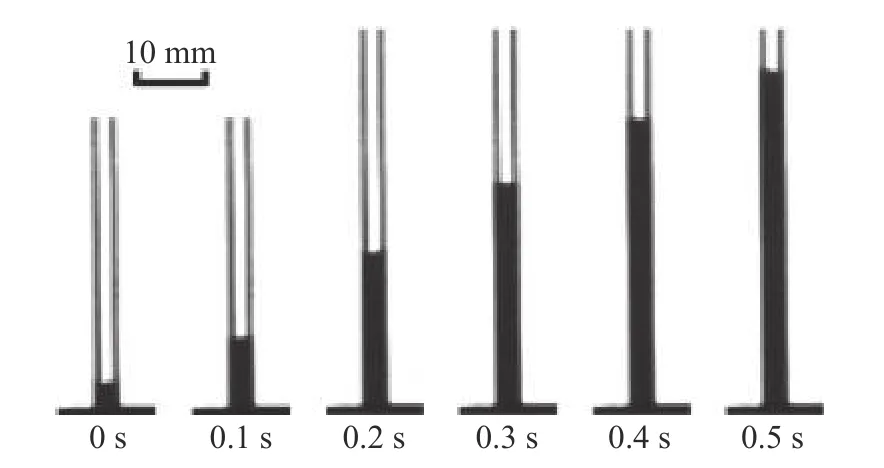
图4 管径2 mm 石英玻璃管内水基磁流体爬升示意图Fig.4 Schematic diagram of water-based magnetic fluid climbing in a quartz glass tube with a diameter of 2 mm
2 实验结果与讨论
2.1 毛细管流动实验结果与理论模型的对比分析
由于实验目标区域内梯度磁场的纵向非均匀度为 ±2.5%,为定量研究该因素对实验结果的影响并进一步验证基于磁补偿原理开展微重力环境下流体流动实验的可行性,将近似零重力条件下的流体爬升特性与理论模型进行对比.
式(1)是由Stange等[15]基于数值解和实验相结合的方法提出的微重力下圆管内毛细爬升高度随时间变化的理论模型,该模型已通过落塔实验验证并被用于更深入的研究[16-19]
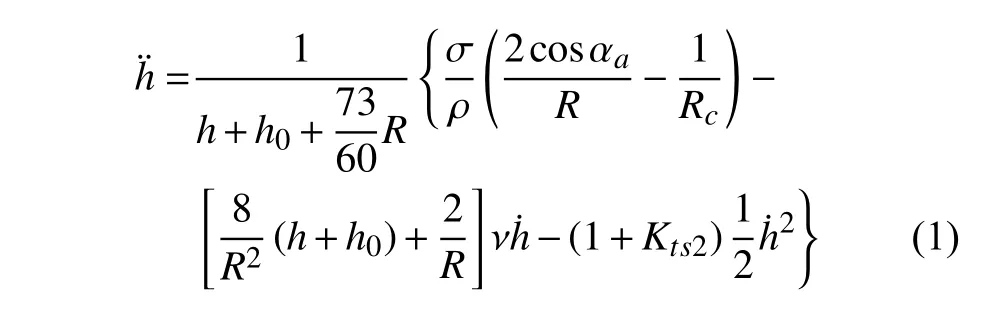
其中,h为毛细管内弯月面高度,h0为毛细管的初始插入深度,R为毛细管内径,σ为液体表面张力,ρ为液体密度,s反映了微重力环境下初始爬升阶段毛细管内弯月面重新定向的过程,αa为前进接触角,Rc为实验腔体液面的曲率半径,ν为液体黏度,Kts2为对流损失的修正系数.等式右边大括号内从左到右依次为表面张力驱动项、黏滞力项和对流损失项.该理论模型考虑了弯月面的重新定向、前进接触角、惯性力以及流动损失等因素的影响.式(1)描述的微重力下圆管内毛细流动分为三个连续的阶段.第一阶段为纯惯性阶段,由惯性力对抗毛细驱动力,毛细管内弯月面高度h与t2成线性关系;第二阶段为对流损失主导,弯月面高度h与时间t成线性关系;第三阶段主要考虑到黏滞力的影响,毛细管内爬升规律遵循Lucas-Washburn 行为,弯月面高度h与成线性关系[15].
本文采用0(±5.0×10-4)g环境下内径为1,2,4 mm 石英玻璃毛细管中的毛细爬升与理论模型进行对比,对磁补偿实验台的实验偏差进行验证.值得注意的是,由于目前没有绝对完善的动态接触角理论模型,本文在式(1)中分别使用由液滴体积增加法测得的前进接触角(图3) 以及由Jiang 模型[20,42]所表示的动态接触角,获得解析解.
理论模型与实验的对比结果如图5 所示,图中的误差线为四次独立重复实验结果的标准差.实验与采用两种不同接触角模型的理论解析解的平均相对偏差分别为7.1%(液滴体积增加法)和13.7%(Jiang 动态接触角模型).综合考虑对比结果和实验误差,可以认为本文使用的磁补偿实验台能够用于对微重力下毛细管内动态流动特性的实验分析.
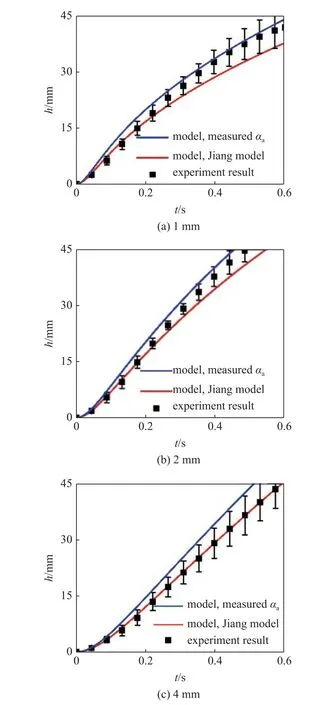
图5 0(±5.0×10-4)g 环境下1,2,4 mm 管径石英玻璃管实验结果与理论模型的对比Fig.5 Comparison of experimental results and theoretical models in quartz glass tubes for diameters of 1,2,4 mm in0(±5.0×10-4)g environment
2.2 管径对毛细爬升的影响
图6为0(±5.0×10-4)g下不同管径的石英玻璃毛细管内流体动态运动的h-t图.从图中可以看出,1 mm 毛细管中的液面高度随时间变化与理论模型一致,其爬升先后经历了三个阶段,三个阶段之间的时间分界点分别约为0.1 s和0.3 s;2 mm 毛细管的爬升曲线虽然没有出现明显的第三阶段,但已经呈现向下弯折的趋势;由于实验区域大小的限制,在实验结束时,4 mm 毛细管内毛细爬升仍处于第二阶段.文献[15,18]中的落塔实验也有类似的现象,即当高度或流动时间有限时,大管径的毛细管内只能观察到前两个爬升阶段.
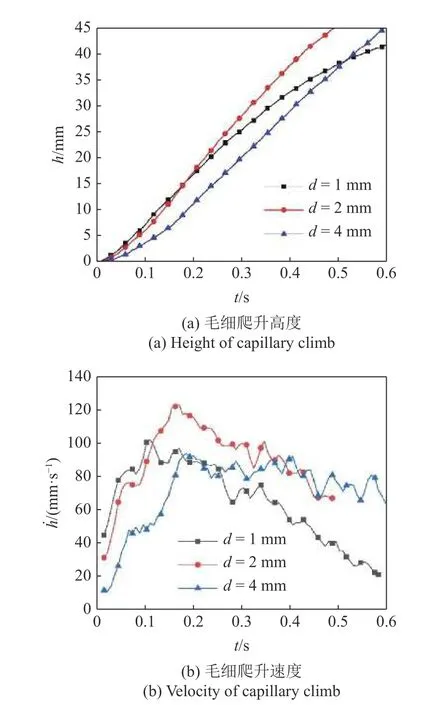
图6 不同管径石英玻璃管内的毛细爬升过程Fig.6 Capillary climbing process in quartz glass tubes with different diameters
在0.15 s 之前,同一时刻内毛细管弯月面的高度随着管径的变小而变大.当磁补偿环境开启,毛细爬升开始时,管内液体的高度与速度较小,对应的黏滞力与对流损失可忽略不计,管内液体的爬升主要由毛细压强驱动.由于毛细压强随着管径的增大而减小,因此在初始爬升阶段,同一时刻内小的毛细管对应高的弯月面高度与速度.例如在t=0.08 s 时,1,2,4 mm 毛细管内弯月面的爬升速率分别约为86 mm/s,79 mm/s,56 mm/s.
随着时间t的增长,管径1 mm 的毛细管液面爬升率先经历第二阶段,并转向第三阶段,最终趋于平缓.在0.17 s 左右,其弯月面高度被2 mm 毛细管超过,并在0.5 s 左右被4 mm 毛细管超过.由式(1)可得,导致毛细爬升过程由第一阶段向第二阶段转换的关键因素是随着流动的发展,液面上升速率的增大使得与成正比关系的对流损失项变得不可忽略.小管径毛细管内虽然有大的驱动力,但是在爬升初期其对应的对流损失阻力较大.因此,导致了2 mm 管内弯月面高度在0.17 s 超过1 mm 管.1 mm 管在0.1 s 附近就开始受到对流损失项的主导作用,弯月面上升速率在0.1 s 左右达到峰值并开始下降.而此时2 mm 管内弯月面上升仍受毛细驱动力的主导作用,处于速度上升阶段,并且在0.15 s 左右其速度增大趋势才开始变得缓慢.
在实验区域内,4 mm 毛细管内弯月面的高度总是低于2 m m 毛细管.但是在实验区域末段,2 mm 管内毛细爬升已经有了向第三阶段转换的趋势,4 mm 管内则仍处于第二阶段并且管内弯月面高度已经有了赶超2 mm 毛细管的趋势.促使近似0g环境下毛细流动由第二阶段进入第三阶段的主要因素是黏滞力作用的变大.由式(1)可得,黏滞力项的影响因素有管径大小R、弯月面高度h与弯月面爬升速率.其中对毛细爬升过程进入第三阶段起关键作用的是速率.速率的下降同时对黏滞力项与对流损失项起削弱作用.然而黏滞力项与成线性关系,对流损失项则与成线性关系.进入第二阶段后,毛细爬升速率的波动下降加强了黏滞力项的作用.随着速率的减小,黏滞力占主导地位,流动也因此进入第三阶段.在观察范围内,4 mm 毛细管内爬升速率并未出现持续的急剧下降,而是一直在83 mm/s 附近波动,这也是导致4 mm 管内观察不到明显的第三阶段规律的原因.由此推测,若是能够将磁补偿实验区域增大,4 mm 毛细管内弯月面爬升会经历第三阶段,并且其高度h将会超越2 mm 毛细管.
如图6,不同管径的毛细管内弯月面爬升速率变化趋势显示出良好的一致性.初始阶段,管内的弯月面爬升速率迅速变大,速率达到峰值以后,会经历波动下降的过程,其中1,2,4 mm 管内爬升速率达到峰值的时间分别约为0.11 s,0.17 s,0.18 s.在爬升速率达到峰值之前,同一时刻内小管径毛细管中的弯月面爬升速率大于大管径毛细管.值得注意的是,由于加速阶段的时长不同,最大速度并不与管径大小的变化一致.其中2 mm 毛细管内速率峰值最大,1 mm 毛细管次之,4 mm 毛细管最小.实际上,由式(1)可得,相同材质毛细管内弯月面上升加速度的大小不仅受到上升速率的影响,还与管内弯月面高度与管径等有关,因此管内弯月面上升速率达到峰值的时刻以及峰值大小并不与管径成线性关系.同样地,管内流动状态由前一阶段转向后一阶段的时刻也不与管径成线性关系.
从图6(a)中可以发现,1,2,4 mm 管内爬升曲线在初始阶段都是下凹趋势,经历短暂的h与t2成线性关系趋势后,会马上进入近似h与t成线性关系阶段.对比图6(b),均稍早于其各自速率达到峰值的对应时刻.这说明,在毛细爬升速率达到峰值之前,毛细管内的爬升过程就已处于第二阶段.1 mm 毛细管内流动进入第三阶段的时刻约为0.3 s;2 mm 毛细管内在0.4 s 附近呈现进入第三阶段的趋势;经历0.58 s 后4 mm 毛细管内流动并未进入第三阶段.
如图7 所示,为了更准确地反映管径对管内液体爬升规律的影响和管内动态流动特性,参照文献[15]对h˙与t进行无量纲化:其中,为管内爬升的理论最大速度,表征流动进入第二阶段;tc=ρd2/(32υ),为理论上黏滞力主导时刻,表征流动进入第三阶段.观察图7 得,管径越小,其流动过程越趋向于第三阶段,反之,管径越大,其流动过程越趋向于第一阶段.在各组实验结束时:4 mm 管内t*约等于tc,且h˙*仍在高位,表明其流动仍处于第二阶段;2 mm 管内t*超出tc不远,且无量纲速度开始呈现下降的趋势,说明其流动正从第二阶段向第三阶段转换;1 mm 管内t*远大于tc,且无量纲速度已经呈明显下降,这说明其流动已经进入第三阶段.这与前文分析相符合.

图7 不同管径石英玻璃管内的毛细爬升速度-时间的无量纲化Fig.7 Dimensionless representation of velocity-time for quartz glass tubes with different diameters
2.3 等效重力水平对毛细爬升的影响
为了研究等效重力水平对管内毛细爬升特性的影响,采用管径1 mm 石英玻璃毛细管在g/6,g/2,1g下进行毛细爬升实验,并与近似0g实验结果进行对比,结果如图8.随着环境重力水平的提高,弯月面上升的速率与高度都有明显的下降.在环境重力存在的三种情况下,都可以观察到弯月面高度趋于稳定.根据其爬升曲线的趋势推断,g/6,g/2 与常重力环境下管内弯月面高度将分别稳定在30mm,20mm,10mm 附近.在三种微重力环境下,管内毛细爬升速度都可以观察到明显的先急剧增大后波动下降的规律.常重力环境下则观察不到明显的速度上升阶段.

图8 等效重力水平对管内毛细爬升的影响(重力水平不确定度±5.0×10-4g)Fig.8 Influence of equivalent environmental gravity level on capillary climb in tubes(the gravity uncertainty is ±5.0×10-4g)
观察图8 可知,环境重力存在的情况下,管内弯月面上升都存在明显的第二、第三阶段.为了探究不同等效环境重力的情况下管内弯月面上升是否会经历第一阶段,如图9,将观察的时间和高度范围分别缩小到0.15 s和6 mm.可以看到,在6 mm 的观察范围内,0g环境下弯月面高度h与t2成线性关系,这与前文的分析所符合;g/6 环境下也是如此.g/2 环境下毛细管内弯月面的高度h仅仅在初始的约0.05 s 内与t2成线性关系,而后转换为与时间t成弱线性关系.1g环境下管内毛细爬升过程中,基本观察不到第一阶段的存在,其弯月面高度从初始时刻便呈现与时间t的弱线性关系.在约0.12 s 以后,其爬升趋势开始逐渐变缓.在重力存在的环境下,弯月面爬升速率较小且上升较慢,对应的对流损失项较小,这有利于毛细流动第一阶段的存在.但是环境重力不仅会直接影响毛细爬升中惯性力的大小,还会在毛细管内液柱体积增大时使弯月面上升速率减小.因此等效环境重力越大,对应的管内毛细流动过程中越难以观察到第一阶段规律的出现.

图9 0.15 s 内不同等效环境重力下的石英玻璃管内毛细爬升过程(重力水平不确定度 ±5.0×10-4g)Fig.9 Capillary climbing process in quartz glass tubes under different equivalent environmental gravity within0.15 s(the gravity uncertainty is±5.0×10-4g)
2.4 接触角对毛细爬升的影响
接触角也是影响管内毛细爬升的关键因素.图10为0(±5.0×10-4)g环境下水基磁流体在管径1 mm 的石英玻璃和亚克力玻璃管内毛细爬升过程.大的前进接触角会降低管内毛细爬升的高度与速度,并且当前进接触角较大时,很难在毛细爬升初期观察到明显的第一阶段.在观察范围内,亚克力管内的爬升高度h整体与时间t成弱线性关系.大的接触角对应小的毛细驱动力.亚克力管内较大的前进接触角使得其内毛细爬升在纯惯性阶段的加速度较小,其初始阶段的加速时间也较小,因而对流损失项与黏滞力项变得不可忽略,故亚克力管内的爬升过程无法观察到明显的第一阶段.

图10 不同材质的管内毛细爬升Fig.10 Capillary climb in tubes with different materials
3 结论
本文利用常温磁补偿实验系统进行微重力环境下毛细管内动态流动特性研究.依托于该常温磁补偿实验系统,对微重力环境下不同管径的毛细管内动态流动规律进行研究,并探究了等效环境重力水平、接触角对管内流动规律的影响.
(1)在近似零重力环境下不同管径的毛细管内弯月面爬升高度、爬升速率与Stange等[15]提出的理论模型具有良好的一致性,模型结果在实验误差之内.实验结果与利用两种不同动态接触角模型获得的理论模型解的平均偏差分别为7.1%和13.7%,因此进一步验证了利用磁补偿方法进行微重力下液体流动研究的可行性.
(2)微重力环境下液体爬升高度会经历三个不同的阶段,先后与t2,t与成线性关系.弯月面上升速率会先迅速增大,而后波动下降,是影响管内毛细流动过程在三个阶段之间转换的重要因素.
(3)管径对毛细爬升规律的影响较为复杂.初始阶段,管径越小弯月面上升高度越大;随着毛细爬升过程的发展,大管径毛细管内弯月面高度可能会超过小管径.管内弯月面上升速率都会经历迅速上升后波动下降的过程,然而上升速率的峰值与速率峰值对应的时刻大小不与管径成线性关系.
(4)环境重力的存在会影响管内弯月面上升的规律.重力存在的情况下,管内弯月面上升高度最终会趋于稳定.等效环境重力水平越大,对应的速率与高度越小.等效环境重力水平越高,越难以观察到管内毛细爬升过程中第一阶段的规律.
(5)前进接触角的增大会减缓管内毛细爬升速度,且随着前进接触角的变大,越难以观察到第一阶段的存在.
猜你喜欢
化工进展(2022年4期)2022-04-26
可再生能源(2021年12期)2021-12-28
航天返回与遥感(2021年1期)2021-03-16
陶瓷学报(2019年6期)2019-10-27
日用电器(2019年7期)2019-08-07
智能制造(2019年10期)2019-03-23
太空探索(2015年1期)2015-07-18
太空探索(2014年12期)2014-07-12
太空探索(2014年11期)2014-07-12
食品工业科技(2014年5期)2014-03-11