
基于Warping Harness的半主动光学技术发展研究
2023-01-30 03:16张奔雷王富国
激光与红外 2022年12期
张奔雷,杨 飞,王富国
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
1 引 言
望远镜主镜作为望远镜系统中最关键、口径最大的光学元件,其支撑技术一直是望远镜技术发展要解决的核心问题之一[1]。对于4 m口径以下的小口径主镜一般采用柔性的被动支撑形式,对于4 m及更大口径主镜则采用主动支撑形式[2]。
大口径望远镜如果采用主动支撑,将增加支撑系统的复杂程度,从而大大提高望远镜制造成本。又由于被动支撑是完全被定义的支撑结构,虽然结构上可采用柔性铰链等形式来提高镜面面形精度,但对于低频误差并不能起到较好的校正能力,很难达到预期的支撑效果。为解决这一矛盾,基于Warping Harness(以下简称WH)的半主动光学技术应运而生,该技术主要校正空间频率接近于0的镜面波前误差[3]。
2 WH校正理论基础
WH机构是由应力抛光技术演变而来。现在则主要用于周期性校正镜面低阶面形误差。校正对象有:主镜加工残余误差、镀膜引起的应力扭曲误差、温度变化以及重力载荷引起的面形误差等。
原理上,WH机构通过改变Whiffletree机构的零力矩点位置,使主镜底支撑系统中的封闭力系发生改变,达到调节镜面低频误差的作用。从自由度的观点上看,WH机构在底支撑硬点位置的三个局部自由度的基础上,通过自身柔性为支撑系统释放微弱的局部自由度,可以在很大程度上平衡原有支撑系统布局与增加调整环节之间的矛盾,其微弱的自由度介于主被动支撑之间,所以被称为“半主动支撑”。
实际实施中,WH都是基于Whiffletree设计的,它应用的前提是可以通过树形扩展方式来传递校正力矩,进而改变支撑力分布,以达到调整面形的目的[4]。若单个电机输出单位力产生的镜面变形为ωi(x,y),根据线形叠加原理,当促动器输出Fi时,镜面总变形为:
(1)
设面形误差为ωerror,C为WH的刚度矩阵,校正产生-ωerror镜面变形时,校正力f满足:
Cf=-ωerror
(2)
当面形误差用m项Zernike多项式zi(i=1,2,…,m)表达时,上式变为:
(3)
式中,n为电机个数。经最小二乘法求得校正力f为:
f=-(CTC)-1CTωerror
(4)
3 WH在地基望远镜中的应用
3.1 Keck望远镜
凯克(Keck)望远镜由美国于1993年建于夏威夷莫纳克亚山顶,是世界上现役口径最大的地基望远镜之一。其主镜口径为10 m,集光面积约76 m2,由36块对角距离1.8 m、厚75 mm的六边形子镜拼接而成,主镜材料为热膨胀系数接近0的微晶玻璃[5]。
Keck子镜轴向采用36点被动支撑(如图1所示)并于枢轴上装备30个可通过手动调节第二级横梁上的螺旋机构对子镜面形进行调节的铝制弹性叶片,其结构如图2所示。这是WH结构在望远镜中的首次应用。

图1 凯克望远镜子镜支撑系统Fig.1 Keck telescope sub-mirror support system

图2 Keck望远镜中使用的WH结构Fig.2 WH structure used in Keck telescope
经仿真及实验知,WH结构可以校正该子镜的前四阶Zernike像差,校正后镜面面形误差RMS值从110 nm降低到19 nm,如图3所示。由于凯克望远镜的WH机构调节方式为手动调节,调节较为费时费力,因此调节能力有限且无法实时反馈调节[6]。

图3 Keck子镜经WH结构校正前后对比Fig.3 Comparison of Keck sub-mirror before and after WH structure correction
3.2 GTC望远镜
加那利望远镜(GTC)于2007年在西班穆查丘斯罗克天文台正式投入使用。其主镜口径为10.4 m,集光面积约73 m2,由36块重量为470 kg的六边形子镜拼成,每块子镜边长为936 mm,对角之间尺寸约为1900 mm,镜面厚度约为80 mm,两子镜拼接缝隙为3 mm,如图4所示[7],子镜材料为热膨胀系数接近0的微晶玻璃。

图4 GTC子镜排列方式及尺寸Fig.4 Arrangement and size of GTC sub-mirrors
GTC的轴向支撑示意图如图5所示,每个子镜采用36点支撑。GTC子镜面形还可通过WH机构来调节,如图6所示。每块子镜轴向支撑系统集成了6个位移促动器,包含带有力传感器的步进电机,通过对弹性杠杆施力使其变形以在Wiffletree机构的第二级关节中引入调节力矩,从而调节子镜面形。

图5 GTC子镜轴向支撑分布图Fig.5 GTC sub-mirror axial support distribution map
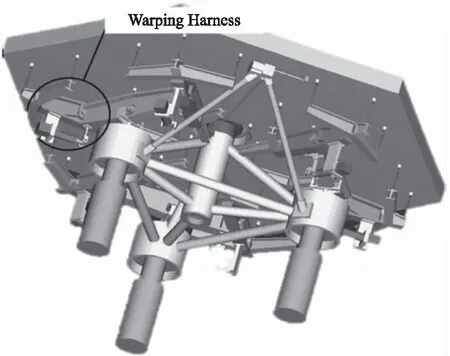
图6 GTC子镜轴向支撑示意图Fig.6 Schematic diagram of the axial support of the GTC sub-mirror
每个子镜面形的校正将由六个促动器从不同方向协同作用,如图5箭头所示。该系统以促动器中传感器应力大小作为反馈进行闭环控制。子镜面形校正主要是为了补偿由支撑系统缺陷引起的面形误差。如:横向子镜边界对齐错误或由于热变形和重力变形造成的子镜低频误差。这些表面形状误差会产生像局部离焦和三阶像散这样的像差[8],经分析和实验表明该机构能够将上述像差减少到其初始值的25 %。
3.3 E-ELT望远镜
欧洲超大望远镜(E-ELT)是由欧洲南方观测站负责研制的地基大口径拼接望远镜,预计2025年建成于智利阿马索内斯山[9]。其主镜口径约39 m,集光面积约978m2,由798块对角尺寸为1.44 m、厚50 mm的六边形子镜拼接而成。每块子镜采用图7所示独立的27点Whiffletree支撑。
由于798块子镜加工制造完成后会有轻微的不同,因此利用WH可以校正由装配和加工制造引起的镜面离焦、像散、三叶草像差[10]。单个子镜一共采用了9个WH组件,如图7所示。

图7 E-ELT子镜底支撑Fig.7 E-ELT sub-lens support
E-ELT所采用的WH机构的如图8所示,其工作方式是由步进电机通过传动箱降速增扭作用于扭簧,扭簧传递扭矩带动扭力管产生转动趋势来重新分配支撑点上的力,扭簧和三脚架之间只传递转矩。该机构的扭簧柔度对输出力矩的精度影响很大,其柔度不仅要与输出力矩相匹配,还要满足与电机输出轴的杠杆原理,从而提高校正分辨率。检测结果表明,主镜未校正前的面形误差RMS值由160 nm降至10 nm,校正率大于90 %[11]。
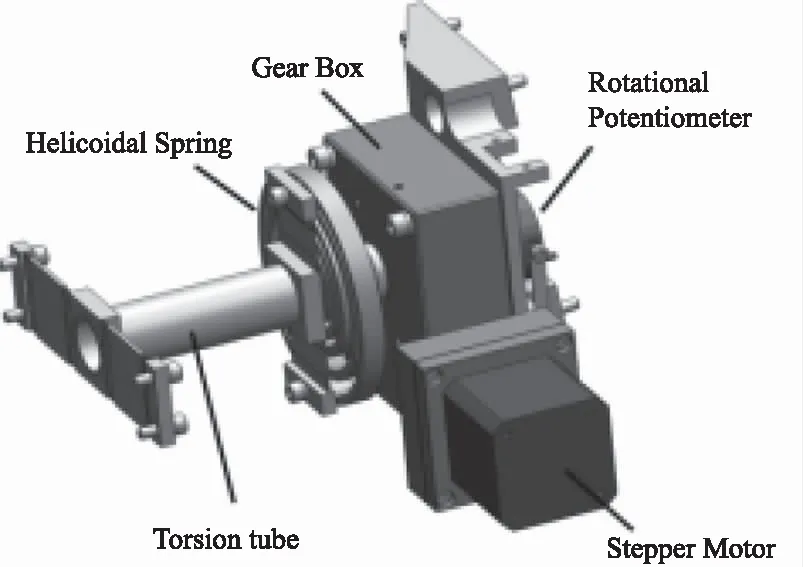
图8 E-ELT中WH机构设计图Fig.8 WH mechanism design drawing in E-ELT
3.4 TMT望远镜
30 m望远镜(TMT)是美国和加拿大等多家科研单位合作研制的新一代地基大口径拼接望远镜,预计2025年建成于美国夏威夷的莫纳克亚山上[12]。TMT主镜口径为30 m,集光面积约655 m2,主镜近轴曲率半径为60 m。主镜面为双曲面且由492块六边形非球面子镜拼接而成,每块子镜对角距离为1.44 m,厚度约40 mm。拼接镜相邻子镜间距为2.5 mm,镜体材料为热膨胀系数接近于0的微晶玻璃[13]。
TMT子镜支撑系统是基于Keck研发的[14]。轴向采用27点Whiffletree支撑,用以承担镜体重量,如图9所示。TMT每块子镜用21个促动器来校正子镜面形,其作用形式如图10所示,分布位置与作用方向如图11箭头所示。中间与外圈箭头对应图12右图中L型板簧,内圈箭头则对应直板簧。

图9 TMT子镜轴向支撑系统Fig.9 TMT′s sub-mirror axial support system

图10 TMT中WH机构作用原理Fig.10 Principle of WH mechanism in TMT

图11 TMT子镜中WH分布Fig.11 WH distribution in the TMT sub-mirror
TMT总共配备了10332个WH机构。每个弹性叶片的根部都贴有用于闭环控制的全桥应变计,同时弹性叶片的柔度必须与输出力矩相匹配,使得电机输出位移在一个合理的行程以保证促动器输出精度。
图12中弹簧叶片的设计便于二级力矩输出,对于低阶面形误差,其校正力矩极其微小,所以对促动器精度要求非常严格,中间开槽折叠设计为了增加促动器输出位移行程的同时减小弹性叶片的尺寸,由杠杆原理知促动器行程越大,输出精度越高。图中右边L形弹性叶片由两个互相垂直的弹性叶片组成,意在保证两叶片受促动器垂直向上或向下作用力时坐标中心处产生的力矩耦合一致性,以至于即使弹性叶片处于极限位置时,也能确保执行机构中只有纯轴向力,这种结构形式大大减小了力促动器丝杠组件的磨损,有助于以较低的功率实现较高的调整精度。

图12 直板簧和L型板簧Fig.12 Straight leaf spring and L-shaped leaf spring
使用WH对单块TMT子镜进行校正,结果表明WH对离焦、像散、彗差等低阶像差起到了很好的校正效果,校正前后效果如图13所示[15]。
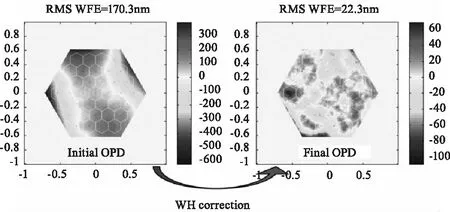
图13 TMT子镜经WH校正前后面形Fig.13 The shape of the front and back of the TMT sub-mirror after WH correction
3.5 SEIMEI望远镜
3.8 m新技术望远镜(SEIMEI)位于日本冈山县的冈山天文台。如图14所示,主镜口径为3.78 m,曲率半径为10 m,非球面系数为-1.0346,由18块对角距离1.2 m、厚50 mm、质量为70 kg的扇形子镜拼接而成,子镜间拼缝为2 mm,观测波长为0.35~4.2 μm,同时采用了自适应光学和主动光学技术。

图14 日本SEIMEI望远镜Fig.14 Japan′s SEIMEI telescope
图15显示了SEIMEI望远镜子镜的排列顺序。数字1至6表示内圈子镜,数字7至18表示外圈子镜[16]。SEIMEI子镜支撑组件包括9点whiffletree结构以及WH机构,每块子镜由3个促动器通过Whiffletree控制镜面倾斜和上下运动。由于结构上的残余应力和位置误差而导致的子镜的形状误差通过促动器带动连接在每个whiffletree组件上的两个WH板簧产生力矩进行校正。这种校正系统改变了具有六个自由度的低空间频段的子镜面形,其结构遵循了Keck望远镜和TMT望远镜的设计[17]。
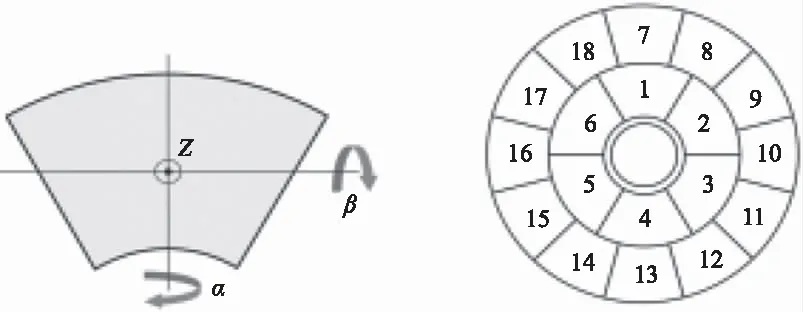
图15 SEIMEI望远镜子镜排列形式Fig.15 Sub-mirror arrangement of SEIMEI telescope
3.6 归纳与分析
WH机构在望远镜中的应用逐渐成熟且趋于多样化,表1列出了上文所述5台拼接式望远镜主镜相关结构参数。

表1 使用WH机构的5台望远镜参数Tab.1 Parameters of 5 telescopes using WH organization
分析上表参数知:
1)WH机构主要应用在子镜低频误差的校正中,该类误差来源于重力或环境温度对支撑系统的影响。由于其校正力较小,所以适用于径厚比大、镜体刚度较小的拼接镜面形的调节。
2)WH机构能调节局部多自由度的同时还拥有被动支撑的高谐振频率,通常状态下支撑点数的增加会提高WH的调节能力与调节精度。
3)WH机构从手动调节发展到如今在各拼接镜上以电机闭环驱动调节,随着电机驱动及反馈技术的不断提高,其校正效率也越来越高,这也从侧面反映了WH机构可移植性的特点。
4 半主动光学技术向其他领域望远镜拓展的可行性研究
4.1 空间望远镜
空间望远镜工作位于大气层之上,其主镜支撑技术是空间望远镜研制过程中的关键技术。所以研究空间望远镜支撑技术,提升其抵抗外界环境干扰的能力,保证主镜面形精度和支撑结构稳定性,是实现高质量成像的保障。表2总结了国外主流大口径空间望远镜主镜与支撑系统参数。
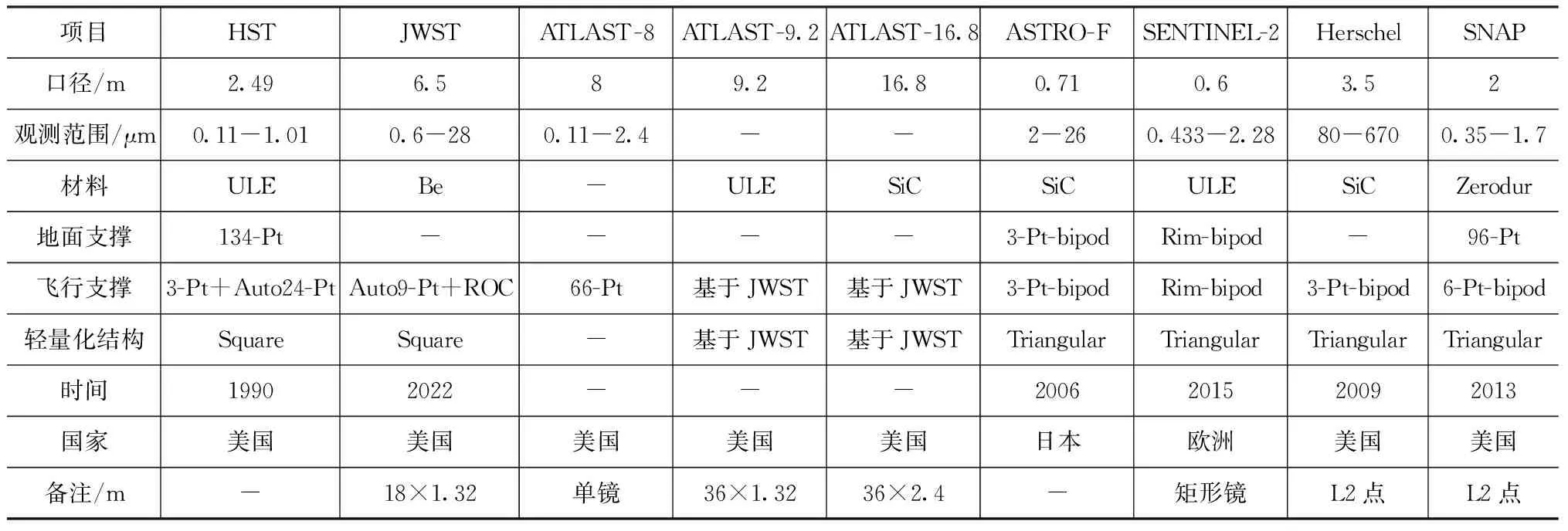
表2 国外空间望远镜主镜与支撑系统参数[18-26]Tab.2 The main mirror and supporting system parameters of foreign space telescopes
总结表2可知:
1)小口径空间望远镜基本采用bipod柔性结构来应对环境变化对镜面造成的误差。
2)受限制于运载火箭直径及镜面加工技术,目前能制造最大的单体空间望远镜口径为8 m。在地基拼接望远镜发展的同时,空间望远镜也开始向拼接镜方向尝试,其中以JWST为代表。
3)拼接望远镜支撑系统在地基与天基之间是有区别的,地基主要对镜面三个自由度(tip、tilt、piston)进行调节,而天基入轨后需将子镜展开并组合成一整块主镜,所以要对子镜全自由度调节。对于未来更大口径的空间拼接望远镜来说,采用主动或半主动支撑来调节子镜自由度和面形将是必须,但这将增加支撑系统成本和复杂程度。
4)空间大口径望远镜在地面的重力环境下加工、装调和检测,进入太空后由于重力的释放导致各部件的位置精度和主镜面形精度受到影响。
5)太阳辐射区和非辐射区将有很大温差,同时望远镜自身元器件的散热使其处于温变环境中,不同材料间热膨胀差异将导致各结构件之间产生不同程度的变形和热应力,进而影响望远镜面形精度和各部件相互位置精度。
综上,由于空间望远镜运行在微重力或无重力环境中,运行时重力对镜面造成的影响较小,但是温度变化、加工及装调误差、重力释放导致的镜面低频误差是被动支撑不能有效校正的。因此,研究在空间望远镜支撑结构中采用WH结构来校正面形是非常有必要的。
4.2 球载、机载临近空间望远镜
临近空间望远镜为减少大气对观测性能的影响工作在近地10~100 km的高空,由热气球或飞机将其运至近地空间处进行科研观测,表3列举了具有代表性的BLAST球载望远镜及SOFIA机载望远镜相关结构参数。

表3 BLAST和SOFIA望远镜主镜系统参数[27-28]Tab.3 Parameters of the primary mirror system of BLAST and SOFIA telescopes
分析表3数据总结如下:
1)由于气球载望远镜发射风险高及回收麻烦,所以对望远镜成本及整体质量的控制严格,以BLAST为例,整体使用碳纤维材料并采用轻量化结构来降重。该望远镜运行于微重力环境下的40 km高空,重力对镜面形状影响不大,所以采用6点柔性被动支撑。升空时,由于重力卸载引起结构间位置精度变化、高空温度不均匀引起的结构间应力不均及风载引起的镜面振动,将导致镜面产生低频误差,对于由多种扰动引起的镜面误差仅靠柔性被动支撑是无法有效校正的。
2)机载望远镜SOFIA工作在13.5 km高空,同样为降重采用一系列轻量化结构。观测时镜面误差主要来自飞机发动机的振动以及包括驻波在内的航空声学载荷等。
综上,球载、机载望远镜主镜误差主要来自于高空重力卸载、温度变化、风载或发动机振动、航空声学载荷。采用的柔性被动支撑无法对主镜面低频误差解耦,所以在预算和整体质量允许的情况下,将半主动光学技术引入球载、机载望远镜主镜面形校正中是有一定意义的。
4.3 车载、船载光电设备
车载、船载光电设备包括车载望远镜、车载光电经纬仪及船载光电经纬仪。其中车载设备由载车、经纬仪或望远镜、圆顶、支撑系统等组成。船载光电经纬仪包括承载舰、经纬仪、圆顶等。工作时车载设备支撑系统将载车撑起调至水平,圆顶打开露出望远镜或经纬仪对目标观测或测量[29]。船载经纬仪对飞行物体进行测量时,舰船处于航行状态[30]。下面就车、船载光电设备运行环境及主镜面形误差源进行讨论并分析。
1)大口径车载、船载光电设备主镜支撑方式大多为被动Whiffletree支撑。
2)对于车载平台来说,大口径光电设备主镜面形主要由自重、支撑系统缺陷、载车调平误差、温度变化导致的结构间不均匀膨胀、观测时载车发动机传至镜面的振动等因素影响。
3)对于船载平台来说,主镜面形误差源主要为包括温度和湿度变化引起的各构件膨胀不均匀;船受到的振动、冲击传至镜面引起的镜面面形误差。同时镜面支撑系统缺陷、加工和装调误差也是影响主镜面形不可忽略的因素。
综上,车、船载光电设备运行环境恶劣,外界干扰多且复杂。由于该类设备支撑系统多为被动支撑,主镜面形难以保证。所以为有效校正主镜面低频误差,提高观测精度和效率,将半主动光学技术拓展至上述支撑系统中是有必要的。
5 结论与展望
本文列举了5台地基大口径望远镜的镜面支撑系统中采用的WH结构及作用方式。其次按照空间顺序列举了国外典型空间、机载、球载大口径望远镜主镜及支撑结构参数,总结分析这几类望远镜工况及主镜面形误差源。最后简单介绍了车载、船载光电设备的基本组成,分析了两种光电设备运行工况及主镜面形误差源。同时分析了将半主动光学技术引入上述设备的可能性。
基于WH的半主动光学技术在地基大口径拼接望远镜中的普遍应用引导我们对它的多元化探索,如果该技术在国内地基、天基望远镜的研制中能广泛应用,不仅可以有效地校正由主镜制造、装配、温变引起的镜面低频误差,而且可以降低研制成本。因此对该技术的研究和开发将为我国望远镜研制工作提供强大的技术支持。
猜你喜欢
荆楚理工学院学报(2022年2期)2022-09-16
航天返回与遥感(2022年3期)2022-07-07
数学小灵通·3-4年级(2022年5期)2022-06-01
快乐语文(2021年34期)2022-01-18
科技信息·学术版(2021年8期)2021-01-10
VOGUE服饰与美容(2019年10期)2019-12-02
航天返回与遥感(2018年2期)2018-05-17
郑州大学学报(工学版)(2018年3期)2018-05-03
中国光学(2017年4期)2017-08-01
中国美容整形外科杂志(2016年11期)2016-07-18
