
激光捷联导引头线性区扩展方法研究
2023-01-30 03:16胡绍云周国家李黎明李海廷
激光与红外 2022年12期
胡绍云,周国家,鲁 强,李黎明,李海廷,周 毅
(西南技术物理研究所,四川 成都 610041)
1 引 言
激光捷联导引头在结构上与弹体固连,光学系统的瞬时视场即为捷联导引头的总视场。与框架式导引头相比,由于没有随动平台,其总视场相对较小。为提高捷联导引头制导精度,需要提高其视场范围和线性区范围。由激光导引头测角原理可知,激光导引头线性区受制于激光探测器靶面尺寸和光学系统F数,在四象限探测器靶面尺寸固定的前提下,想要从硬件上扩展导引头视场范围和线性区范围,必须降低光学系统的F数,当导引头设计作用距离固定时,相应的光学系统入瞳直径也确定了,要降低光学系统F数,只能减小光学系统焦距,受制于导引头光学系统像差及测角精度等因素的限制,光学系统F数不能无限制减小,相应的导引头测角线性区范围扩展受限。
因此,在目前的硬件条件下,要想扩大目前激光导引头测角线性区,就只能改进或优化软件算法。本文提出了一种软件优化算法,可将激光导引头线性区向外扩展,扩展后的激光角度测量值呈粗略线性分布。
2 激光测角原理
激光测角系统一般由光学系统、四象[1-2]限探测器及前放组件和激光信号处理器等部分组成。光学系统用于采集目标反射的激光信号,并在四象限探测器靶面上形成光斑半径为r的均匀光斑,光斑中心位置为(x0,y0),激光探测器的四个象限分别将所覆盖的激光能量转换成电流信号,再经过跨阻放大器和高速模数转换进入激光处理器系统,激光处理器系统对激光信号进行脉冲展宽、峰值保持等处理,输入和差比幅电路进行目标位置解算,利用一定的算法计算探测系统视轴和探测系统与目标连线之间的夹角,得到目标相对于激光测角系统的俯仰和方位角信息[3]。
激光回波信号在四象限探测器靶面形成的光斑示意图如图1所示,o-xyz为四象限探测器靶面坐标系,在此坐标系内将靶面划分为ABCD四个象限。通过归一化和差算法可得到光斑中心相对于探测器坐标系的位置[4-5],即
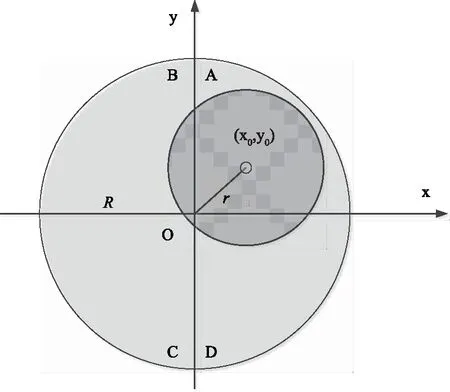
图1 四象限探测器靶面光斑示意图Fig.1 Schematic diagram of laser beam on the four-quadrants detector

(1)

(2)
式中,Si,i=A,B,C,D分别表示探测器四个象限上被光斑覆盖的面积,Pi,i=A,B,C,D分别表示探测器四个象限中光斑所占的激光脉冲峰值功率;k是比例因子,令探测器圆形靶面的直径为R,根据激光测角线性和光斑直径关系[6-8],当光斑直径取最优时,有r=R/2,此时k=r,则式(1)、(2)的有效范围为{x0,y0∈[-R,R]}。根据光斑中心位置坐标,按式(3)、(4)可计算出探测系统光轴与目标连线的方位夹角θx和俯仰夹角θy:
(3)
(4)
式中,f为光学系统焦距;τ为探测器靶面的离焦量。
3 激光测角线性区算法扩展方法
当激光光斑偏离探测器靶面中心较远时,光斑只在探测器靶面的其中1个或2个象限有分布,无法充满3个或4个象限,即公式(1)或(2)中后两项均为0,其计算得到的角度值基本不变,即此时目标角度已超出导引头的工作线性区[-q,q],处于线性区外,如图2所示[9-11],此时激光处理系统只能给出目标的大致方位,无法给出较准确的测量结果。为提高激光导引头在线性区外测角的精度,设计采用软件算法补偿的方式。

图2 探测器线性响应示意图Fig.2 The responsive curve of the four-quadrants detector
假定激光导引头探测器靶面处光斑分布均匀,光斑形状为圆形,光斑半径为探测器靶面半径的一半,当目标处于导引头测角线性区外时,仅有一部分光位于探测器靶面上,如图3所示,此时光斑质心位于极坐标(ρ,θ)位置,根据几何位置计算,该部分激光光斑的响应电压与光斑离探测器靶面中心的距离严格成线性比例关系,其线性关系图如图4所示,其线性相关系数接近1,线性度较好。据此可根据探测器接收到的剩余光斑总能量与线性区内得到的全光斑总能量之比算出光斑质心相对于探测器质心的距离,剩余光斑总能量为当前位置探测器光电转换得到的积分电信号总值,全光斑总能量可通过某一弹目距离下线性区内测得的积分电信号总值和当前弹目距离值按公式(5)计算得到:
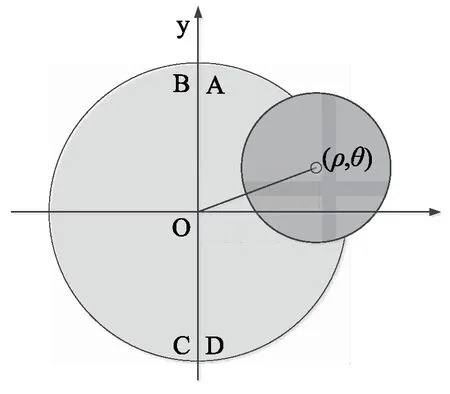
图3 光斑位于探测器线性区外示意图Fig.3 Schematic diagram of laser beam beyond the linear range of the four-quadrants detector
(5)
式中,Q2为当前位置光斑总能量;Q1为为弹目距位置1处光斑总能量;R1为位置1处弹目距离;R1为位置2处弹目距离。
通过得到的剩余光斑能量响应值与全光斑能量响应值之比,就能根据图4所示的光斑离靶面中心距离与线性区内外光斑能量比关系确定光斑质心与探测器靶面中心的距离[12],从而确定目标位置的极坐标ρ。
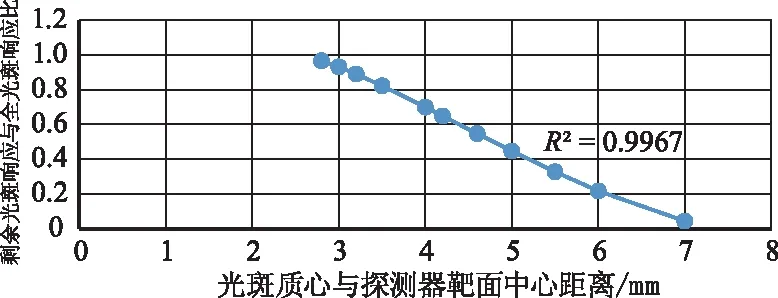
图4 光斑离靶面中心距离与线性区内外光斑能量比关系示意图Fig.4 The relation of the distance between center of beam and center of detector and the beam energy ratio in the linear range and out of the linear rang
当目标光斑偏离探测器靶面线性区时,如图3所示,光斑在探测器靶面的第A、D象限均有分布,此时探测器仅有A、D象限有电信号输出,两象限剩余光斑输出比值与光斑质心位置的极坐标θ值近似成3次多项式关系,如图5所示。

图5 两象限剩余光斑响应比值与光斑质心位置θ关系Fig.5 The relationbetween the responsivity ratio of residual beam in two different quadrants and the position of the beam θ
通过测量得到的两象限剩余光斑电信号响应的比值,可以计算得出目标光斑质心位置的极坐标θ值,进而计算得到光斑质心相对于探测器靶面中心O的横坐标值为Δx=ρcosθ,纵坐标值为Δy=ρsinθ,将计算结果代入公式(1)~(4)即可计算得出目标光斑的俯仰、方位角[13-14],通过对测角系数的现场标定可以得到真实准确的目标角度位置,其测量结果呈准线性分布,从而实现了对激光导引头线性区的扩展。
以上讨论的是目标回光剩余光斑在线性区外占有两个象限的情况,当目标回光的剩余光斑只占有一个象限时,即探测器只有一个象限有光电信号输出时,如图6所示,此时目标光斑的极坐标ρ值可以根据图4所示的光斑离靶面中心距离与线性区内外光斑能量比关系准确确定,但θ值无法准确确定。
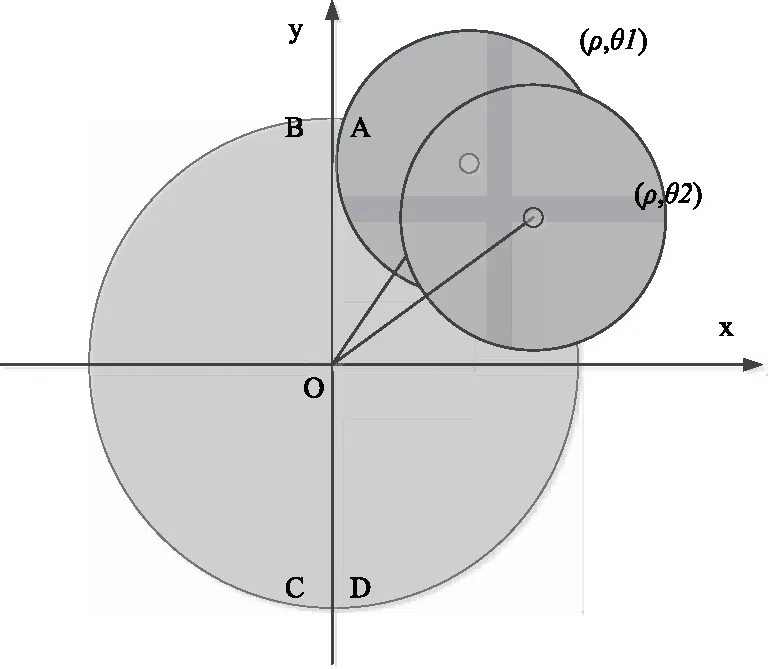
图6 光斑位于探测器线性区外单一象限示意图Fig.6 Schematic diagram of beam out of the linear range in single quadrant
ρ值确定表明目标质心与导引头视轴中心的距离是准确可靠的,虽然θ值无法确定,但可以确定其分布的象限,其角度范围可根据象限大小大致确定,如当其ρ=4 mm时,其角度范围为{θ∈[40°,50°]},此时可以将该范围内的一个随机数赋给θ值,从而计算得出目标相对于导引头视线的大致俯仰、方位角,得到目标的粗略角度位置。
4 结 论
当激光导引头工作在设计的线性区外时,在确定的激光导引头硬件参数条件下,通过对激光探测器输出电信号的综合处理与运用,从软件算法方面可将激光导引头线性区向外大范围扩展,当目标剩余光斑占有两个象限时,经计算、标定,其测量结果较准确,扩展后的测量结果与线性区内测量结果呈准线性分布,当目标剩余光斑仅占有一个象限时,其质心相对于导引头视轴的距离可精确确定,但其给出的俯仰、方位角存在较大偏差,通过限定光斑所在象限的角度范围,可得到目标的粗略角度位置。该方法理论上可将激光导引头的准线性区向外扩展,大幅度提高激光导引头线性区外的测角精度,从而大幅度提高激光导引头的搜索视场范围和制导精度。
猜你喜欢
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
中国医疗美容(2015年1期)2015-07-12
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
