基于分数阶PIλ的STATCOM控制策略仿真研究
2023-01-31 01:47唐东成杨业鸿何磊
电子制作 2023年1期
唐东成,杨业鸿,何磊
(1.怀化职业技术学院电子电气工程系,湖南怀化,418000;2.中国铁路广州局集团有限公司怀化供电段,湖南怀化,418000;3.湖南国防工业职业技术学院武器装备维修学院,湖南湘潭,411200)
0 前言
目前STATCOM等装置广泛用于电力系统无功补偿,实现对电网电压的调控。电网电压的稳定性控制是电力系统稳定的重要组成部分。需要无功补偿装置能快速响应为电力系统提供足够的无功功率,保证发出的无功功率与消耗的无功功率保持平衡。
由于STATCOM装置在dq坐标系下的数学模型具有非线性、强耦合的特点[1],控制器设计比线性系统控制器设计困难。文献[2]提出坐标变换的基本思路简化STATCOM控制系统模型,直流电压外环,电流内环的控制策略,并设计PI控制器。文献[3-5]将分数阶PID控制器应用到STATCOM装置控制系统,但分数阶PID参数整定较困难。目前参数整定的方法主要有遗传算法[3],遗传粒子群优化[4],模糊算法[5],频域设计法[6-7]等。
本文首先分析并建立了STATCOM装置的数学模型,采用坐标变换的方法将电流分解到电压矢量方向和与之垂直的方向,便可对无功电流分量与有功电流分量进行解耦控制,并设计分数阶PI控制器。采用频率响应设计方法,整定控制器参数。最后对系统进行了仿真研究,验证了控制系统的可行性。
1 STATCOM数学模型
STATCOM装置的电路拓扑结构由全控型器件组成的三相桥式逆变器。其主电路结构如图1所示。
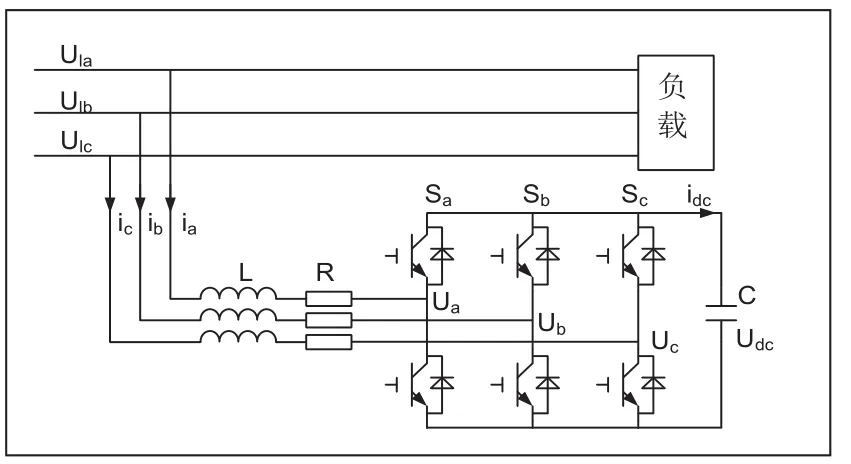
图1 STATCOM主电路结构
STATCOM装置中主要参数有交流侧等效电抗L;直流侧电容器为C和电力电子器件与电抗器的等效电阻R。由于STATCOM三相坐标系下的数学模型复杂、变量多,不便控制系统设计。因此,通过坐标变换将三相坐标系的数学模型等效成dq坐标系,简化了数学模型。


图2 d-q 坐标图
公式(1)中,uld、ulq为电网侧d、q轴电压;id、iq为STATCOM装置交流侧d、q轴电流;电源角频率为ω;在旋转dq坐标系中,假设电压为正弦波形,电压矢量分解到d轴和q轴后,电压分量为直流量;同理,在同一旋转坐标系下电流矢量的分解量也为直流;如果将电压、电流矢量分解到d′-q′坐标系下,并保证d′轴方向与电网侧电压空间电压矢量Ul方向相同。即令ud′=Ul,uq′=0。其中得到新的旋转坐标系d′ −q′坐标系,于是通过坐标变换,将原d−q坐标系变换到d′ −q′坐标系上,变换矩阵为其中θ=arctan (uqud)为两个坐标系的夹角;令则原系统模型经坐标变换后变为[2]:
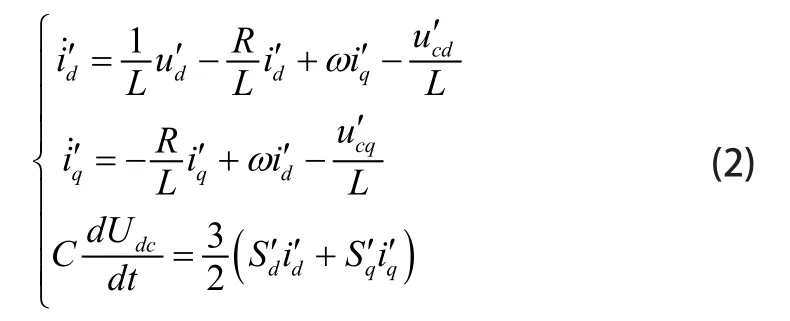
在上述数学模型中,使得控制策略更容易实现。
2 分数阶PIλ控制器设计
由Podlubny教授提出的分数阶PIλDμ控制器,比整数阶PID控制器增加了两个可调参数λ,μ,分别为积分器与微分器的阶次。分数阶PID控制器的阶次可以在0<λ,μ<2范围内相对任意地选择。因此,分数阶PIλDμ控制器的形式更灵活,控制效果可能会更好。
典型分数阶PIλDμ控制器的数学形式为:

与整数阶PI相比,除了比例、积分系数外,分数阶PIλ控制器还可以对阶次λ进行设计。其数学形式为:

本文采用直流电压外环控制,使逆变器直流侧电容电压稳定,并利用电压偏差经分数阶PIλ控制输出作为电流内环的给定值id′_ref。为了补偿负载消耗无功功率,采用无功功率电流跟踪控制,即直接检测负荷侧无功电流作为给定值iq′_ref与STATCOM实际输出无功电流i′q的偏差经PIλ控制器输出。控制系统框图如图3所示[2]。

图3 STATCOM控制系统结构框图
考虑变换器的输出延时,忽略反馈通道时间延时;可得到电流内环等效控制框图如图4所示。其中KPWM为变流器等效增益;T为变流器开关周期的1/2[4]。
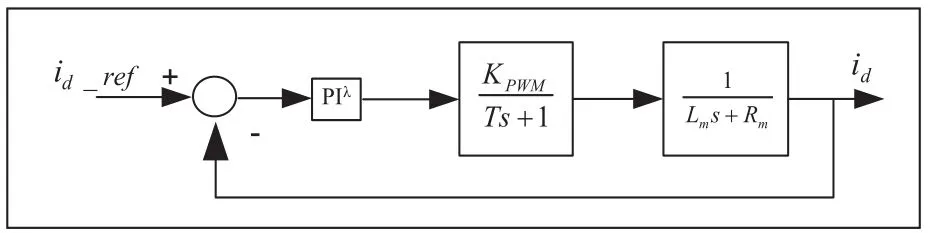
图4 电流内环控制框图
为控制直流侧电压,设计了电压外环控制器;可得电压外环等效控制框图,如图5所示。其中Gi(s)为电流内环闭环传递函数;K为时变环节的最大比例增益;Te为电压采样小惯性时间常数。

图5 电压外环控制框图
本文采用基于频率响应的设计方法,给定系统相角裕度φm和截止频率ωc,可以得到以下分数阶PIλ控制器参数的整定规则[6-7]:
(1)控制系统开环传递函数截止频率ωc处相角特性为:

(2)控制系统开环传递函数截止频率ωc处幅值特性为:

(3)控制系统鲁棒性条件,当系统增益分别增加或减少20%时Bode图中相位对频率的导数在截止频率ωc处为0,系统响应超调量基本不变,具有很好的鲁棒性。即系统开环传递还需满足以下关系式:

■2.1 电流环控制器参数设计
由图4所示,电流环开环系统模型为:

其中,截止频率ωc=10rad/s,相角裕度φm=50°;KPWM=380,T=5×10-5s,Lm=0 003H,Rm=0 5Ω;采用频率响应设计方法,可以得到电流环控制器参数KPi=0 011,Kii=0 59,λi=1 47。
■2.2 电压外环控制器参数设计
其中,截止频率ωc=10rad/s,相角裕度φm=70°;K=0 75,Te=2×10-6s,C=0 04F;采用频率响应设计方法,可以得到电压环控制器参数KPV=0 33,KiV=0 59,λV=0 72。
3 仿真研究
为验证STATCOM控制系统性能特性。利用MATLAB仿真软件建立了含STATCOM装置的单机无穷大系统模型,仿真参数设置如下为:
电网线电压有效值为380V,频率为50Hz,STATCOM装置开关器件的开关频率为10kHz,STATCOM装置交流侧等效总电阻Rm= 0.5Ω,连接电抗Lm=3mH,直流侧电容值为C= 4000µF;直流侧电压给定值为800V,无功电流给定值为iq′_ref。假设负载消耗有功功率Pload= 1 0kW,消耗无功功率Qload=8kVar。

图6

图7
仿真结果如图8所示,在0-0 1s时,电力系统没有接入STATCOM无功补偿装置,此时负荷消耗的无功功率全部由电网提供。当0 1s接入该装置后,无功功率由STATCOM装置为负荷提供,减少电网无功电流的输出,因此补偿后电网的负荷电流低于补偿前电流。未接入STATCOM时,输电线路电压Ula超前线路电流ila约38 7°,输电线路的功率因数为0 78。接入STATCOM装置后,输电线路的功率因数接近1;输电线路电压Ula与线路电流ila趋于同相。

图8 接入STATCOM装置前后电网电压电流波形
在接入STATCOM装置前后采用PI控制器、分数阶控制器PIλ均能使无功功率发生装置在较短的时间作出响应。但使用分数阶PIλ控制器可使无功功率响应过程更加平滑。通过仿真验证了分数阶PIλ控制器可行性,在性能上优于传统PI控制器。
4 结论
本文建立了STATCOM系统控制模型,该模型具有强耦合、非线性特点。对此本文采用电压矢量定向方法,通过坐标变换实现有功电流和无功电流分量。采用频率响应设计一般方法,对分数阶PIλ参数进行整定。仿真结果表明,采用分数阶PIλ控制器在保证响应速度的同时,还能较少负荷冲击带来的影响。能快速平稳地维持电网电压。
猜你喜欢
无损检测(2022年6期)2022-07-05
导航定位学报(2022年2期)2022-04-11
汽车维修技师(2019年7期)2020-01-16
重庆理工大学学报(自然科学)(2019年6期)2019-07-16
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
汽车维修技师(2018年11期)2018-05-11
数学大世界(2018年1期)2018-04-12
中学生数理化·高一版(2017年1期)2017-04-25
浙江大学学报(工学版)(2016年4期)2016-12-22
郑州大学学报(工学版)(2015年2期)2015-01-22