
GaN HEMT及GaN栅驱动电路在DToF激光雷达中的应用*
2023-02-09 14:16秦尧明鑫叶自凯庄春旺张波
电子与封装 2023年1期
秦尧,明鑫,叶自凯,庄春旺,张波
(电子科技大学电子薄膜与集成器件国家重点实验室,成都 610054)
1 引言
激光雷达是一种可以快速并精确获取探测目标三维信息的光探测雷达,可以完成对周围环境目标的距离测量并且实现对目标环境的三维成像[1]。相比于无线电雷达,激光雷达使用波长更短的激光作为光源,具有更高的空间和时间分辨率,测量精度更高,抗干扰能力更强并且系统更易小型化等优势。因此,激光雷达在目标识别,高精度三维成像和距离测量方面具有独特优势[2]。这些优势使得激光雷达的应用场景广泛,民用领域有地图测绘、汽车自动驾驶、增强现实和消费类电子产品[3-6],军事领域有航空航天、无人机自主导航、地球和太空地图成像[7-8]。DToF(Direct Timeof-Flight)激光雷达可以通过激光的飞行时间直接获取探测目标的距离和三维空间信息,这一能力对于自动驾驶和地图测绘非常有用。随着自动驾驶技术的不断发展,DToF激光雷达在近几年发展迅速并且逐渐成为关注的焦点。
第三代宽禁带半导体GaN高电子迁移率晶体管(HEMT)应用在高分辨率、高工作频率和高输出功率的激光雷达中有着比Si功率MOSFET更明显的优势和巨大的潜力,已经成为现代激光雷达系统发展的一个关键因素。为了能最大程度地发挥GaN HEMT在激光雷达应用中的优势,需要定制高性能的GaN栅驱动电路,因为定制化的高性能GaN栅驱动电路是决定系统性能的关键。DToF激光雷达系统中的激光驱动器在脉冲模式下工作,光脉冲的参数根据应用的不同变化很大[6]。自动驾驶应用中要求DToF激光雷达产生高功率和持续时间非常短的光脉冲,这对激光驱动器的性能提出了很高的要求。本文针对高脉冲功率和短持续时间的DToF激光雷达系统,分析了激光二极管驱动电路面临的设计挑战,GaN HEMT相比于Si基功率MOSFET的优势,以及DToF激光雷达系统中GaN栅驱动电路面临的设计挑战并介绍了适合该应用的GaN栅驱动电路。
2 激光二极管驱动电路面临的设计挑战
DToF激光雷达工作时,激光信号以光脉冲的形式发射和接收。DToF激光雷达系统的工作过程如图1所示,信号处理单元通过计算光脉冲发射时刻t1到接收时刻t2的时间内激光传输的距离可以计算出目标的距离L,L=c(t2-t1)/2,其中c为光速。通过不同反射脉冲的时间差可以计算出不同目标之间的距离并且将目标分解成单个物体。图1中,当来自相邻目标A和目标B的反射光脉冲重叠后,激光雷达系统无法分辨出目标A和目标B的信息。激光脉冲宽度td决定了激光雷达的空间分辨率d,d表示激光在td时间内传输的距离的一半:

图1 DToF激光雷达系统的工作过程

因此,更短的光脉冲td意味着系统更高的距离分辨率。当光脉冲宽度降低后,光脉冲的频率可以随之升高,对目标物体数据的生成速率更快,最终成像后的图像清晰度和流畅度更高[3]。激光雷达依靠来自目标的反射光进行距离检测和目标识别,光脉冲的功率影响反射光的质量,进而影响探测距离,提高光脉冲的功率可以实现更长的射程和更大的检测范围。
自动驾驶应用中要求DToF激光雷达的距离分辨率达到几厘米并且探测范围达到300 m[6,9]。为了避免激光脉冲对人眼造成伤害以及系统热限制,激光脉冲的宽度需要尽可能窄。极高的分辨率、宽检测范围、系统热限制以及人眼安全限制需要DToF激光雷达输出电流脉冲Ipulse的宽度低至1 ns,输出脉冲峰值电流超过100 A[10]。因此,激光驱动器的输出激光电流脉冲需要具有亚纳秒级的脉冲切换时间,高工作频率和高功率。高分辨率和宽检测范围的DToF激光雷达中需要具有低优值(FoM)和低寄生电感的功率开关器件。极窄的电流脉冲宽度和上百瓦的输出脉冲功率要求功率开关器件能够在几百皮秒内完成开关转换,并且具有高的电流和电压额定值,传统Si基功率MOSFET的开关转换时间难以满足要求,具有极低FoM和极低封装寄生电感的GaN功率开关器件可以用于驱动激光二极管产生符合要求的电流脉冲[9-10]。高切换速率、高功率的脉冲电压和电流会在激光驱动器的驱动回路和功率回路中产生高的dV/dt和dI/dt,这需要最小化驱动回路和功率回路中的寄生电感以减小功率开关器件栅极和漏极的振荡,提高系统工作的可靠性。
目前,激光雷达应用中存在2种典型的激光二极管驱动电路,电容放电型和矩形脉冲型[1]。电容放电型激光二极管驱动电路的优点是:电流脉冲持续时间远低于栅驱动电路的最小脉冲时间,减轻了对栅驱动最小脉冲时间的压力;通过功率回路杂散电感产生谐振电流,只需对开关器件栅极开启过程进行控制,应用和控制方式简单;具有稳定的脉冲形状,不容易产生脉冲失真。但是,激光脉冲电流宽度在特定的回路参数下保持恒定,无法调制;对总线电容再次充电的时间限制了激光脉冲频率[11],在高激光脉冲频率下,由于总线电容电压充电电荷量较少导致了不完整的激光脉冲电流和低输出的激光脉冲功率,减小了有效检测距离;此外,该方式通常需要高压电源,这增加了系统成本和尺寸。矩形脉冲型激光二极管驱动电路的优点是:激光脉冲宽度可以调制,脉冲频率更高;从总线电压到地之间小的杂散电感和电阻使得脉冲电流具有亚纳秒极的上升和下降时间,分辨率更高。但是,由于工艺、电压及温度变化的影响,激光电流脉冲的可重复性较差并且上升和下降速度不一致,从而导致图像失真,需要对脉冲电流的峰值和上升、下降斜率进行精确控制,增加了系统成本[12-13]。
3 GaN HEMT与Si功率MOSFET的对比
宽检测范围、高分辨率的激光雷达系统需要实现极窄的激光脉冲宽度、高的激光脉冲频率和高的激光脉冲功率,这对激光驱动器中功率开关器件的性能提出了更高的要求与挑战。窄脉冲宽度和高工作频率需要功率开关器件具有高开关速度和低封装电感。高脉冲功率需要功率开关器件同时具有高的最大脉冲电流能力以及小的导通电阻。激光雷达通常具有多个激光发射通道,小的功率开关尺寸允许各通道紧密排列,从而减小激光雷达的系统尺寸并简化光学元件[6]。
相比于具有同样耐压等级和相近电流能力的Si功率MOSFET器件,GaN HEMT具有更小的导通电阻和栅极优值(QG·RG)[6],其中QG为器件栅电荷,RG为器件内部栅极串联电阻。更小的导通电阻使得脉冲电流峰值更高,更小的栅极优值使得GaN器件的开关速度更快。适用于激光驱动电路增强型GaN HEMT的网格阵列(LGA)封装和晶圆级球栅阵列(BGA)封装如图2所示,相比于采用双排扁平无引脚封装(DFN)的Si功率MOSFET器件,其封装寄生电感更低[6],这使得GaN功率开关器件相比于Si功率MOSFET器件更容易实现器件的最大开关速度。GaN功率开关器件采用更小尺寸的封装,在减小激光雷达系统体积方面相对于Si功率MOSFET器件也具有很大优势。由于GaN功率开关器件更小的栅电荷,更小的栅极寄生串联电阻,更低的导通电阻和更小的封装寄生电感,器件漏端电压下降速度更快,脉冲电流具有更窄的宽度和更高的峰值,使得激光雷达可以在更远的射程内具有更高的分辨率。DToF激光雷达中采用GaN HEMT与Si功率MOSFET的对比如图3所示,在DToF激光雷达驱动电路中,同样耐压等级的GaN HEMT和Si功率MOSFET相比,GaN HEMT漏端电压下降速度更快,脉冲电流宽度更窄,峰值更高。采用GaN HEMT的DToF激光雷达具有更高的分辨率和输出功率,可以获得更清晰的图像。

图2 2种适用于激光驱动电路的增强型GaN HEMT的封装形式

图3 DToF激光雷达中采用GaN HEMT与Si功率MOSFET的对比
4 DToF激光雷达中的GaN栅驱动电路
4.1 GaN栅驱动电路面临的设计挑战
功率开关器件栅极驱动电路是激光二极管驱动电路控制信号与功率开关器件之间的接口,栅驱动电路向功率开关器件的栅极施加电压并提供驱动电流,在功率开关器件的栅极产生栅驱动电压脉冲,该电压脉冲的频率和占空比与控制信号保持一致。在DToF激光雷达应用中,为了能够在几百皮秒内完成GaN HEMT的开关转换,实现1 ns以下的脉冲电流宽度,GaN栅驱动电路需要提供足够大的栅驱动电流。低至1 ns的脉冲宽度要求GaN栅驱动电路从输入到输出的脉冲宽度失真低至几百皮秒,这要求栅驱动中的开启路径和关断路径具有优异的延迟匹配性。激光二极管驱动电路高达几十兆赫兹的工作频率要求系统控制环路有足够小的响应时间,这需要GaN栅驱动电路具有极低的传输延时。极高的工作频率也要求GaN栅驱动电路具有低功耗以减小高频工作时产生的热量。为了保证激光二极管驱动电路的工作可靠性,栅驱动电路需要具有过温和过压保护机制。
矩形脉冲式激光二极管驱动电路中寄生电感的分布和影响如图4所示,VPWM为输入控制信号,VDD为栅驱动电源电压,VBUS为功率级总线电压,DL为激光二极管。为了快速开关GaN HEMT,栅驱动外部的栅极串联电阻(RG)通常为零,高的栅驱动拉电流Isource和灌电流Isink会通过栅驱动的封装寄生电感LP引起驱动内部的电源和地产生较大的抖动,可能导致驱动电路故障。因此,栅驱动需要采用相应的防地弹和电源噪声等措施提高抗噪声能力,并且需要采用低寄生电感的封装形式,比如BGA封装。开启GaN HEMT时,驱动回路中的栅极串联寄生电感(LG)容易引起栅源电压VGS出现幅度较大的过冲,导致栅极过压;关断GaN HEMT后,LG容易在栅极引起幅度较大的振铃,导致器件误开启。LG以及驱动回路和功率回路共有的共源电感LCSI均会衰减器件的开关速度,导致系统分辨率降低并且增加功率管的开关损耗。因此,需要优化栅驱动回路设计以尽可能减小LG,栅驱动和功率管之间需要采用开尔文连接以尽可能减小LCSI。矩形脉冲型激光二极管驱动电路功率回路杂散电感(Lstray)会衰减激光脉冲电流(ID)的上升速度,关断GaN HEMT后Lstray会在GaNHEMT漏源电压VDS和激光脉冲电流中引起振铃,过大的振铃幅度会导致GaN HEMT漏端电压超过其电应力而损坏器件,并且造成系统EMI性能严重下降。因此,需要优化印制电路板(PCB)中功率回路的布线设计以实现尽可能小的Lstray。功率回路最优化设计如图5所示,这是一种具有低杂散电感的功率回路PCB布板方式,其中激光二极管、GaN HEMT和总线电容CBUS放置在顶层,功率回路的返回路径位于PCB板第一中间层并且置于顶层功率回路路径的正下方,该布局、布线方式可以获得最小的功率回路尺寸并且实现磁场自相消[16],从而最大程度减小功率回路杂散电感。采用相同的方式设计驱动回路,也可以实现栅极串联寄生电感的最小化。

图4 矩形脉冲式激光二极管驱动电路中寄生电感的分布和影响

图5 功率回路最优化设计
4.2 DToF激光雷达中的GaN栅驱动电路
目前适用于DToF激光雷达的GaN栅驱动电路分为分立式和单片集成式2种形式。分立式GaN栅驱动电路采用Si基CMOS工艺制作,通过PCB基板或者键合线实现栅驱动和GaN功率管的互联。单片集成式GaN栅驱动电路采用GaN-on-Si工艺或者GaN-on-SOI工艺将GaN HEMT和栅驱动电路集成到一颗芯片上[17-18]。
分立式GaN栅驱动电路如图6(a)所示,分立式方案中,PCB走线的寄生电感存在于栅驱动回路和功率回路中,键合线中的寄生电感存在于栅驱动回路中,这些寄生电感导致了较大的栅极串联寄生电感和共源电感。较大的栅极串联寄生电感和共源电感衰减了驱动速度,增大了开关损耗,高频工作时较高的开关损耗会降低系统效率并且容易引起器件过热。较大的栅极串联寄生电感也使得GaN HEMT开关速度和栅极可靠性之间存在折衷,过大的驱动电流很容易通过栅极串联寄生电感引起GaN HEMT栅极过压或误开启,降低了驱动可靠性。为了保证驱动可靠性,通常加入栅极串联电阻抑制栅极振铃,使栅驱动电流受限,进而限制DToF激光雷达分辨率的进一步提升。因此,在分立式驱动方案中,设计和优化驱动回路以及功率回路布局、布线方式以尽可能减小回路寄生电感,是实现驱动电路和GaN HEMT高速性能的关键因素之一。在分立式GaN栅驱动电路的研究方面,文献[13]中的分立式栅驱动电路采用激光二极管峰值电流校准技术和电流脉冲平衡技术对激光脉冲电流进行精确控制,解决了矩形脉冲型激光二极管驱动电路中激光脉冲电流可重复性差的问题,实现了0.2 ns的脉冲电流上升和下降时间,0.9 ns的脉冲电流宽度和最大200 MHz的工作频率。国外的公司已经有成熟的商用产品,LMG1020、LMG1025-Q1是美国德州仪器公司推出的针对高频应用的分立式GaN栅驱动电路,具有1 ns的最小脉宽输出能力和2.5 ns的极低传输延时,工作频率可达60 MHz,脉冲宽度失真低于300 ps,输出脉冲上升和下降时间低于400 ps,并且具有片上欠压和过温保护功能,非常适用于高分辨率,宽检测范围的DToF激光雷达。日本pSemi公司在激光雷达应用领域也推出分立式半桥GaN栅驱动电路PE29101,其工作频率为40 MHz,最小输入脉冲宽度为2 ns,输出脉冲上升和下降时间为1 ns。
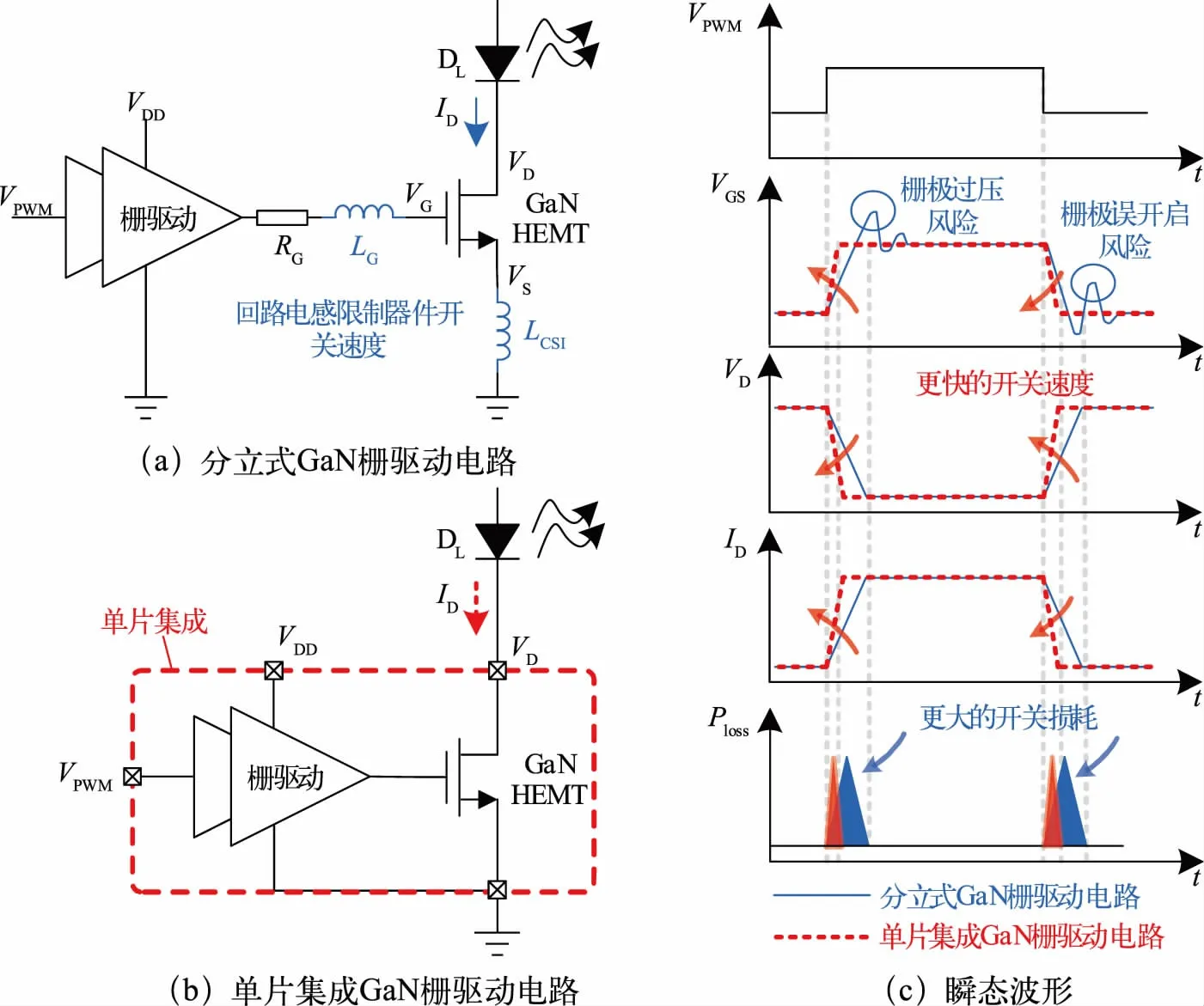
图6 分立式和单片集成式GaN栅驱动电路的比较
单片集成式GaN栅驱动电路如图6(b)所示,单片集成式GaN栅驱动电路的栅极串联寄生电感和共源电感可以缩小到接近零,这可以极大地缓解分立式GaN栅驱动电路设计中存在的矛盾。GaN HEMT开关速度和栅极可靠性的折衷可以得到完美解决,在充分发挥GaN HEMT高速特性的同时可以保证驱动的可靠性。分立式和单片集成式GaN栅驱动电路的瞬态波形如图6(c)所示,相比于分立式电路,单片集成式GaN栅驱动电路可以实现更快的器件开关速度、更低的开关损耗Ploss、更高的驱动可靠性、更短的脉冲电流宽度和更小的系统尺寸。但是,单片集成式方案中PCB走线电感仍然会在功率回路中引入杂散电感,同样需要优化功率回路布局、布线以尽可能减小杂散电感。
在Si基GaN工艺的研究方面,目前还存在一些问题。1)缺少P型GaN HEMT。由于P型GaN HEMT的空穴迁移率远远小于N型GaN HEMT的电子迁移率,设计具有类似上拉和下拉能力的互补反相器,P型GaN HEMT的面积远高于N型GaN HEMT,这导致了互补反相器较差的延时和功耗性能,并且导致了较大的芯片面积[19]。因此,目前的Si基GaN工艺中通常只集成N型GaN HEMT[20]。2)工艺不成熟。同一块晶圆上生产出来的GaNHEMT可能差异明显,往往会在运放的输入端产生200 mV左右的失调电压,需要采用自动清零等电路技术消除失调[20]。3)GaN HEMT阈值电压漂移和电流崩塌。在GaN HEMT开关过程中,当发生栅下载流子俘获时,会造成沟道中二维电子气的变化,栅极下方俘获电荷的不同会导致阈值电压漂移。GaN HEMT阈值电压的漂移可能会严重影响电路的工作状态和性能。载流子的陷阱俘获效应还会严重降低漏极电流,导致器件的导通电阻在每个开关周期下成比例地增加,增大导通损耗。在栅极和源极使用场板可以减小栅极边缘处的电场强度,使电场在源漏之间分布地更加均匀,从而抑制阈值电压漂移和电流崩塌效应[21]。
在单片集成式GaN栅驱动电路的研究方面,文献[22-24]采用耗尽型N型GaN HEMT和增强型N型GaN HEMT构成的传统全GaN反相器中存在静态功耗,并且反相器输出的上升速率远低于下降速率,难以应用在DToF激光雷达中。文献[25]中的反相器无静态功耗,并且采用电荷泵提高了反向器输出的上升速度,但是,电荷泵和驱动级输出功率管栅源电压的充电饱和度受限,反相器输出的上升速度也难以满足DToF激光雷达的要求。文献[26]采用3倍电荷泵提升了驱动级输出功率开关管栅源电压的充电饱和度,但是电荷泵电容上仍然存在一个二极管压降的电压损失。电子科技大学功率集成技术实验室和珠海英诺赛科合作研发了一种适用于DToF激光雷达应用的单片集成式GaN栅驱动电路,芯片采用BGA封装以最小化寄生电感,在20 MHz开关频率下实现10 A的脉冲峰值电流和2 ns的脉冲电流宽度,开启/关断延时为1.98 ns/953 ps,漏极上升/下降时间为435 ps/259 ps[27]。该单片集成式GaN栅驱动电路由偏置级、驱动级和GaN功率开关管3部分构成。偏置级用于增强输入逻辑控制信号的驱动能力,并且可以产生驱动级的死区时间从而减小驱动级的穿通损耗。驱动级用于快速开关GaN功率开关管,通过采用具有自循环转换速率增强型3倍电荷泵的全N型自举反向器完全消除电荷泵和驱动级功率管栅源电压上的电压损失,最终将功率管栅源电压提升至电源电压,增强了对功率开关管栅极的上拉能力,在不衰减传输延时的情况下可以使激光脉冲电流宽度最小化。国外公司已有成熟的商用产品,EPC21601和EPC21603是美国宜普公司推出的针对DToF激光雷达的单片集成式GaN栅驱动电路,其具有2 ns的最小脉宽输出能力和2.9 ns的极低传输延时,工作频率超过100 MHz,漏极电压转换时间小于500 ps,峰值脉冲电流为10 A[28]。
5 结束语
应用于自动驾驶的DToF激光雷达因其高分辨率、宽检测范围、系统热限制以及人眼安全限制等要求,需要激光二极管驱动电路能够输出高切换速度、高功率和窄脉宽的激光脉冲电流。相比于具有相同耐压和电流能力的Si基MOSFET,GaN HEMT具有更小的导通电阻和栅极优值,可以满足DToF激光雷达的要求,并且可以减小系统体积,提升系统效率。为了充分发挥GaN功率开关器件在DToF激光雷达中的优势,具有强驱动能力、高速、低功耗和高可靠性的GaN栅驱动电路和充分优化的PCB布局、布线方案是必不可少的。单片集成式GaN栅驱动电路相比于分立式GaN栅驱动电路可以实现性能更优、成本更低的DToF激光雷达系统。
猜你喜欢
北京测绘(2022年5期)2022-11-22
机械工程材料(2022年6期)2022-08-03
真空与低温(2022年2期)2022-03-30
汽车观察(2021年8期)2021-09-01
兵器装备工程学报(2019年4期)2019-05-05
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年2期)2017-05-04
西南军医(2016年1期)2016-01-23
