弹载双基前视成像雷达解析-迭代定位方法
2023-02-10 12:29詹珩艺李亚超武春风张廷豪
系统工程与电子技术 2023年1期
詹珩艺, 李亚超, 武春风, 宋 炫, 张廷豪
(1. 西安电子科技大学雷达信号处理国家重点实验室, 陕西 西安 710071;2. 中国航天三江集团有限公司, 湖北 武汉 430040)
0 引 言
在弹载末制导或自主寻的等情况下,单基地合成孔径雷达(synthetic aperture radar,SAR)无法获取弹体前视图像[1-3],为解决该问题,双基前视SAR成像构型[4-6],通过合理的构型设计,可获取前视二维高分辨图像,为精确制导、静默突防提供重要信息[7-11]。
在导弹末制导俯冲打击目标时,SAR构型变化差异大,传统弹载打击方式单一靠惯导定位打击,但惯导中的角度误差和速度误差的积累严重影响了打击精度[12-15]。
所以弹载SAR系统在末制导阶段常采用匹配制导[16-17]。弹载双基前视SAR利用其特有构型,获取正前方目标场景的高分辨图像,通过图像匹配算法,得到匹配点信息,利用该位置信息解算出导弹的实际位置,进一步修正惯导误差和航迹偏差[18-19],保证了导弹对目标的精确打击。
国内外许多学者针对单/双基地雷达定位技术均展开了研究。在单基雷达中,文献[20-21]提出基于距离-多普勒(range-Doppler,R-D)模型定位算法,通过迭代法求解多普勒方程、距离方程和地球方程实现对目标的定位,但该方法并未给出初始迭代点选取准则,若初始参数选取有误,该方法将失效。文献[22]提出利用图像匹配算法获得高精度匹配点位置信息,通过数字高程信息选取参考点,结合场景中心点建立欧拉四面体模型,直接解算出弹体实际位置。但是该方法定位精度与参考点选取有关,若参考点选取不合理将直接影响定位精度。文献[23-24]通过求解基于单基SAR斜距非线性方程组,实现对目标或雷达的定位,但求解算法并未给出初始值选取准则,且算法性能很大程度上取决于初始值设置。
在双基地雷达中:文献[25]采用多个脉冲时延差实现定位,通过牛顿迭代法得到辐射源的具体位置,但该方法的定位精度受脉冲个数和脉冲持续时间的影响较大。文献[26]针对双基前视高机动SAR构型,建立R-D方程组,通过迭代法求解,该方法的定位精度与单基地雷达相同,受初始迭代点、惯导数据中的角度信息和速度信息的影响较大。文献[27-28]在R-D模型的基础上,通过邻近像素迭代法获取其他目标位置信息,但该方法只适用于双基SAR移不变模式下的目标定位。文献[29]利用双基SAR收发平台几何关系和距离历程,得到接收雷达和目标点的相对位置关系,但是该方法的定位精度受惯导数据中角度信息的影响较大。
针对上述问题,本文建立了基于图像匹配的弹载双基前视SAR定位模型,提出了最优解析-迭代定位方法。首先,通过双基前视SAR成像算法获取导引头正前方目标的信息。然后,采用图像匹配技术将弹载双基前视SAR图像与SAR基准图进行图像匹配,得到匹配点在弹载双基前视SAR图像中的位置。接着,本文的定位模型是通过弹载双基SAR图像中匹配点的位置所占距离单元的总数与波门采样前沿距离确定的,该距离保证了定位模型的定位精度。最后,通过理论分析直接推导出定位模型的解析解集,并给出最优解析解的选取准则,将该解析解作为初始迭代点,通过迭代搜索得到导弹的最优坐标。该方法解决了传统基于牛顿迭代法解算R-D模型对初始迭代点选取要求严苛,易陷入局部最优解的问题。同时,又解决了惯导中角度误差和速度误差的积累严重影响了打击精度的问题。
1 弹载双基前视SAR定位构型
以场景中任一点O为坐标原点,建立弹载双基前视SAR定位构型,如图1所示。
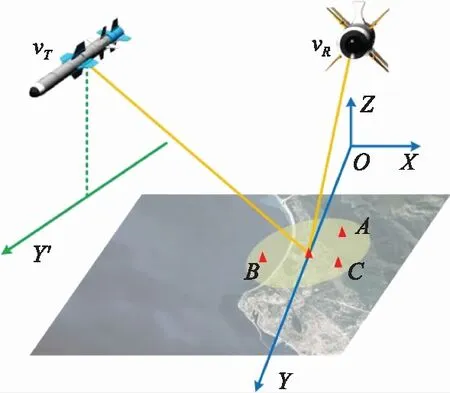
图1 弹载双基前视SAR构型Fig.1 Missile-borne bistatic forward-looking SAR configuration
(1)
2 弹载双基前视SAR定位原理
2.1 定位模型
文献[23-24]提供了一种基于斜距信息的单基SAR定位方法,本文将该斜距信息与弹载双基前视SAR构型结合,建立弹载双基前视SAR定位模型:
(2)
式中:Rbf0为波门采样前沿距离;kA、kB、kC分别为匹配点;A、B、C到波门采样前沿距离单元总数;c为光速;Fs为采样频率;Rr A、Rr B、Rr C、Rt A、Rt B、Rt C分别为收发雷达到匹配点A、B、C的距离;根据双基前视SAR斜距历程,该距离可以表示为
(3)
式中:(xA,yA,0)、(xB,yB,0)、(xC,yC,0)分别为场景中任意3个匹配点的位置坐标。通过求解式(2)和式(3),可以得到接收雷达的准确位置,进而修正接收雷达的轨道参数,实现导弹对目标的精确打击。
2.2 解析-迭代定位方法
针对本文所提弹载双基前视SAR定位模型,为获取接收雷达的准确位置,提出一种最优解析-迭代定位方法。该方法通过理论分析直接得到该定位模型关于接收雷达位置坐标的解析解:
(4)
(5)
(6)
由式(4)~式(6)可知弹载双基前视SAR定位模型有八组解析解,为获取最优解析解,文献[22]提出了一种通过惯导数据确定坐标大小的方法,本文将该方法与定位模型的解析解结合,提出一种新的适用于双基前视SAR定位模型的最优接收雷达坐标的选取准则,如表1所示。
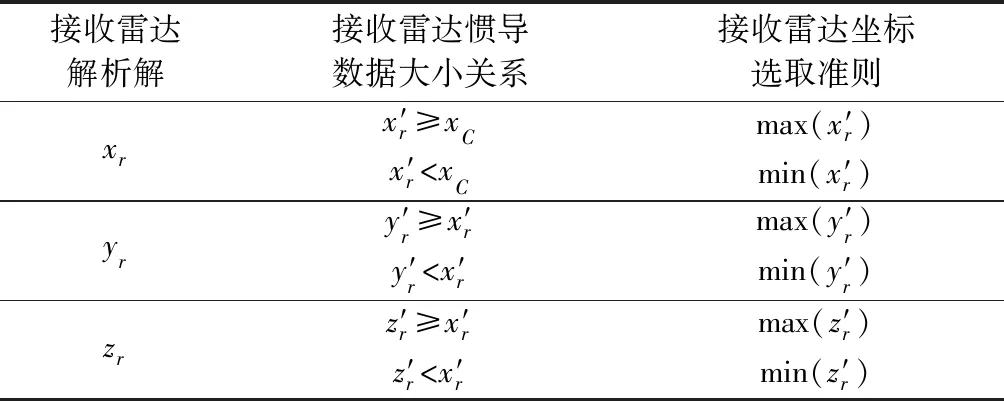
表1 接收雷达坐标的选取准则
通过表1的选取准则得到定位模型的最优解析解(xr,yr,zr),并将该解析解作为初始迭代点,通过迭代搜索得到接收雷达最优坐标。首先需要计算弹载双基前视SAR定位矩阵和定位矩阵的雅可比矩阵。
将式(2)转化为弹载双基前视SAR定位矩阵:
(7)
(8)
结合式(7)和式(8),解析-迭代定位方法具体迭代步骤如下。
步骤 1将解析法解算出的接收雷达位置最优解析解(xr,yr,zr)作为迭代法的初始迭代点,初始迭代次数k=0。
步骤 2按照式(9),计算当前迭代时接收雷达的位置坐标(xr k,yr k,zr k),并用当前迭代的坐标值更新上次迭代的坐标值:
(9)
式中:k为当前迭代次数;(xr k1,yr k1,zr k1)为上次迭代k1时接收雷达的位置坐标;F(xr k1,yr k1,zr k1)为上次迭代k1时弹载双基前视SAR定位矩阵F在(xr k1,yr k1,zr k1)处的值;J(xr k1,yr k1,zr k1)为上次迭代k1时雅可比矩阵J在(xr k1,yr k1,zr k1)处的值。
步骤 3计算当前迭代精度E:
E=max(|xr k-xr k1|,|yr k-yr k1|,|zr k-zr k1|)
(10)
步骤 4判断E是否小于或等于迭代结束精度,若是,则执行步骤5;否则,将当前迭代次数加1后执行步骤2。
步骤 5将迭代得到的(xr k,yr k,zr k)作为接收雷达的近似最优坐标,完成对接收雷达的定位。
综上所述,弹载双基前视SAR几何定位流程如图2所示。
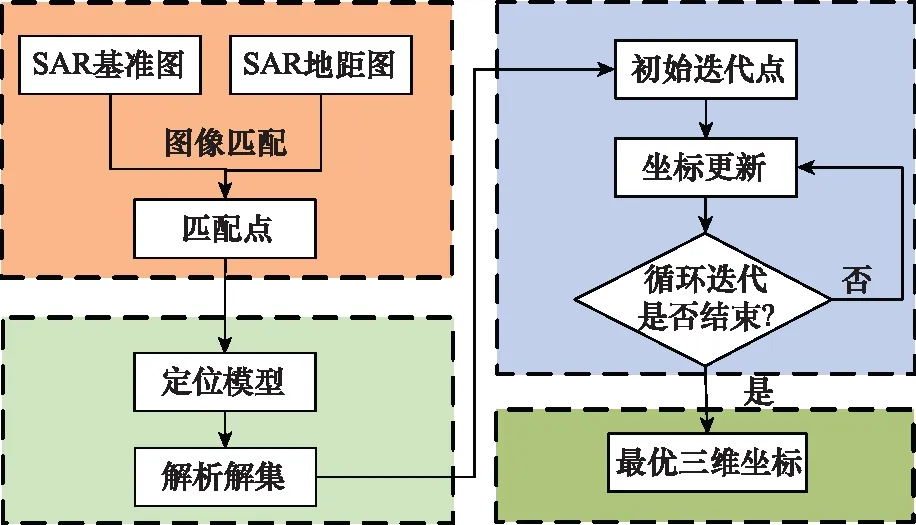
图2 解析-迭代定位方法流程图Fig.2 Flowchart of analysis-iterative positioning method
2.3 定位方法的计算量
快速修正弹体的位置在弹载末制导阶段对目标的打击至关重要。本文所提解析-迭代定位方法首先直接分析推导出定位模型的解析解集,该过程属于常数操作。其次通过选取准则,确立最优初始迭代点,该过程也属于常数操作。最后通过迭代搜索,获取接收雷达最优三维坐标。所以本文所提定位方法的时间复杂度主要与迭代搜索的次数正相关。
根据以上分析,定量给出解析-迭代定位方法的单次浮点运算量:
O1≈[(2M(M-1))M+3M-1]N
(11)
式中:O1为解析-迭代定位方法的单次浮点运算量;M为弹载双基前视SAR定位矩阵的阶数;N为迭代搜索的次数。
3 定位误差分析
以上分析均是在无误差情况下得到的结论,而在导弹末制导阶段,由于收发平台的高机动性,弹载双基前视SAR构型下发射雷达会偏离理想航线,从而对定位精度产生一定影响。此外,利用图像匹配算法得到匹配点的位置坐标,匹配算法的性能影响匹配精度,从而直接决定定位精度。文献[16]提供了一种运动误差分析方法,本文将该方法与弹载双基前视SAR定位模型结合,分析由运动误差和匹配误差对定位精度带来的影响。
3.1 运动误差
理想情况下,任意方位ta时刻,发射雷达位于(xt,yt,zt)。由于弹载平台的高机动性产生的运动误差,发射雷达偏离了理想航线(Δxt,Δyt,Δzt),故弹载双基前视SAR斜距历程更新为
(12)
其中:
(13)
对式(12)的斜距历程分别关于Δxt、Δyt、Δzt求偏导可得由发射雷达位置偏差引起的双基斜距历程偏差,即若发射雷达偏离理想航线的差值越小,其引起的双基斜距历程的偏差越小,本文所提方法的定位精度越高。
(14)
式中:Rt 0A、Rt 0B、Rt 0C分别为合成孔径中心时刻发射雷达到匹配点A、B、C的斜距历程。
经过以上分析,由于发射雷达运动误差的存在,导致弹载双基前视SAR斜距历程出现偏差,同理运动误差也会导致角度信息出现偏差,进而影响接收雷达的定位精度。对于弹载双基前视SAR平台,收发平台位置高,运动误差产生的测角偏差对定位精度的影响,远远大于测距误差对定位精度的影响。
3.2 匹配误差
与运动误差类似,图像匹配误差也是影响定位精度的重要因素,结合文献[30]对匹配误差对定位带来的影响进行分析。匹配点在弹载双基地距SAR图像中存在x向和y向匹配误差,假设在无匹配误差的情况下匹配点位于(xA,yA,0),由于匹配误差的存在,匹配点偏离了原来位置(ΔxA,ΔyA,0)。故此时双基SAR斜距历程更新为
(15)
为了更进一步分析匹配误差对定位精度带来的影响,针对每一个匹配点,对式(15)分别关于Δx和Δy求一阶偏导可得
(16)
式中:Rr 0A、Rr 0B、Rr 0C分别为合成孔径中心时刻接收雷达到匹配点A、B、C的双基斜距历程。由式(16)可知匹配点的位置偏差,与发射雷达的运动误差相同,均会造成测距偏差,偏差越小,对定位精度的影响越小。
综上,运动误差和匹配误差最终会产生测距误差。传统基于R-D模型定位方法的定位精度同样会受运动误差的影响,从而产生测距误差、测角误差等。对于弹载双基前视SAR平台,收发平台位置高,由运动误差产生小小的测角偏差对定位精度的影响,远远大于测距误差对定位精度的影响。
4 仿真验证
通过仿真实验对本文所提定位方法进行验证,并测试其定位精度。
4.1 运动误差仿真分析
结合第3.1节弹载双基前视SAR运动误差分析,分别用文献[29]中的基于R-D模型的定位方法和本文所提解析-迭代定位方法进行仿真实验。在同样仿真参数与试验条件下,对测角误差输入量从0°增加到0.09°、测距误差输入量从0 m增加到9 m、运动误差引起的测角误差输入量从0°增加到0.09° 3种情况分别进行仿真实验,得到仿真结果如图3和图4所示。其中,Δx、Δy、Δz表示接收雷达三轴定位差。
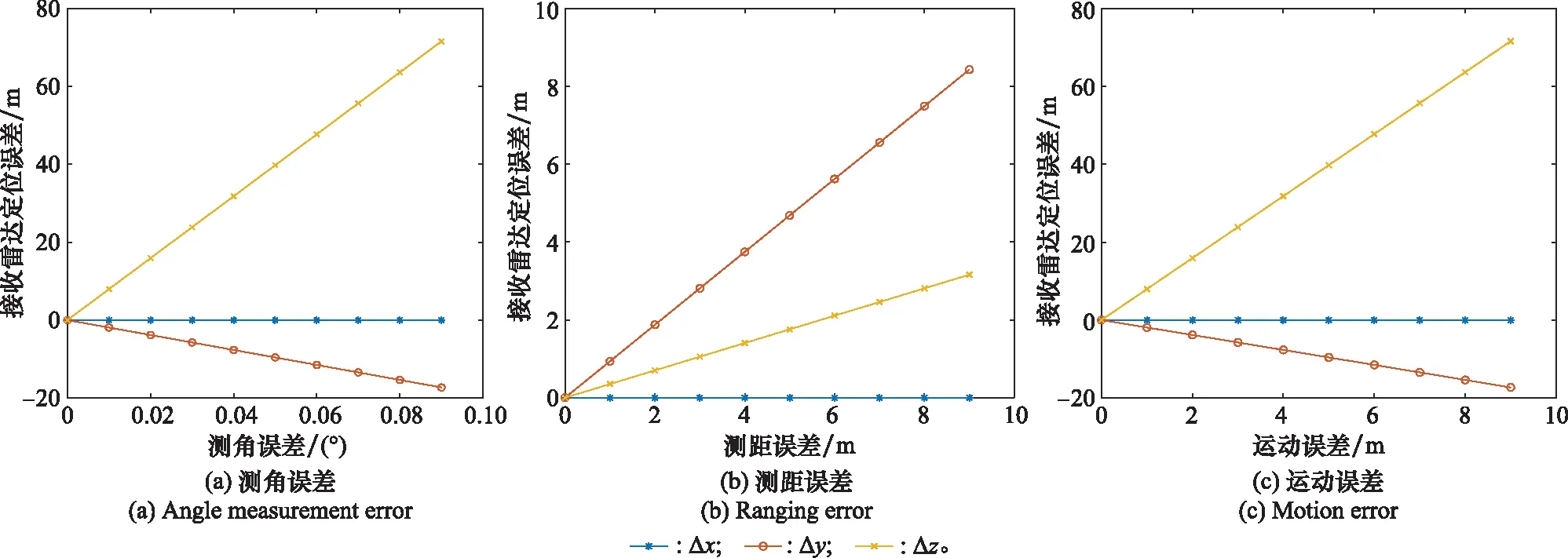
图3 运动误差对文献[29]中定位方法定位精度的影响Fig.3 Influence of motion error on the positioning accuracy of the positioning method in [29]
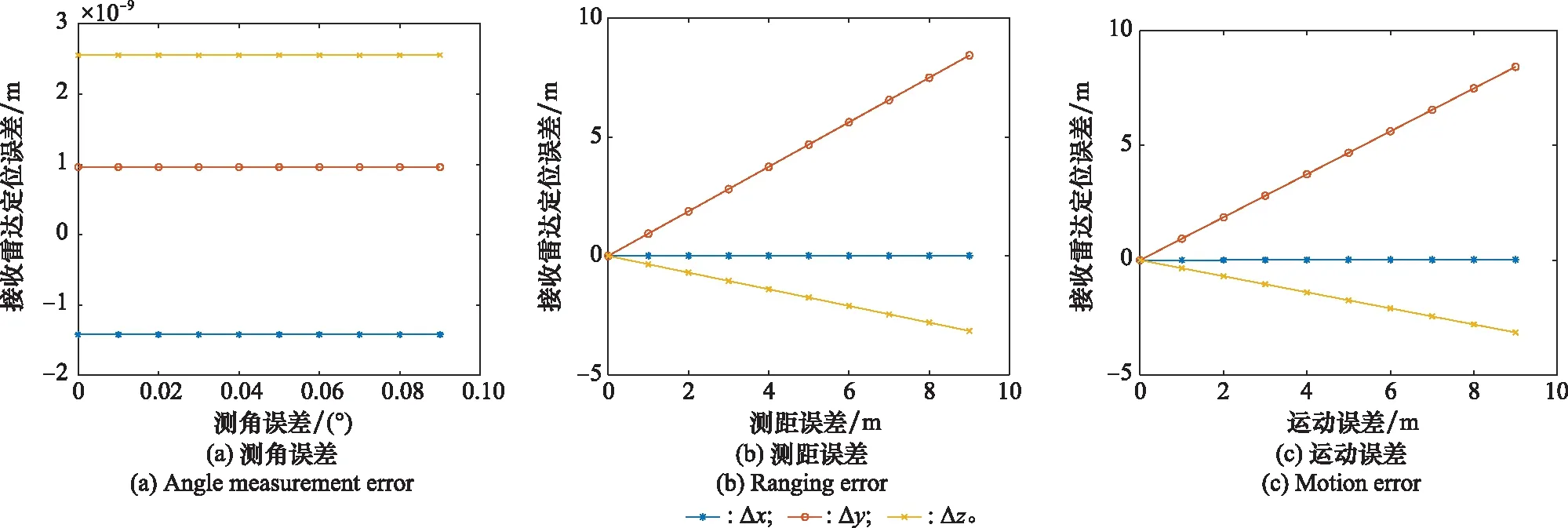
图4 运动误差对本文所提方法定位精度的影响Fig.4 Influence of motion error on the positioning accuracy of the proposed method
对比图3和图4,可以看出,测角误差对文献[29]定位方法的定位精度影响非常大,而对本文所提方法定位精度几乎没有影响;测距误差对两种方法的影响大致相同;运动误差对传统方法定位精度的影响为本文所提方法的8倍左右。综上所述,本文所提定位方法相比于文献[29]定位方法,对收发平台的运动误差具有一定的包容性。
4.2 匹配点对定位精度的影响仿真分析
为验证匹配点的选取对本文所提定位方法的影响,在发射雷达和接收雷达波束中心照射区域产生服从均匀分布的3 000组随机数,表示图像匹配算法得到的匹配点坐标。在无误差的情况下,针对随机产生的匹配点,采用本文所提解析-迭代定位方法进行1 000次仿真实验,仿真结果如图5所示。从图5中可以看出,在无误差的情况下,本文所提解析-迭代定位方法对不同匹配点均可以实现零误差定位。
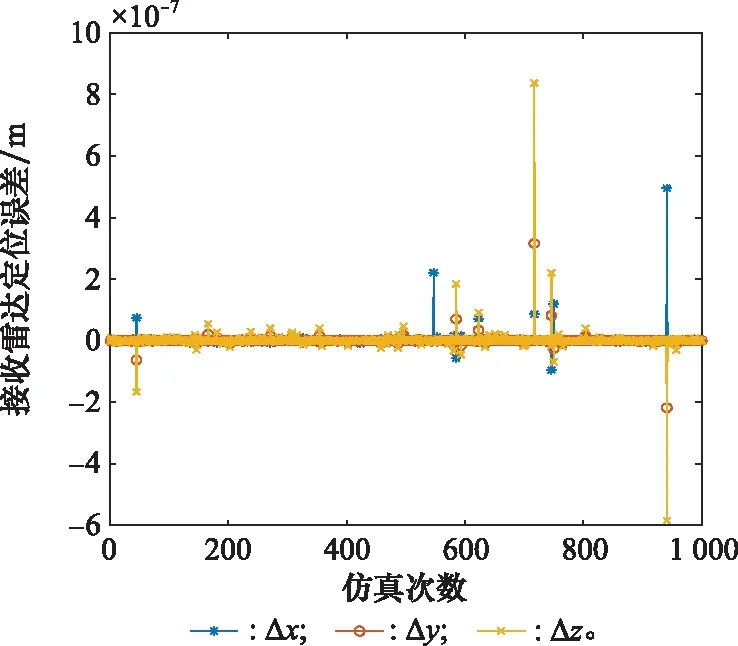
图5 解析法定位精度Fig.5 Positioning accuracy of analytical method
4.3 匹配误差仿真分析
考虑到弹载双基前视SAR成像的真实环境,在0.05°测角误差,5 m测距误差,距离向分辨率和方位向分辨率均为3 m的前提下,设置5 m匹配误差。任意选取弹载双基前视SAR轨道参数中的五个接收雷达的位置坐标,在同样实验环境和条件下,利用文献[29]中定位方法、本文所提定位模型的最优解析解和本文所提解析-迭代定位方法进行仿真实验。仿真实验结果如图6~图8所示。
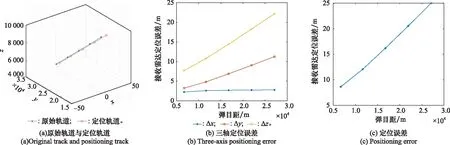
图6 文献[29]中定位方法的定位误差Fig.6 Positioning error of the positioning method in [29]
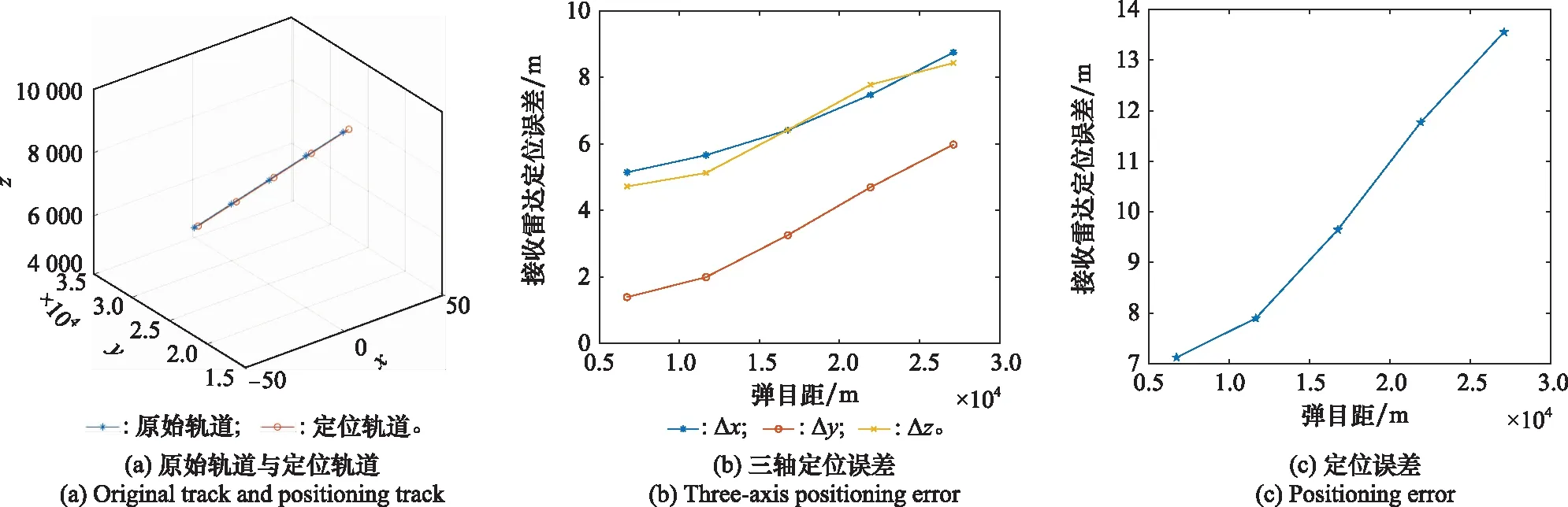
图7 解析法定位误差Fig.7 Positioning error of analytical method
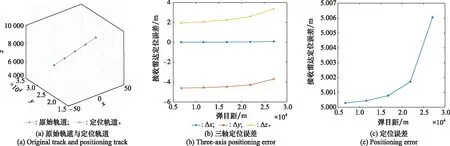
图8 解析-迭代定位误差Fig.8 Positioning error of analysis-iterative method
对比图6~图8可得到以下结论。
(1) 在存在匹配误差和运动误差的前提下,文献[29]所提定位方法和本文得到的最优解析解的定位精度受弹目距影响较大,而本文所提解析-迭代定位方法的定位精度几乎不受弹目距的影响,且定位精度远远优于文献[29]所提定位方法。
(2) 在同样实验环境和条件下,文献[29]定位方法、本文得到的最优解析解、本文所提解析-迭代定位方法的最大定位误差分别约为测距误差和匹配误差的5倍、3倍和1倍,本文所提解析-迭代定位方法的定位精度提升了5倍。
4.4 定位方法计算量仿真分析
结合本文第2.3节的分析和推导出的解析-迭代定位方法的单次浮点运算量,在第4.3节仿真的基础上,同样实验环境和条件下,采用本文所提解析-迭代定位方法和文献[26-28]所提迭代步骤求解本文所提的弹载双基前视SAR定位模型,对不同弹目距、相同运动误差、相同匹配误差的情况,进行迭代搜索次数、单次浮点运算量和运行时间的仿真实验。文献[26-28]所提迭代步骤中,迭代初始点通过服从均匀分布的随机数确定。仿真所得结果如图9所示。
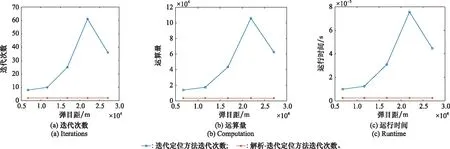
图9 定位方法计算量Fig.9 Calculation of location method
图9(a)为迭代定位方法的迭代次数,从中可以看出,采用文献[26-28]所提迭代步骤求解本文定位模型,由于该文献中并未给出初始迭代点的选取准则,本文采用服从均匀分布的随机数作为迭代搜索的初始点,所以该方法迭代次数不稳定,最大可达到61次。另外,当初始迭代点选取不准确时,该方法可能不收敛,导致定位方法失效。而本文所提解析-迭代定位方法的迭代次数稳定,两次迭代即可达到收敛。
图9(b)为迭代定位方法的单次浮点运算量,从中可以看出本文所提解析-迭代定位方法的运算量在不同弹目距下稳定,且远远小于文献[26-28]所提迭代步骤的迭代定位方法。
图9(c)为在处理器TMS320C6678,内核工作主频为1.4 GHz时,两种定位方法的运行时间。从中可以看出文献[26-28]所提迭代步骤的迭代定位方法的运行时间最大可达76 μs,而本文所提解析-迭代定位方法的运行时间均为2 ms,运行时间提升了38倍。
综合图9可知,迭代定位方法的运算量和运行时间与迭代搜索的次数成正相关。本文所提解析-迭代定位方法的运行时间远小于文献[26-28]所提迭代步骤的迭代定位方法的运行时间,可以在弹载平台上快速实现。
5 结 论
快速精准的弹体定位是弹载寻的制导阶段的重要保障,为了解决传统双基定位方法受限于速度、角度等参数精度的问题,本文建立了基于图像匹配的弹载双基前视成像定位模型,推导了定位模型的解析解集,制定了解析解的选取准则,确立了最优初始迭代点,实现了快速迭代搜索,获取了接收雷达最优三维坐标,完成了弹体的精确定位,提高了导弹在末制导阶段的作战效能。仿真实验验证了在相同实验环境和条件下,最优解析-迭代定位方法的有效性和准确性。
猜你喜欢
电力勘测设计(2022年2期)2022-03-08
中国惯性技术学报(2019年5期)2020-01-07
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
中学数学杂志(2018年15期)2018-08-08
雷达学报(2017年1期)2017-05-17
测绘通报(2017年2期)2017-03-07
艺术评鉴(2016年17期)2016-12-19
中学教学参考·理科版(2016年9期)2016-12-15