基于多信号流图和相似性度量的故障可诊断性评价方法
2023-02-11 12:29秦玉峰史贤俊
系统工程与电子技术 2023年1期
秦玉峰, 史贤俊
(海军航空大学岸防兵学院, 山东 烟台 264001)
0 引 言
故障可诊断性是系统的一种重要设计特性,主要包括故障可检测性和故障可隔离性[1]。故障具有良好的可诊断性能够更容易被诊断,因此在系统设计之初对故障可诊断性进行评价是保证系统运行质量的重要基础。
故障可诊断性评价包括可诊断性定性评价和可诊断性定量评价。其中,前者定性分析故障能否被检测或能否被隔离;后者对故障被检测或被隔离的难易程度进行量化表示[1-2]。定性评价主要是通过建立系统的定性模型,分析故障与测试之间的相关关系而后评价故障的可诊断性。文献[3]和文献[4]建立系统的多信号流图,基于多信号流图得到故障-征兆关联矩阵,结合关联矩阵给出故障可检测和可隔离准则。刘文静等基于加权有向图描述了系统的解析冗余关系,对有向图中的解析冗余结点进行分析而后给出故障可诊断性判据[5]。Liu等将符号有向图与故障时间信息相结合,提出了一种改进的基于故障时间特征矩阵的故障可诊断性评价模型[6]。定性模型从宏观的角度描述系统,因此不需要构建系统精确的数学模型,但是其评价结果是定性的,无法量化故障被检测或被隔离的难易程度。
定量评价主要基于解析模型方法以及基于数据驱动方法。在基于解析模型的方法中,Eriksson等提出了一种基于时间窗口的故障可诊断性量化评价方法[7-10]。该方法利用线性状态空间对系统进行描述,然后基于K-L散度计算不同故障模式的多元分布差异,通过衡量多元分布的差异程度实现故障可诊断性量化评价。文献[11-15]在此基础上对该方法进行了拓展。Sharifi和Langari基于方向相似度针对线性系统传感器故障可诊断性评价方法进行了研究[16-17]。对于非线性系统,李文博等提出了一种基于子空间相似度的故障可诊断性量化评价方法[18]。Lin等考虑发生多故障的情况,提出了一种基于微分几何理论的故障可诊断性评价方法[19]。解析模型将系统用数学方程进行表示,物理意义明确。但是对于部分系统,其结构组成和工作过程都比较复杂,因此建立其精确完备的数学模型是不可能的。
数据驱动方法基于测试数据对故障可诊断性进行评价。Hua等采用广义模糊数来描述测试变量的信息,利用不同故障下模糊数的差值来反映故障可诊断性[20]。Fu等假设系统噪声分布未知,提出了一种基于马氏距离的故障可诊断性评价方法[21]。数据驱动方法虽然不需要建立系统精确的数学模型,但是该方法无法反映故障的传播过程,不能充分体现系统特性。
综上所述,若单独使用任一种方法对故障可诊断性进行评价,其应用范围都会受到一定限制。由于电子系统应用广泛,故障数占比相对较高,因此考虑到上述方法的优点与不足,本文将定性模型与数据驱动方法相结合,针对电子系统的故障可诊断性评价问题,提出了一种基于多信号流图和相似性度量的故障可诊断性评价方法。
1 基于多信号流图的故障可诊断性评价准则
多信号流图模型有两种表示形式:一种是图示模型,其特点是直观,便于理解;另一种是故障-测试相关性矩阵,其特点是便于计算和处理。这两种形式本质相同,可以互相转化。
1.1 图示模型
多信号流图的图示模型在结构上可以用一个有向图来表示[22-23],该有向图能够反映系统的以下信息:
(1) 模块集合M={m1,m2,…,ml},这里的模块根据建模层次的不同,可以指故障模式、元件、部件、维修车间更换(Shop Replaceable Unit, SRU)单元、外场可更换(Line Replaceable Unit, LRU)单元或者子系统等;
(2) 测试点集合TP={tp1,tp2,…,tpx};
(3) 有向边集合E={eij},有向图中的模块和测试点都以节点进行表示,有向边连接各个节点,表示系统的物理连接和故障影响的传播方向,eij表示由节点i指向节点j;
(4) 信号集合S={s1,s2,…,sy},这里的信号是指能够反映故障的征兆、属性以及参量;
(5) 每个模块mi所影响的信号集合为S(mi),S(mi)⊆S;
(6) 测试集合T={t1,t2,…,tn},每个测试仅对1个信号进行检测;
(7) 每个测试点tpi所包含的一组测试集合为T(tpi),T(tpi)⊆T。
多信号流图的图示模型将故障作为固有属性集成在单元模块中,其形式与系统的原理图类似。图示模型不仅能够反映系统的功能结构,还可以描述系统的故障可诊断性信息:测试点描述进行测试的位置,故障以信号的形式在系统中进行传播,并且与能够检测该信号的测试相关联。图示模型具有系统结构清晰,能够描述故障传播过程,模型信息丰富等优点,可以利用简明直观的图示形式描述复杂系统,便于开展系统故障可诊断性设计工作。
1.2 故障-测试相关性矩阵
在多信号流图中,故障和与之相关联的测试之间存在因果作用关系。若测试tj所检测的信号在故障fi发生后与正常情况相比存在异常,则可以通过tj检测fi的发生;反之,tj无法检测fi是否发生。这说明fi与tj之间的关系是可以相互推导的,这种关系可以用故障-测试相关性矩阵D来描述:
(1)
式中:若fi所在模块ma至少有一条路径能够到达测试tj并且满足S(ma)∩S(tj)≠∅,则称故障fi与测试tj是相关的,且ftij=1;否则,称故障fi与测试tj是无关的,且ftij=0。
1.3 故障可诊断性评价准则
根据故障-测试相关性矩阵D提出如下故障可诊断性评价准则:
(1) 可检测性评价准则
若矩阵D的第i行至少有一个元素为1,即至少存在一个测试能够检测故障fi,则称故障fi是可检测的;若第i行所有元素全部为0,即所有测试都无法检测故障fi,则称故障fi是不可检测的。
(2) 可隔离性评价准则
1) 若故障fi是不可检测的,则故障fi与其他任何故障都不能隔离。
2) 若故障fi和fj都是可检测的,则存在以下两种情况:① 当矩阵D的第i行和第j行所对应位置的元素不完全相同时,fi和fj一定可以通过不同的测试进行区分,此时故障fi和故障fj是可隔离的[4];② 当矩阵D的第i行和第j行中的对应位置元素完全相同时,与fi和fj相关的测试完全一致。此时若根据传统定性方法进行分析,则认为fi和fj是不可隔离的。
本文考虑测试的实际物理意义:若发生故障fi时的测试信号与发生故障fj时的测试信号完全相同,则fi和fj是不可隔离的;若发生故障fi时的测试信号与发生故障fj时的测试信号不完全相同,则fi和fj是可隔离的。
2 基于相似性度量的故障可诊断性定量评价方法
从理论上讲,若测试tj能够检测故障fi,那么在故障fi发生时,测试tj所得到的测试信号sfi与未发生故障时测试tj所得到的测试信号sNF一定有所不同。因此,可以用测试信号之间的相似度表示检测故障的难度:若sfi与sNF的相似度较低,则检测故障fi的难度较小;反之,检测故障fi的难度较大。同理,隔离故障的难度也可以用测试信号的相似度来表示:若sfi与sfj的相似度较低,则隔离故障fi与fj的难度较小;反之,隔离故障fi与fj的难度较大。
基于以上分析,本节提出了基于相似性度量的故障可诊断性定量评价方法,将故障可诊断性定量评价问题转化为测试信号特征向量的相似性度量问题。首先基于小波包分解将测试信号分解为不同的子频段,根据小波包Shannon熵构建测试信号的特征向量;然后计算特征向量之间的欧氏距离,衡量各测试信号的相似度;最后基于测试信号的相似度大小实现故障可诊断性定量评价。
2.1 基于小波包Shannon熵的特征提取
小波包变换已经在故障诊断领域取得了广泛应用[24-27]。基于小波包熵的特征提取方法将小波包变换良好的时频特性与信息熵理论相结合,实现信号特征的准确提取。选用db6小波作为小波基函数,对测试信号s进行3层小波包分解,如图1所示[28]。
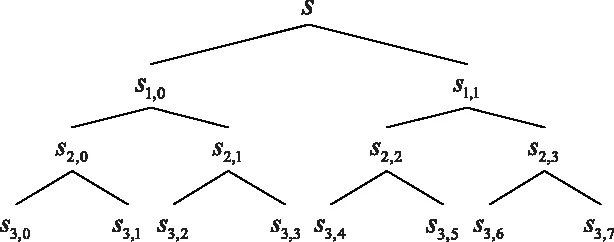
图1 3层小波包分解示意图Fig.1 Schematic diagram of three-layer wavelet packet decomposition
图1中:si, j为节点,i=1,2,3为层数,j=0,1,…,7为节点所在位置。测试信号s在第3层被均等分为8个节点:
(2)
设测试信号s长度为N,则第3层节点s3, j的长度为N/8,节点s3, j的Shannon熵[29-30]为
(3)
此时可以构造测试信号s的特征向量:
ξs=[E(s3,0),E(s3,1),…,E(s3,7)]T
(4)
2.2 基于欧氏距离的故障可诊断性定量评价
欧氏距离衡量多维空间中两个点之间的绝对距离,是最常见的距离度量方法。对于欧氏空间中的两点x=[x1,x2,…,xn]T和y=[y1,y2,…,yn]T,x和y之间的欧氏距离计算公式为
(5)
前文中已经通过小波包分解构造了测试信号的特征向量。因此,可以通过计算不同故障模式下测试信号特征向量的欧氏距离来量化故障的可诊断性。
(1) 故障可检测性定量评价方法
首先,对特征向量进行归一化处理:
(6)
(7)

(8)

实际上,与故障f相关的测试个数越多,在对故障f进行故障诊断时所能用的信息也越多,即增加系统中与故障f相关的测试个数能够提高故障f的可诊断性。因此,故障f的可检测性指标可以用如下公式计算:
(9)
式中:ti(i=1,2,…,α)为与故障f相关的测试,可以由故障-测试相关性矩阵D得到;df取值越小,表示故障f越容易被检测。
(2) 故障可隔离性定量评价方法
若故障fi和故障fj是可检测的,则存在以下两种情况:

(10)
2) 若故障fi与测试tk无关而故障fj与测试tk相关。考虑到两个单位向量之间的欧式距离最大值为2,因此记dtk=2,使得在隔离故障fi与fj时,测试tk的相似性最小。
故障fi与fj的可隔离性指标可以用如下公式计算:
(11)
式中:tk(k=1,2,…,β)为与故障fi或fj相关的所有测试;dfi,fj取值越低,表示故障fi与fj越容易被隔离。
2.3 基于故障可诊断性评价矩阵的可诊断性指标设计
构建故障可诊断性评价矩阵Δ:
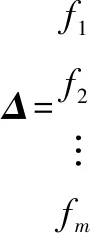
(12)
式中:dfi,fj=dfj,fi;NF表示无故障发生的情况;对于任一故障,不存在与其自身的可隔离性,用*表示;根据故障可诊断性评价准则,若故障fi是不可检测的,则矩阵Δ的第i行元素全部用*表示;若故障fi是可检测的,则矩阵Δ内的元素根据前文所提方法进行计算。
根据故障可诊断性评价矩阵Δ定义如下系统可诊断性指标:
(1) 检测难度γFD
检测难度定义为:检测出系统中所有可检测故障的难易程度,其计算公式为
(13)
(2) 隔离难度γFI
隔离难度定义为:隔离系统中所有可隔离故障的难易程度,其计算公式为
(14)
可诊断性指标数值越小,说明系统可诊断性水平越好。由上述指标能够确定系统可诊断性水平,可以根据这些指标对系统进行可诊断性优化设计。
3 仿真分析
3.1 仿真实验1
以图2所示滤波放大电路为例,对本文所提方法进行验证[31]。
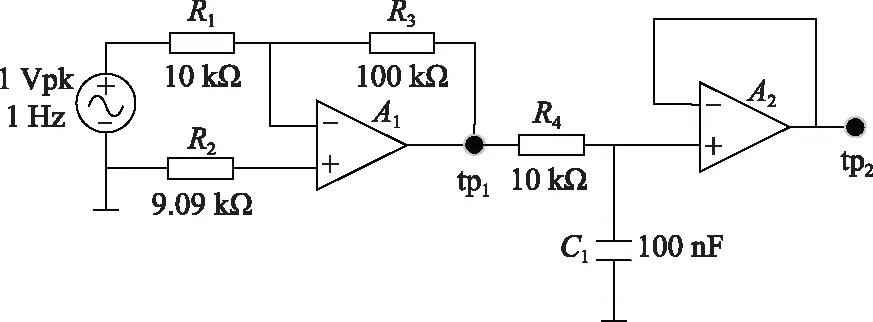
图2 滤波放大电路原理图Fig.2 Schematic diagram of the principle of filter amplification circuit
该系统包括电阻R1、R2、R3、R4,电容C1,运放A1、A2,所有元件的容差为5%,选取测试信号为电压信号s。输入信号为峰值1 V、频率1 kHz的电压信号。通过分析电路原理发现,电阻R2短路不影响系统正常工作状态,因此在实验中不考虑电阻R2短路的情况。系统组成元件的故障模式如表1所示。

表1 滤波放大电路元件故障模式表
(1) 多信号流图建立
假设为系统设置两个测试点,其中:tp1设置在运放A1的输出端,tp2设置在运放A2的输出端。测试点tp1中包含电压信号测试t1,测试点tp2中包含电压信号测试t2。根据滤波放大电路的电路原理,建立其多信号流图图示模型如图3所示。
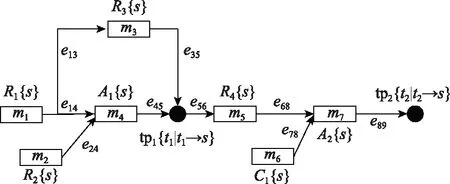
图3 滤波放大电路的多信号流图Fig.3 Multi-signal flow chart of filter amplification circuit
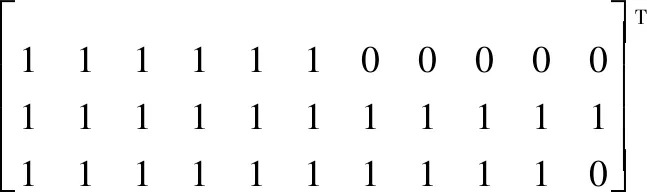
其中:R1,R2,R3,A1分别用m1~m4表示,令R1,R2,R3,A1和tp1分别为节点1~节点5;R4,C1,A2分别用m5~m7表示,令R4、C1,A2和tp2分别为节点6~节点9。f1~f6所在模块m1~m4都至少有一条路径能够到达测试t1和t2,且满足S(Ma)∩S(Tb)≠∅,Ma={m1,m2,m3,m4},Tb={t1,t2}。因此,ftij=1(i=1,2,…,6,j=1,2)。f7~f11所在模块m5~m7都至少有一条路径能够到达测试t2且满足S(Mb)∩S(t2)≠∅,Mb={m5,m6,m7},同时没有路径能够到达测试t1,因此,fti1=0,fti2=1(i=7,8,…,11)。根据以上分析,可以得到系统的故障-测试相关性矩阵D为
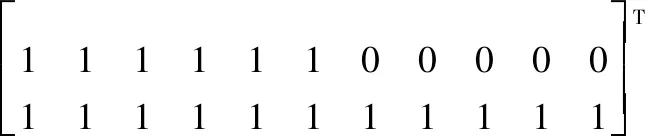
根据故障-测试相关性矩阵D可知,矩阵中没有全零行,故所有的故障模式都是可检测的。
(2) 可诊断性定量分析
1) 设仿真时间为20 ms,对故障f1和f8的可诊断性进行定量分析。当系统无故障发生时,测试t1、t2输出的测试信号如图4所示。
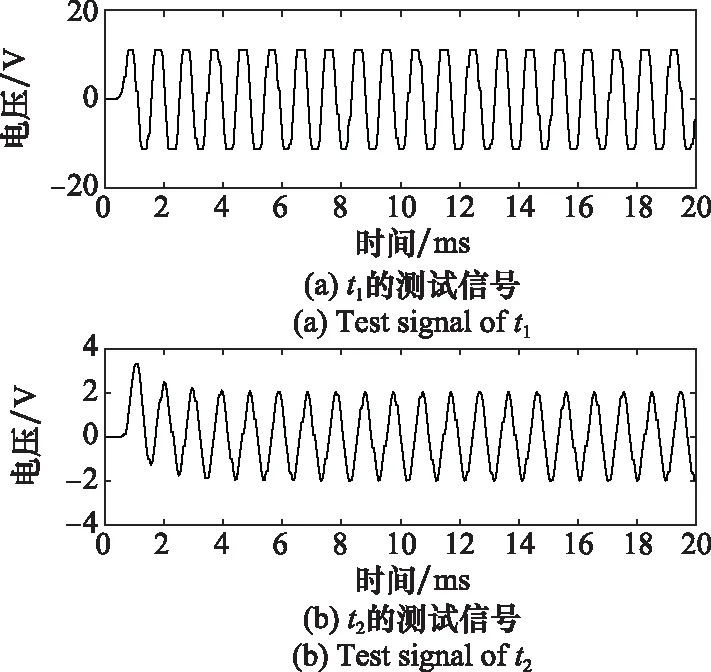
图4 滤波放大电路无故障发生时的测试信号Fig.4 Test signals of filter amplification circuit when no fault occurs
根据前文分析,构建测试信号的特征向量:
故障f1与测试t1,t2都相关。当发生故障f1时,测试t1,t2的测试信号如图5所示。
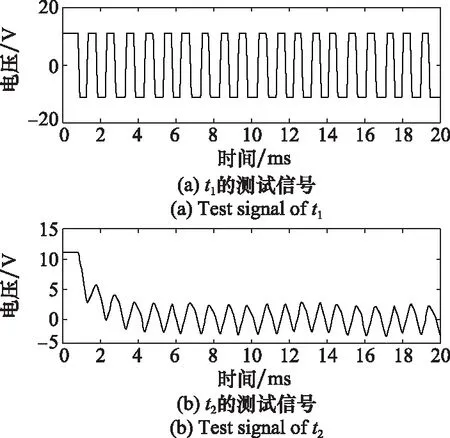
图5 滤波放大电路发生故障f1时的测试信号Fig.5 Test signals of filter amplification circuit when fault f1 occurs
构建测试信号的特征向量:
根据公式计算得到测试t1及测试t2的相似度分别为
根据公式计算故障f1的可检测性指标:
故障f8仅与测试t2相关,当发生故障f8时测试t2的测试信号如图6所示。
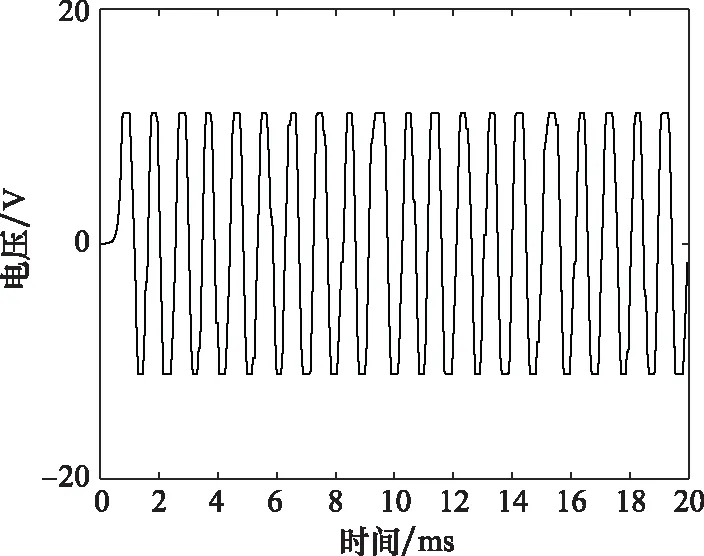
图6 滤波放大电路发生故障f8时的测试信号Fig.6 Test signal of filter amplification circuit when fault f8 occurs
构建测试信号的特征向量:
根据公式计算得到测试t2的相似度:
根据公式计算故障f8的可检测性指标:
df8=exp(-dt2)=0.868 5
当系统分别发生故障f1与f8时,由于故障f1与测试t1相关而故障f8与测试t1无关,因此测试t1的相似度为dt1=2。根据公式计算得到测试t2的相似度:
由公式可知,故障f1与f8的可隔离性指标为
2) 设仿真时间为20 ms,对故障f6和f11的可诊断性进行分析。故障f6与测试t1,t2都相关,当发生故障f6时测试t1,t2的测试信号如图7所示。

图7 滤波放大电路发生故障f6时的测试信号Fig.7 Test signals of filter amplification circuit when fault f6 occurs
构建测试信号的特征向量:
根据公式计算得到测试t1及测试t2的相似度分别为
根据公式计算故障f6的可检测性指标:
故障f11仅与测试t2相关,当发生故障f11时测试t2的测试信号如图8所示。
图8 滤波放大电路发生故障f11时的测试信号Fig.8 Test signal of filter amplification circuit when fault f11 occurs
构建测试信号的特征向量:
根据公式计算得到测试t2的相似度:
根据公式计算故障f11的可检测性指标:
df11=exp(-dt2)=0.367 9
当系统分别发生故障f6与f11时,根据之前分析,此时测试t1的相似度为dt1=2。根据公式计算得到测试t2的相似度:
由公式可知,故障f6与f11的可隔离性指标为
类似地,可以计算其余故障的可诊断性,此处直接给出系统的故障可诊断性量化评价矩阵Δ:
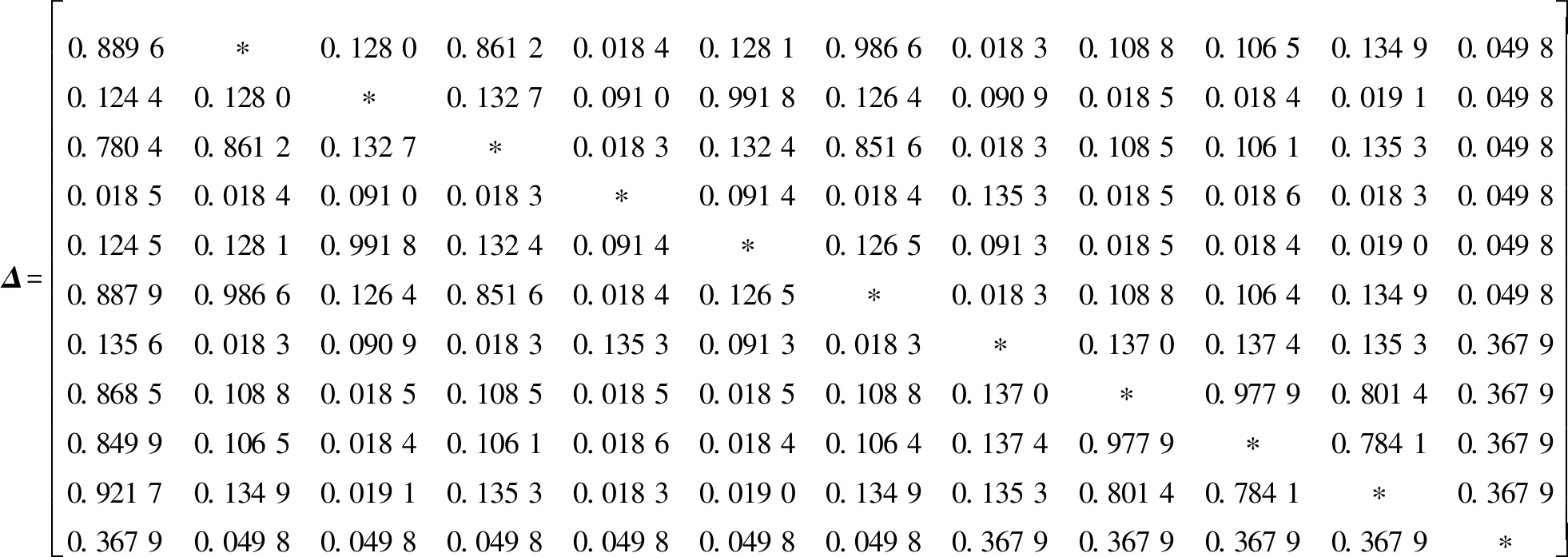
根据故障可诊断性量化评价矩阵Δ计算得到系统可诊断性指标分别为:γFD=5.968 9,γFI=11.036 2。若在运放A2正极输入端增设测试点tp3:tp3{t3|t3→s},则增设测试后的故障-测试相关性矩阵D为
此时系统故障可诊断性量化评价矩阵为
计算得到增设测试后的系统可诊断性指标分别为:γFD=5.143 8,γFI=7.597 8。根据以上计算结果可知:① 本文所提方法能够得到故障可诊断性定量评价结果,不仅能够说明故障是否能够被诊断,还能反映诊断故障的难易程度;② 在增加测试t3后,由于测试t3与故障f11不相关,因此故障f11的可检测性没有发生变化;测试t3与故障f1~f10相关,在对故障f1~f10进行故障诊断时,相比于仅有测试t1和测试t2,测试t3给故障诊断算法提供了额外的测试信息,提高了故障f1~f10的故障可诊断性,因此故障f1~f10的可检测性指标以及所有的故障可隔离性指标都有所降低;③ 故障可诊断性与测试点位置的选取和测试数量有关,不同位置和数量的测试对故障的可诊断性影响也不同。
3.2 仿真实验2
由于开关电源是各种系统的核心部分,因此利用本文方法对开关电源的故障可诊断性进行定量评价。开关电源的电路原理图如图9所示,其中输入信号为220 V,150 Hz的电压信号。受限于文章篇幅,选取部分关键元件的故障模式进行分析,如表2所示。
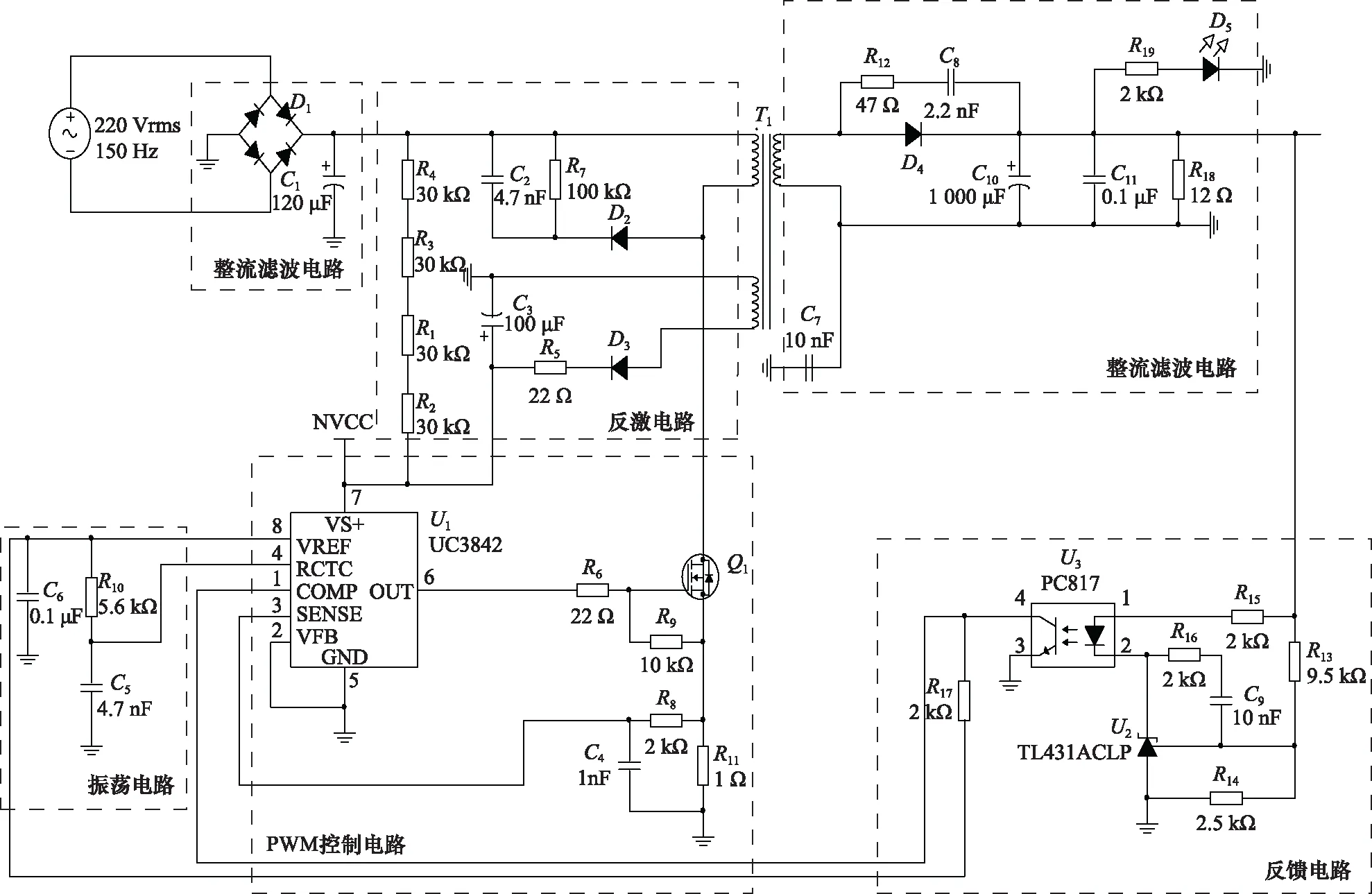
图9 开关电源电路原理图Fig.9 Schematic diagram of the principle of switching power circuit

表2 开关电源中部分元件故障模式表
(1) 多信号流图建立
选取测试信号电压信号s1和电流信号s2,假设为系统设置4个测试点,其中:测试点tp1、tp4中分别包含电流信号测试t1、t4,测试点tp2、tp3中分别包含电压信号测试t2、t3。根据开关电源电路原理图,建立其多信号流图图示模型如图10所示,图中省略了有向边的序号并且所选取元件的布局位置和测试点的设置位置在图中用虚线框进行标识,其中:R18,R11,C10,R10,Q1,U3分别用m1~m6进行表示。f4所在模块m4至少有一条路径能够到达测试t1~t4,且满足S(m4)∩S(Ta)≠∅,Ta={t1,t2,t3,t4}。其余故障所在模块m1~m3,m5~m6都至少有一条路径能够到达测试t1~t3且满足S(Ma)∩S(Tb)≠∅,Ma={m1,m2,m3,m5,m6},Tb={t1,t2,t3},同时没有路径能够到达测试t4,因此ftij=ft44=1(i=1,2,…,6,j=1,2,3)。根据以上分析,可以得到系统的故障-测试相关性矩阵D为
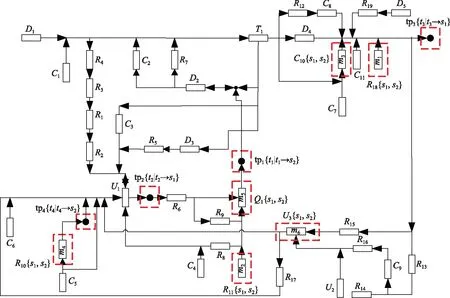
图10 开关电源的多信号流图Fig.10 Multi-signal flow chart of switching power
(2) 可诊断性定量分析
设仿真时间为1 ms,对故障f1和f2的可诊断性进行定量分析。当系统无故障发生时,测试t1~t4的测试信号如图11所示。构建测试信号的特征向量:
故障f1与测试t1~t3相关,当发生故障f1时测试t1~t4的测试信号如图12所示。
构建测试信号的特征向量:
根据公式计算得到测试相似度分别为
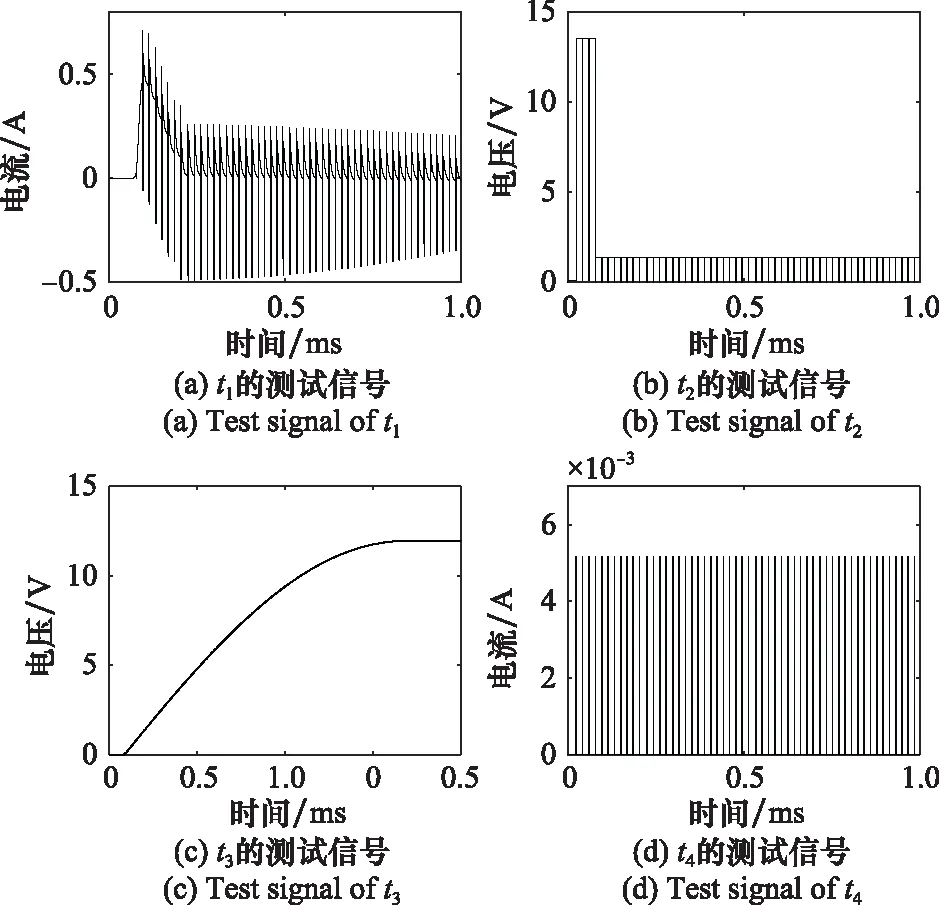
图11 开关电源无故障发生时的测试信号Fig.11 Test signals of switching power when no fault occurs
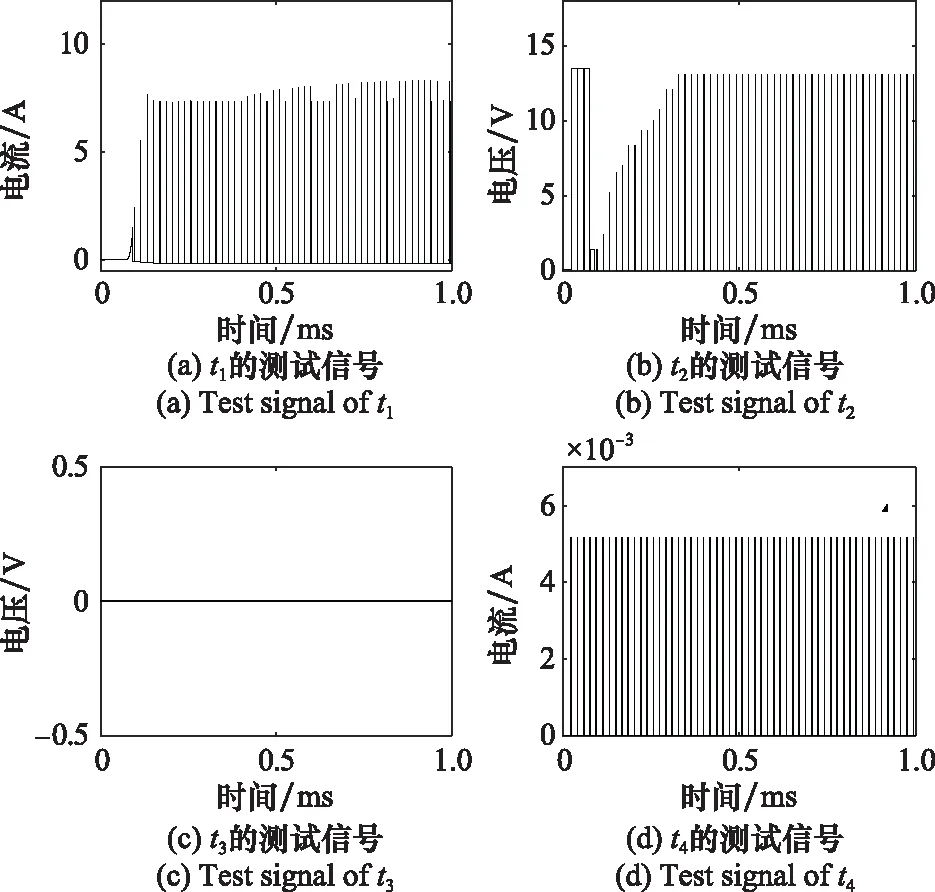
图12 开关电源发生故障f1时的测试信号Fig.12 Test signals of switching power when fault f1 occurs
根据公式计算故障f1的可检测性指标:
故障f2与测试t1~t3相关,当发生故障f2时测试t1~t4的测试信号如图13所示。

图13 开关电源发生故障f2时的测试信号Fig.13 Test signals of switching power when fault f2 occurs
构建测试信号的特征向量:
根据公式计算得到测试相似度分别为
根据公式计算故障f2的可检测性指标:
当系统分别发生故障f1与f2时,根据公式计算得到测试相似度分别为
由公式可知,故障f1与f2的可隔离性指标为
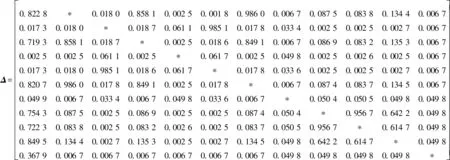
同理可以计算得到其余故障的可诊断性指标,开关电源系统的可诊断性量化评价矩阵为
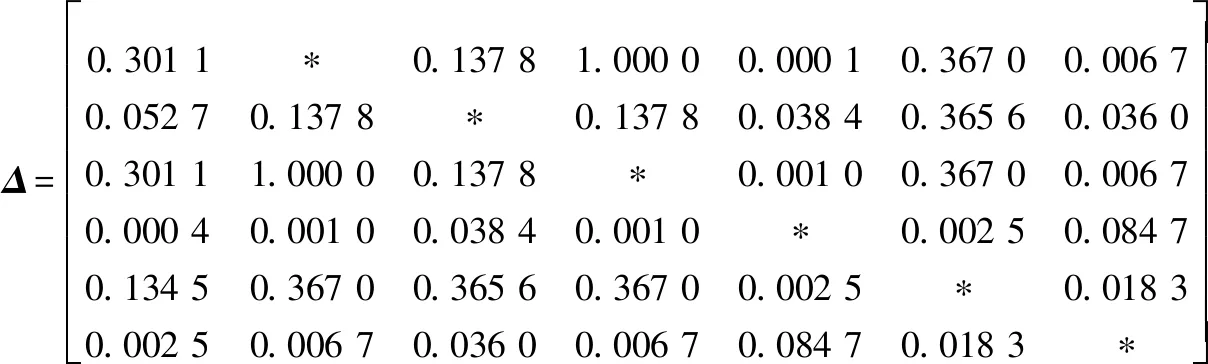
根据故障可诊断性量化评价矩阵Δ计算得到开关电源系统的可诊断性指标分别为:γFD=0.792 3,γFI=2.570 5。由实验结果可得,若仅利用传统定性模型进行故障可诊断性评价,那么只能给出故障可诊断性的定性评价结果,并且认为故障f1,f2,f3,f5,f6之间都是不可隔离的。但实际上不同故障所引起测试信号的变化不一定相同,在此基础上可以对故障可诊断性进行深入分析。本文所提方法通过计算测试信号特征向量之间的距离来衡量诊断故障的难易程度,能够对故障可诊断性进行定量评价。另外,可以看出故障f1与f3的可检测性指标相同,可隔离性指标为1,说明开关电源在发生故障f1时的测试信号与发生故障f3时的测试信号完全相同,f1与f3是不可隔离的,根据前文分析,可以考虑增设测试,使得故障f1,f3能够被隔离。
值得注意的是,系统可诊断性指标除了与故障本身的可诊断性指标相关以外,还与系统可诊断故障的个数有关。因此,可以将故障检测率、故障隔离率等性能指标以及测试个数作为约束条件,将系统可诊断性指标作为优化对象,对系统进行优化设计,从根本上提高系统故障诊断能力。
4 结 论
本文将定性模型与数据驱动方法相结合,提出了一种基于多信号流图和相似性度量的故障可诊断性评价方法。相比于现有方法,本文所提方法不需要构建系统精确的数学模型,同时能够对故障可诊断性进行定量评价,为电子系统故障可诊断性评价的相关研究提供了一种新的思路。进行故障可诊断性评价的根本目的是提高系统的可诊断性水平,可诊断性设计是后续的主要研究方向。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
保定学院学报(2022年2期)2022-04-07
幽默大师(2020年11期)2020-11-26
数学大世界(2019年7期)2019-05-28
摄影之友(影像视觉)(2019年3期)2019-03-30
摄影之友(影像视觉)(2019年2期)2019-03-05
摄影之友(影像视觉)(2018年12期)2019-01-28
中华建设(2017年1期)2017-06-07
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
南都周刊(2015年4期)2015-09-10