
多源光测信息融合跟踪方法及应用
2023-02-13 03:46李桂芝
电光与控制 2023年1期
李 霁, 李桂芝
(中国人民解放军92941部队,辽宁 葫芦岛 125000)
0 引言
光电经纬仪是靶场武器鉴定与故障分析的重要测量设备,为靶场提供了目标的精确弹道数据与实况影像[1],其稳定跟踪目标过程是试验中最关键、最核心,也是最没有把握的环节。如何快速有效地利用多种信息数据对高速运动目标稳定跟踪不丢失,一直是难以破解的技术难点问题[2]。研究发现,目前比较流行的多传感器信息数据融合技术适用于解决这一问题,通过多种信息或数据的关联和组合,从而提高目标位置的估计精度,完成对试验态势的实时评估,减小跟踪过程中的误差,达到改善结果的目的[3]。
在信息数据融合方面有很多学者进行了大量的研究,并提出许多成熟且高效的方法,例如卡尔曼滤波、多贝叶斯估计、加权平均等随机类的算法;规模逻辑理论、神经网络、专家系统等人工智能类方法[4]。实践证明单一的跟踪方法和数据处理算法难以适用于靶场不同类型任务需求,通过总结研究靶场近年任务需求,提出多源光测信息融合跟踪方法,以期实现不同目标、不同背景下目标的自主稳定跟踪[5]。
1 多源光测融合跟踪
1.1 多源光测融合跟踪方法
多源光测信息是指光电经纬仪在跟踪目标运动过程中实时测量的本机或目标数据,以及在任务开始前输入的先验信息,具体包括:图像目标脱靶量、编码器位置、外部引导数据、理论弹道数据以及单杆修正数据等[6]。信息融合跟踪则是对多源信息有效地融合处理,输出设备坐标系下目标运动状态(位置、速度等)的准确估计值,并引导跟踪架对目标进行融合跟踪,提高多源光测信息融合跟踪的能力[7],其实现途径如图1所示。

图1 融合跟踪实现途径Fig.1 Implementation of fusion tracking
1.2 多源光测融合跟踪数据处理算法
多源光测融合跟踪数据处理算法主要分解为4个数据处理过程,即本机测量数据处理、实时外引导数据处理、预设理论弹道数据处理以及加权融合数据处理。
1.2.1 本机测量数据处理
本机测量数据处理可进一步细分成数据时空对齐及综合、数据关联、状态估计3个过程。
数据时空对齐及综合是将不同步的目标脱靶量和编码器数据对齐至同一时刻进行合成,得到该时刻目标指向位置[8]。实际中,目标脱靶量的采样频率要远低于编码器的采样频率,并且具有数据延迟[9]。为了使两者在时间上对齐,先缓存一段编码器数据,之后根据目标脱靶量采集时刻和数据延迟时间τ计算采样时刻k,再从缓存的编码器数据中抽取k时刻前后两帧采样数据xk-τ1,xk-τ2并进行线性插值得到k时刻编码器值xk,如图2所示。

图2 编码器和脱靶量时间对齐Fig.2 Time alignment of encoder and miss distance
线性插值公式为
(1)
zk=xk+byk
(2)
目标脱靶量和编码器时间对齐后,进一步空间坐标对齐得到目标指向位置zk。式中:b为目标脱靶量量纲;yk为k时刻目标脱靶量。
数据关联是根据目标运动特征建立目标和测量数据之间的对应关系[10]。对于单目标跟踪,目标和测量数据间的对应关系自然成立,数据关联步骤只要进行关联门判决即可,落在关联门内即认为目标测量数据有效[11]。一般采用矩形门关联准则,即
(3)


1)匀加速模型为
xk=F1xk-1+w1
(4)
(5)

(6)
(7)
其中,T为采样周期。
2)机动加速度模型为

(8)
(9)

(10)
(11)
3) 测量方程表示为
zk=H×xk+v
(12)
R=cov(v)=r2
(13)
其中:H为测量方程,且H=[1,0,0];R为测量噪声协方差表达式;v为测量噪声;r2为设定的测量噪声方差。
采用上述两种模型交互组合得到目标状态综合估计值为
(14)
(15)

1.2.2 实时外引导数据处理
外引导数据处理,一般采用中心机实时引导值,该引导值来自多种测控设备组合测量结果,引导数据的正确性高,几乎不会出现错误目标的引导数据。但对于光电经纬仪而言,外引导数据噪声较大,存在数据延时。因此,对外引导数据处理细分为跳点剔除、滤波、预测插值3个过程。
跳点剔除就是去掉误差明显偏大的引导数据。误差偏大的引导数据给滤波带来不利的影响,必须剔除。跳点剔除方法类似上述矩形关联门准则,即
(16)

实际中,因中心机实时引导值计算数据源不同,引导数据标准差σ也会发生变化。可以通过统计近时间段引导误差均方根得到标准差估计值σ,即
(17)

1.2.3 预设理论弹道数据处理
目标在运动过程中,受各种扰动的影响,理论弹道轨迹与目标实际轨迹存在偏差。实践经验表明,目标中段飞行时理论弹道误差较大,但处于目标安全飞行误差允许范围内,并且误差变化缓慢。因此,如果能够计算理论弹道误差量并对其位置修正,那么短时间内修正后目标理论弹道接近于实际轨迹,在一定程度上可辅助目标跟踪。对理论弹道数据处理细分成位置修正和数据插值两个过程。

(18)

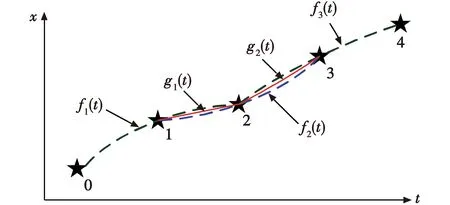
图3 理论弹道数据插值原理Fig.3 Principle of theoretical data interpolation
对每个弹道点,取其2个相邻弹道点共3个点用二次抛物曲线拟合,由此得到一系列抛物线f1(t),f2(t),f3(t),…。其中,1~2段由f1(t)和f2(t)两组抛物线描述,2~3段由f2(t)和f3(t)两组抛物线描述,依次类推。为了得到更平稳的插值数据,点间轨迹用两组抛物线组合描述,即点1至点2段轨迹为g1(t)=[f1(t)+f2(t)]/2;点2至点3段轨迹为g2(t)=[f2(t)+f3(t)]/2。依次类推,完成直角坐标系下理论弹道数据插值。
1.2.4 加权融合数据处理
多源信息加权融合数据处理是融合跟踪模式中最重要的数据处理环节,融合流程如图4所示。
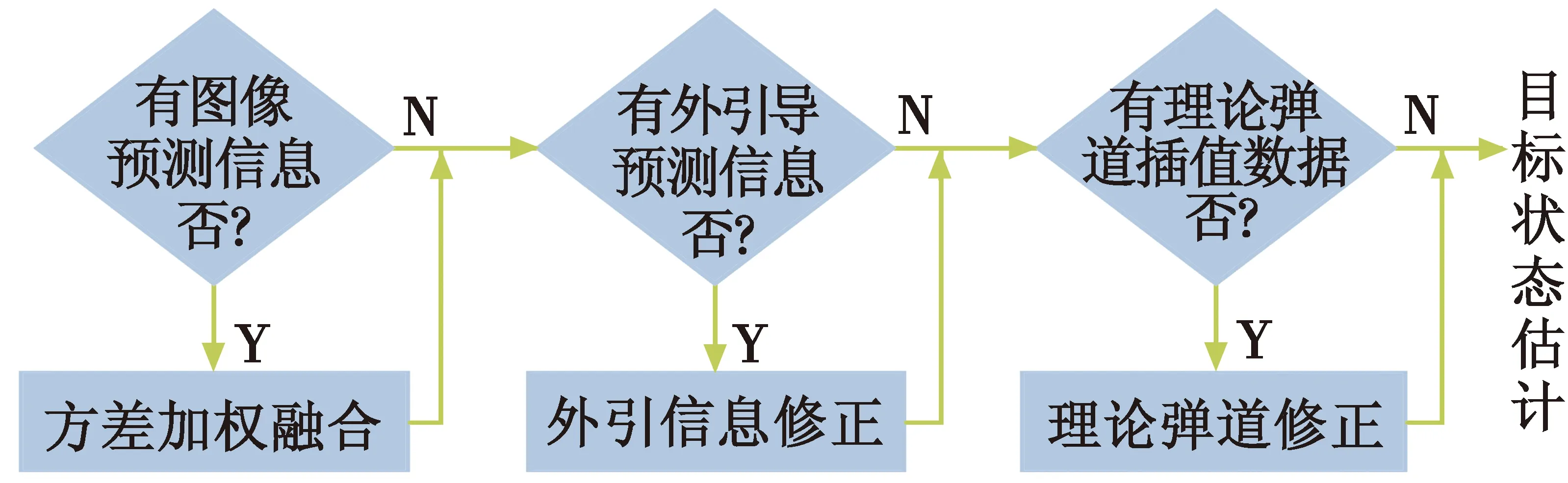
图4 加权融合流程框图Fig.4 Flow chart of weighted fusion
根据各路信息是否参与融合过程,以及各路信息处理结果的可靠性,依次进行图像数据的加权融合,对外引导预测值的修正以及对理论弹道的修正,并依次与图像融合状态信息进行平滑滤波,滤波参数由先验参数与预测误差方差共同决定,最终的结果作为融合数据处理结果发送给伺服控制卡,完成设备的闭环跟踪控制[14]。

(19)

2 融合跟踪仿真与估计误差分析
多源光测信息融合跟踪过程中,目标状态估计存在估计误差,该误差直接影响目标跟踪精度[15]。为了分析目标运动状态估计误差,首先必须得到可用来进行对比分析的目标运动轨迹真值数据。通过Matlab仿真手段产生一组实验用的模拟轨迹数据,如图5所示,对应的方位角位置、角速度和角加速度轨迹如图6所示。实际经验表明,这种仿真得到的数据足以验证跟踪算法问题。

图5 直角坐标系下目标运动轨迹
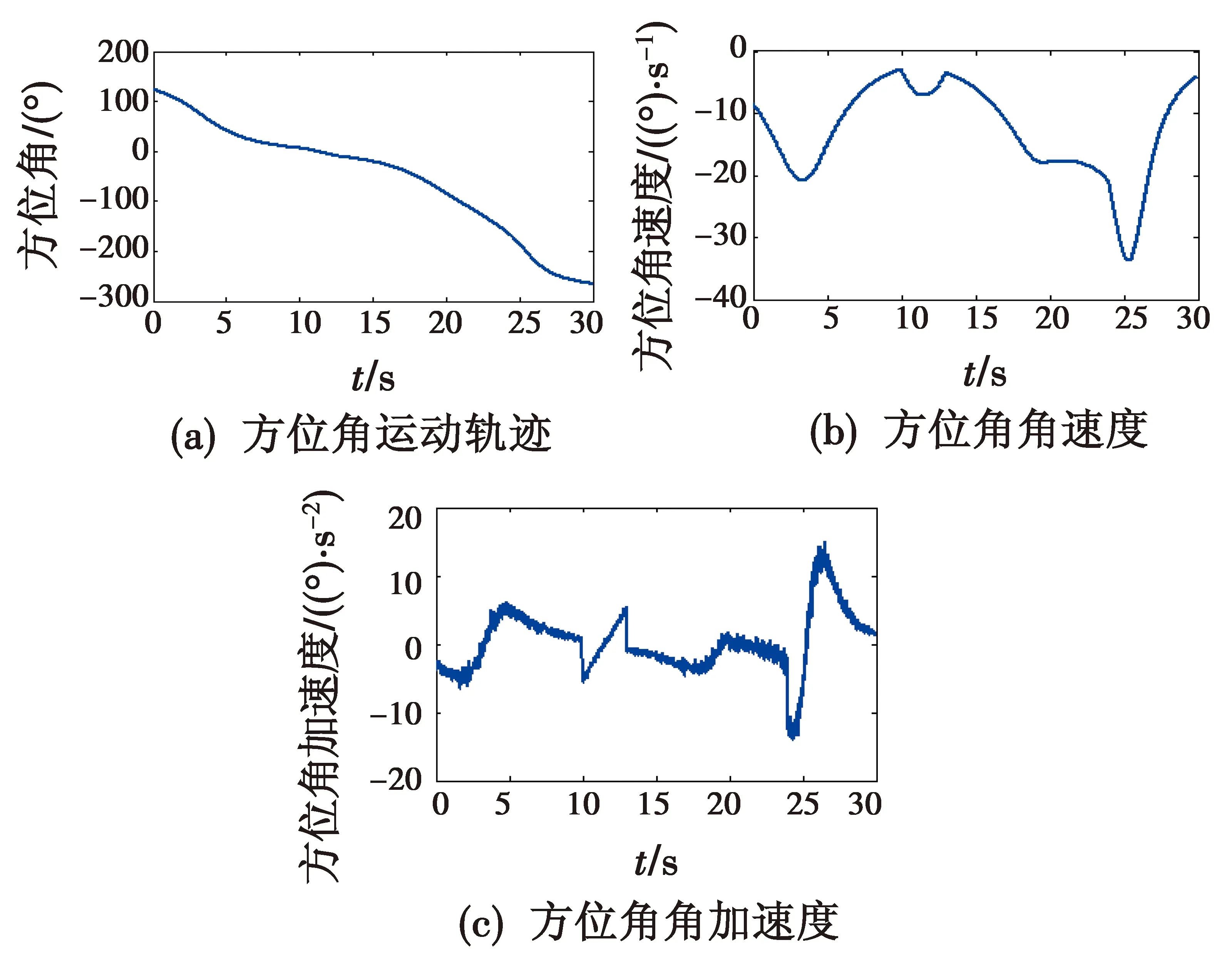
图6 极坐标系下目标方位角运动轨迹

(20)
采用上述实验模拟方法得到的状态估计误差曲线如图7所示,最大估计误差为2.49′,估计随机误差为8″。因此,只要满足伺服运动单元闭环控制精度小于30″,控制随机误差小于28″,即可满足光电经纬仪保精度实验任务跟踪精度要求。
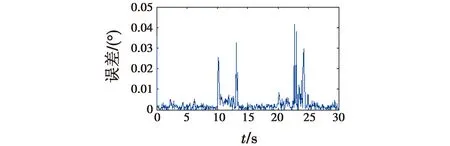
图7 状态估计误差曲线Fig.7 State filtering estimation error curve
3 结论
本文通过对光电经纬仪跟踪运动过程中实时测量的本机或外部的信息数据进行研究,提出综合利用多种光测信息源融合跟踪方法和相应数据处理算法,并通过融合跟踪仿真与估计误差分析证明该方法能够满足靶场目标稳定跟踪需求,同时可保证实时性的要求,达到扩展空间覆盖范围、增强数据信息的可信度、改进探测的性能、提高空间的分辨率的目的。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
小哥白尼(趣味科学)(2022年3期)2022-06-09
心理学报(2022年4期)2022-04-12
水泵技术(2021年3期)2021-08-14
电子制作(2019年7期)2019-04-25
成都信息工程大学学报(2018年3期)2018-08-29
西安工程大学学报(2016年6期)2017-01-15
制导与引信(2016年3期)2016-03-20
中国惯性技术学报(2015年1期)2015-12-19
探测与控制学报(2015年4期)2015-12-15
