基于机载LiDAR的铁路工务设备及周边环境形变分析
2023-02-25 04:42李博闻刘瑞危凤海梁庚石越峰许贵阳
铁道建筑 2023年1期
李博闻 刘瑞 危凤海 梁庚 石越峰,4 许贵阳
1.北京建筑大学 机电与车辆工程学院,北京 100044;2.北京铁科特种工程技术有限公司,北京 100081;3.中国铁路北京局集团有限公司,北京 100860;4.中国铁道科学研究院集团有限公司 铁道建筑研究所,北京 100081
常规铁路人工巡检存在作业效率低、工作环境差、有检测盲区等问题[1],而无人机作为飞行平台搭载相关检测设备,单一架次拍摄范围达百米级,可大幅提高巡检效率。铁路检测应用中,无人机在安全飞行范围内可以快速到达现场,搭载机载LiDAR 对现场进行扫描,并通过后续处理对现场存在的安全隐患进行评估[2]。尤其针对山区铁路,能够忽略地形影响,大大缩短数据获取周期,在铁路工程中应用机载LiDAR 将成为必然趋势。
点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合;形变分析用来计算同一空间点位的距离变化,用于分析对象的表面形态与体积改变[3]。部分学者以点云数据为研究对象进行了形变分析方法研究。李珵等[4]将激光雷达扫描技术用于地铁隧道形变监测,提出基于激光点云的隧道断面连续提取与形变分析方法,为隧道形变动态监测提供借鉴。刘尚昆等[5]应用激光雷达开发了一套能够实现智能化辅助避障的接触网支柱识别与定位系统,采用欧氏聚类和特征匹配相结合的障碍物识别算法,验证了系统的可行性。刘俊博等[6]基于综合检测车搭载的激光雷达设备对铁路边坡表面进行形变分析,结合铁路场景的先验知识在完成配准后通过体素化及区域增长,实现了铁路边坡表面形变的量测。目前在铁路领域中形变分析主要以车载LiDAR 采集的点云数据为主,机载LiDAR 采集的点云数据应用以制作高精度数字高程模型(Digital Elevation Model,DEM)、地形图、横断面等铁路勘测成果为主[7-10]。机载LiDAR 与车载LiDAR 采集数据的不同在于拍摄角度,车载LiDAR 以立面信息为主,而机载LiDAR 以俯视信息为主。目前机载LiDAR 在铁路巡检中采集的点云数据形变分析应用较少。
本文以邯长线K130+874—K135+292 区段为研究对象,基于机载LiDAR 激光点云数据,对区段内隧道洞口附近工务设备及周边环境进行形变分析及评估,为机载LiDAR 数据在铁路巡检上的形变分析应用提供支撑。
1 多期形变分析原理
1.1 单期点云预处理
点云配准是通过一定的旋转和平移变换将不同坐标系下两组或多组点云数据统一到同一参考坐标系下[11]。形变分析的基础是对两期点云进行配准,由于视角和采集时间不同,采集的两期点云可能只存在部分重合;点云是从不同时间、同一类型传感器上获取的,时间和视角均可能变化,会使同一三维位置附近包含噪点或异常值,影响配准结果,因此预处理阶段需对点云进行裁剪、去噪。本文通过设置相同裁剪阈值的方式保证两期点云的重合度符合要求,同时基于统计异常值滤波(Statistical Outlier Removal,SOR)算法[12]对点云数据进行去噪处理,即考虑离群点的特征,将某处点云小于某个密度的点视为无效点;对每个点进行K邻域统计分析,假设点云中所有点的距离符合高斯分布,其密度由均值μ、标准差σ及标准差倍数m决定,大于μ+m σ的点均被视为离群点,进行滤除。
机载LiDAR 采集点云时会覆盖目标区域外一定范围,以满足航线重叠度要求。基于实际关注对象及边界点云对两期点云重合度的影响,在选定检测目标后,对其周边区域设置裁剪阈值,将两期数据在同一阈值下进行裁剪,以提高配准准确度及效率。
1.2 点云配准
在完成点云预处理后,即可对两期点云数据进行配准。选用迭代最近点(Iterative Closest Point,ICP)算法[13]修正两个原始点云的刚体变换(平移、旋转),以最小化所有点集之间的距离。其本质是待配准的目标点云P和源点云Q按一定的约束条件,找到最邻近点(pi,qi),计算出最优匹配参数R和T,使得误差函数最小。其中,pi为待配准点云P中的一点;qi为源点云Q中与pi对应的最近点;R为旋转矩阵;T为平移向量。误差函数E(R,T)为
式中:n为最邻近点对的个数。
1.3 形变分析技术
点云-点云比较(Cloud-to-Cloud Comparison,C2C)方法[14]是最经典的点云形变分析方法,不需要对点云数据进行网格化或栅格化处理,也不需要计算点云表面法线,其距离LC2C量算原理如图1所示。C2C 方法的优点是快速形变分析,适用于检测目标多、算法工作量大的情况;缺点是易受噪点和异常值影响,计算结果误差相对较大。

图1 C2C方法距离量算原理示意
多尺度点云模型比较(Multiscale Model to Model Comparison,M3C2)方法[14]是近几年被证明应用性较强的一种点云形变分析方法,其点云距离LM3C2量算原理如图2 所示。M3C2 方法的优点是通过计算任意方向的地形变化可以估计每个形变值的置信区间;缺点是计算时间较长。M3C2 方法反映的是点的形变量,因此需要对结果进行栅格化处理,增强可视化效果。
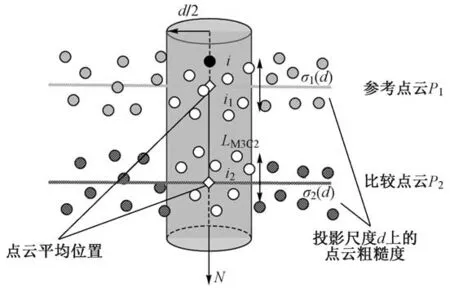
图2 M3C2方法距离量算原理示意
考虑铁路场景待检测目标数量较多,本文针对工务设备及周边环境形变分析问题,先使用C2C 方法快速发现多期点云的形变,对现场是否发生形变做定性分析;在排除数据异常导致的形变问题后,只对经过C2C 方法后发生形变的区段使用M3C2 方法进行形变定量分析;最后通过影像数据及人工现场校核验证结果的准确性。整体技术路线如图3所示。

图3 整体技术路线
2 现场应用
邯长线K130+874—K135+292 段由悬钟至桃城,沿线共有石门隧道、靳家会隧道等6处隧道,隧道长度共计2.2 km。线路以隧道、桥梁、高路基边坡、陡坡石质路堑为主,地形条件复杂,地质灾害、路基病害多发,加之建设时间早、技术标准低,存在防洪隐患,潜在影响着铁路运输的安全。
2.1 机载LiDAR技术
选择M300 无人机搭配Genius16 机载LiDAR 对区段铁路工务设备及周边环境进行排查。激光雷达采样频率320 kHz,扫描视角360° × 30°,测距精度2 cm,如图4所示。作业航高120 m,作业模式下蜂鸟激光雷达高程误差5 cm、平面位置误差10 cm。综合考虑机载LiDAR 设备特点及项目需求,该技术适用于大面积明显形变(形变量大于10 cm)分析,能够满足项目需求。

图4 无人机机载LiDAR巡线系统
在完成现场勘察及确认飞行条件安全后,通过航线规划设计进行现场作业。步骤为:①明确航测范围;②确定航高,推荐航高为50~ 150 m,本次飞行选择120 m;③航速设计,航高与航速共同影响激光雷达获取点云的密度;④航线间距设计,按照激光雷达航带重叠度为10%、正射影像旁向重叠度45%、航向重叠度65%进行设置;⑤按规划完成飞行任务。
系统采集的数据主要包括机载LiDAR 点云的解析数据和影像数据两部分。解析数据需要将GPS 同步静态观测数据与无人机航迹数据通过POSPac 软件进行PPK 融合解算生成高精度的姿态轨迹数据,将轨迹数据导入StarSolve 软件中结合激光扫描文件自动解析生成LAS 格式的点云数据;影像数据可通过对无人机的飞行轨迹进行差分解算,获取每张图片对应的精确坐标文件。
2.2 点云处理
在铁路场景中,裁剪是指通过设置一定的阈值从场景点云中将待检测对象周围一定范围的点云分割出来,隧道洞口裁剪效果如图5 所示。保存裁剪使用的阈值框,多次使用以保证多期待检测部分的点云重合。
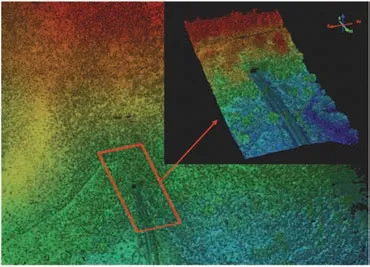
图5 点云裁切前后
在使用SOR 算法去噪过程中,需要设置平均计算的点云数及标准差倍数两个参数。平均计算点云数通常取6~ 12,标准差倍数m通常取1,同时不损失关键点信息。
用于配准的首期点云称为参考点云,后期点云称为待比较点云。经过ICP算法将待比较点云与参考点云进行配准,ICP 配准结果提供均方根(Root Mean Square,RMS)值及转换矩阵参数,RMS 值越小可判断配准效果越佳。以某隧道口为例,分别设置平均计算点云数为50 000,理论重叠度为100%,经过ICP 配准后,最终RMS 值为0.320 6,通过转换矩阵后,能够实现对两期点云的快速配准。
2.3 结果分析
2.3.1 形变定性分析
为验证形变分析方法可行性,对邯长线K130+874—K135+292 区段12 处隧道洞口的两期机载LiDAR 点云进行分析。图6为使用C2C 方法对某隧道口进行形变定性分析。图中排水沟处显示为绿色,表示该处两期点云数据未完全重叠,即发生了形变。由于激光在水面会发生折射,造成能量损失,激光雷达无法收到经水面返回的光,从点云数据的角度,有水则不存在点云。因此无法对水沟的淤积量进行估计,只能检测是否有淤积即是否发生形变。图中最大形变数值1.765 m 实际约为排水沟深度。通过影像数据的定位匹配,图7为5月份和7月份拍摄的正射影像数据,可以明显地观察到水沟的淤积现象。

图6 C2C方法形变分析(第一类情况)

图7 隧道洞口水沟影像数据
由于数据采集的时间、天气条件等因素容易导致点云数据缺失,影响形变分析结果。水沟淤积也可以视为某种程度上的数据缺失。除此之外,C2C 方法对第二类形变问题的分析如图8所示。经过C2C方法的定性分析,图中隧道洞口处发生最大7.006 m 的形变,通过影像验证5月份该隧道洞口前树木生长过高已构成危树隐患,7 月份该树木已经过修剪排除了隐患。结合两类不同的情况,C2C 方法能够有效对现场是否存在形变隐患做定性判断。

图8 C2C方法形变分析(第二类情况)
2.3.2 形变定量分析
M3C2 方法可计算得到形变值的正负,且其值更接近实际。图9 和图10 分别是采用C2C 方法及M3C2方法对区段某隧道洞口旁堆土进行的形变分析。由图9 可知:应用C2C 方法对是否发生变形进行定性分析,可以得到大致形变量为0~ 1.337 m。由图10 可知:应用M3C2 方法可以得到待比较点云相对参考点云发生的形变的正负,其形变为-1.919~ 0.570 m。现场影像数据如图11所示。可知:5月份线路旁有堆土,7月份堆土已经清理;5月份现场实测该区域土堆高约1.9 m。可见M3C2 方法的形变定量程度更接近于真实值。

图9 C2C方法形变分析(隧道洞口堆土情况)

图10 M3C2方法形变分析(隧道洞口堆土情况)

图11 隧道洞口堆土影像数据
综上,邯长线K130+874—K135+292 区段排水沟淤积问题较多,全线隧道排查情况见表1。可知,隧道洞口墙体等基础设施并未发生形变。通过影像及现场人工确认,隐患已得到处理,验证了本文的形变分析流程的可行性。

表1 隧道激光点云多期形变分析结果
3 结语
本文基于机载LiDAR 巡线系统采集的邯长线K130+874—K135+292 隧道铁路场景点云数据,对区段内工务设备及周边环境进行定性及定量形变分析。首先经过点云裁剪、SOR 算法去噪及ICP 配准算法处理点云;其次采取C2C 方法形变定性分析及M3C2 方法形变定量分析,及时发现隐患;最终通过影像及现场人工复核形变成因,通知现场人员排除了隐患。在铁路工务设备及周边环境较大规模形变的对比分析中,本文提供了一种机载LiDAR 数据应用的可行技术方法,有利于提高作业效率及点云数据利用率,降低工务设备巡检难度,有一定的工程应用价值。
猜你喜欢
北京测绘(2022年5期)2022-11-22
建材发展导向(2021年16期)2021-10-12
汽车观察(2021年8期)2021-09-01
哈尔滨铁道科技(2020年1期)2020-07-27
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
减速顶与调速技术(2018年3期)2018-08-27
上海铁道增刊(2017年2期)2017-04-18
上海铁道增刊(2017年2期)2017-04-18
中国工程咨询(2016年1期)2016-02-14