膛内惯性测速系统设计
2023-03-04 13:33周诗超孙建港
计算机测量与控制 2023年2期
温 鹏,周诗超,孙建港,刘 威,李 凯
(中北大学 信息探测与处理山西省重点实验室,太原 030051)
0 引言
近年来,我国国防兵器事业的蓬勃发展为常规武器性能的进一步提升带来了新的机遇和挑战。火炮作为未来战争中必不可缺的常规武器之一,在新的时代背景下也有了更高的发展目标[1]。对弹丸内弹道运动参数的实时测量和利用成为提升火炮性能的一个重要目标[2]。
内弹道运动探测主要研究弹丸从点火到离开发射器身管的运动规律。弹丸在膛内运动短促而复杂[3],探测内弹道运动过程参数变化可预测火炮战场实时使用性能,并且对常规弹丸制导控制具有重要作用[4]。目前有关内弹道运动参数探测的方法主要是对速率的测量。
膛压测试法,其基本原理是测量膛内压力变化后根据内弹道基本理论计算弹丸运动速度和位移变化。膛压测试法可分为铜柱测压法和电子测压法,文献[5]提出用铜柱测压法对火炮的膛压进行测试,同时测得弹丸加速度,并对实现的可能性进行了讨论。文献[6]应用放入式电子测压法对火炮的膛压进行了测试,提出基于弹底压力变化的炮口速度解算方法,测速结果与雷达测速仪测得的炮口速度误差在0.38%~1.38%之间。
区截靶测试法是目前主要的测试弹丸出膛速率的方法,它以弹丸出膛通过炮口间隔靶的平均速度作为弹丸出膛速率[7]。区截靶测试法种类繁多,文献[8]设计了一种可用于轻气炮弹速测量的新型激光测速系统,改进了激光光路和光电转换电路,与传统激光测速系统相比测速结果相对扩展不确定度为0.73%。文献[9]提出了一种差分结构的新型测速线圈传感器,测速信号相比常规线圈传感器提高11.809 dB,相对测速精度达到0.15%,对弹丸测速具有更好的抗噪性。文献[10]基于光幕靶测速方法提出小波分析法检测与识别弹丸信息,寻找弹丸信号的奇异点,获得同一组弹丸速度相对变化最大值与最小值差值小于1.66 m/s,提高了相对测速精度。
高速摄影成像法,这种方法通过外部架设高速摄像机来记录弹丸的运动成帧时间和图像特征,从而对弹丸速率和位置进行测量[11]。文献[12]应用高速摄影技术记录弹丸飞行过程,设计了某型弹丸飞行速度的摄影测量方案,与多普勒雷达测速结果对比相对测速差值小于7 m/s。文献[13]利用高速摄像机、辅助光源等组成高速弹丸摄影系统,采用弹丸目标模板匹配方法测算弹丸速度,与激光测速结果对比相对误差小于0.05 km/s。文献[14]提出一种火炮发射视频自动化测速方法,利用计算机视觉得到炮弹的速度,通过与传统方法比较试验,验证了其真实火炮的测试结果。
多普勒雷达测试法根据电磁波波长与频移之间的关系解算出弹丸速率[15]。文献[16]设计了一种窄带多普勒信号实时处理系统,使用信号频谱搬移后再处理的方法求出弹丸初速,实测信号与给定信号频率误差小于160 Hz,计算时长小于3 s。文献[17]提出基于FFT的快速小波变换和模的小波脊提取方法,对多普勒雷达弹丸测速信号处理计算得到速度,与激光测速系统相比误差优于0.2%。文献[18]设计了一种可应用于内、外弹道参数测试的毫米波测速雷达,采用谱分析和最小二乘法推算得到弹丸初速,测试精度达0.1%。
弹载存储测量法使用弹载惯性传感器测量弹丸加速度变化,文献[19]利用单片机设计了一种弹载加速度信号采集存储系统,文献[20]设计的测试仪能够记录弹体侵彻过程中的三维加速度数据,得到的数据回收后,再进行分析计算得到弹丸出膛速度。文献[21]进行了基于弹丸惯性力的加速度测量实验,根据弹丸前沿加速度的变化计算得到弹丸速度。
现有测量弹丸速度的方法主要存在以下问题:膛压测试法需要在身管上开孔破坏火炮身管结构,测速数据不能实时用于制导炮弹处理器[22];区截靶测试法需要在炮口布设区截装置,不同类型的区截靶适用环境不同,不能获得内弹道全过程速度[23];高速摄影成像法也需要在外部安装设备,设备对环境要求比较高,也不能获得内弹道全过程速度[24];多普勒雷达测试法容易受到复杂电磁干扰导致频谱失准,现有测速算法耗时长,不能实时计算弹丸速度[25];弹载存储测量法可以获得内弹道全过程加速度变化,但目前只是将数据获取回收后在电脑上分析计算,未进行片上实时处理计算和利用[26]。
针对上述方法存在的问题,本文基于MEMS加速度传感器和姿态传感器设计了膛内惯性测速系统,通过分析弹载内弹道运动测量原理,根据使用环境设计硬件系统,在FPGA上设计Kalman滤波算法和四元数姿态算法,对原始信号处理计算得到内弹道过程弹丸加速度、速度和位移变化。既可以将测量结果存储到系统存储器中又可以将实时数据上传到制导炮弹处理器。
1 弹丸内弹道过程测量原理
1.1 弹丸运动加速度测量原理
弹丸在内弹道运动阶段主要经历坡膛挤进过程、膛内运动过程和出膛过程。在弹丸运动过程中采集一系列的加速度值,根据式(1)和(2),采用数值积分的方法可以得到弹丸实时运动速度和位移:
v(n)=v(0)+
(1)
s(n)=s(0)+nv(0)Δt+
(2)
式中,v(0)为初始速度;a(0)为初始加速度;a(1)~a(n)为被采样的n个加速度点;s(0)为初始位移;s(n)为积分得到的位移信号;Δt为加速度信号采样间隔。
根据弹丸轴线运动速度由式可得弹丸转速:
(3)
式中,N为弹丸转速,单位为rad/s,α为膛线缠角,r为弹丸半径。
根据式(4)、(5),可以得到不同时刻弹丸的整体受力。
(4)
(5)
1.2 运动姿态测量原理
弹丸在内弹道运动阶段并不是理想的直线,弹丸运动姿态测量一方面能够还原弹丸运动时振摆情况,另一方面可以确定弹丸挤进时刻和出膛时刻。

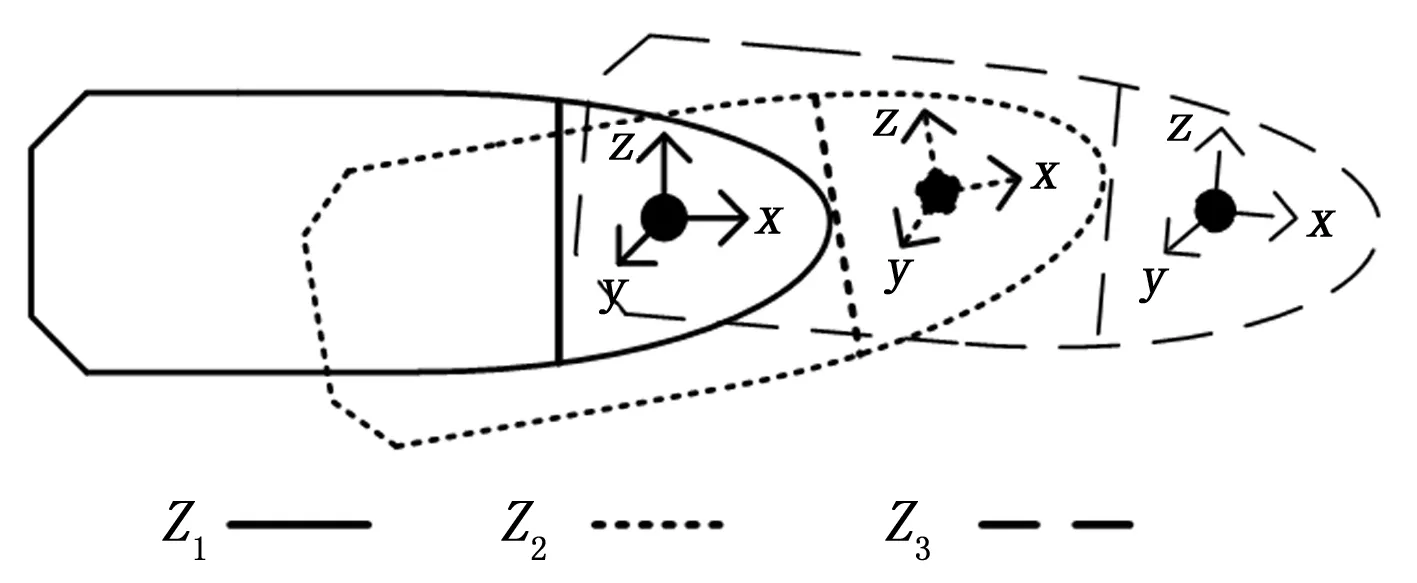
图1 弹丸姿态变化示意图
(6)

(7)
由四元数得到弹丸姿态变化角:
γ= -arcsin[2(q1q3-q0q2)]
(8)
式中,γ、θ、ψ分别为弹丸相对上一次姿态的俯仰角、偏航角和滚动角。
1.3 挤进和出膛时刻判别原理
姿态加速度测量值在弹丸未受火药燃烧气压作用时的合加速度满足:
(9)
挤进时刻弹丸受力急剧增大,合加速度满足:
(10)
(11)
忽略弹丸出膛后的空气阻力,同理弹丸出膛后的受力满足式。弹丸姿态判别如图2所示。
图2 弹丸姿态判别示意图
1.4 Kalman滤波原理
为了进一步提高测量精度,应用Kalman滤波对传感器采集到的原始信号滤波,式描述了状态量和观测量之间的关系。系统采集测量过程是一个动态系统,存在测量噪声并且满足高斯分布特性,
X(k)=ΦX(k-1)+ΓW(k-1)
Y(k)=HX(k)+V(k)
(12)
式中,k表示离散的时刻,X(k)为系统在k时刻的状态估计值,可由前一时刻的状态值X(k-1)和两时刻间系统内的输入噪声W(k-1)表示,Φ为状态转移矩阵,Γ为噪声的驱动矩阵,反映输入噪声的变化;Y(k)为系统测量值,H为观测矩阵,反映系统中状态量与观测量之间的联系,V(k)为观测过程中引入的噪声。
使用Kalman滤波算法处理单一加速度变量数据时,需要经过式(13)统计中间量对式(12)迭代更新。
P(k+1|k)=ΦP(k|k)ΦT+ΓQΓT


K(k+1)=P(k+1|k)HT[HP(k+1|k)HT+R]-1

P(k+1|k+1)=[In-K(k+1)H]P(k+1|k)
(13)
式(13)中,P(k+1|k)表示前后相对时刻最优估计值方差,R表示观测噪声的方差,In为单位矩阵表示测量过程中的信号是一维信号,ε(k+1)表示单位时刻的阶跃变化,Q表示超参数矩阵,K(k+1)表示卡尔曼增益。
2 系统硬件设计
根据弹丸在内弹道阶段的运动特点和应用背景,设计系统结构如图3所示。为了不改变现有的火炮装备结构,整个系统设计在一个直径90 mm的PCB上,嵌入于122 mm口径火炮弹丸的引信区,PCB平面与弹丸圆截面同心且平行。系统主要由4个传感器组成,其中MEMS加速度传感器a1、a2、a3相互正交安装,a1测量弹丸在内弹道运动阶段沿弹丸轴线的前进加速度,图示为x轴;a2和a3测量弹丸与膛线部的碰撞加速度,图示分别为y轴和z轴;传感器a4为小量程MEMS六轴姿态传感器,其三个测量方向与a1、a2、a3同向,用于弹丸运动的姿态测量判断。

图3 系统结构组成图
本系统硬件系统方案如图4所示,主要由传感器、信号调理采集电路、FPGA控制器、NAND FLASH数据存储器、数据通信模块和电源管理系统组成。选择用于炮弹惯性测量的大量程、高灵敏度、耐高温、可抗10 000 g过载的专用MEMS传感器。系统工作时,传感器采集到信号后,通过信号调理电路实现滤波、基准搬移,经A/D转换电路将模拟信号转换为数字信号传输到FPGA控制器,FPGA对数据进行处理计算、存储以及通过数据通信模块上传到具有制导功能炮弹的弹载处理器。
图4 系统硬件组成图
2.1 信号调理采集电路
所用MEMS传感器是模拟量输出型的传感器,在实际情况中得到的信号中包含有许多噪声,信号调理采集电路针对信号中含有的随机不平稳噪声设计具有高阻抗和高信噪比特性的有源滤波电路,同时满足传感器输出带宽要求。
A/D转换电路选择位宽为16 bit,采样率为2.5 Msps的LTC2389芯片设计,考虑到高速采样环境下可能出现的共模噪声对采集的影响,芯片设计为全差分模式将加速度信号输入到FPGA控制器。
2.2 FPGA控制器
整个系统都以FPGA为核心的控制处理器进行,为了快速执行系统功能和处理数据,采用XILINX公司的XC6SLX9-2TQG144C芯片设计。系统在最高采样率时获取到大量数据,为了能够及时处理这些数据,使用CMT时钟管理单元的IP核实现系统处理时钟倍频,从而实现大数据量下的及时处理功能。FPGA控制处理器与系统其它各个部分连接,所以设计的通信功能有与A/D转换芯片的16位并行数据线,与六轴姿态传感器的IIC通信协议,与数据存储器的ONFI通信协议,与数据通信模块的SPI和UART双协议。
2.3 数据存储器设计
为了将采集到的传感器数据存储起来,同时能够做到掉电不丢失和数据回收,数据存储器设计采用镁光公司的大容量NAND FLASH芯片MT29F1G16AAD。传感器数据获取速率为2.5 Msps,一般的炮弹弹丸在膛内运动时长是几毫秒到几十毫秒,本系统试验在实验室环境中采用模拟击发的方式进行,根据模拟弹丸在内弹道运动的时间长度计算单通道数据存储深度为312 500 byte,即125 ms的测量时长,因此设计每5个存储块为一个单元,其余未用到的块作为备用。
2.4 数据通信模块
数据通信模块用于实现系统和制导炮弹处理器的指令通信和数据上传。由于通信指令与数据相比简短且量少,因此将这两个功能分别实现,以减少系统资源消耗。所设计的通信模块包括网口通信和串口通信:
1)网口通信选用W5300芯片设计,实现100 M以太网控制功能、MAC和TCP/IP协议栈功能,80 Mb/s的最高通信速率,满足数据存储器中的数据和终端的实时大吞吐量快速上传,节省数据读取时间,为了增大计算机的访问冗余开发支持8个端口的外部访问功能。
2)串口通信应用CP2102芯片设计,实现与外部指令的交互功能,将简短,小数据量指令以高速低比特流的形式在制导处理器和本系统中传输,可以不占用额外的通信带宽。
2.5 电源管理系统
本系统需要不同电压并且需要严格控制上电时序,用EA3059芯片设计电源管理系统,EA3059是一款4通道电源管理芯片,具有多路电源输功能,系统供电使用7.4 V锂电池提供,使其分别转化输出1.2 V的FPGA内核电压,3.3 V的FPGA引脚输入输出电压,1.8 V的六轴传感器供电电压,5 V的加速度传感器、信号调理模块、数据存储器和数据通信模块供电电压。在设计时考虑到电源可能引入噪声,故在电源输出端放置钽电容和陶瓷电容分别滤除电源上的高频干扰和低频干扰,从而有效地降低电源噪声,提升电源系统稳定性。
3 片上程序设计
3.1 程序功能
系统上电之后对各个部分初始化。弹丸击发时制导炮弹处理器将外部指令通过串口发送给本系统,系统执行后续的不同功能程序。对于错误指令,系统通过串口向制导炮弹处理器发送指令错误反馈。
膛内运动状态判断功能的实现利用姿态传感器原始数据经过四元数算法计算判断,如果符合式和则表明着弹丸挤进坡膛,从而实现挤进开始计时,FPGA控制器根据ADC芯片设计的采样间隔计时。姿态传感器原始数据经过四元数算法再次满足式的条件时,表明弹丸出膛,停止计时获得弹丸运动的时长。
根据算法原理特点四元数姿态解算过程可设计为顺序执行,用Kalman算法对加速度信号中的线性高斯分布特性噪声滤波处理,设计片上Kalman算法实现这个功能。数据管理功能主要实现运动参数的存储,因此需要对数据存储器擦除,读取和写入。
3.2 数据存储控制
数据操作按照芯片的命令码完成,主要实现数据擦除、数据读和数据写的功能。数据在被写入到存储器之前,需要对存储器里的内容擦除,擦除过程实现坏块识别,数据写入时避开坏块,根据ECC校验流程自行校验。数据基本操作的流程如图5所示。
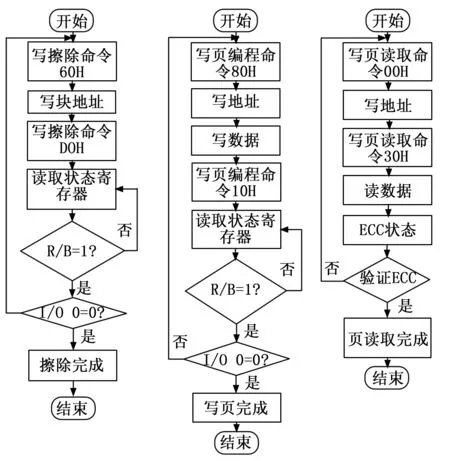
图5 数据存储控制流程图
3.3 片上Kalman滤波算法设计
Kalman滤波原理含有多个过程,为了使Kalman滤波算法在FPGA上实现,利用FPGA的并行计算能力压缩运算流程,提高程序实现功能的速度,将式和(13)合为三个程序模块实现加速度数据Kalman滤波,模块一和二产生的当前输出结果用于模块三输出结果的下一次更新输入。Kalman算法程序结构如图6所示。
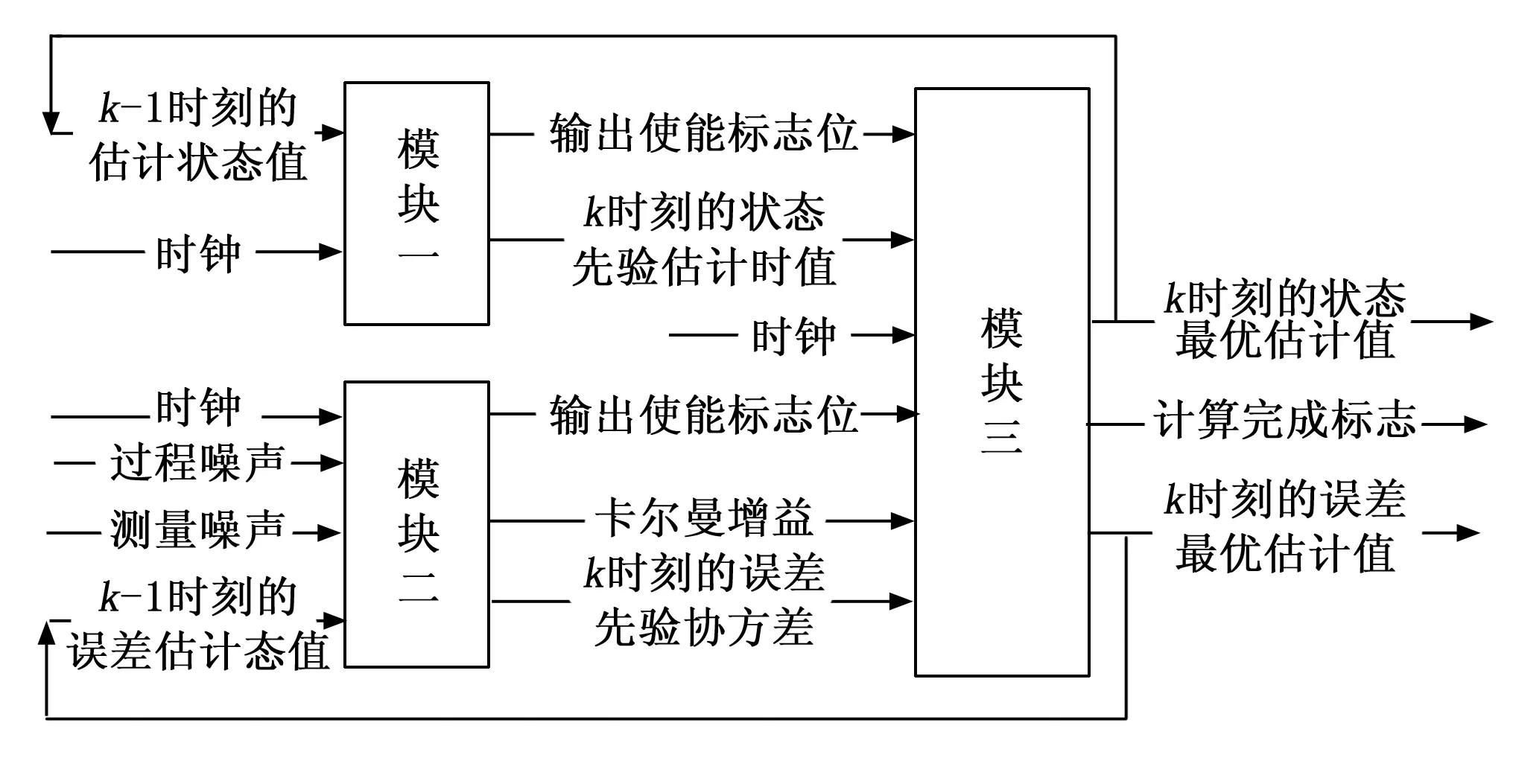
图6 Kalman滤波算程序结构图

3.4 片上四元数算法设计
片上四元数算法实现过程如图7所示,单次获得姿态数据经过Kalman滤波后进行重力加速度归一化计算,实现初始坐标参考系设定;提取重力在各个轴向的分量,求出姿态误差后对误差积分,从而实现对迭代产生误差的互补滤波;求解四元数微分方程后对四元数归一化计算,根据四元数计算欧拉角输出弹丸姿态角数据。
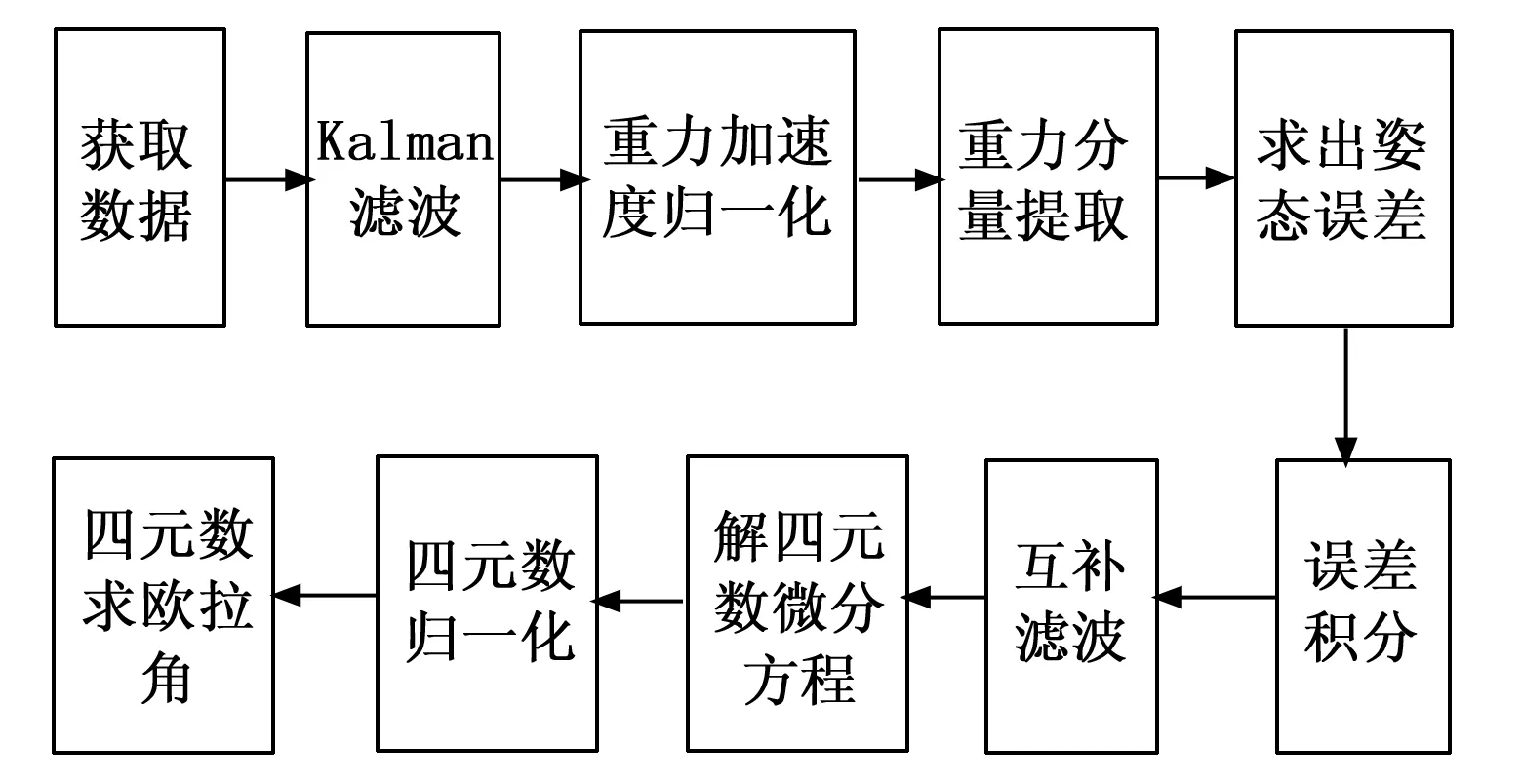
图7 片上四元数算法实现过程图
4 试验验证
4.1 试验步骤和方法
试验采用长度为3.451 m的身管局部,将质量块从一定高度,以自由落体的方式产生势能从而带动测试系统装置运动,模拟弹丸被击发的过程。在本模拟实验中为了更精确地获得弹丸姿态和运动状态判别,使质量块从不同高度下落以满足弹丸测试装置获得不同的能量进行多次试验。在出膛口设置了两对间隔为5 cm的激光对管以区截靶的方式测试出膛速率。测试完毕后,将系统中存储的读的数据上传到本地计算机并绘制可视图像,将每次出膛速率与激光式区间截靶得到的速率对比,将每次出膛位移与身管长度对比,对弹丸姿态变化、速度变化和位移变化进行结果说明和分析。试验说明如图8所示,试现场如图9所示。
图8 试验说明示意图
图9 试验过程现场图
4.2 运动姿态测量结果
弹丸在膛内运动时的姿态角变化试验结果如图10所示,测量结果显示弹丸的姿态角变化不大,是因为模拟弹丸的击发过程试验采用的身管为缠度较小的等齐膛线,所以测量结果符合实际。结果显示弹丸在膛内的整个运动过程中,俯仰角在84°上下波动,偏航角基本在0°上下变化,翻滚角在112°上下变化,相比俯仰角和偏航角,翻滚角变化范围较大。将弹丸的姿态变化导入三维姿态变化软件按照等时间抽取展示如曲线下方,直观显示三维弹丸模型运动姿态程振摆式运动。
图10 弹丸姿态变化图
姿态传感器测量到的加速度变化试验结果如图11所示,可以看出弹丸在开始运动之前保持稳定,整个弹体受地球重力加速度,大小约1 g,其y轴基本与重力方向同向,x轴、z轴由于与y轴正交,获得的重力加速度基本为0。弹丸开始运动时判定为弹丸挤进,记弹丸开始运动的时刻为0时刻,判定依据为弹丸z轴加速度突变增大,x轴、y轴由于z轴受到大加速度,分量变小趋近于0;在0~103.74 ms内,弹丸在膛内运动,判定依据为弹丸基本保持z轴满量程输出状态;在103.74 ms时,姿态加速度变化基本恢复到弹丸开始运动之前,合加速度约等于重力加速度,判定为弹丸出膛,整个过程得到弹丸在膛内运动时间103.74 ms。
图11 姿态加速度变化图
4.3 运动速度测量结果
试验过程中弹丸出膛时经过光电对管的信号试验结果如图12所示,结果显示弹丸通过两个光电对管的时间间隔为10.86 ms。根据两对光电门间隔为5 cm计算出弹丸出膛速率约为4.604 m/s。
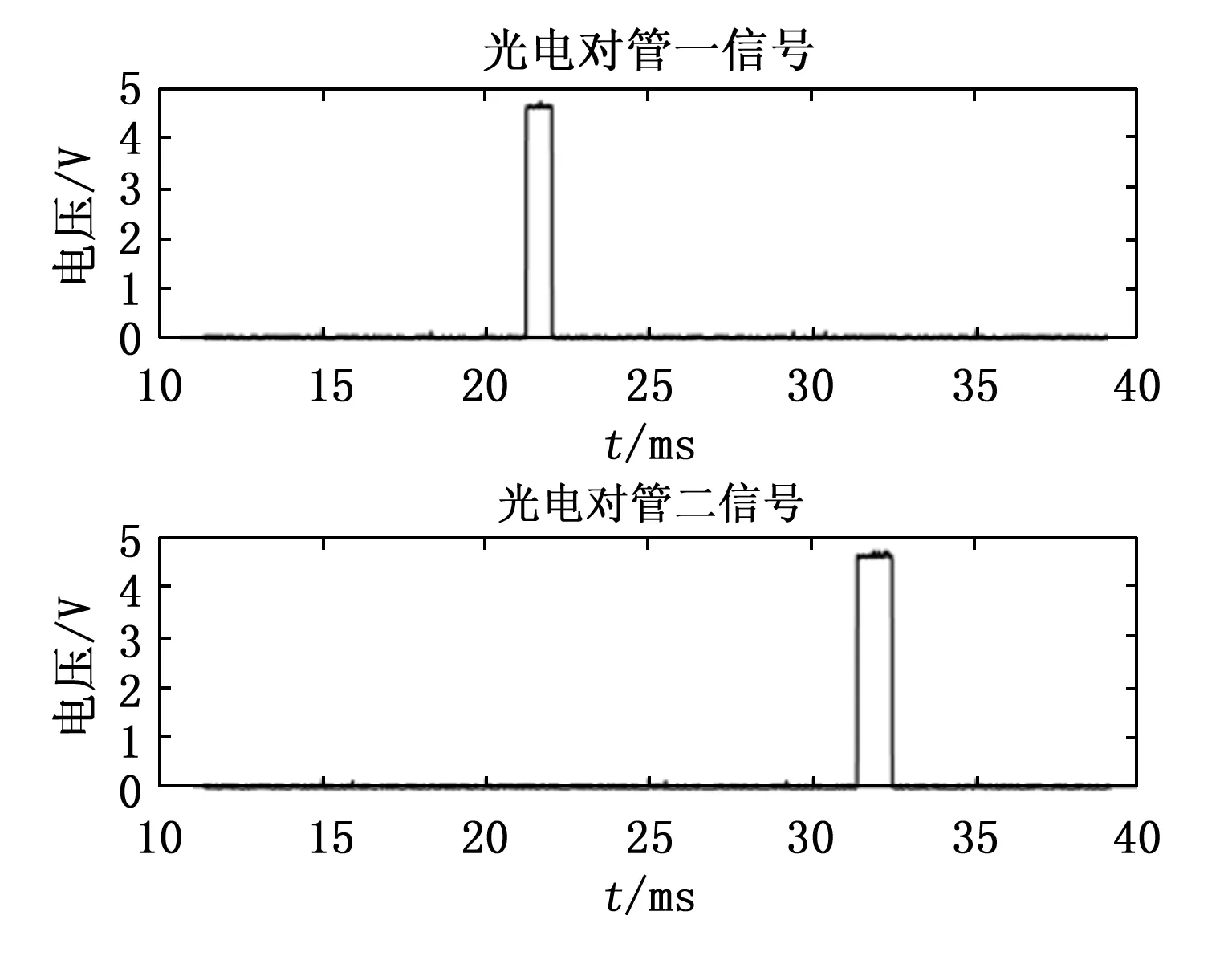
图12 光电对管测时信号图
弹丸在身管内运动时的加速度随时间的变化试验结果如图13所示,可以看到原始带有噪声的采集信号经过Kalman滤波后变得平滑。其中弹丸x轴加速度在弹丸开始运动后急剧增大,y轴z轴数据有波动但不大。对各轴的加速度片上积分得到速度和位移随时间变化曲线。由计算结果得到弹丸在x轴向运动了3.394 m,出膛速率为4.469 m/s。根据y轴z轴的结果显示弹丸在径向发生了相对振动运动,y轴累计位移在5 cm内,振动速度在0.75 m/s内,z轴累计位移在2.5 cm内,振动速度在0.75 m/s内。
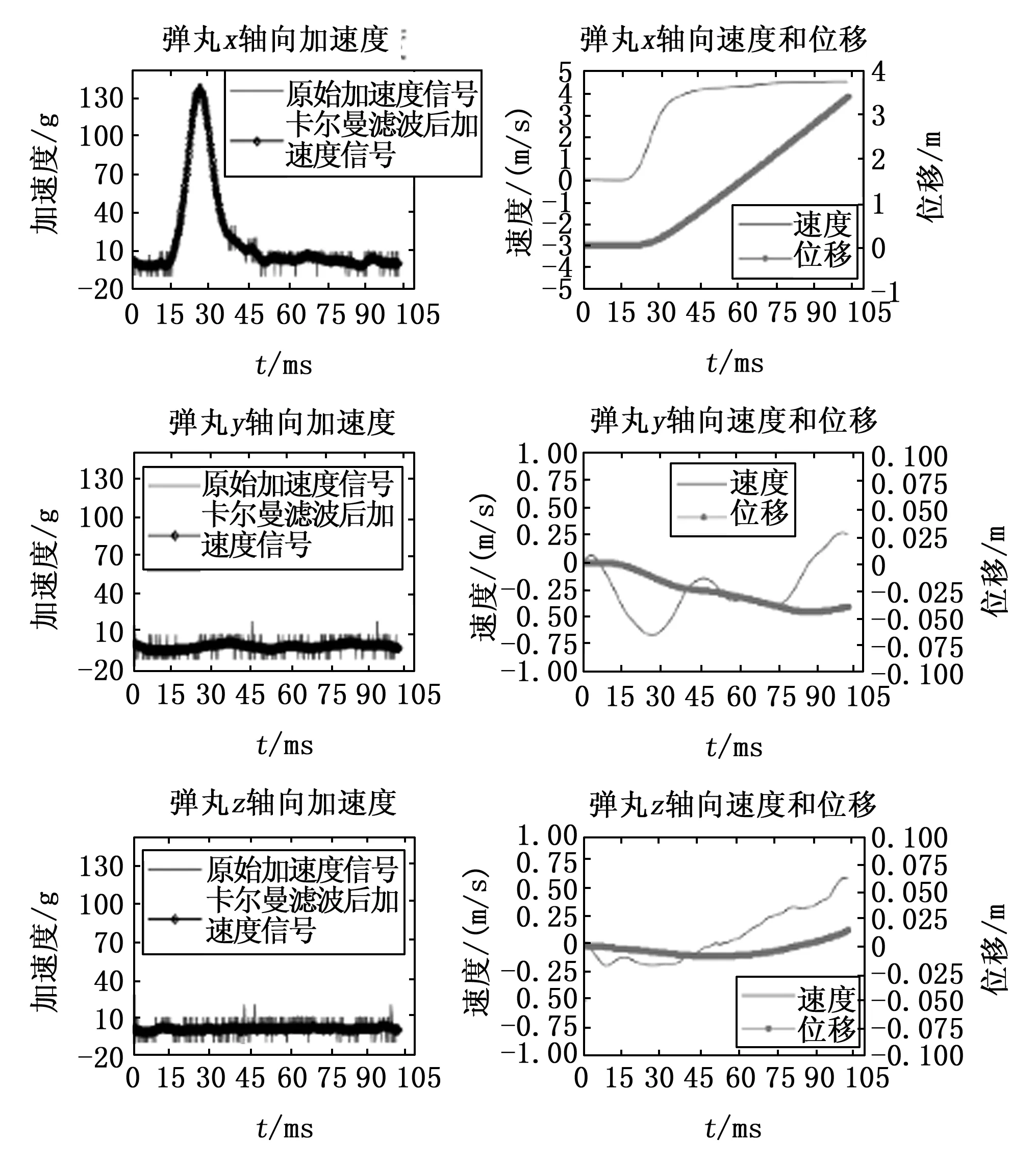
图13 弹丸加速度、速度、位移变化图
表1为五次试验结果对比,试验结果表明本系统测量得到的出膛速率与光电门式测量速率最大相对误差分别为2.93%,内弹道运动路程和身管长度对比最大相对误差为1.85%。
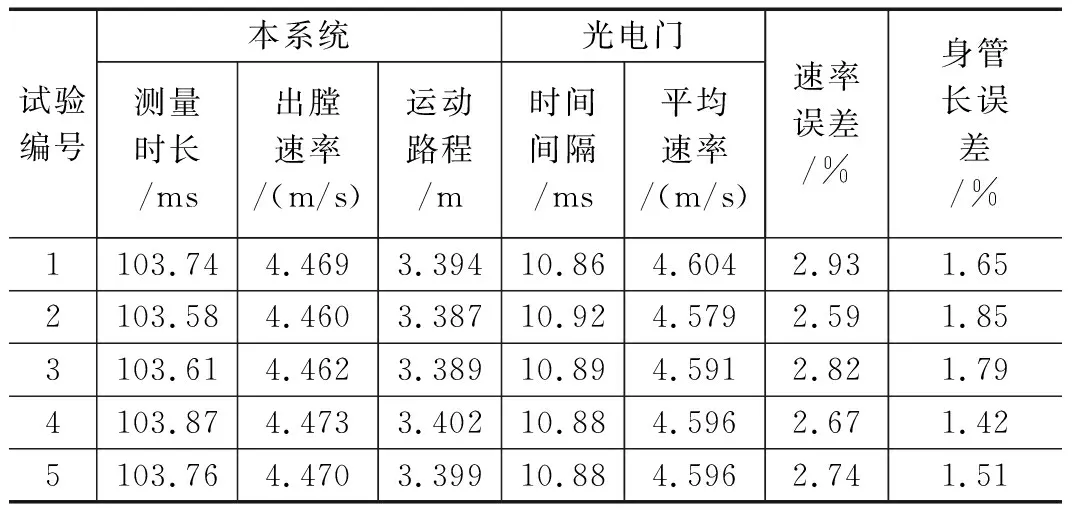
表1 五次试验结果对比
5 结束语
本文设计了一种基于MEMS加速度传感器和六轴姿态传感器的膛内惯性测速系统,实现了FPGA片上Kalman滤波算法和四元数姿态算法处理原始信号,得到内弹道过程的运动参数变化。模拟试验表明,速率和位移相对误差分别小于2.93%和1.85%。与现有的测量方法相比,本系统可实现弹丸内弹道全过程运动参数的获取,可把运动数据实时提供给制导炮弹处理器,具有准备过程简单,空间适应能力强的特点。
猜你喜欢
广东石油化工学院学报(2022年4期)2022-09-13
小哥白尼(趣味科学)(2022年3期)2022-06-09
小学生必读(中年级版)(2021年12期)2021-12-02
学生天地(2020年3期)2020-08-25
兵器装备工程学报(2020年3期)2020-04-22
电子制作(2019年7期)2019-04-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
制导与引信(2016年3期)2016-03-20
弹箭与制导学报(2015年1期)2015-03-11