智能物流技术跨领域融合的模式及趋势研究
2023-03-17 13:00苏丽芳楼旭明丁海瑜
科技管理研究 2023年3期
刘 立,苏丽芳,楼旭明,成 泷,丁海瑜
(1.西安邮电大学经济与管理学院;2.西安邮电大学现代邮政学院,陕西西安 710061)
1 研究背景
物流技术与新一代信息技术等跨领域技术的深度融合,强化了物流产业与相关产业间的联动效应,推动物流行业向智能物流转型升级[1]。智能物流技术不断发展的实质是在原有技术基础上多种相关技术知识的跨领域整合和创新[2],根据王媛等[3]、李树刚等[4]的研究,科学客观地分析智能物流技术跨领域融合对于创新主体技术R&D、资源合理配置以及物流产业技术创新及产业升级具有重要的研究意义和理论价值。随着融合现象的兴起以及跨领域技术的普遍结合,学者们基于不同角度对跨领域融合进行广泛研究。融合模式的研究能够从深层次挖掘产业核心和发展规律,进一步为战略布局提供参考意见[5];融合趋势预测是降低产业环境变化风险、企业竞争环境不确定性的有效方法[6],能够解决市场动态竞争等带来风险和挑战,跨领域融合模式及趋势预测研究的重点在于探索跨领域融合发展的特征,并在此基础上科学合理地预测融合发展方向,由此可见,模式及趋势预测研究是关系紧密的统一体,然而现有文献分别集中在融合模式及趋势预测研究,无法体现融合发展的连续性。
数字创新背景下,信息、知识、技术深入交互增加了跨领域融合的机会,不断加强技术累积效应,逐渐打破产业边界[2],使得以产业为核心的融合成为当前融合模式相关研究的重点,特别是智能物流等新兴产业的融合模式。比如李丫丫等基于案例分析将战略性新兴产业的融合模式划分为技术融合模式、产品融合模式[7],以及市场融合模式;由于静态分析的缺陷,基于动态演化过程的研究将人工智能跨领域融合模式依据中间人理论归纳为4种。基于此,本文将借鉴陈钰芬等研究方法[5],分析智能物流跨领域融合的独立发展模式、单向型融合模式和两种类型双向型融合模式。
学者们主要从基于相似性的链路预测算法、概率模型、最大似然模型、网络嵌入模型等方法展开研究[8],以此预测网络中可能存在的缺失连边和未来可能产生的连边等[9]。随着研究的深入和新兴技术的蓬勃发展,节点属性和网络拓扑结构信息在链路预测模型中的作用逐渐被发掘,并将这种模型引入专利共现网络。比如Kwon等[10]采用专利共现网络,构建了基于技术相似性、技术普适性、技术独特性指标的链路预测模型;Lee等[11]基于局部相似指标AA开展技术融合预测研究;Kim等[12]基于链路预测理论中局部相似性计算潜在的技术融合关系[12]。由此可见,基于相似性指标的链路预测是当前对融合进行预测的有效方法,已得到普遍应用,因此,本文将借鉴Kim等基于技术节点间局部相似性的方法,从Jaccard指标、PA指标、RA指标三方面对智能物流跨领域融合的趋势进行预测。
考虑到智能物流技术的跨学科、跨领域、跨产业等特征,以及物流产业在国民经济中的支撑地位,使得准确把握智能物流技术跨产业融合的发展方向,对制定发展策略具有重要意义。因此本文将以智能物流产业为例,对跨领域融合的模式及趋势预测进行研究,以把握智能物流技术融合发展的规律,明确未来智能物流技术跨领域融合的发展方向,以期为企业和科研机构制定发展规划提供理论依据。
2 研究设计
2.1 研究框架
专利被认为是进行融合相关研究的重要数据源,体现90%~95%的发明信息[13],本文将采用专利数据从技术共现角度分析智能物流技术产业融合发模式及趋势预测。具体如下:(1)智能物流产业数据收集及清洗;(2)依次构建IPC4共现网络和产业融合网络;(3)分析智能物流产业融合发展的模式;(4)构建产业融合趋势预测模型;(5)有效性检验及智能物流技术跨领域融合趋势预测;(6)预测结果分析及发展建议。
2.2 研究方法
2.2.1 专利共现分析
专利共现分析作为挖掘专利信息的有效方法,被广泛用于技术融合相关研究。专利共现是指两个或两个以上不同IPC分类号在同一条专利中同时出现,通常使用IPC4代表IPC分类号,利用IPC4共现矩阵反映专利之间的共现关系。基于此,本文参照NACE-IPC4对应表将专利技术对应到产业领域,构建专利IPC4共现网络和产业融合网络,以IPC4为技术节点,技术关系为连接构建技术、产业关系网络,探析不同产业部门中技术领域、产业之间关系的融合关系[4]。
2.2.2 基于中间人理论的跨领域融合模式分析
中间人的本质是资源传递过程中的媒介,与直接或间接相连的节点进行资源传递[5],社会网络分析理论将中间人角色分为协调人、顾问、守门人、代理人、联络人5种,原理如图1所示,其中,黑色节点表示不同类型中间人角色。协调员结构单一,充当同一技术领域中的传播媒介;顾问是对同一领域的资源进行传递,但其本身属于另一领域;守门人与下游节点属于同一领域,上游节点来自其他领域;代理人则与上游节点属于同一领域,下游节点属于其他领域;联络人则以第三领域的身份充当不同领域技术的资源传递媒介。
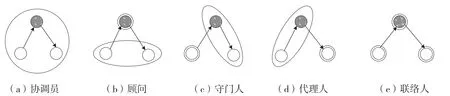
图1 中间人作用原理
本文借鉴中间人角色识别技术跨领域融合的模式[5],原理如图2所示,由于专利共现网络为无向网络,无法区分守门人和代理人,因此将这两种角色下的融合模式视为单向型融合模式;顾问和联络人表现出两次跨产业融合,称为双向型融合模式;协调人的IPC4节点涉及一个产业领域,表现为独立发展模式,中间节点IPC4主要通过传递产业内部资源促进产业内融合。单向型融合模式存在一条与外部联系的路径,通过一次跨产业行为传递资源,中间节点IPC4主要通过整合产业内部和外部的资源推动产业间的融合;双向型融合模式涉及两次跨产业传递资源行为,但以联络人为代表的双向型融合模式涉及3个产业领域,与以顾问为代表的双向型融合模式相比,中间节点拥有更多的异质知识,加速推动产业间的融合。
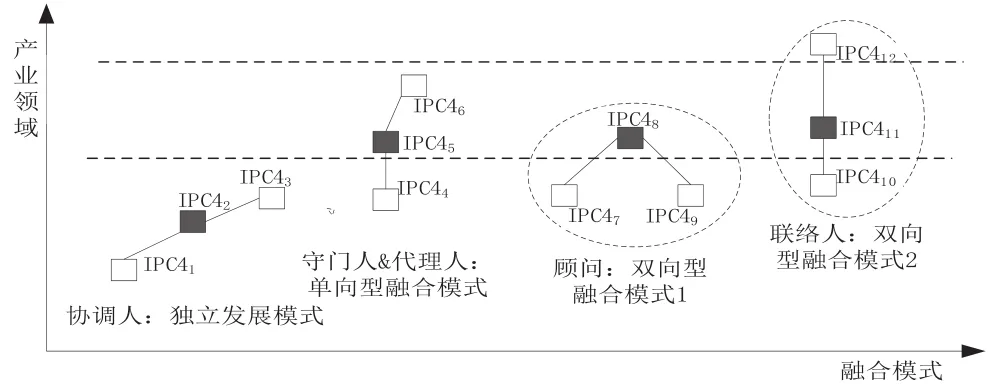
图2 跨产业融合模式原理图
2.2.3 基于相似性的融合趋势预测模型
局部信息相似性的实质是通过节点局部信息,计算节点间相似性,基于相似性得分估计未来融合的概率。通常计算复杂度较低,精度准确,适合大规模网络分析。本文从Jaccard指标、PA指标、RA指标三方面测度节点间相似性[12]:
(1)Jaccard指标。考虑两个节点共同邻居数量的同时也考虑所有邻居的数目,计算如公式(1)所示。
(2)PA指标。无标度网络中,一条新边连接到节点的概率与该节点的度成正相关[14],度中心性越高,未来形成新连接的可能性越大,计算如公式(2)所示:
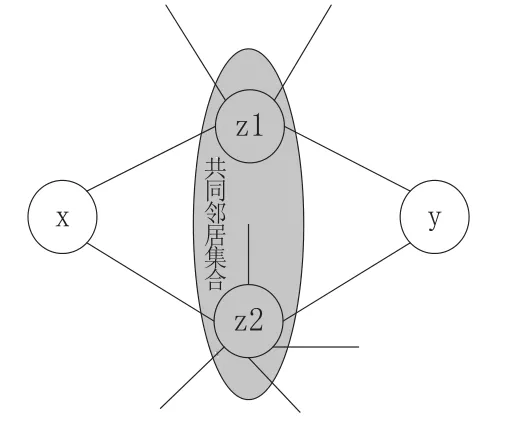
图3 计算RA、PA指标示例图
Jaccard、PA、RA指标均通过捕捉 和 的接近程度,进行跨产业融合关系的预测,但对技术和产业网络进行关系预测时侧重点不同,Jaccard关注节点间的共同邻居、PA重点考虑节点度中心性的作用、RA重视资源传递的重要性,因此Jaccard、PA、RA在构建链路预测模型时呈现相辅相成的互补关系。由于Jaccard、PA、RA的测度结果的最大值和最小值不同,无法直接进行比较,需对其进行标准化处理,计算如公式(5)所示。
其中,s表示两节点产生新连接的可能性。
2.2.4 链路预测模型评价
AUC评价指标表示在测试集上随机选择一条边的分数值大于随机选择一条不存在边的概率,用来衡量链路预测模型的准确性。分别随机在测试集和不存在的边中选择一条边,比较两条边分数值大小,若测试集边的分数值大于不存在边的分数值,则说明预测结果精确,加1分;若测试集边的分数值等于不存在边的分数值,则反映预测结果等同于随机选择,加0.5分;假设测试集边的分数值有次大于不存在边的分数值,测试集边的分数值有次等于不存在边的分数值,AUC计算如公式(6)所示:
由此可知,AUC取值区间为(0,1),当所有分数值都是随机产生的时,,因此当AUC大于0.5时,表明该算法比随机选择的方法精确。在评价指标计算过程中,n的取值决定模型精确度,当网络规模较大时,为了减少计算复杂度,提高计算效率,通常采用随机抽样的方式计算得到一个近似的AUC值。由公式6可知,n越大,AUC越接近精确值。吕琳媛[15]应用伯努利试验对最佳抽样次数n进行评估发现,在保证AUC值保持90%的可信度时,最多需要进行672 400次抽样。本文将n值取值为60 000,即独立取值比较50 000次并求平均来确定最终AUC的值,以此验证预测模型的准确性。
3 实证分析
3.1 数据来源
研究数据来源于德温特专利数据库(Derwent Innovations Index),该数据库涵盖专利文献覆盖面广,收录了最新技术信息,具有较高权威性。在DII输入检索式TS=(logistic* OR deliver* OR load* OR terminal* OR order* OR route*)AND TS=(intelligen*OR smart* OR self-adapt* OR self-learn* OR selfstudy* OR self-taught* OR adapt* OR learning*),检索时间为1996—2020年,检索日期为2021年9月1日。通过数据清洗与筛选,共收集智能领域117 454项专利。从微观层面分析单元为IPC4子类,共659个;宏观层面基于IPC4子类和NACE代码之间的一致性,将IPC4子类映射到45个产业部门。
总体上,智能物流产业专利呈现增长趋势,如图4所示,具有阶段发展的特征,依据技术生命周期理论,按照专利增长率将智能物流产业发展划分为四个时间阶段:1996—2006年为平稳过渡期,专利数量一致处于较低水平,专利总量1 373项;2007—2011为平稳发展期,呈现稳定增长的发展态势,专利总量6 571项;2012—2017为快速发展期,专利呈现井喷式增长现象,专利总量45 507项;2018—2020为成熟稳定期,这一时期大量新兴技术的出现,使得智能物流出现技术创新瓶颈,专利数量增速减慢,专利总量64 008项。
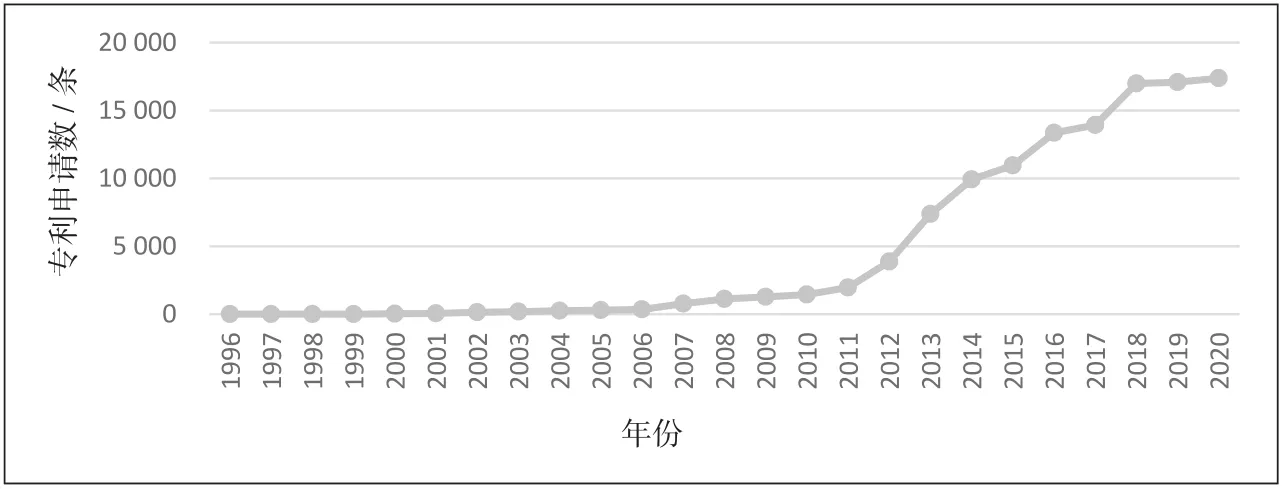
图4 1996—2020年全球智能物流产业专利变化趋势
3.2 智能物流产业融合发展模式分析
产业发展过程中的重要中介技术将不相邻的两节点相连,传递异质性资源,促进不同领域技术关联和融合。根据中介技术与上下游节点的技术领域属性关系,将中介技术资源传递行为划分为不同模式。以IPC4和产业部门节点,技术或产业领域间共现为联系,分别构建技术网络和产业网络,识别不同发展阶段的重要中介技术,进一步识别智能物流跨领域融合的模式。应用UCINET6.0软件,对1996—2020年4个阶段网络节点中间人得分进行排名,识别跨领域融合模式排名前十的重要中介技术节点,统计结果如表1所示。
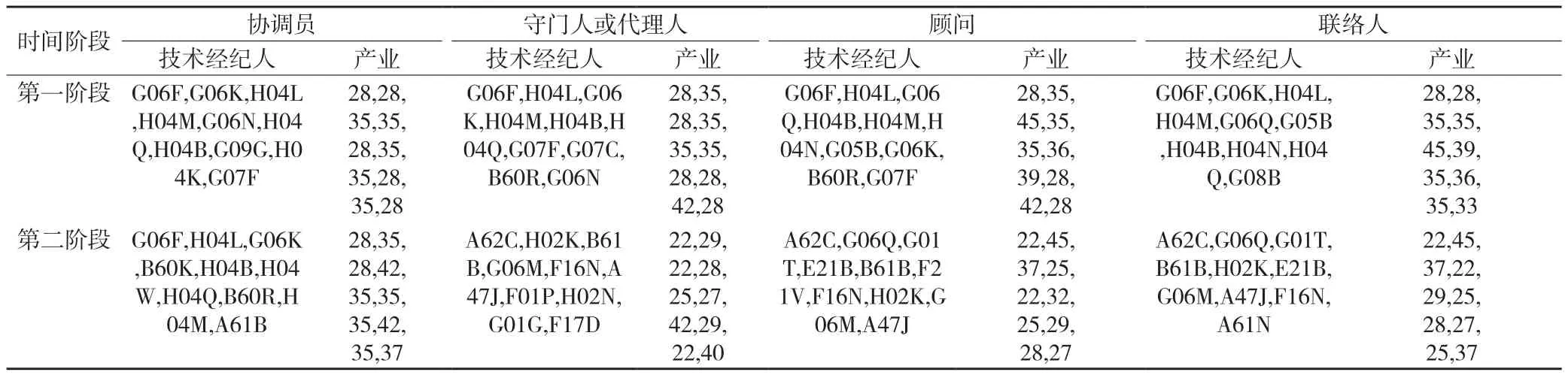
表1 1996—2020年各类模式下排名前十的智能物流重要中介技术
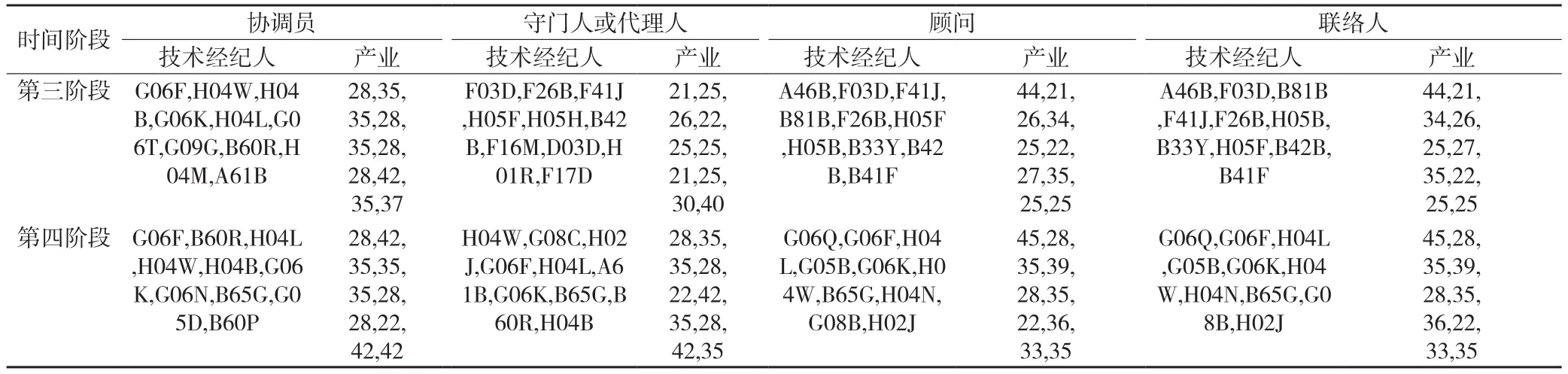
表1(续)
不同技术在跨领域融合中扮演不同角色,例如第一阶段,以“协调员”为代表的技术中间人有19个,G06F、G06K、H04L、G06N、H04Q、H04M、H04B、G09G、H04K、G07F得分较高;“守门人或 代 理 人” 中 有 G06F、H04L、G06K、H04M、H04B、H04Q、G07F、G07C、B60R、G06N;“顾问”有 G06F、H04L、G06Q、H04B、H04M、H04N、G05B、G06K、B60R、G07F扮演重要角色;“联络人”有 G06F、G06K、H04L、H04M、G06Q、G05B、H04B、H04N、H04Q、G08B。其他阶段分析同理。结合中间人角色分析方法,探究智能物流核心技术驱动跨领域融合特征,分析4个阶段各类跨领域融合模式的变化情况,具体如表2所示。
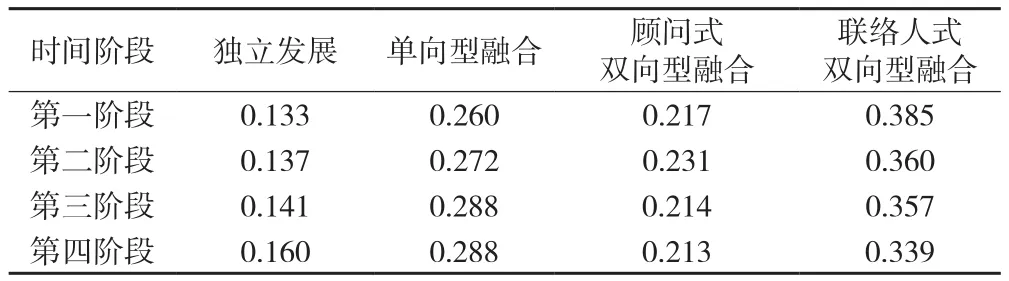
表2 1996—2020年各阶段智能物流跨领域融合模式演化情况
由表2横向对比发现,智能物流核心技术跨产业融合模式以联络人为代表的双向型融合模式为主,其次是以守门人或代理人式为代表的单向型融合模式,然后是顾问式双向融合模式,独立发展模式所占比例最低。由纵向对比可知,随着领域间融合发展,不同类型融合模式波动较小,总体呈现稳定的发展态势,表明智能物流在发展初期就受到了技术融合的深刻影响,不仅加速了智能物流产业自身的发展,同时对其他产业的发展也产生了深刻的影响。
技术层面网络演化如图5所示。具体来看,第一阶段,G06F、H04L、G06K等促进办公机械和计算机、信号传输,电信产业内部融合表现为模式独立发展模式;G06F驱动办公机械和计算机、信号传输,电信、机动车产业间的融合模式主要是单向型融合模式;G06Q、H04L等驱动信号传输,电信与办公机械和计算机产业的融合大多表现为顾问式双向融合模式;H04M驱动办公机械和计算机、信号传输,电信产业间的融合表现为联络人式双向融合模式。该阶段G06F、H04L、G06K和H04M跨领域融合产生了重要影响,主要与数字数据处理和数字信息传输技术相关。
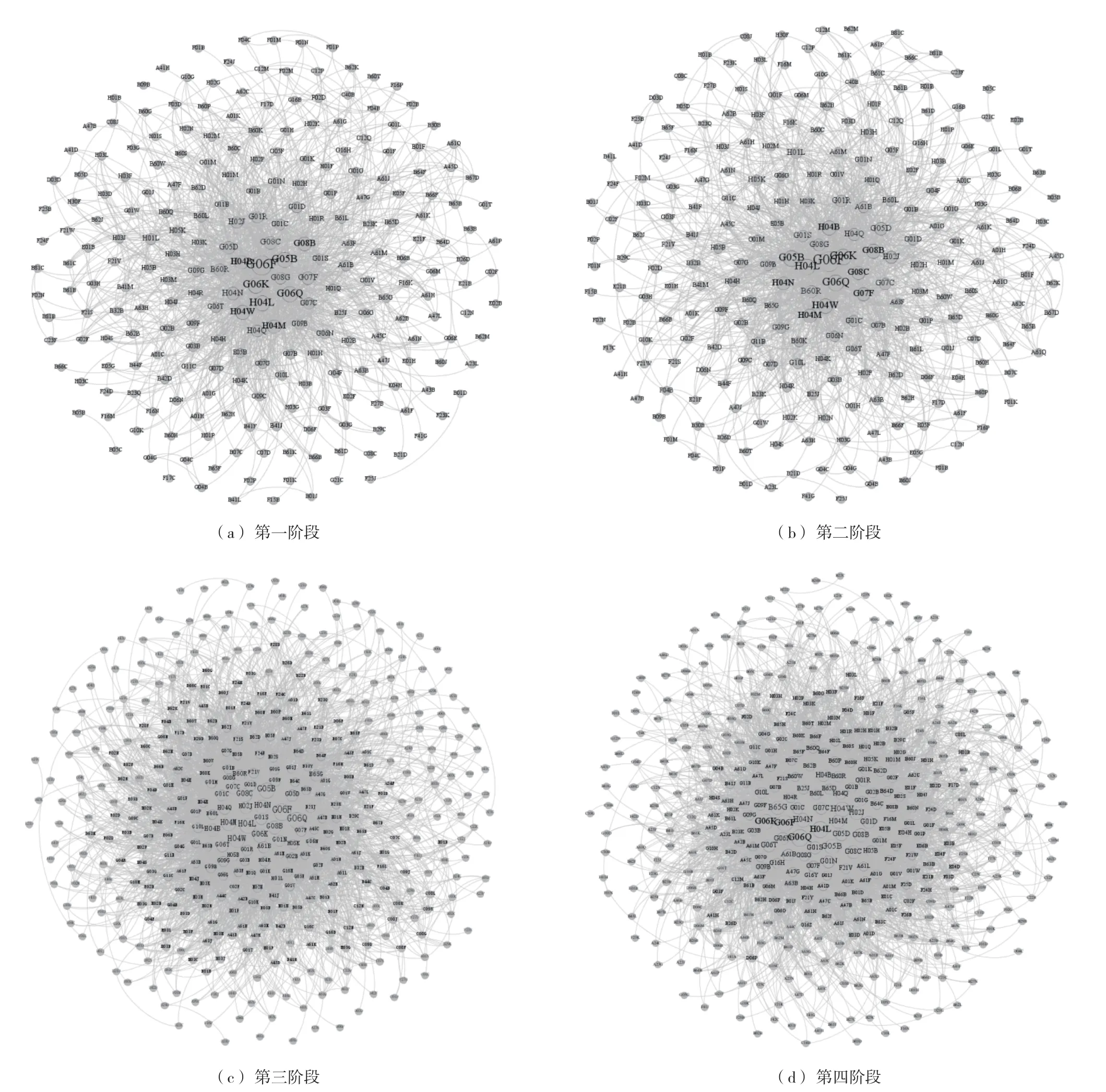
图5 不同时间阶段技术网络
第二阶段,G06F、H04L、G06K、B06K驱动办公机械和计算机、信号传输,电信、机动车跨产业融合的模式表现为独立发展模式。A62C、H02K、B61B驱动非专用机械、电动机,发电机,变压器产业融合模式多表现为单向型融合模式。A62C、G06Q、G01T驱动非专用机械、医疗设备、专用机械产业间融合模式表现为顾问式双向融合模式。A62C、G06Q、G01T驱动非专用机械、医疗设备产业间的融合表现为联络人式双向融合模式。
第三阶段,G06F和G06Q位于网络中心,G06F、H04W、H04B驱动办公机械和计算机、信号传输,电信跨产业融合的模式表现为独立发展模式。F03D、F26B、F41J驱动能源机械、专用机械、武器弹药运输产业融合模式多表现为单向型融合模式。A46B、F03D、F41J驱动家具,消费品、能源机械、武器弹药运输产业间融合模式表现为顾问式双向融合模式。A46B、F03D、B81B驱动家具,消费品、能源机械、电子元器件产业间的融合表现为联络人式双向融合模式。
第四阶段,G06F、G06Q、H04L、G06K、H04W等以顾问角色与领域外技术知识进行资源交换和有效互动,促进领域之间深度融合;H04L和H04W作为内部整合者扮演协调员角色,通过结合产业内技术知识促进产业内融合;而G06Q和H04L扮演联络人角色,增强两个以上产业部门相关的多产业融合。
产业层面网络演化如图6所示,第一阶段表现出大幅增长并积极参与技术关系的产业包括办公机械和计算机、其他电气设备、信号传输,电信、电视和广播接收器,视听电子产品、医疗设备、工业过程控制设备、机动车及其他产业。以下产业对之间联系较紧密,第一阶段包括信号传输、电信-办公机械和计算机,试听电子产品、电视和广播接收器-办公机械和计算机,办公机械和计算机-测量仪器,信号传输、电信-试听电子产品、电视和广播接收器,其他电子设备-办公机械和计算机,随着融合发展,第二、三、四阶段的产业网络中办公机械和计算机产业与信号传输、电信产业仍处于网络中心位置,产业对联系较为紧密,产业间连接强度随时间推移逐渐增强,其中测量仪器-信号传输、电信产业对连接强度上升显著。
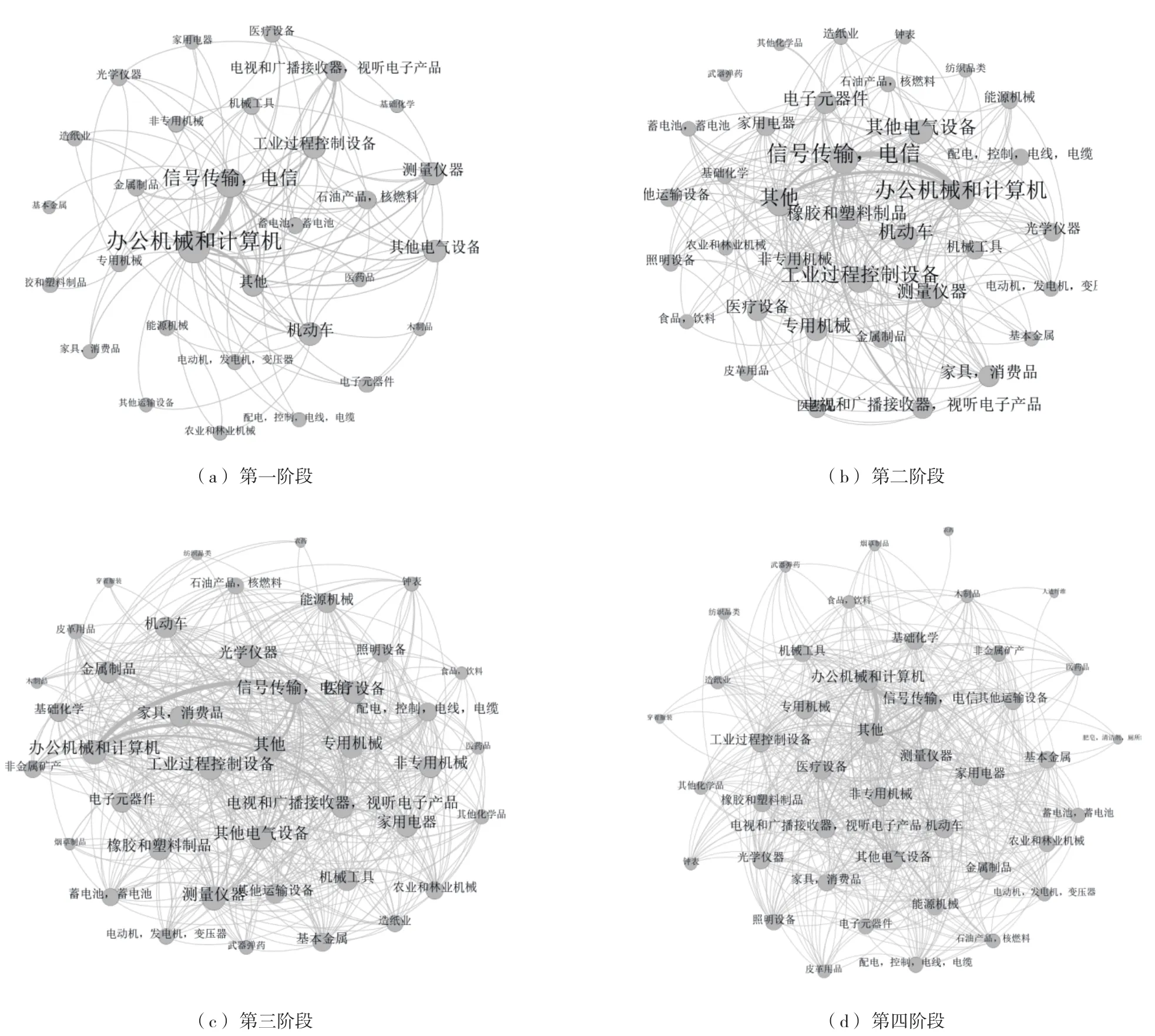
图6 不同时间阶段产业网络
3.3 预测结果分析
3.3.1 预测模型有效性检验
为保证预测结果的准确性和有效 性,在融合趋势预测前进行模型预测精确度及有效性检验,对1996—2020年间智能物流产业4个演化阶段,按照测试集与训练集1∶9抽取10%进行检验,检验结果如表3所示。
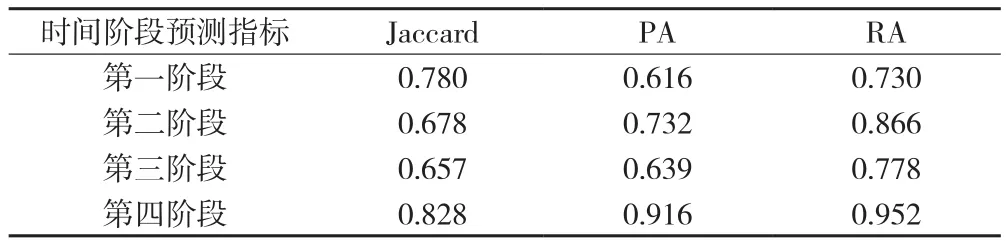
表3 链路预测算法精确度
由表3中可知,RA的AUC值总体高于Jaccard和PA,因此RA指标计算结果更为精确。从时间阶段来看,预测模型在2018—2020阶段表现最好,图7展示了该阶段Jaccard、PA和RA的ROC曲线,图中3个指标的AUC值均高于0.8,说明基于此阶段技术网络预测未来连接的可能性能够得到较为准确的预测结果。
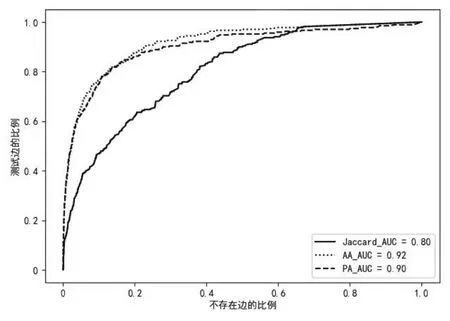
图7 2018—2020年网络预测精确度
3.3.2 智能物流跨领域融合趋势预测
将基于局部相似性链路预测 算法应用于技术网络,并将预测的技术网络映射到产业中。由上述步骤知,基于Jaccard、PA、RA指标的链路预测结果具有良好的准确性和可信度。因此,基于2018—2020阶段的专利技术网络,得到节点间相似性关系如表4所示,相似性越高表示技术间的融合关系强,链接在未来出现可能性较大。
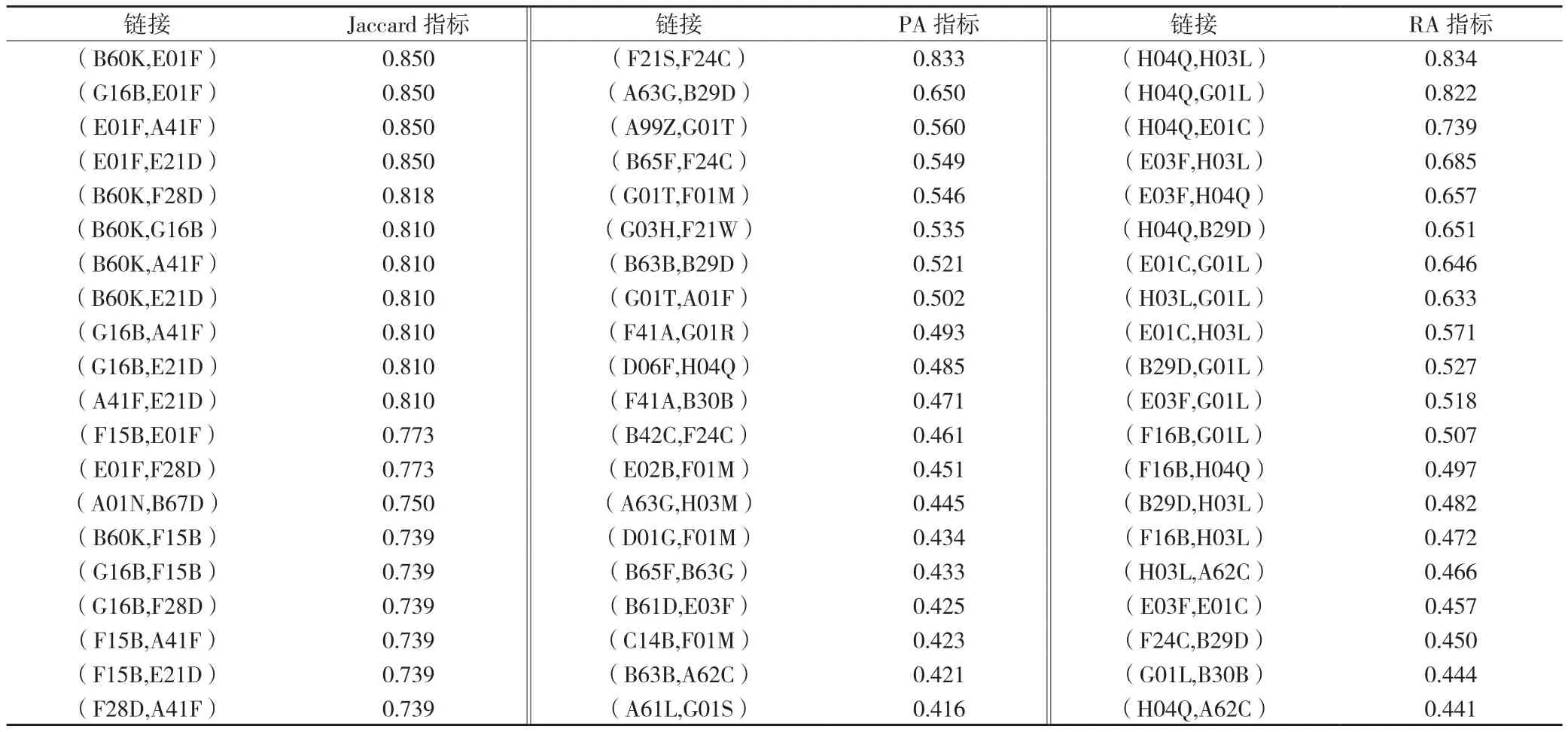
表4 跨领域融合预测结果
图8表示将基于Jaccard、PA、RA指标对未来技术关系预测结果可视化为3个不同的技术网络,并在此基础上,参照NACE-IPC4对应表,将链路预测模型对技术关系预测结果对应到产业领域中,构建未来跨领域融合趋势的网络,如图9所示。尽管在图8、图9中3个网络整体形状和结构形状不同,但整体特征基本一致。
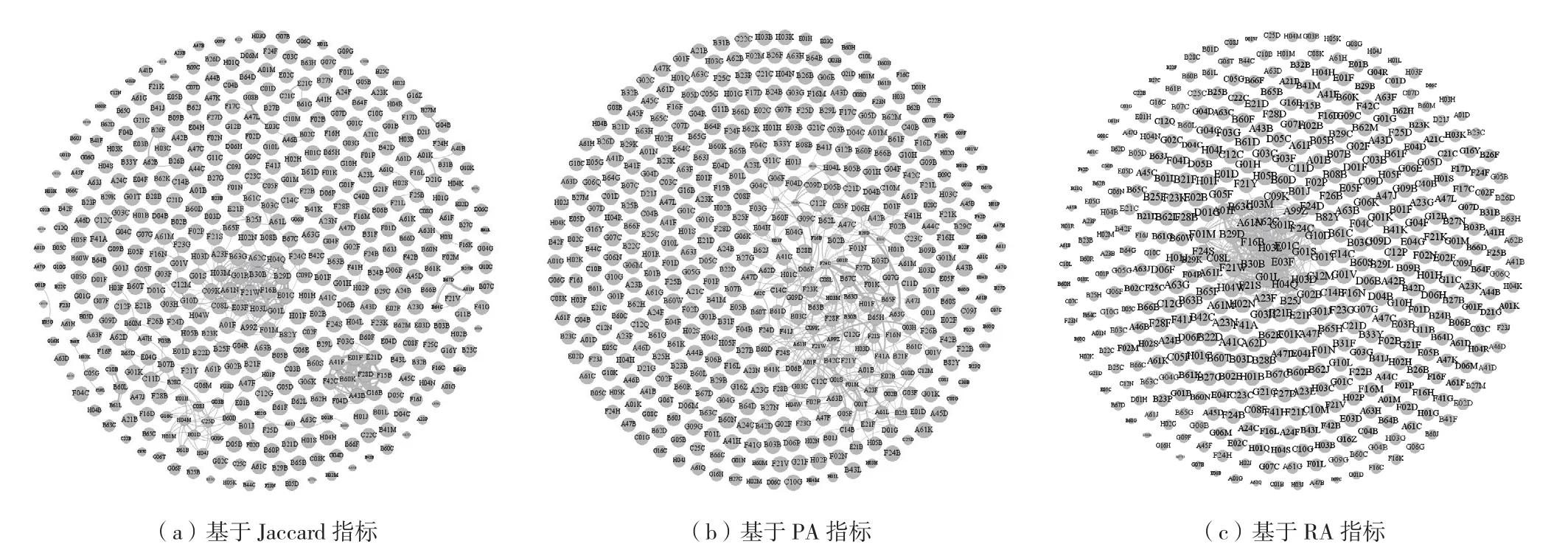
图8 基于Jaccard、PA、RA指标的IPC4共现网络预测结果

图9 基于Jaccard、PA、RA指标产业融合网络预测结果
结合表4、图8和图9发现,未来核心技术主要集中在G01L、G06T、H04Q、B60D、H0 3L、F16B、B29D等,上述专利技术在预测结果所构建的网络中表现出较高中间人得分,此类技术间的融合关系将可能是未来智能物流技术融合发展的主要方向。
由图9可知,专用机械、金属制品、信号传输,电信、其他运输设备、办公机械和计算机、机动车、家用电器等产业将蓬勃发展,与其他产业部门存在紧密联系,主要包括:专用机械-金属制品、专用机械-信号传输、专用机械-其他运输设备、专用机械-办公机械和计算机、专用机械-机动车、专用机械-家用电器。因此,未来这些产业之间的融合关系更紧密。
由预测模型知,G01L作为顾问驱动工业过程控制设备产业与办公机械和计算机、金属制品、照明设备产业间的融合,表现为顾问式双向型融模式;G06T作为协调人驱动办公机械和计算机产业的内部发展,因此办公机械和计算机表现为独立发展模式;H04Q拥有多重角色,既可以作为守门人或代理人驱动信号传输,驱动电信产业与家用电器产业的单向型融合,又可以作为顾问和联络人驱动信号传输,促进电信产业与办公机械和计算机、专用机械、工业过程控制设备产业间的双向型融合;B60D作为联络人驱动基本金属产业与工业过程控制设备产业间双向型融合;H03L作为驱动办公机械和计算机产业与信号传输,电信、工业过程控制设备、专用机械产业融合模式为联络人式双向型融合模式;B29D驱动橡胶和塑料制品产业与办公机械和计算机、家用电器、非专用机械、信号传输,电信产业融合模式为顾问式双向型融合模式。
4 结论
本文以智能物流产业1996—2020年专利数据为研究对象,分析跨领域融合模式并在此基础上进行融合趋势预测研究,主要创新点在于:(1)现有文献多以跨领域融合模式为主或以融合趋势预测为主,本文综合考虑跨领域融合的连贯性,丰富了跨领域融合相关研究,具有研究思维方面的创新。(2)本文聚焦新兴产业,以智能物流为例分析其跨产业融合的模式及趋势,丰富了智能物流产业相关研究。(3)运用精度较高的预测模型,为融合预测提供理论支撑,具有方法方面的创新。得出以下结论:
(1)不同类型的跨领域融合模式呈现稳定、微小波动的发展态势。联络人式双向型融合模式是主要融合方式,起始阶段即在融合中占据较高的比例,随着跨领域知识整合和产业部门间技术深度融合,以及技术间壁垒的限制,联络人式融合模式呈现逐步下降的趋势。单向式融合和顾问式双向型融合所占比例基本相同,且稳定较好,其中顾问式双向融合模式变化幅度小于0.01;单向型融合模式在起始阶段所占比例较低,在市场竞争优势的追求下,企业不断加深对自身核心技术的深度探索,使得同一领域内的技术有效结合,单向型融合模式比例逐步缓慢增大。
(2)跨领域融合的重要中介技术总体呈现动态演变的特征,部分技术则具有良好的产业基础和竞争优势。由四个时间阶段的融合模式演变以及不同融合模式下的中间人角色知,一二阶段的大部分技术在后期融合模式中的重要程度及作用方式发生转变,比如G01T仅在第 三阶段以联络人角色出现;G06K在一二阶段以参与独立发展模式为主,在第四阶段则以顾问身份参与双向融合过程,说明此类技术具有良好的技术潜力,在跨领域融合过程中实现创新突破的可能较大。而G06F始终参与独立发展模式,G06Q始终参与顾问式双向融合,表明G06F为创新主体拥有的核心技术,领域间融合的技术壁垒较高,适合进行深入R&D;G06Q更多以技术媒介的角色促进同一领域内技术的融合,创新主体应多关注与其关系紧密的其他领域技术。
(3)不同指标计算的相似性得分具有较大差异,基于Jacard指标的节点间相似性得分明显高于PA指标与RA指标计算得到的融合可能性。总体以B60K、G61B、A41F、F21S、H04Q为主的(B06K,E01F)、(G61B,A41F)、(F21S,F24C)、(H04Q,H03L)技术节点间呈现较高的相似性,在未来融合的可能较大,由技术与产业之间的一致性知,专用机械、金属制品、信号传输等将来未来蓬勃发展,与其他产业部门之间产生较为紧密的联系,例如专用机械-金属制品、专用机械-信号传输之间的融合是未来发展的主要趋势,创新主体可加强对此类技术的R&D投入和深入探索,积极建立与相应企业间的协作伙伴关系。
本文的研究结果为智能物流相关企业提供有益信息。在新一代信息技术深度融合、数字创新背景下,单一核心技术易受快速变化市场等外部环境的冲击,基于多方面资源的技术扩散吸收以及跨领域融合是捕捉市场机遇、获取竞争优势的有效途径。智能物流创新主体需明晰自身核心技术跨领域融合的主要方向,洞察技术跨领域融合趋势,适时调整及定制多元化发展战略,进行多领域的技术探索和开发。区分不同类型重要中间人角色的技术,有侧重地加大与相关领域技术的R&D强度,提升创造新产品的可能性和开发新技术的潜能,从而提升创新能力和竞争优势。
本研究也不可避免地存在局限性。(1)本文采用专利共现法仅从网络视角分析智能物流跨领域融合的模式及趋势,而企业创新发展是多维度融合的结果,技术融合同时也存在市场、服务等方面的融合,未来研究可综合考虑这几方面融合与技术层面融合的复杂联动。(2)智能物流技术跨领域融合是多层次的系统化过程,各模式遵循不同的融合机制,探索不同模式的实现路径是创新主体提升创新能力和竞争优势更为关键的途径,未来可综合研究不同模式下实现路径的联系与差异。
猜你喜欢
当代工人(2020年8期)2020-05-25
计算机世界(2020年50期)2020-01-15
青年生活(2019年23期)2019-09-10
物流技术与应用(2019年8期)2019-09-04
汽车观察(2018年12期)2018-12-26
消费导刊(2018年8期)2018-05-25
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
现代企业(2015年2期)2015-02-28
中共南宁市委党校学报(2015年4期)2015-02-28