
基于自平衡算法的移动机器人系统研究与设计
2023-04-24 16:32程楚锦王龙刘杰黄心怡刘天
客联 2023年12期
程楚锦 王龙 刘杰 黄心怡 刘天

摘 要:本文主要设计自平衡算法的移动机器人系统,该系统由电机、陀螺仪、加速度计和控制系统等组成,通过加速度计和陀螺仪等传感器获取车身姿态信息,并通过控制电机转速实现自行平衡。转向控制可以通过改变电机转速实现,速度控制可以通过PID控制实现。通过对实验结果分析,平衡效果达到预期目标。
关键词:自平衡;转速控制;螺仪
一、自平衡原理
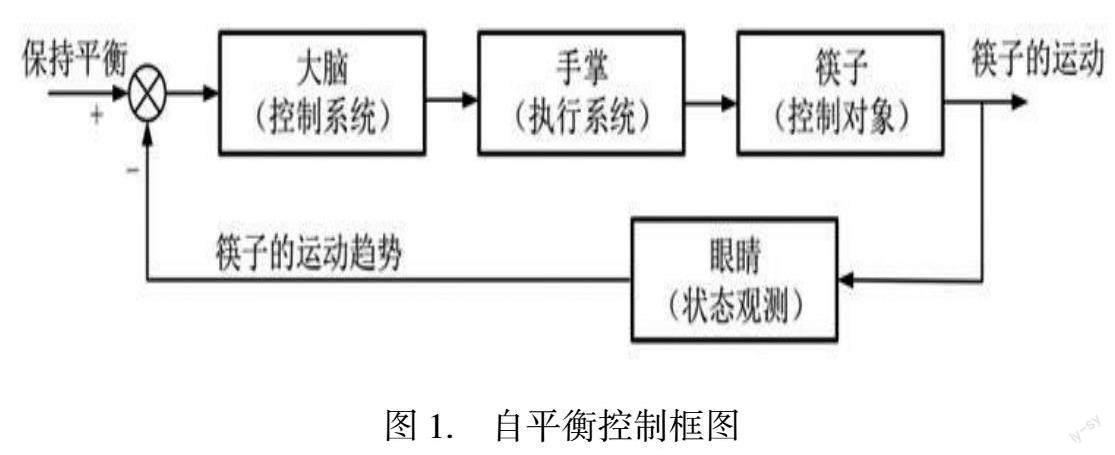
自平衡移动机器人的平衡控制原理,可以很直观地从生活经验中获取。例如在生活中,拿一根筷子竖着摆放在手掌中,为了保持筷子不倒,需要用眼睛時刻观察筷子的倾倒趋势,同时手掌顺着筷子倾倒的方向移动,手掌移动的速度需要跟随筷子倾倒的速度,这样才能保持筷子始终不倒。从中可以发现眼睛的观察和手掌的移动是两个必备的条件,这样便构成了具有负反馈机制的控制系统,如图1所示。
二、自平衡移动机器人系统动力学建模
基于飞轮平衡控原理搭建了一款单轮车机器人,根据其结构,设计出如图2所示的自平衡移动机器人,运用飞陀螺效应,采用两侧对称分布的结构形式将飞轮安装在样机上,通过双飞轮进行横滚方向和航向角度的控制,并将机器人整体看作倒立摆进行俯仰控制。
三、自平衡移动机器系统算法设计
自平衡移动机器人控制方法主要包括姿态控制、转向控制和速度控制。姿态控制是指通过加速度计和陀螺仪等传感器获取车身姿态信息,并通过控制电机转速实现自行平衡。转向控制可以通过改变电机转速实现,速度控制可以通过PID控制实现。此外,还可以通过机器学习等算法实现更加智能化的控制方法。常用的算法包括PID控制算法、卡尔曼滤波算法、神经网络算法等。
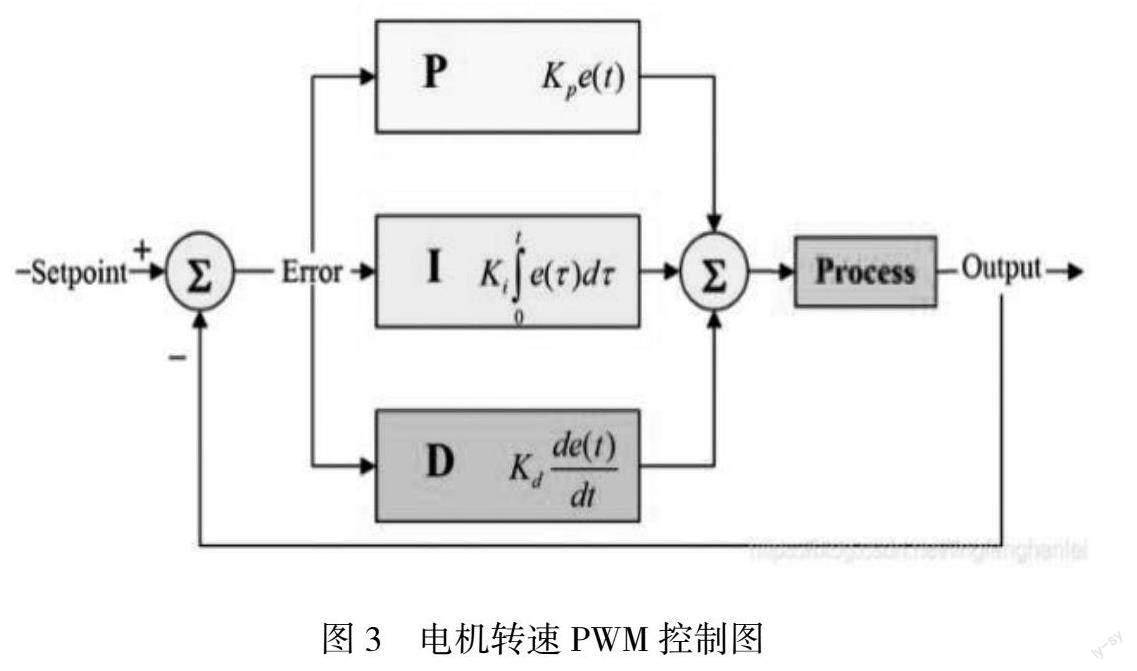
(一)PWM电机调速
先对电机调速以及电机正反转控制,是利用PWM技术,并根据需要改变占空比,从而达到来改变直流电机上电压的占空比,进而改变平均电压,控制电机的转速。如图3所示。
(二)姿态解算
陀螺仪和加速度数据的融合(MPU6050)当实现了电机调速之后,如何获取姿态信息,采用MPU6050测小倾斜的角度。mpu6050是一个加速度计和角速度计集成一体的六轴芯片。可以测出当前物体的加速度和角速度。然后融合得出当前姿态角,采用融合滤波的方法实现2种传感器的数据融合,以克服加速度计的动态误差和陀螺仪的漂移误差,即以加速度计获得的角度信息对陀螺仪输出信息进行校正,通过对比积分所得到的角度与加速度所得到的角度之间的偏差来改变陀螺仪的输出,从而使积分的角度逐步跟踪到加速度传感器所得到的角度。该方法利用加速度计所获得的角度信息与陀螺仪积分后的角度进行比较,将比较的误差信号经过比例系数1/Tg放大后与陀螺仪输出的角速度信号叠加然后进行积分。对于加速度计给定的角度,经过比例、积分环节之后产生的角度。数据滤波融合过程如图4所示:
【参考文献】
[1] 黄用华,王昌盛,何淑通,等. 双车把两轮车机器人同步摆把平衡控制研究[J]. 控制工程,2019,26( 7) : 1262-1269.
[2] 庄未,孙兵,李高明,等. 独轮车机器人原地定位的平衡控制分析[J].机械设计与研究,2018,34( 5) : 31-36.
课题项目:湖北汽车工业学院2023年度大学生创新创业训练计划项目“智能车度独轮组”(DC2023094)。
