
无人机巡检技术研究与应用
2023-05-29 09:24李宁
电子技术与软件工程 2023年7期
李宁
(广州南方卫星导航仪器有限公司 广东省广州市 510000)
随着无人机技术的飞速发展,它们在架空输电线路上的应用越来越广泛,发挥出了越来越大的作用。为了提升架空输电线路的运行效率和质量,以满足当今社会对安全可靠的要求,线路运检人员应该积极探索和利用无人机技术,以实现对日常巡检的有效监控,从而推动行业的可持续发展。随着科技的迅猛发展,无人机技术已经取得了巨大的成就,并被广泛应用于各种领域[1]。无人机的硬件和软件设备也日益完善,特别是在输电线路的检测方面,它们可以有效地克服传统检测方式的局限性,及时发现线路运行中的潜在危险,特别是在恶劣的天气状况和复杂的地形环境下,能够迅速收集现场信息,减少维护人员的损失,极大地提升了检测的效率。
1 巡检无人机系统要求
1.1 使用环境要求
无人机巡检系统应满足如下要求:
(1)起飞海拔高度:1000m ~3000m 符合GB/T20626.1 的规定;
(2)实用升限:3500m;
(3)工作温度:-15℃~+55℃;
(4)相对湿度:≤95%(+25℃);
(5)在极端的降雨(雪)天气中,飞机可以安全地短暂停留;
(6)防潮湿、防盐雾、防霉菌设计符合相关标准规定。
1.2 固定翼无人机性能要求
(1)有效载荷重量:≥1kg;
(2)最大续航时间:≥1h;
(3)最小作业真高:100m;
(4)巡航速度:≥70km/h;
(5)航程:≥70km;
(6)抗风性能最低要求:10m/s(距地面2m 以上,瞬时风速);
(7)飞行中水平位置控制精度:≤5m,飞行中垂直位置控制精度:≤10m;
(8)电磁兼容性符合GB/T17626.5 的规定;
(9)应能承受正常操作、发射、回收、飞行中所遇到的振动、冲击、加速度。
1.3 起降方式要求
(1)宜采用垂直方式起飞,可采用滑跑、弹射、车载等方式起飞。
(2)采用弹射方式起飞的固定翼无人机应能承受弹射时受到的冲击,弹射架应便于操作和运输,重量不宜过大。
(3)降落时应采用垂直方式,可以通过滑行、机腹擦地、伞降和撞网等方式实现。
(4)固定翼无人机在降落时,机腹擦地处应当采用耐磨材料,以确保任务载荷、测控通信设备(包括天线)、发动机、电池等关键零部件能够得到有效的保护,避免受到外力的直接冲击。
(5)固定翼无人机在伞降过程中,必须采取有效的防护措施,以确保任务载荷、测控通信设备(包括天线)、发动机、电池等关键部件免受外力的冲击。
(6)固定翼无人机在撞网降落时,机身结构应当采用后置螺旋桨,以确保任务载荷、测控通信设备(包括天线)、发动机、电池等关键零部件能够得到有效的保护和维护。
1.4 任务载荷性能要求
1.4.1 可见光相机性能要求
(1)有效像素:≥2400 万;
(2)当作业高度达到200m 时,成像质量可以准确识别航线两侧各100m 范围内的0.5m*0.5m 的静态目标,从而确保航行安全。
1.4.2 可见光摄像机性能要求
(1)有效像素:≥1280(H)×720(V);
(2)光学变焦倍数:≥10;
(3)当作业高度达到200m 时,能够准确地捕捉到航线垂直方向上两侧各100m 范围内的3m*3m 的静态目标,从而获得优质的影像。
1.4.3 红外热像仪性能要求
(1)分辨率:≥640(H)×480(V);
(2)热灵敏度:≤65mK;
(3)帧率:≥25fps;
(4)视频输出格式:PAL;
(5)空间分辨率:优于1.5mrad。
1.5 测控通信设备性能要求
(1)通视条件下,测控通信距离:≥20km;
(2)图像传输速率:≥2Mbps;
(3)误码率:≤10-6;
(4)通视条件下,测控通信响应时间,上行时延≤20ms,下行时延≤400ms。
1.6 地面站性能要求
(1)体积:≤500mm(L)×400mm(W)×250mm(H);
(2)重量:≤15kg;
(3)额定功率:≤80W;
(4)在额定功率下,电池供电的工作时间应该超过5h;
(5)在待机状态下,电池供电的运行时长应超过10h;
(6)整体防护等级:不低于IP64 符合GB/T4208的规定。
1.7 电磁兼容性要求
(1)根据GB/T17626.5 的要求,电磁兼容性设计必须满足500kV 及更高的交直流输电线路的100m 范围内的安全性和可靠性;
(2)为了保证电缆的安全性,建议使用双层屏蔽同轴电缆,并使用双绞线来传输控制信息;
(3)具有良好雷击浪涌抗扰度能力[1]。
1.8 可靠性要求
(1)可靠性工作的项目和要求符合相关标准规定;
(2)可靠性设计符合相关标准规定;
(3)飞行控制系统平均无故障时间:>150h;
(4)发动机平均无故障时间:>150h;
(5)发动机使用寿命:>1000h;
(6)动力电池充放电次数:≥300 次;
(7)由于其优异的导通性和稳定的连接,动力电池接头的外部绝缘强度也得到了显著提升;
(8)软件安全性措施方面应符合机载软件安全性相关规定。
1.9 操作性要求
(1)系统展开时间应小于20min;
(2)系统撤收时间应小于10min;
(3)为了避免混淆,电气连接必须清晰地标示;
(4)零部件更换应方便、快捷。
1.10 维修性要求
(1)为了确保工作效率,应该提供合适的工作区域和操作空间,以便于访问;
(2)应尽量采用标准件和模块化设计,提高设备、组件的互换性[2];
(3)应尽可能降低维修技能要求,除少数故障需要专业人员外,其它故障均可由用户完成维修;
(4)其它维修性要求符合相关标准规定。
2 巡检无人机系统构成
随着无人机技术的不断进步,能够完成复杂任务的无人机系统已经发展出了多个分支机构[2],其中包括:
(1)无人机由多个部件组成,包括机身、推进系统、操纵和维护设施。
(2)该任务设备包括:战斗监控、电子防御、通信中继、攻击指挥、电子侦查、核生化探测、战场测绘和靶标设备。
(3)通过无线电遥控/遥测技术、信息传输技术和中继转发技术,可以实现对测控和信息传输的全面管理。
(4)飞行控制与管理系统由多种功能组成,包括:实时的数据显示、地形图、航线轨迹、任务安排、记录、重现、情报分析、数据传输,还有各种数据传输和数据交换接口。
(5)发射与回收系统由多个部件组成,其中包括发射车、发射箱、助推器、起落架、回收伞、拦阻网等,这些部件的协同工作使得发射与降落的过程能够顺利进行。
(6)维修系统包括基层级和基地级,旨在保障设备的正常运行。
无人机系统是一种用于执行特定任务的机器,它能够通过遥控和遥测技术来接收信息并将其传送到目标地点[3]。
3 无人机自主巡检技术应用
3.1 反无人机GPS欺骗技术
目前应对无人机的最常见手段包括:利用雷达、无线电频谱探测器、光学设备、干扰机以及GPS 等设备[3],来实现有效的监控、检测、攻击、干扰以及欺骗等,如图1 所示。但是目前普遍存在的问题在于:
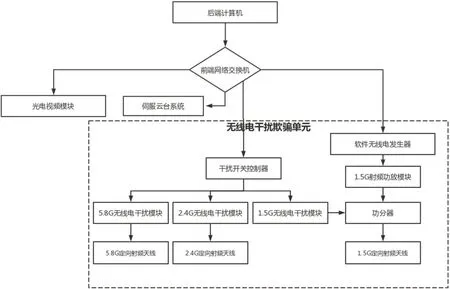
图1:无人机GPS 欺骗诱捕方法与流程
(1)无人机飞控系统已经逐渐引入反GPS 欺骗算法,GPS 诱骗难度逐渐增高[4];
(2)对无人机飞手定难、抓捕难的问题始终没有解决。
3.2 图像预处理技术
(1)图像预处理:对无人机倾斜摄影获取的图像进行切分、去噪、纠正等预处理操作,提高后续处理的准确度和效率[5]。
(2)特征点提取:利用计算机视觉算法提取出每张图像中的特征点,并对其进行匹配,以实现三维建模。
(3)点云处理:将无人机倾斜摄影获取的数据转换成点云格式,对点云数据进行滤波、去除噪点、采样、配准、重建等处理操作。
(4)模型生成:利用点云数据生成三维建模模型,可采用多种方法,如多视图立体匹配、三角网格生成、体素填充等。
(5)后处理:对生成的三维模型进行后处理,包括纹理映射、网格优化、贴图等操作,以提高模型质量和视觉效果。
(6)分析与应用:根据需求对三维模型进行分析和应用,如计算体积、提取特征、导入到GIS 系统中等。
3.3 无人机航迹规划技术
通过对任务目标的精确定位和优化,航迹规划可以为无人机提供一个完美的、符合约束条件的飞行路径,这也是其最重要的组成部分[6]。采用GPS/INS 组合导航系统,无人机可以有效地规划出最优的飞行路线,从而减少地图误差和随机环境的干扰,同时还能够实现自主调整,有效地防止遭遇敌对目标,从而确保安全地完成指定的任务[7]。通过分析周围的环境因素,如风场、敌方雷达扫描范围、导弹高炮打击威胁区以及地形,可以制定出最佳的无人机航迹规划方案,这需要考虑到多种因素,如飞行器的约束条件、航迹规划器和自动驾驶仪。
3.4 数据安全防护技术
3.4.1 载荷安全防护
通过采取软件检测方法,能够有效地识别出无人机系统的载荷,从而确保其完整性、可靠性,并且采取相应的措施,如加强惯性传感器和GPS 传感器的防护[8],从而提高无人机的安全性。
通过调整控制常量,能够更准确地了解无人机的运动规律,因为它们受到无人机的物理特征的影响,包括重量、轴心距、底层控制算法、惯性和重力。如果无人机的航迹超出了其规定的范围[9],那么可以断定它遭遇了欺诈性的攻击。由于无人机载荷众多,IMU 和GPS传感器容易受到欺骗攻击,因此,研究和开发有效的防护技术显得尤为重要,以确保无人机的安全性和可靠性。随着新一代攻击手段的不断涌现,光流、雷达、ADS-B等载荷也面临着更大的威胁,因此,开发有效的防护技术,以确保载荷的安全性,已经成为当今研究领域的一个重要课题。
3.4.2 软件安全防护
在工业控制领域,漏洞检测通常采用灰盒技术或黑匣子技术。通过灰盒方法,可以在充分理解目标的基础上,进行二进制插桩、动态污染源检测、漏洞检测以及其他相关技术;通过使用黑盒技术,可以在没有充分信息的情况下进行漏洞检查,这是一种常见的模糊测试技术。无人机系统的漏洞检测和防御技术类似于工业生产,一般会使用黑匣子或灰匣子的方法,这些方法包括控制流完整性、模糊测试(Fuzzing)、内存隔离等,旨在提高系统的安全性和可靠性。
3.5 霍夫变换效果
霍夫变换可以用来精确地描述和预测断点的边缘特征。该方法利用将二维图像从原始状态转换为参考状态,从而实现对直线和曲线的有效拟合。如Hough 所述,图像空间x-y 中,斜率为a,在y 轴截距为b 的直线方程为:y=ax+b。
3.6 智能优化路径规划算法
3.6.1 启发式寻优搜索
启发式搜索可以帮助更快地找到目标,它可以通过评估状态空间中的搜索结果,找出最优解,并且可以节省搜索时间,提高效率就是其中之一。
3.6.2 遗传算法
遗传算法(GA)被广泛应用于解决复杂问题,它以其高效率和稳健的特点而闻名。这种算法利用染色体的重组、转录和变异来创建一系列新的基因组,然后根据这些基因组的表现来评估它们的性能,以达到最佳的结果。
3.7 神经网络方法
Hopfield 网络借鉴“能量函数”的理念,通过采用特殊的非线性动态结构,使得它能够在达到稳定状态时,将能量降至最低,从而有效地解决优化等技术难题。可以将地形信息转化为可用于航迹规划的参数,并利用扩展的Hopfield 模型和无人机约束条件来实现安全和合理的航迹规划。这种方法可以帮助更好地跟踪和避开地形,从而提高航行效率[10]。
4 结语
随着技术的发展,越来越多的电力企业正在采用无人机来完成架空输电线路的巡检,而不再依赖传统的手工操作,从而实现智能化的飞行。在探索线路的过程中,为了达成最佳效果,必须先让无人机飞至指定的高度,并且根据实际情况精确地调节拍摄角度。海量数据处理、巡检缺陷图像自动识别等前沿技术的不断进步,无人机巡检的应用将得到极大的提升,从而有效地解决实际生产中的问题,确保输电线路的安全可靠运行。
猜你喜欢
水上消防(2022年2期)2022-07-22
青年歌声(2019年12期)2019-12-17
电子测试(2018年22期)2018-12-19
北京航空航天大学学报(2017年7期)2017-11-24
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年6期)2016-11-16
太空探索(2016年12期)2016-07-18
舰船科学技术(2015年8期)2015-02-27
电子设计工程(2015年3期)2015-02-27
