
基于光线追迹法的单椎管X光器件的模拟及验证
2023-05-29 09:24彭诗棋林欣茹彭子恒
电子技术与软件工程 2023年7期
彭诗棋 林欣茹 彭子恒
(中国核动力研究设计院 四川省成都市 610213)
自伦琴发现X 射线以来,它已逐步在许多领域有了越来越多的应用,X 射线光学的飞速发展也催生了一个重要的门类——导管X 光学[1,2,3,4]。随着研究领域的不断拓展、各领域研究的不断深入以及研究者们对数据精度要求的不断提高,实践对导管X 光器件的性能也有了越来越高的要求。导管X 光学领域也逐渐发展出了更复杂、更具有针对性的各种新型器件来。通过对X 射线在不同形状、不同曲率的导管中的传输规律的研究,来研究各类导管X 光器件对X 光的传输特性,进而引导器件的设计理念和制造工艺的改进,越来越成为导管X光学领域研究的一个重要方向[5,6]。
对毛细管X 光透镜的光线追踪的模拟计算,可以优化、指导毛线管X 光透镜的设计与研制,具有很重要的实践意义。
1 数学模型的建立
1.1 椎管的几何描述与光线追迹过程
相较于透镜而言,椎管的几何特性不难描述,由于它的内管壁是圆锥曲面中的一段,因此只需要将该圆锥曲面的表达形式求解出来就可以了。如图1 建立坐标系,设光源到椎管入口处的距离为D,椎管长度为L,椎管入口半径为R1,出口半径为R2。
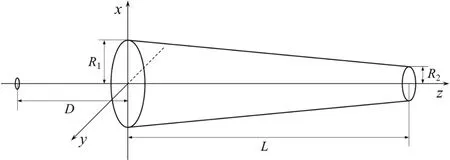
图1:椎管坐标系的建立
易知在任意z处管内壁的表达式为:
在该处管壁的单位外法矢量为:
其中:mx=2x,my=2y,
再从光源和椎管入口截面上各随机取一点,确定出入射光线的方向向量及入射光线所在直线的方程,将该方程与式(2)联立,可得一个关于z的一元二次方程,直接求解便可得到光线所在直线与椎管管壁的交点。再求出反射光线向量,迭代循环。
1.2 传输效率及光强分布
在光源的范围内及子管入口的范围内分别随机取N个点,确定出N条随机的入射光线,每条光线的权重为1,将上述追迹过程重复N次,则进入弯管的总光强I0=N。
出射光光强分为两个部分,直射光I1与反射光I2,I1与I2可表示为:
其中N1是直射光线的条数,N2是反射光线的条数,M是某条光线的反射次数,Rm(θm)是该条光线在子管管壁上发生第m 次反射时的反射系数。X射线在子管中的传输效率为出射光强与入射光强之比。
要模拟光斑形貌,就必须知道每一条出射光线打在接收屏上的具体位置。根据光线追迹法,求解出每一条光线的传输路径,并且根据全反射条件,判断它是否会在传播过程中被管壁吸收,最终是否能从子管末端出射,被接收屏捕获。记光线从子管出射前,在管内最后一次反射时,反射光的方向向量为,路径起点为(xsn,ysn,zsn),接收屏距子管出口端的距离为f,可以求得光线打在屏上的位置坐标为:
为了直观上获知椎管的焦距大小,本文模拟了椎管轴向(即z轴方向)上的光强分布。为能够直观地看到光强沿轴向的分布,就必须将光强分布的图像显示在显示屏上。为此,把椎管及椎管外一部分空间所在的平面划分成1313×153 个区域,设这个平面的左顶角坐标为(pl,maxp),右底角为(pr,minp)。并在Delphi 7 中建立一个1313×153 的图像框来图像显示每个区域中光想强度的大小。为了获知每一个像素点的颜色深浅,还必须生成一个1313×153 的矩阵来控制。该矩阵记录了每个区域内所通过的光路的条数。
光线在管内传播时,其路径是由大量的线段组成,这些线段的起点是光线上一次反射的反射点,终点是光线下一次反射的反射点。先将其中某一段线段单独提出来研究。假设该段线段的起点坐标是(xs,ys,zs),终点坐标为(xc,yc,zc),将该线段投影在zox平面上(如图2所示)。
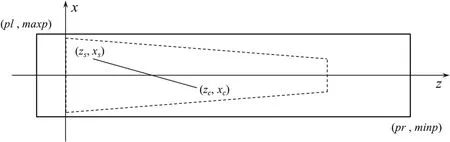
图2:椎管轴向光强分布求解示意图
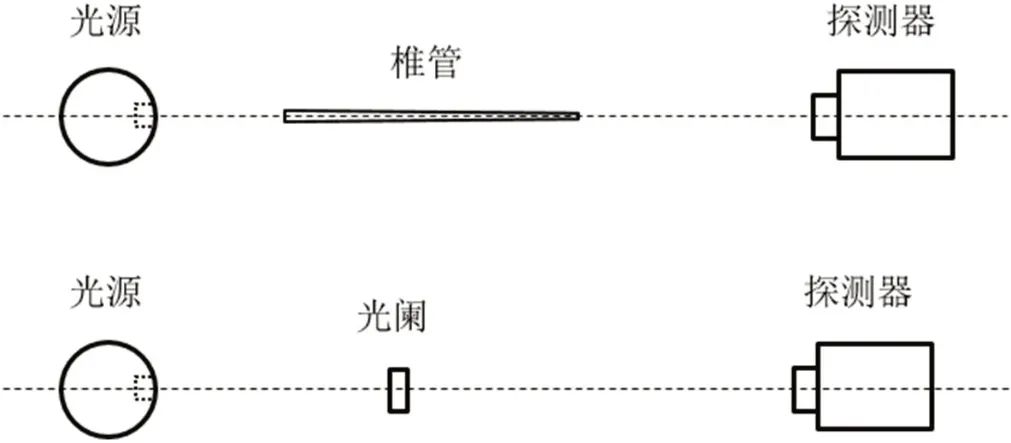
图3:椎管传输效率测量的实验装置示意图
起点所在区域所对应的像素点为(pix_zs,pix_xs)(pix_zs和pix_xs都是整数),由几何关系可知:
同理,终点所在区域对应的像素点(pix_zc,pix_xc)(pix_zs和pix_xs也都是整数)也可求得。
3.1 佛山各区儿童行为问题检出率无差异 本次调查的1 695名佛山市儿童,行为问题检出率为11.8%,与国内外报告基本一致,比深圳的儿童问题检出率13.97%稍低[3],国外儿童问题发生率5%~15%,全国4~16岁儿童少年行为问题检出率10.78%~15.16%[2]。
除了这两个区域外,起点与终点连线间的所有区域,该线段都会经过,所以这些区域所对应的像素点都必须找出。在显示屏上,这段光路所对应的线段的斜率为:
所有位于(pix_zs,pix_zc)区间的pix_z,都有一个对应的pix_x,使得该像素点位于光路对应的线段上,也就是说所有满足条件的像素点所对应的数据存储矩阵中的元素项,值都加1。
这样追踪完N条光线的轨迹之后会得到一个数据存储矩阵,该矩阵上的每个元素的值都对应平面上相应区域的光强。将其显示在显示屏上的图像框中,就可以很直观地看到沿轴向光强的分布情况。而在轴向光强分布图中,光强最强的部分,就是焦点的位置。
2 模拟结果与实验结果的比较
2.1 传输效率的实验方案
测量椎管传输效率的装置如图2 所示,首先调节椎管准直,使椎管的计数达到最大,记录下此时的计数N1;将椎管移除,再在光源和探测器间放置一光阑,再次调节使探测器计数达到最大,记此时的计数为N2。可以推导出椎管的传输效率为:
其中,S1为椎管入口的面积,S2为光阑通光的面积,D1为椎管入口处距光源的距离,D2为光阑距光源的距离。
2.2 椎管的传输效率
为了验证模拟的准确性,将模拟结果与滕玥鹏等[8]所得的实验结果相对比。滕玥鹏等对一根长12cm 的椎管进行了实验。该椎管入口端内径60μm,出口端内径30μm。实验使用Cu靶(X射线能量为8.04keV)微焦斑(焦斑直径为50μm)光源。实验测得该椎管的传输效率为13.86%。在相同条件下,该根椎管的传输效率模拟结果为14.32%。可以看出实验结果与模拟结果符合得很好。
2.3 焦距与焦深测量的实验方案
测量椎管焦距的实验装置如图4 所示,将光源、椎管、刀口及探测器按如图的顺序安放,调节准直后。从定义上可知,焦距即为光斑最小的点到椎管出口端的距离。测量焦斑大小的方法采用刀口扫描,将刀口放置于椎管出口与探测器间的某一位置处,调节刀口高度,使其刚好完全遮住椎管末端出射的光,此时探测器计数为0;然后按一定步长向下调节刀口,依次记录每移动一步探测器的计数;将所得数据绘制在曲线图中,可得此处光强的积分曲线,再由积分曲线得到光强的微分曲线,微分曲线的半高宽即为光斑大小。再将刀口位置移动至椎管末端与探测器间的其他位置,不断重复上述步骤,直到找出焦斑最小的位置为止,此时刀口距椎管末端的距离即为椎管的焦距。

图4:椎管焦距测量的实验装置示意图
2.4 焦距与焦深
滕玥鹏等还对出口端的束斑大小进行了实验测量。实验在距出口端2.5mm 处开始测量,以0.5mm 为步长,测量了一组数据。实验结果表明,光束经该椎管传输之后在距椎管出口端25.mm 外呈发散状。具体实验结果见图5。
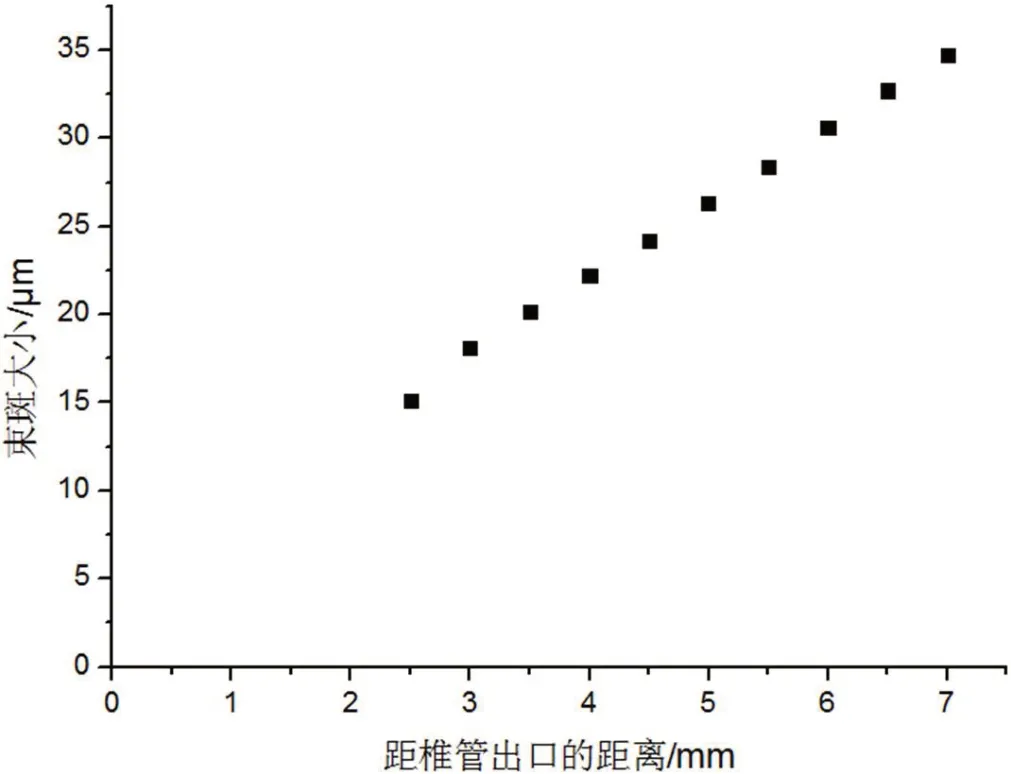
图5:束斑大小随椎管距出口的距离的变化

图6:光强在文献中椎管的光线传播方向上分布情况示意图
在同样的条件下,模拟得到的光强在光线传播路方向的分布情况。在椎管出口端的光线也成发散状(见:6)。模拟结果与实验结果吻合较好。
上述文献中所使用的椎管在出口端光线近乎发散状,且文献中未确切告知该椎管焦距的具体值。为了进一步验证程序对椎管轴向上光强分布的模拟的准确性,文章对一个椎管进行了实验。椎管入口端内径为630μm,出口端内径为620μm,管长120mm。实验使用实验室Cu 靶微焦斑光源,X 射线能量8.04keV,光源距椎管入口端距离为29mm。实验测得椎管出口端焦距为20mm。在相同条件下进行模。光束在距出口端20mm前后有明显的汇聚。模拟结果与实验结果吻合较好,这说明模拟的准确性较好,模拟结果的可信度较高。
3 小结
本文利用光线追迹法建立了椎管的数学模型,并模拟了光线在椎管中的传播,得到光线在椎管中传播的传输效率、椎管出口端的光斑形貌以及在光线传播方形上光强的分布。模拟结果与是研究过吻合较好,说明了模型建立的合理性与模拟的可靠性。
猜你喜欢
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
上海大学学报(自然科学版)(2018年5期)2018-11-02
牡丹(2018年31期)2018-01-03
自动化学报(2017年11期)2017-04-04
中国卫生标准管理(2015年25期)2016-01-14
中国卫生标准管理(2015年6期)2016-01-14
山东工业技术(2015年18期)2015-07-16
物理实验(2015年9期)2015-02-28
