
RAC定位技术在露天有轨运输中的应用研究
2023-05-29 09:24邓祖建
电子技术与软件工程 2023年7期
邓祖建
(首钢集团有限公司矿业公司计控检验中心(北京速力科技有限公司) 北京市 100043)
1 项目背景
近年来,随着国家“公转铁”政策落地及首钢矿业公司资源再利用产能的提升,运输部运量呈大幅增长趋势。同时,矿业公司已明确了铁路运输产业作为公司第三次大发展的支柱产业之一。新形势下,运输部亟需尽快完成由劳动密集型向技术密集型的产业转型,为全域提速提效提供支撑,从而适应高运量、快节奏的铁路运输生产需要。同时,通过搭建智能运输体系,促进人力资源结构的优化,为确保“增量不增人”创造条件。
国内各冶金企业铁路运输部门均已实施或正在实施智能调度、机车定位监控等信息平台,且取得了较好成效。在此基础上对“运输一张图调度管理系统”建设的技术可行性进行了评估,认为以“机车动态跟踪+智能调度管控”为核心功能的智能运输一期解决方案已具备实施条件。该项目实施后,将为构建智能运输体系奠定坚实的基础,具备较好的经济效益和社会效益。
2 现状分析
矿业公司运输部现有46 台机车(内燃机车25 台,其中:DF4DD 型8 台,GK1 型17 台;电机车21 台),15 个车站、230 公里铁路线、450 组道岔、线路南北距离约30 公里。
目前,运输部各机车均已安装含GPS 功能的视频监控系统,可对机车运行情况进行实时跟踪及轨迹回溯。但数据访问仅能基于互联网实现,且机车无法精确定位至准确股道。机车调度指令的下发通过对讲机实现,部分社会道口和厂内道口视频已传输至调度室,但机车司机不能及时了解路口状况。机车端与地面端的信息平台处于信息不互通的状态,未能实现“车地人”有效联动。
运输部一张图调度系统的上线能够极大的发挥运输系统的潜能,合理调度车辆、优化业务流程、减小岗位劳动强度、提高机车运行安全、优化人力资源,为运输部“增量不增人”提供支撑,也为全面构建智能运输体系夯实基础。
3 需求分析与技术创新点
3.1 需求分析
机车调度人员的主要职责是负责矿区全段机车运行,集中统一指挥;负责接收货运计划,及时下达到相关派班室,合理安排机车供应,并组织兑现,编制实际机车周转图。实时掌握机车所在位置、运行任务及所处状态。掌握机车运用、整备、检修动态,及时变更机车工作种别,按检修计划及时扣车等。长期以来机车调度人员都是通过轨道电路来判断机车所在的区段,无法精确确定机车所在位置,在站场内更是不能确定某辆机车所处的具体股道,都靠及时联系及调度人员个人能力去硬记,要掌握的信息也比较多且杂,造成人员工作强度高,效率低,并且对调度人员的素质要求都相对较高。在面对高运量、快节奏的生产形势下,生产组织各环节的不适性日益突出,总结起来主要表现在以下几个方面:
(1)人不够用,尤其是乘务员、调车员等一线岗位结构性缺员问题突出;
(2)车不够用,造成机车、车辆不能及时回房整备;
(3)线路不够用,站场满线状态时有发生;
(4)调度岗位脑子不够用,随着机车使用台数的增加,完全凭岗位经验、靠个人能力,不能保证调度指令的科学高效。
现代化的铁路运输组织要求调度指挥人员能及时掌控全局动态信息,并与现场岗位形成有效联动,从而确保调度计划制定的科学性、下达的及时性、执行的高效性。基于此现状且在发展铁路运输产业的关键时期,搭建一套机车车地联控系统是必要的,也是迫切的。
在建设该项目前,机车上原有一套视频监控系统带GPS 定位功能,定位精度在正负10 米左右,只能掌握机车大体位置,无法精确定位到股道上,车地人无法有效联动,无法满足现有生产需求。根据以上现状及需求分析,设计了一张图调度系统的相关功能,实现统一调度、协调指挥的管理目标。
一张图调度主系统包括机车信息采集交互系统及调度中心。机车信息采集交互系统实现机车的精确位置、速度、设备状况、能源消耗等信息采集,实现机车与调度中心、道口数据交互。运输部调度中心与四个管控区域通过电子地图实时显示所有机车的位置、速度、状况、车辆配置、物流等信息,站场的股道占用、道岔位置、信号、闭塞等信息,线路的信号信息,道口的信号状态等信息,集成显示物流信息系统、微机联锁系统相关信息,实现辅助调度指挥的管理目标。
3.2 技术创新点
通过对现状及需求的多次分析,结合现在的技术手段,确定了一张图调度系统设计方案。结合机车所处的运行环境、行驶范围及投资成本,确定通讯不采用自建基站的方式,而是采用公网4G 传输方案,减少投资成本及工程建设周期。机车精确定位也不再选用传统的建立差分基准站RTK 方式,而是采用新型的卫星定位技术—RAC 卫星高精度定位技术方案。机车上安装智能终端主要功能目标是:
(1)机车精准定位(精度20-60 厘米)、速度采集上传;
(2)机车设备状况、能源消耗采集上传;
(3)机车视频集成显示、存储、上传;
(4)接收显示调度中心信息(站场信息、物流信息、作业任务等);
(5)行车电子地图显示;
(6)行车安全提示(防追尾及超速报警等功能)。
机车信息采集交互系统包括:机车控制单元、行车电脑、RAC 定位模块、RFID 定位模块、交换机、4G通讯模块、视频模块等。
机车精准定位,要求定位精度在60 厘米以下,因为股道宽度为1435mm 的称标准轨距,现有铁路双线区间,两正线中心线间的最小距离为4000mm;车站内相邻两股到发线中心线间最小距离规定为5000mm。按现在定位技术主推RTK 差分定位技术,在RTK 差分技术上分二种实现方式,一种是自建RTK 差分基站,首次投入高,日后维护保养。另一种是网络RTK 方式,由专门的运营商提供差分数据终端通过网络接收,然后在终端方进行数据差分,实现高精定位,定位精度能达到厘米级内。然而此次我们经过多方咨询、考察、测试后,确定采用新的高精度定位技术——RAC 高精度卫星定位技术。
此新型的RAC 高精度卫星定位接收机,其特点是不使用RTK 差分技术,仅采用普通民用单频信号(GPS L1 或北斗B1),就能实现绝对定位优于亚米/分米级,相对动态定位厘米级的定位精度。实时阵列校准RAC 定位技术是一种创新性的提高GNSS 定位精度的技术,与RTK、RTX 等传统技术路线共存。RAC 技术通过创新的天线阵列设计方案和软件算法,使得水平定位精度误差大大降低,较大的提高了定位的精度和稳定性。并且RAC 技术方案不需要建立基准站,减少固定投资及日常维护,同时终端选择上也不需要与之匹配的卫星定位芯片来为差分数据服务,终端设备的选择更自由,开放。
4 系统设计
4.1 系统总体功能设计
如图1 所示,系统由机车控制单元、行车电脑、RAC 定位模块、RFID 定位模块、交换机、4G 通讯模块、视频模块组成。
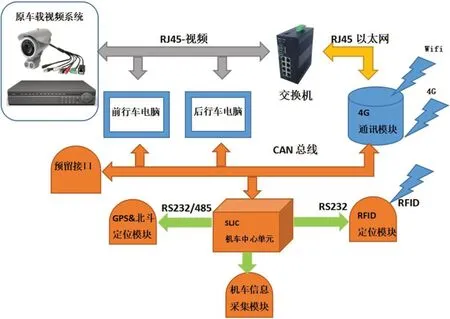
图1:系统组成
系统利用RAC 定位模块获得高精定位信息并与车载RFID 定位模块相结合计算出准确的机车位置,传送给中心控制单元;机车信息采集模块负责将机车设备状况、能源消耗等运行信息传送给中心控制单元;中心控制单元通过4G 通讯模块实现与调度中心信息交互,上位系统通过无人机高清正射影像飞行得到的底图,把机车定位坐标投影于底图之上。最终将机车的实际位置展示出来。
车载视频系统通过行车电脑直接显示车载视频信息,同时通过交换机及4G 通讯模块将视频信息传到调度中心;道口状态、信号、视频信息通过4G 通讯模块采集上机车,并通过行车电脑显示。
调度中心的调度信息、物流信息、道路信息通过4G 通讯模块传到行车电脑显示。
4.2 RAC高精定位接收模块
此次采用的高精定位接收机型号为RAC-F1,是一款类 G-MOUSE 卫星接收器,内置卫星接收天线,具有全方位高精度定位功能,采用RAC 定位技术,定位精度可以达到静态小于60cm,动态小于 20cm;能满足机车区分所在股道的使用需要。
什么是RAC 技术,所谓RAC 即Realtime Array Calibration(实时阵列校准)一种新型的高精度卫星定位接收机,其特点是在不使用任何差分技术、惯性导航、及任何辅助技术,仅仅采用普通民用单频信号(GPS L1或北斗B1),就能实现优于1 米(20-60 厘米)的定位精度。此项技术的应用,使高精度卫星定位既摆脱了对地基增强网的依赖,同时又大幅降低了成本,有助于推动高精度卫星定位大规模普及应用、促进各行业信息化建设发展。RAC 卫星定位的工作原理图如图2:是由安装在机车顶端的三组普通定位接收机和处理单元组成的。

图2:RAC 卫星定位的工作原理图
RAC 高精定位接收机工作原理:
(1)如原理图所示,由三个接收机天线相位中心的所围成的物理几何图形为三角形ABC;另一个是以位于顶点的接收机的观测值(三个接收机计算出来的)所画出的几何图形A′B′C′。如图3 所示。
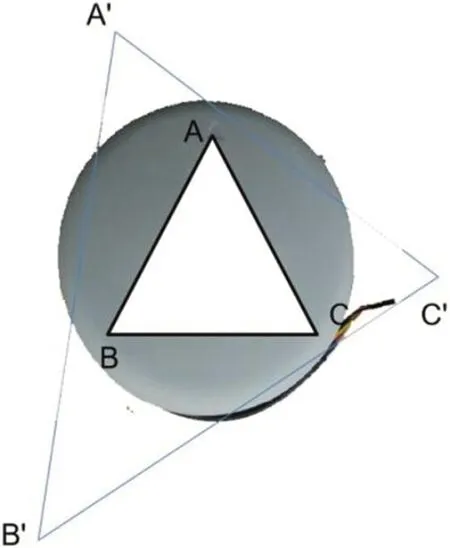
图3:几何图形
(2)三角形几何图形A′B′C′与ABC 对比:各个接收机天线相位中心的坐标观测值之间的相对位置的矢量,与已知的各个接收机天线相位中心之间的相对位置的矢量对比,就可以提取出由于各种误差而引起的偏差矢量,形成一个偏差矢量矩阵函数。
(3)再采用收敛的算法使偏差矢量矩阵趋近于零。
(4)使三角形几何图形A′B′C′无限趋近于ABC。
(5)重复进行此过程,直到偏差矢量接近于零。此时三角形ABC 与A′B′C′形状与大小相同。
(6)此时便可以解算出天线阵列几何中心点的高精度观测值的坐标信息。
4.3 RAC高精定位优势

使用范围修改费流量费短暂遮挡天线使用操作高动态RTK(载波相位) 地基网络范围内有有有敏感需注册联网不能RTD(伪距差分) 地基网络范围内有有有敏感需注册联网不能RAC(单频)开阔任何地点无无无不敏感无能
最近几十年来,卫星导航定位接收机必须依靠地基增强系统RTK的支持才能获得厘米级的定位精度,建设、维护和使用地基增强系统需要的成本巨大。然而RAC定位技术不需要任何地面基准站、差分站、惯性导航、星基增强等辅助性技术,仅使用L1 或B1 频段便可获得亚米/分米级定位精度。并解决了RTK 使用中的二个痛点问题,不受差分站地域限制,成本大幅度下降。且具有高精度、高灵敏度、低功耗、体积小等特点。如图4 所示。
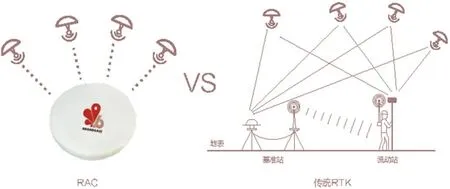
图4:RAC 高精定位优势
将RAC 定位技术运用于此次机车定位中,终端定位芯片不再需要单独定制,也无须再单独安装定位天线,此RAC 卫星接收机是集定位芯片及天馈于一体,安装方便,操作简单,只需要提供电源便能返回所在位置的定位坐标值。提供的定位值经过简单的代码处理就能应用于实际,相比于原来的RTK 方式,方便且节省投资。
4.4 RAC实施效果测试
RAC 定位接收装置是要求安装于顶部无遮挡的部位,远离高压设备装置,且高于平面一定高度水平的位置,在名种型号的机车上安装位置略有不同,最终测试安装于机车车顶中央大灯上,位置最优。
测试第一步为检测定位接收机的信号接收能力。通过通道数与卫星跟踪能力测试信号接收性能,通过接收机返回语句查看接收机收到卫星信号的通道数及跟踪卫星个数。所测试的RAC 卫星定位接收机有22 个跟踪通道,56 个捕获通道,测试时选用NMEA0183 协议以方便观察卫星的信息。测试过程中发现在空旷地带时,接收机星数能满足实际需求,在通过有遮挡的位置时,星数及通道数欠佳。在从有遮挡到无遮挡能够快速的搜星并重新定位。
第二是静态定位精度测试,测试RAC 定位技术在终端上应用的定位精度。按以下公式计算定位精度。
Xi,Yi——被测设备解算出的第i 个数据的水平坐标值;
X0,Y0——已知坐标点的水平坐标值。
测试时机车速度为0,测试时长为10min,同时记录被测设备与手持RTK 接收机的定位输出结果,将被测设备解算的位置与同一时刻RTK 接收机输出的位置值相比较。
第三为动态定位精度测试,计算公式如下:
XiD,YiD——被测设备解算出的第i 个数据的水平坐标值
Xi0,Yi0——RTK 接收机输出的水平坐标值
采用动态定位精度测试RAC 技术在终端上应用的定位精度时,将机车速度控制在30km/h 范围内,测试时长为10min,同时记录被测设备与RTK 接收机的定位输出结果,将被测设备解算的位置与同一时刻RTK 接收机输出的位置值相比较。
截取部分运动中的定位坐标数据,数据最终转换成为WGS84 坐标系下的数据,通过GIS 投影在无人机飞行的高清底图上,轨迹如图5 显示,二者在动态下重合度很高,但是在静态下RTK 优于RAC。
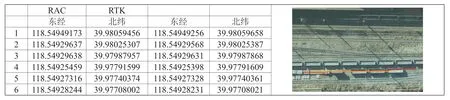
图5:解算对比
通过对记录的数据进行解算对比,在开阔地域卫星搜星正常的情况下,定位精度值PDOP 的值在小于3 范围内,与RTK 所得到的位置信息有相应的偏差,能满足实际使用需求。其中RAC 定位在运动过程中能把定位精度控制在20CM 内,在静态时表现欠佳,长时间静止时静态漂移大,静态漂移偏差最高能达90CM 左右。
在一张图调度系统中,系统与原来的轨道电路相结合将轨道形成路网,系统中实时显示机车所在股道位置及前方信号灯情况,道口视频。在定位坐标投影在地图上前,首先将定位数据进行处理,对静态漂移数据进行算法过滤、结合轨道路网、RFID 轨道标签信息的辅助、对偏移出股道的机车加偏移量进行修正补偿,始终保证机车能正确实时显示在所在股道上,完成机车精确定位股道的功能。如图6 所示,机车在站场停车后,在静止状态下也能绑定机车到正确的股道上,达到设计使用需求。
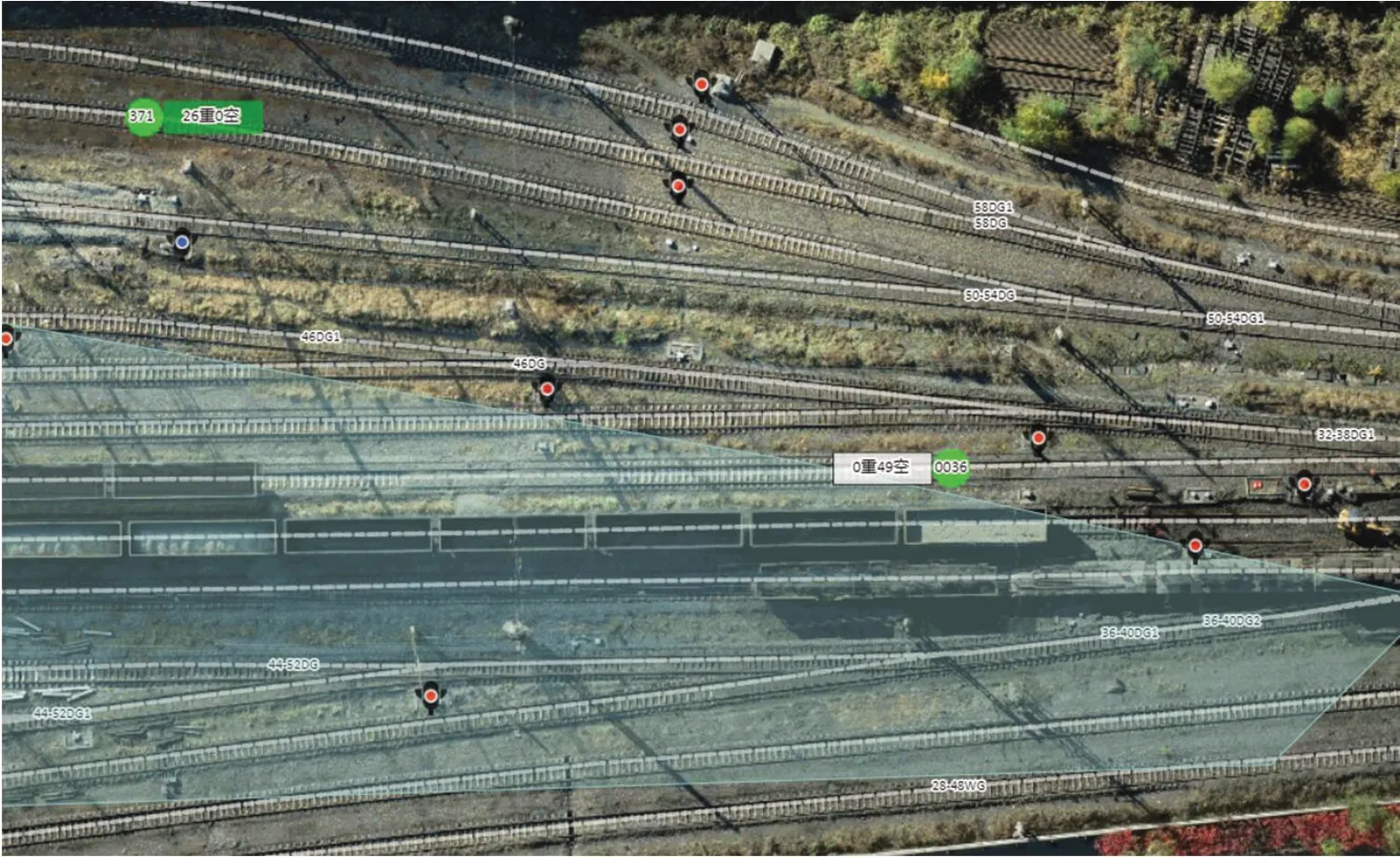
图6:机车股道定位
5 结论
运输部一张图系统的成功应用极大提高了站场调度人员的工作效率和机车定位准确度,改变了传统的靠调度人员经验调派车辆的现象,降低了调度人员的劳动强度,减少了各站场调度人员的电话沟通。通过系统就能实时显示所有运行机车的指令信息,位置信息。提升机车运行效率。通过实施智能化车地联控,使地面调度人员与机车乘务人员之间形成高效联动,达到“一张图调度指挥”的管理目标,为打造现代化的铁路运输物流产业奠定基础。该项目的实施应用,具备较好的经济效益、管理效益及社会效益。同时也对RAC 高精度定位技术在铁路运输行业的应用提供了研究价值,在其定位性能下辅助以其它算法功能,是能够满足设计使用需求,具备可运用价值,具有推广使用的可行性。
猜你喜欢
军事文摘(2023年4期)2023-04-05
中国设备工程(2023年2期)2023-02-13
装备制造技术(2021年2期)2021-07-21
铁道通信信号(2019年2期)2019-03-26
测控技术(2018年6期)2018-11-25
测控技术(2018年4期)2018-11-25
电子制作(2018年19期)2018-11-14
中国铸造装备与技术(2017年3期)2017-06-21
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
