
基于点云的轮轨接触姿态检测
2023-05-29 09:24张天艾
电子技术与软件工程 2023年7期
张天艾
(新疆大学信息科学与工程学院 新疆维吾尔自治区乌鲁木齐市 830046)
1 概述
国家铁路局官网显示2023年3月铁路运输旅客量达28038 万人,旅客周转量达1043.11 亿人公里。 1999年 8月 16日,我国第一条铁路客运线路正式开始建设,并于 2003年 10月建成投入使用。随着京津高铁于 2008年的通车,我国正式迈入了 300km/h 的高铁新时代,成为世界上高铁建设与运营规模最大的国家之一[1]。随着我国高铁的飞速发展,其高速度、低噪声、良好的舒适性等特点已经成为越来越多大众出行的首选。然而,高铁的运行安全也随着其不断发展而面临着越来越高的要求和挑战。因此,确保高铁的运行安全已经成为高铁建设和运营的重要任务之一。
在高铁为代表的复杂铁路系统中,轮轨关系是最根本的问题之一,轮轨关系是这个系统最基本的结构[2],所谓轮轨关系,指的是车轮和钢轨之间通过约100mm2的接触斑点耦合在一起[3]。在复杂的高速列车运行过程中,若轮轨接触几何姿态参数变化超过阈值或滚动接触疲劳未经处理,很可能会导致高速列车脱轨、列车冲突等灾难性后果。轮轨接触几何姿态及其接触区域的检测对于实现高铁运行过程中的轮轨接触关系预警、为高铁车辆磨损维修和疾病防治提供数据支撑以及提升列车运行安全性和保护乘客生命安全至关重要。因此,对轮轨接触几何姿态及其接触区域进行测量,具有重要意义。
此外,点云参数测量是指基于三维重建技术得到的三维点云数据,使用相关点云处理技术进行分析和计算,提取关键区域并实现待测目标的参数测量。相比人工监测,点云测量具有保留三维空间原始信息、安全性高和精度高等优点,常运用于运动目标、危险场所测量。
文中将对目前国内外关于接触姿态、接触区域检测及点云参数测量进行调研,以期为我国铁路部门相关检测提供基本思路和依据。
2 三维点云参数测量研究
点云是某个坐标系下的点的数据集,包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等,图1 展示了三维激光扫描获取的点云数据。点云参数测量是基于三维重建技术获得的三维点云数据,利用相关点云处理技术进行分析计算,提取关键区域实现待测目标的参数测量。与人工监测相比,点云测量具有保留三维空间原始信息、安全性高、精度高等优点。本文调查了基于点云测量在国内外的研究,并得出以下结论。

图1:三维激光扫描获得点云数据
首先是基于点云配准对齐的测量方法,基于点云配准对齐的测量方法是一种利用三维点云数据进行精准测量的方法。该方法采用最小势能(MPE)的全局点云配准方法,通过将目标函数定义为MPE 优化函数,将解分解为全局最优逼近过程,并使用修剪的迭代最近点算法进行一次精细配准过程,从而实现高效、精准的测量。与其他全局方法相比,该方法具有更高的精度和更好的抗噪性能。但是,为了保证测量的准确性,该方法需要足够的结构先验和完整的点云结构信息。因此,在实际应用中,需要根据具体情况来选择合适的方法。
其次是基于边缘轮廓提取的测量方法,该方法利用边缘轮廓提取技术从三维点云数据中提取出待测目标的边缘轮廓,并利用这些边缘轮廓进行参数测量。与传统的基于配准对齐的点云测量方法相比,该方法具有以下优点:一是可以快速准确地提取出待测目标的轮廓信息,不需要进行配准对齐操作,从而提高了测量的效率;二是可以避免配准对齐过程中可能出现的误差,提高了测量的精度;三是可以处理不规则形状的物体,并且不需要事先建立三维模型。
最后是基于点云投影的测量方法,该方法首先将三维点云数据在一个平面上进行投影,得到一个二维图像。然后,利用图像处理算法,提取出待测目标的关键特征点,并进行参数测量。该方法可使用线性激光传感器获得剖面的3D 点云数据。采用迭代最近点(ICP)算法对与内表面相关的点云数据进行配准。计算点云数据的法向量,并提取参考表面作为投影平面,简化的点云投影到平面上,该接触方法可以实现固体火箭发动机(SRM)的热保护层厚度的精确测量。但该法需要对完整点云精确投影以及完整的点云结构信息。该方法利用点云数据在二维平面上的投影来进行参数测量。
通过对以上点云参数测量现状分析,目前主要有配准对齐、边缘轮廓提取、点云投影、点云切片等方法,能够实现快速、高效、非接触式测量。
3 轮轨接触几何参数测量研究
列车运行过程中横移量、沉浮量、伸缩量、摇头角、侧滚角、点头角、接触角、接触斑等参数会不断发生变化。本章节对相关测量技术进行分调研分析。对于此类问题最早可追溯于从分析轮轨约束关系的特点入手,通过寻找“轮轨接触点轨迹线”,使空间问题降维成平面问题处理,从而使问题得以简化;杨阳[2]等人首先介绍了弹性车轮和常规车轮的区别,并说明了压剪复合型弹性车轮的设计原理和结构特点。随后,对该车轮在轨道接触中的应力分布和变形特征进行了分析和计算,并建立了相应的数学模型。接着,对比了压剪复合型弹性车轮和常规车轮的性能表现,证明了压剪复合型弹性车轮在减小轮轨接触压力、降低噪音、提高安全性等方面具有优势。
钱瑶[4]分析了高速铁路道岔的运行原理和接触几何关系,包括轮轨垂向接触、轮轨水平接触和横向力接触等方面。然后,通过建立轨道和轮廓模型,对道岔轮轨接触进行了数值模拟和优化,提出基于移动窗的法向切割算法,基于轮轨接触点间距离最小的原则,利用二分法原理不断迭代侧滚角,搜寻轮轨间的最小距离,从而不断缩小法向切割范围和变截面上轮轨接触范围,利用Miniprof 采集某条线路上不同服役时间下的高速车轮LMA 型面的数据,得到车轮廓形随服 役 里程的演变情况,如图2 所示,实现高速铁路道岔变截面轮轨接触几何问题的求解。
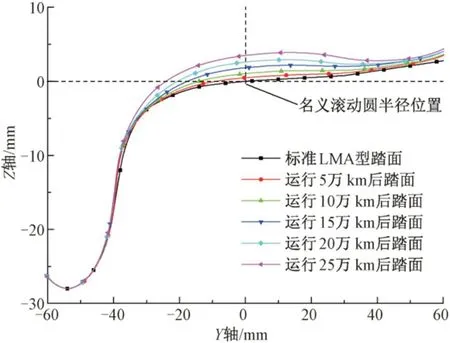
图2:实测不同运营里程下的车轮型面
秦航远等人[5]基于曲面轮廓投影,将轮轨接触区域分成多个小区域,然后使用数学模型计算每个小区域的接触点。最终,将所有小区域的接触点合并起来,得到整个轮轨接触区域。主要贡献在于提出了一种新的轮轨接触几何计算方法,可以更加准确地计算轮轨接触面积,从而提高列车的行驶稳定性和安全性。该方法还可以应用于其他领域的轮轨接触问题,具有一定的推广价值。但是该方法只是针对侧滚角很小的情况下计算的结果,对于侧滚角较大的情况未作出说明,需要进一步研究。杨桐[6]基于激光扫描仪获取轨道表面的三维点云数据,然后使用图像处理技术将点云数据转换成二维图像数据。接着,使用图像处理算法来分析轨道表面的图像信息,计算轮轨接触区域的面积和位置等关键参数;主要贡献在于提出了一种新的列车轮轨接触关系研究方法,基于图像处理技术可以更加高效地获取轮轨接触数据。该方法可以有效地减少实验和数值模拟所需的时间和资源,同时还可以提高轮轨接触数据的精度和可靠性。
钟莎[7]通过计算机视觉方法获取机车轮轨图像,然后使用Qt 框架中的图像处理模块对图像进行处理和分析。该系统还包括图像预处理模块、特征提取模块、分类模块和报警模块等组成部分。在图像预处理模块中,采用了灰度化、滤波和二值化等处理方式,以减少噪声和提高图像质量。在特征提取模块中,使用了梯度算子和轮廓提取算法来提取机车轮轨相对位移的特征信息。在分类模块中,采用了支持向量机(SVM)分类器来分类,以实现对机车轮轨相对位移状态的判断。在报警模块中,根据分类结果进行相应的报警处理。该论文的主要贡献在于提出了一种基于Qt 的机车轮轨相对位移的图像检测系统设计方法,该方法结合了图像处理技术、机器学习算法和Qt 框架,可以实现对机车运行状态的实时监测和故障诊断。该系统具有实时性高、准确率高和可靠性强等优点,可以有效地提高机车运行安全性。此外,在以车体对称的四个矩形角落安装四个测试点位,利用线阵CCD 相机与面光源组成的单目CCD 相机加平面虚拟双目立体视觉检测方案,基于此方法可以实现车体运动姿态以及动态偏移量,但是该种方法对光源布置要求高,不易实现;李田等人[8]提出改进激光三角法在线检测沉浮、横摆、摇头、点头以及侧滚五种车体运行姿态。构建出图3 所示车体坐标系与轨面随行坐标系与单测点摄影测量系统,将线激光垂直投射到轨面的激光点为测量基准,利用面阵相机获取的图像中的激光参考点的位置信息,解算车体相对于轨道的坐标转换,该方法能够实时检测轮轨之间的接触关系。
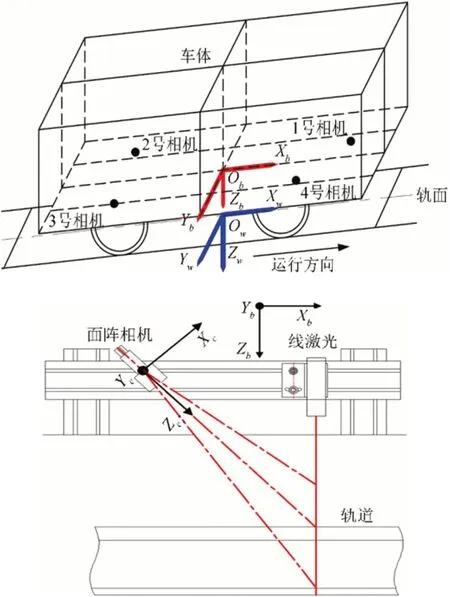
图3:车体坐标系与轨面随行坐标系与单测点摄影测量系统
4 轮轨接触斑测量研究
轮轨运行过程中会发生轮轨相互作用,导致产生蠕变力,发生在局部成为轮轨接触斑的区域。目前,针对轮轨接触有很多利用实验研究的办法进行接触斑的理论预测,但是对于接触斑进行测量的算法较少。目前接触斑相关研究主要如下:
对于接触斑的研究可以追溯到19 世纪,当时Hertz估计了接触斑的形状。Hertz 理论目前仍广泛的应用于铁路行业,根据这一研究理论,接触斑的形状被估计为椭圆形状。接触斑的产生主要是由轨面不平顺导致,图4 展示了在有限元模型计算得出的轨道平顺状态下某典型滚滑工况下法、切向接触载荷分布[11]。相关研究人员曾提出了两种预测铁路道岔和道口轮轨法向接触的模型,其中一个便是基于Hertz 接触理论,将其和Hertz方法进行比较发现Hertz 方法更为准确。
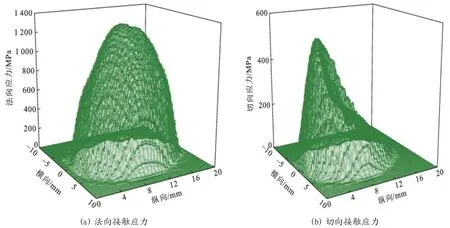
图4:典型滚滑状态下法、切向轮轨接触应力分布
秦航远等人[5]提出将钢轨廓面投影至YOZ 平面,计算投影踏面隐藏轮廓线和钢轨表面的距离,当其小于指定阈值时即可计算为接触斑,但是其方法只是针对小度数的侧滚角和伸缩量进行计算,对于其他同时存在的异常姿态未进行分析,需要进一步研究。其将踏面及轮廓外形按照数学模型构建如图5 和图6 所示。
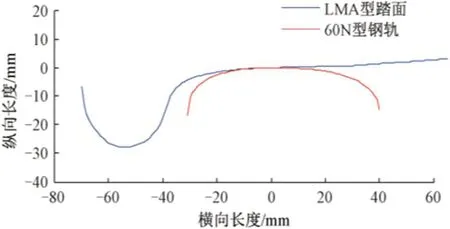
图5:踏面及廓形外形
图6:车轮三维建模
朱小杰等人[9]提出了一种改进的轮轨多点接触计算方法。首先,基于轮轨间隙函数的几何特征,采用Kik-Piotrowski 方法计算并判断轮轨多点接触。然后,考虑接触斑变形协调关系,建立轮轨法向接触应力-法向压缩量耦合方程组,求解轮轨多点接触法向力。最后,采用典型的两点接触模型检验该方法的合理性,并进一步分析了该方法在实际轮轨接触仿真中的计算精度。研究结果表明,该方法与Kalker 变分方法计算结果吻合良好,最大相对误差仅为7.5%,说明该方法可以显著提高Kik-Piotrowski 方法在轮轨多点接触问题求解中的计算精度。董小乐等人
此外,潘高等人[10]设计了一种适用于静态轮轨接触状态检测的系统。该系统实现了对扫描机构的运动控制,超声波信号的激励、采集和传输,并通过以太网通信与接触斑及应力分析显示系统实现命令接收和超声波数据上传。接触斑及应力分析显示系统实现了超声数据的接收和处理,以及实时显示和存储检测结果。通过标定实验建立了超声声压反射系数与接触应力之间的关系,采用3 次样条插值处理优化了检测效果。实验结果表明:该检测系统能够有效检测静态轮轨接触斑的几何形状和接触应力的分布情况,反映真实的轮轨接触状态。使用不同厚度的压敏薄膜也可实现接触斑检测,对不同车轮载荷和轮轨位置进行实验,结果表明,薄膜能够为压力分布提供足够的分辨率,能够很好的对接触斑进行测量,但是该方法是接触式测量,对实际工作状况中具有较低的操作性。动态轮轨接触片检测方法需要使用64个超声波元件阵列,这些元件需要安装在轨道上。每个元件依次单独脉冲,以建立界面的线性横截面压力剖面测量。然后对这些横截面和测线进行处理和整理,以得到二维接触压力分布图。但是,此方法需要在轨道旁安装大量的元件,因此可行性较低。
5 结论
目前针对轮轨接触姿态的检测研究较少,基于点云测量相关的软件技术还未深入开展。相关研究人员可以从以三维点云测量为代表的非接触测量中进行研究,并在后续的研究中进行重点探索。但基于点云的轮轨接触姿态检测存在数据量大,计算复杂度高、数据获取和预处理难度大等问题,下一步可以在基于深度学习的点云处理方法、利用智能算法,如遗传算法、模拟退火算法等,对点云数据进行优化处理,提高精度和稳定性。
猜你喜欢
铁道通信信号(2020年10期)2020-02-07
小读者(2019年24期)2020-01-19
小学生学习指导(低年级)(2019年6期)2019-07-22
汽车观察(2019年2期)2019-03-15
学与玩(2017年12期)2017-02-16
铁道通信信号(2016年6期)2016-06-01
中国铁道科学(2015年5期)2015-06-21
小学生·多元智能大王(2014年9期)2014-08-28
中国铁道科学(2014年1期)2014-06-21
