基于人机交互技术的船舶实时导航系统
2023-07-22 08:05张龙龙袁静雯金喆洙
舰船科学技术 2023年11期
张龙龙,袁静雯,金喆洙
(韩国国立釜庆大学 海洋融合设计工学学科 设计工学,韩国 釜山 48513)
0 引 言
船舶是通过导航系统进行任务执行以及实时航行路线的确定[1]。船舶导航系统提供船舶位置、航向、航速、水平以及方位基准等相关数据,主要由导航系统、定位设备等多个部分组成[2],通过各个部分之间的协作和运行,实现船舶的航行计划。由于海上环境多变且复杂程度较高[3],海上船舶数量较多,对船舶实时导航效果造成一定影响,导致其航行情况发生不同程度的偏差[4],导航结果的可视化效果不理想。此外,海上交通管理水平不断提升,对于智慧导航的需求也不断提升。罗春艳等[5]为实现船舶自主导航,以水面环境信息为基础,以获取最优路径为核心,完成船舶航行导航路径规划。该方法在应用过程中,能够精准完成导航路径的规划,但是无法实现导航结果的可视化交互。张莉等[6]为实现船舶精准导航,通过仿真模型对船舶的航行位姿和位置进行仿真模拟,实现导航系统的建模,保证船舶导航的可靠性。但是该系统在应用过程中,对于海量导航信息的处理效率较低。
人机交互技术是以计算机等输入和输出设备为依据,完成计算机和人之间的交互,该交互结果可以是二维图形交互或者三维图形交互等,并且该交互结果具有较好的视觉渲染效果,可全面呈现交互内容[7]。本文结合船舶导航存在的问题以及实时导航的需求,设计基于人机交互技术的船舶实时导航系统。
1 船舶实时导航系统
1.1 系统总体架构
为实现船舶智慧实时导航,降低环境或者天气等因素对于导航效果的影响,并全面、可靠呈现船舶导航结果,设计基于人机交互技术的船舶实时导航系统,通过该系统完成船舶智慧导航,并生成海上地图,呈现导航结果。系统整体分为3 个模块,分别为信息集成模块、导航管理模块以及人机交互模块。信息集成模块依据卫星、GPS 接收器、传感器以及纸质海图导入等,获取船舶的实时航行状态以及海图信息等,通过工业控制总线PC104 的嵌入式计算机完成上述信息的综合处理后,经由网络接口将信息传送至导航管理模块中。该模块主要依据GPS 和捷联惯导系统(SINS)系统完成船舶智慧导航,并且可完成船舶航行相关信息的查询;查询结果通过人机交互模块进行可视化交互。人机交互模块主要通过Web 构建交互模块,并且进行交互结果的渲染。此外,该模块在进行人机交互时,可控制可视化的视图角度,通过色彩显示屏呈现交互可视化结果。系统的整体架构如图1 所示。

图1 基于人机交互技术的船舶实时导航系统架构Fig. 1 Architecture of a real-time navigation system for ships based on human-computer interaction technology
信息集成模块:主要以PC104 的嵌入式计算机为核心支撑,包含卫星、GPS 接收器、多源传感器,纸质海图、PC104 总线协议以及可扩展无线网卡等部分,主要作用是获取船舶航行的相关信息,并实现信息的集成。通过协议总线将信息传送至导航管理模块,为船舶实时导航提供信息依据。
导航管理模块:接收信息集成模块传送信息后并将其存储在数据库中,实现船舶导航以及船舶航行相关信息的查询,包含船舶方位、运动轨迹、航行速度、当前实时位置以及规划航行线路等。其中,船舶的导航是通过INS/GPS 组合导航模型完成。
人机交互模块:主要包含视图控制、图层控制、彩色显示器、Web页面以及Node.js 技术等部分,完成船舶智慧导航结果的可视化渲染,并通过显示屏完成人机交互。
1.2 信息集成模块结构
船舶综合导航信息的管理是实现船舶实时导航的重要依据,因此,为保证船舶实时导航效果,以PC104 的嵌入式计算机为核心构建信息集成模块,实现综合导航信息的集成管理,该模块的整体结构如图2所示。在进行船舶综合信息管理过程中,为保证信息的安全传输,以PC140 总线协议作为传输协议,保证信息的传输安全性,并且设有2 个EMERALD-MM 八串口卡、串口接口协议、CAN 卡、以太网接口等,以此满足综合船舶导航的管理需求。

图2 信息集成模块结构Fig. 2 Information integration module structure
1.3 导航管理模块设计
1.3.1 导航管理模块结构
实现船舶的实时智慧导航是系统的核心目标,因此,导航管理模块是系统的核心功能模块,该模块的整体结构如图3 所示。该模块以S3C2440 作为微处理器,实现电子地图的管理以及视图控制。同时,通过该处理器控制并调用导航管理模块中的步动态随机存取存储器、内部存储器中的信息,并将信息传送INS/GPS 组合导航模型中,进行船舶的实时导航。
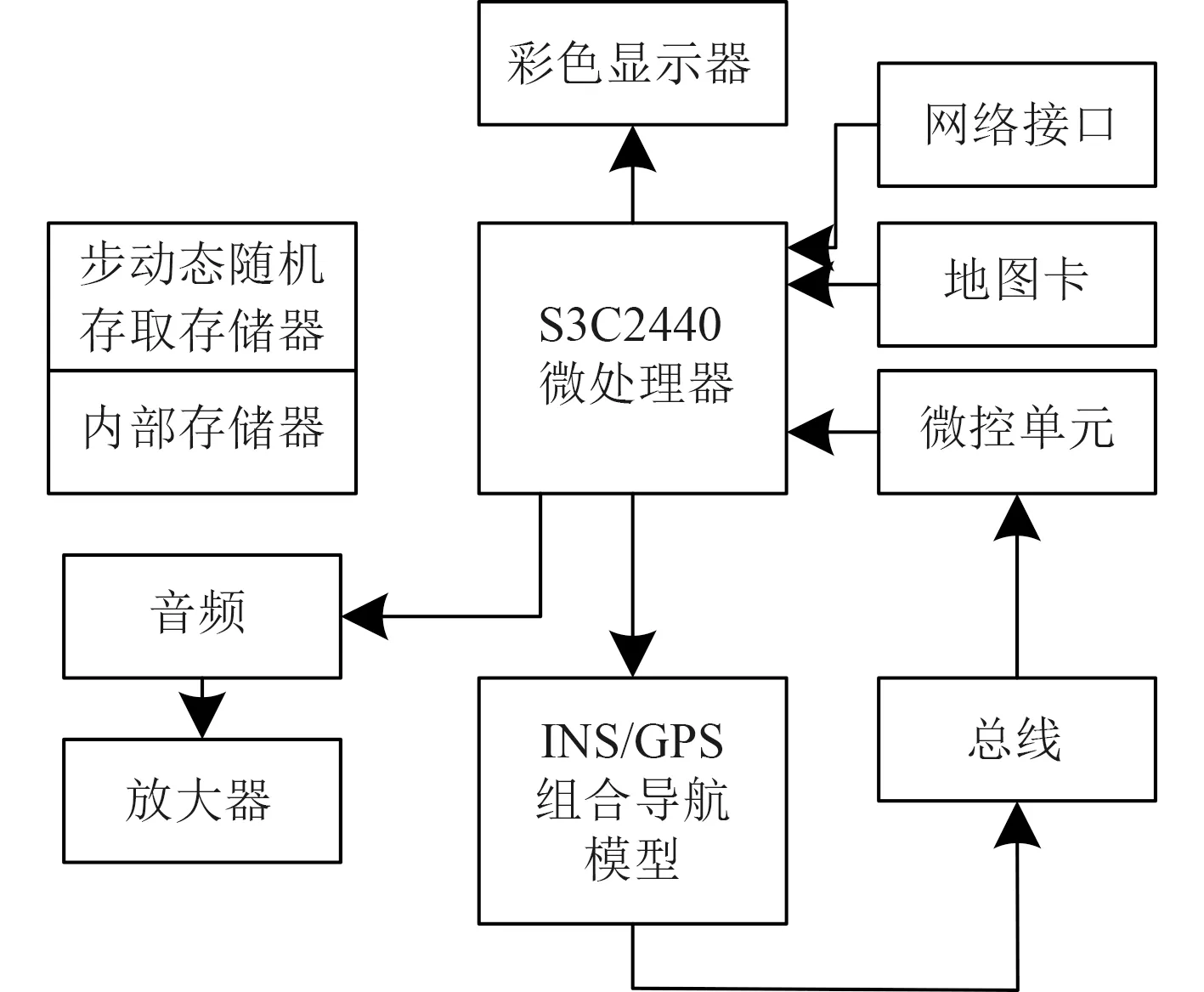
图3 导航管理模块结构Fig. 3 Navigation Management Module Structure
1.3.2 基于INS/GPS 的船舶导航模型
导航管理模块为精准、有效完成船舶的实时导航,将INS 和GPS 相结合,构成INS/GPS 船舶导航模型,能够充分利用存储的船舶导航相关信息,有效避免导航结果发生发散现象。如果船舶的状态变量和状态方程分别用和x表示,两者的计算公式为:
式中:F表示船舶状态转移矩阵;w表示导航误差;φ表示偏航姿态角误差; δv表示速度误差; δp表示经纬高位置误差;ba和bg表示位置漂移和陀螺常值漂移。
量测方程用z表示,其计算公式为:
式 中: δPGPS和 δVGPS均 表示 误 差,前 者 对 应GPS 测 量位置,后者对应GPS 测量速度; δPIMU和 δVIMU均表示误差,前者对应惯性器件积分位置,后者对应管型器件速度;v表示GPS 系统误差,H表示GPS 系统的量测矩阵,其表达式为:
依据GPS 测量数据即可获取状态变量的估计结果。在此基础上,引入Kalman 滤波算法,Kalman 滤波状态模型公式为:
1.4 人机交互模块结构
该模块的主要作用是实现导航结果和用户之间的可视化交互,并且在交互过程中,为保证交互效果,通过Node.js 技术进行信息渲染,最后通过 Web页面的形式展示给用户。该模块整体分为:用户交互设计功能、信息渲染功能、交互页面加载功能。通过3 个部分的结合,实现船舶导航结果的人机交互。该模块的整体结构如图4 所示。

图4 人机交互可视化技术结构Fig. 4 Structure of human-machine interaction visualization technology
1)用户交互设计功能
该功能主要完成交互界面的设计,对于交互页面结构而言,采用分布加载的方式完成前端加载过程的设计,优化加载性能,同时设有信息容灾备份功能,一旦在交互过程中,交互界面加载失败,则可马上进行回滚操作,保证页面交互时的流畅性,并较少页面加载时间。
2)信息渲染功能
信息渲染是人机交互时的重要部分,渲染主要分为2 个部分,一是前端加载渲染,另一个是局部渲染,两者均利用Node.js 技术完成。该功能在应用过程中,可在不依赖用户属性的前提下,完成前端交互平台所有信息的分流化处理,使其形成用户操作的相关信息以及显示信息,同时通过MongoDB 数据库完成交互信息的维护。
3)交互页面加载功能
该功能的主要作用是提升Web 交互页面的加载效率、降低用户的操作以及等待时间,实现船舶导航结果的高效展示。在该功能中引入信息缓存技术,保证网络状态不稳定的情况下的交互效果。
2 测试结果与分析
为验证本文系统的应用效果,将某救援船舶作为目标,进行相关测试。该船排水量为5 564 t,功率为8500 kW,长为95 m,型宽为14.7 m,型深为7.5 m,续航能力1 500 nmile。该救援船主要用于深海救援,海域搜索范围268 nmile。其搜索海域内存在多条海洋暗流、并且小型岛屿和暗礁数量较多,同时该海域位于多个航线的公共航信经过区域,船舶经航数量相对较多。因此,该船在作业过程中对于导航的要求较高。
使用的导航系统和传感器相关参数如表1 所示。

表1 导航系统和传感器相关参数Tab. 1 Navigation system and sensor related parameters
应用本文系统后,船舶在运行过程中能够及时查询实时导航结果,呈现船舶所在位置的经度和纬度,并且可查看船舶的实时航行速度。因此,本文系统应用效果较好,能够完成船舶导航结果的实时查询。
为验证本文系统对于船舶的导航效果,获取船舶在不同的航行距离下,偏航角、航行速度的导航误差结果,如表2 所示。其中偏航角和航行速度的允许偏差结果分别为5.2°和0.5 m/s。依据表2 测试结果可知,随着船舶航行距离的逐渐增加,偏航角、航行速度的导航误差结果均在允许的标准范围内,两者的最大误差分别为4.6°和0.44 m/s。
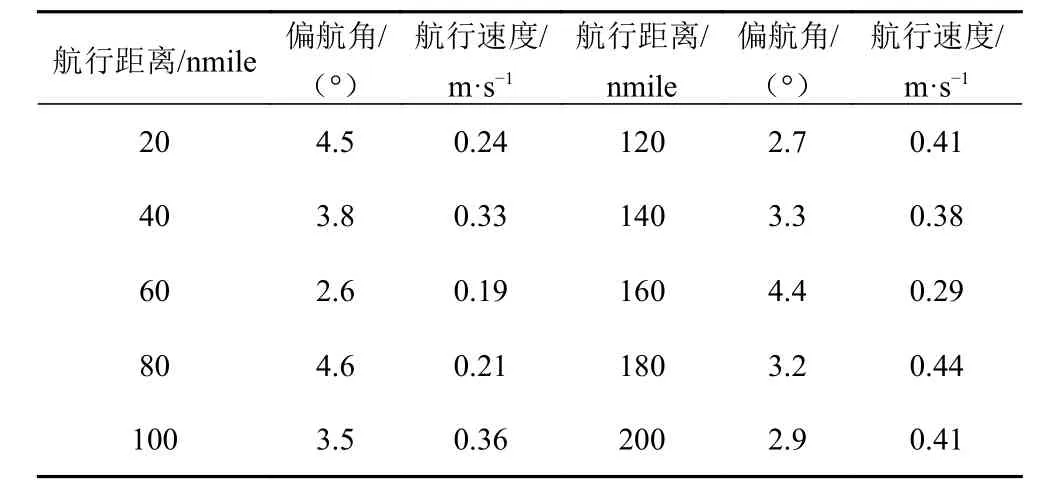
表2 偏航角、航行速度的导航误差结果Tab. 2 Navigation error results of yaw angle and navigation speed
为进一步验证本文系统的导航效果,获取船舶在作业过程中的航迹导航结果,将该结果和设定航线结果进行对比,如图5 所示。可知:本文系统能够精准完成船舶作业航迹导航,并且导航结果和设定航线之间吻合程度较高,能够保证船舶的安全航行。

图5 船舶在作业过程中的航迹导航结果Fig. 5 Navigation results of ship's track during operation
为验证本文系统的船舶导航人机交互效果,获取船舶导航结果的交互结果。本文系统,能够有效完成船舶导航结果的可视化,并呈现航向海域内的详细情况,具有较好的人机交互效果,能够全面呈现船舶的导航结果。
3 结 语
为提升船舶导航的智慧水平以及实时性,全面掌握船舶航行状态,并实现导航结果的可视化交互,设计基于人机交互技术的船舶实时导航系统,并对该系统的应用效果展开相关测试。结果表明,该系统能够精准掌握船舶的实时航行情况,并且能够按照设定的航行线路精准完成船舶航行导航,全面呈现导航结果的可视化交互。
猜你喜欢
保健医苑(2022年1期)2022-08-30
疯狂英语·新读写(2021年6期)2021-08-05
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中学生英语(2017年6期)2017-07-31
中国惯性技术学报(2017年1期)2017-06-09
青年歌声(2017年6期)2017-03-13
百科探秘·航空航天(2016年9期)2016-12-01
网络安全技术与应用(2011年3期)2011-03-14
河北软件职业技术学院学报(2010年3期)2010-06-06