光伏并网逆变器改进虚拟同步控制策略分析与测试
2023-07-26 12:43刘会强刘石川邢华栋张爱军慕腾
科学技术与工程 2023年19期
刘会强, 刘石川, 邢华栋, 张爱军, 慕腾
(1.内蒙古电力科学研究院, 呼和浩特 010020;2.内蒙古自治区新型电力系统智能电网企业重点实验室, 呼和浩特 010020)
在响应国家“碳达峰·碳中和”绿色生态能源战略格局以及构建以新能源为主导的“双高”新型电力系统安全清洁发展背景下[1],基于非线性、强耦合等逆变设备并网的光伏电站正在取代传统同步电机,低惯量、弱阻尼已经成为电网不安全因素[2-3],例如,中国最大光伏发电站内蒙古达拉特旗“领跑者光伏发电奖励基地”并网后已经出现新的振荡频带。依据最新新能源场站接入系统导则,规模化光伏电站必须配置一定比例约束的静止无功发生器(static var generators,SVG)才能并网运行,研究表明,控制方式灵活、结构设计良好的光伏逆变器、SVG等电子器件通过附加控制可以为低惯量支撑系统的阻尼振荡能力起到积极作用[4-5]。
针对光伏并网系统阻尼特性与系统振荡稳定研究,相关学者开展了研究工作。文献[6]基于pade-泰勒级数近似方法,建立考虑延时控制的光伏并网系统精确小信号模型,算例分析得出,运行在宽范围区间的弱系统,锁相环与逆变器双环控制会产生“借”阻尼导致新的振荡模式,削弱系统稳定能力,但尚未对光伏逆变器与锁相环之间的耦合关系建立控制器。文献[7]提出通过锁相机制同步功率平衡方法并建立全阶新型并网光伏系统,根据轨迹法得出,分别比较比例积分(proportional integral,PI)调制的逆变器直流电压外环、电流解耦内环控制参数的比例系数、积分系数,合理调制比例系数可以改善系统阻尼特性,只通过某一特征根变化规律选择的参数缺乏科学可靠的量化设计标准。文献[8]提出通过留数比辨识信号的光伏附加基于鱼群算法整定优化参数的阻尼控制器,基于高斯理论的伪随机小信号因子解决振荡系统多目标函数寻优,快速有效平息了系统振荡,缺少多个光伏电站同时接入复杂多机系统不同位置的研究。文献[9]基于光伏电站多峰函数特征采用分散定位逼近极值的方式优化最大功率点跟踪能力,保障了系统趋于稳定时出现反复振荡。但该算法本身具有一定随机性,且未充分考虑光伏输出功率与算法优化的协调控制。文献[10]提出一种基于分时复合控制的光伏电压二次脉动改进控制方案,通过对最大功率点跟踪算法加入二次脉动抑制环节对电压脉动进行抑制。但改进控制的解耦电容容量有限,缺乏对并网系统扰动下的振荡抑制能力。
规模化光伏电站配备的SVG有效支撑并网母线电压,通过相关控制具有阻尼功率振荡能力。文献[11]针对经过远距离输电线路送出的大规模光伏电站,等效发电单元阻抗较大引发系统不稳定,提出在电网电感阻抗为SVG补偿功率的1/2时,通过串联超前校正控制,可以保证系统安全稳定运行,但紧通过对谐振点附近的相位校正存在阻抗补偿局限性。文献[12]提出利用总体最小二乘/旋转矢量不变技术(total least squares/rotation vector invariant technique,TLS-ESPRIT)辨识振荡特性并设计了基于二次观测器的线性优化控制方法,仿真表明光伏逆变器、SVG控制环节附加阻尼控制器对全局振荡模式抑制效果显著,但近似线性可控的观测器在低阶模型应用时仅对局部电压控制敏感。文献[13]提出通过SVG附加阻尼策略抑制弱电网并入大型光伏电站导致的次同步振荡问题,调节控制器产生在等效次同步频率下的“正电阻”实现振荡能量消耗,但该控制器针对特定频带有效且存在参数全局优化问题。综上,针对光伏逆变器设计的阻尼控制器在主要满足最大功率跟踪控制时对功率振荡抑制能力较有限,且基于SVG和光伏双闭环控制回路附加阻尼控制器未考虑模型辨识,存在数学模型阶数过高、低鲁棒性、工程控制复杂等问题。
现分析推理光伏电站附加控制增加系统阻尼转矩机理,通过TLS-ESPRIT算法辨识得到降阶系统开环模型,通过多目标遗传算法优化回路成形权函数,然后基于H∞控制理论设计光伏及SVG改进阻尼控制器并进行参数整定,依托RT-LAB硬件在环测试了控制方法的准确性。
1 光伏电站提升阻尼转矩机理分析
1.1 光伏并网系统
光伏并网的详细系统结构如图1所示,其中,并网母线按照最新《电力系统导则》配置符合规范比例的SVG,光伏电站由若干相同控制相同的光伏阵列聚合等效。
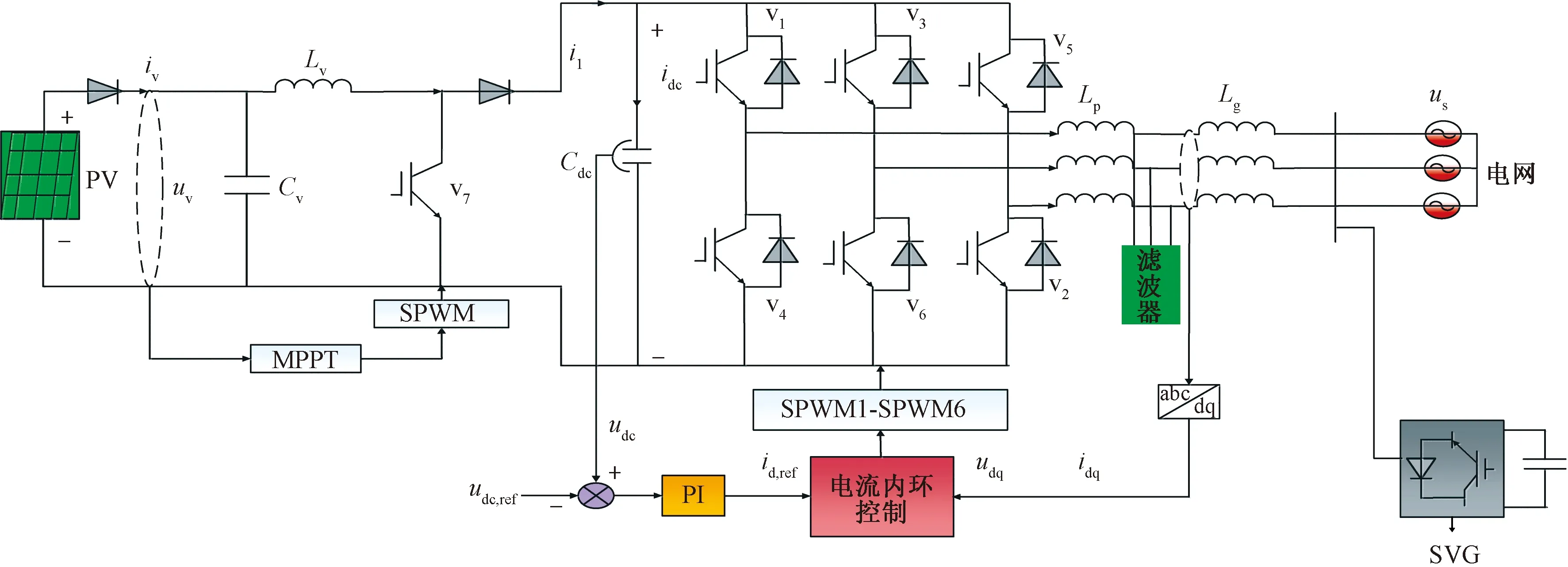
图1 光伏电站结构及控制系统Fig.1 Structure and control system of photovoltaic power station
光伏电板PV发出的直流电iv、电压uv先经过升压电路将直流电压变换为并网逆变器额定电压,升压电路由升压电感Lv和储能电容Cv构成,光伏及逆变器输出功率通过直流侧电容Cdc解耦,之后逆变器通过控制系统将直流电i1转换为交流电ig并入电网[14]。其中Lp、Lg、ig、us分别为逆变器侧电感、网侧电感、并网电流和三相电网电压。PV为光伏阵列、三相并网逆变器由v1~v6组成。光伏电板的最大功率点跟踪(maximum power point tracking,MPPT)控制[15]根据uv和iv得到正弦波脉宽调制信号(sine wave pulse width modulation,SPWM),控制开关管v7的通断从而使光伏发电工作在最大功率点处。光伏逆变器控制系统将直流侧电压实际值udc和设定值ud,cref作为外环输入,通过比例积分(proportional integral,PI)控制输出id,ref作为电流内环指令值来维持直流侧电压的恒定;同时,控制器辨识并将并网系统交流侧电压、电流ud、uq、id、iq作为电流内环有功、无功解耦控制输入值,最后,逆变器触发SPWM驱动电路进行并网控制。
光伏并网逆变器功率外环控制结构简单清晰,可以通过改进控制策略改善系统稳定特性,同时,新能源场站配置的SVG具备持续的无功电压支撑能力,其拓扑结构及电压外环控制策略与光伏逆变器类似,因此,对光伏电站改进控制策略提高并网系统稳定特性展开研究。
1.2 光伏电站附加阻尼转矩机理分析

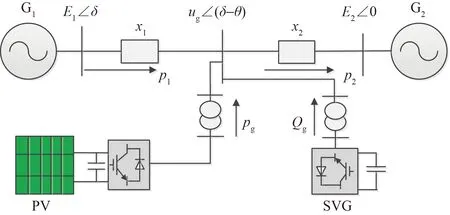
G1为同步发电机组;G2为无穷大系统;ug为光伏电站并网点电压;E1为G1的暂态电势;E2为G2端电压;θ为E1与ug的相角差;δ为E1与E2的相角差;x1、x2为线路电抗,Qg为SVG输出无功功率;p1为发出功率;p2为系统功率图2 光伏电站并网电路图Fig.2 Grid connection circuit diagram of photovoltaic power station
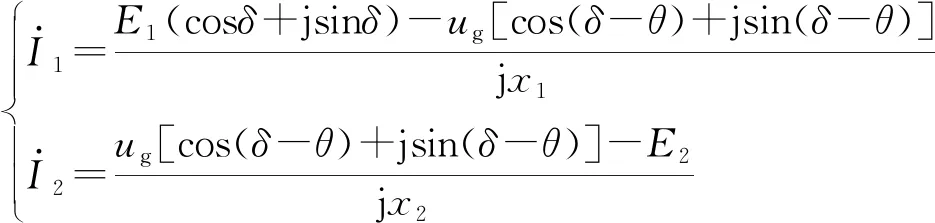
(1)
由此得到同步电机G1发出功率p1与光伏电站并网后汇入系统功率p2为
(2)
不计同步机励磁、调速因素,二阶经典模型的同步机小扰动方程为
HGp2Δδ+DpΔδ+ΔpG=0
(3)
式(3)中:HG为惯量系数;D为阻尼系数,在初始条件下对式(2)进行小扰动方程线性化,得
(4)
考虑光伏电站附加阻尼控制,有
(5)
式(5)中:Δpg为有功增量;kpv为光伏逆变器阻尼控制系数设定无穷大系统G2电压幅值恒定,即ΔE2=0,SVG电压附加调节为
(6)
式(6)中:ksvg为SVG附加无功功率调节系数。考虑同步机线性化的转子动态表达式结合式(3)得
(7)
式(7)中:ΔpE为电磁转矩;Δpm为机械转矩,系统G2增量方程为

(8)
由同步机、光伏及大电网功率平衡关系得
Δp2=Δp1+Δpg
(9)
将式(5)、式(6)结合式(9)代入式(8)得光伏电站协同SVG附加阻尼调制后的线性化方程为

(10)
由式(10)可知,光伏电站通过逆变器直流电压外环附加控制,设计满足要求的控制器kpv,可以为电网提供阻尼支撑;同时,充分发挥光伏电站配置的SVG无功功率支撑作用,设计鲁棒性能优越的控制器ksvg通过附加无功电压调节,可以进一步显著增强光伏电站并入弱电网的阻尼特性,有力提升抑制系统功率振荡能力,保证弱并网系统安全稳定运行。
2 基于遗传算法优化的回路成形控制
2.1 回路成形
选取前、后串联权函数w1、w2对开环函数Gsvg、Gpv进行整形拟合,为避免通过人工经验凑数选取的权函数带来的不准确性。本文中提出利用多目标遗传算法(non-dominated sorting genetic algorithm-II,NSGA-II)优化并选取加权函数参数。NSGA-II是基于精英策略来均衡多目标参数优化的非支配排列遗传算法,具有优秀种群占比高、快速支配效率高的特点[17]。考虑控制性能和鲁棒性,奇异值曲线应该满足低频段高增益、高频段低增益、穿越频率足够大的原则,为使整形后系统的奇异值增益曲线为理论值,本文中权函数的选取条件如下。
(1)低频段,考虑在低频处(1×10-3rad/s)对应最小奇异值曲线R1的最大值,满足R1>30 dB。
(2)高频段,考虑在高频处(1×103rad/s)对应最大奇异值曲线R2的最小值,满足-R2<20 dB。
(3)中频段的下降频率,考虑平均奇异值曲线分别在频率1 rad/s对应的奇异值R3与频率10 rad/s对应的奇异值R4差值的最大值,满足R3-R4>20 dB。
(4)穿越频率,考虑最小奇异值曲线在1 rad/s对应的奇异值R5的最大值,满足R5>5 dB。
多目标遗传算法针对低频段、高频段、中频段、穿越频率对应的奇异值曲线最大、最小值作为多个目标值进行寻优,同时考虑全局最优及控制器鲁棒性能得到串联前后权函数分别为
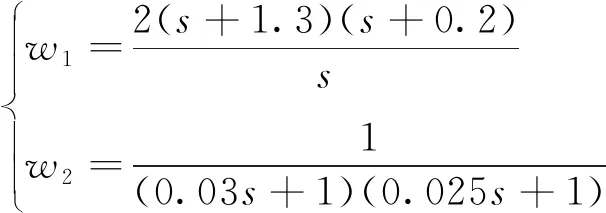
(11)
式(1)中:s为拉普拉斯算子,回路成形后的系统Gp为
Gp=w2(s)G(s)w1(s)
(12)
基于NSGA-II算法得到的回路成形后的奇异值特性曲线对比如图3所示。由此可知,成形系统在低频段增益大于30 dB,满足跟踪性能好、抗扰动能力强的优点;在高频段以-60 dB/dec的斜率下降,保证了系统快速响应;奇异值曲线穿过0 dB时斜率为-20 dB/dec,保证了稳态性能。因此,达到设计要求。
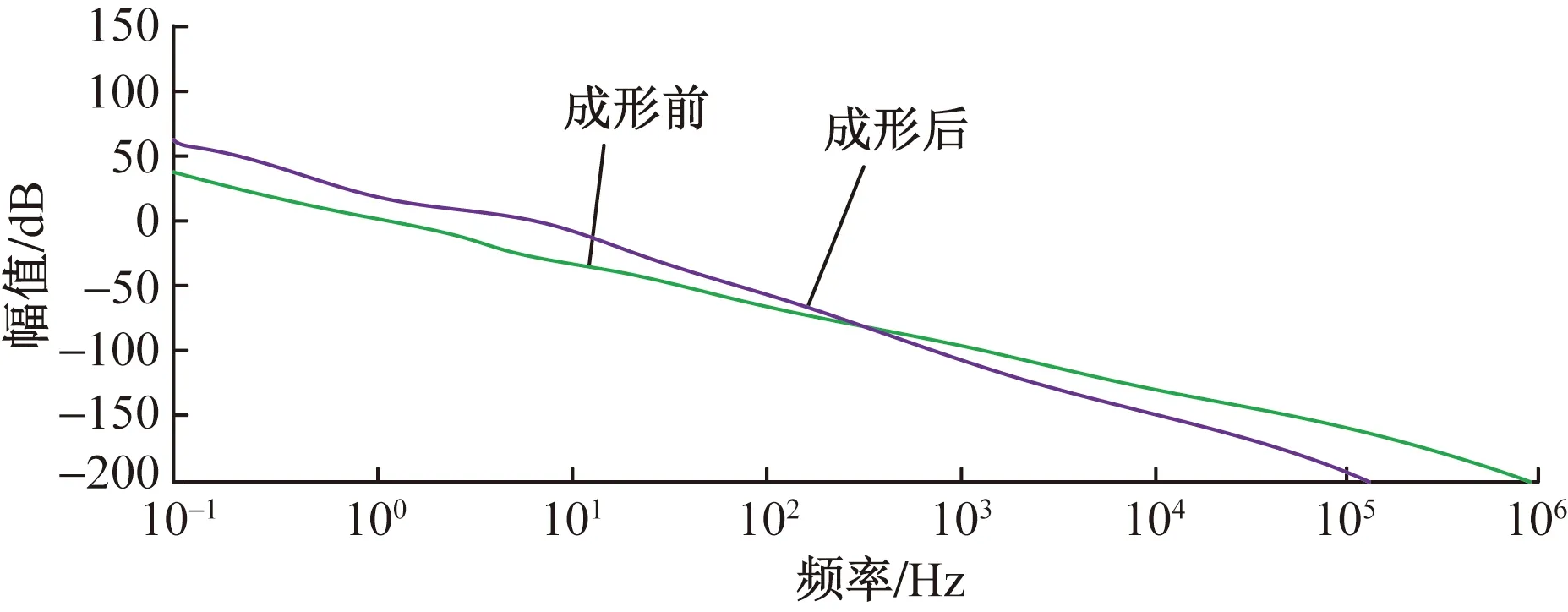
图3 回路成形前后奇异值曲线Fig.3 Singular value curve before and after loop forming
2.2 鲁棒镇定
设Gp(s)=M-1(s)N(s),满足M(s)MT(s)+N(s)NT(s)=I,其中,M(s)、N(s)定义为Gp的正规化左互质分解,计算系统最大稳定裕度,即


(13)
式(13)中:||·||H为Hankle范数;I为单位矩阵。研究表明当εmax取值在[0.2,1]时,满足鲁棒性能[18],镇定控制器k∞(s)计算公式为

(14)
式(14)中:设计得到的控制器可以镇定受控对象的扰动集合模型,如图4所示。
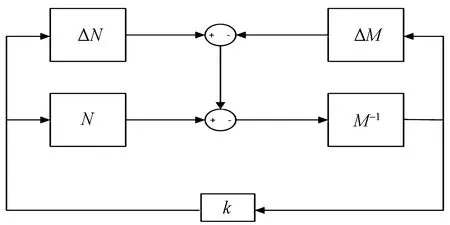
图4 互质因子不确定性分解Fig.4 Coprime factor uncertainty decomposition
互质因子不确定性干扰模型集合为
GΔ=(M+ΔM)-1(N+ΔN)
(15)
ΔM、ΔN为被控系统的不确定性因子,满足

(16)
式(16)中:RH∞为无极点有理函数矩阵在坐标实轴构成的空间。
2.3 控制器的成形
由步骤(1)优化选取的权函数,步骤(2)得到的鲁棒镇定控制器k∞(s),最终确定输出反馈控制器k(s)为
k(s)=w2(s)k∞(s)w1(s)
(17)
3 仿真验证
基于RT-ALB仿真实验平台对控制策略进行硬件在环验证,上位机基于Simulink软件对光伏并网系统主电路建模,然后加载数字模型到仿真平台。Simulink搭建的某含光伏电站的IEEE 2区域4机系统,如图5所示,其中,并网光伏电站为某区域电网某一在运电站,光伏电站经逆变后与SVG通过母线6并入电网,阻尼控制器输入信号为发电机G1、G3角速度偏差Δωs。光伏电站正常方式有功最大功率为250 MW。设定电站辐照强度初始值为800 W/m2,同步发电机组均未装设电力系统稳定器(power system stabilizer,PSS),机组容量900 MW,区域1向区域2的传输功率正常为220 MW。
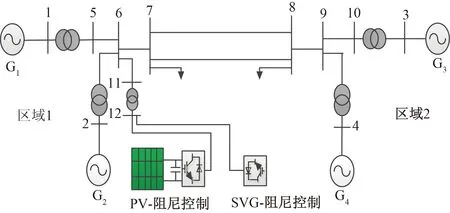
图5 光伏电站并网系统Fig.5 Grid connected system of photovoltaic power station
对图5所示的四机两区域系统采用TLS-ESPRIT算法[19]辨识系统的振荡模式。分别以发电机G1、G3为激励点,辨识得到区域1与区域2存在0.71 Hz阻尼比为4.28%的区间振荡模式以及0.71 Hz阻尼比为4.25%的本地振荡模式。光伏电站参数见表1。
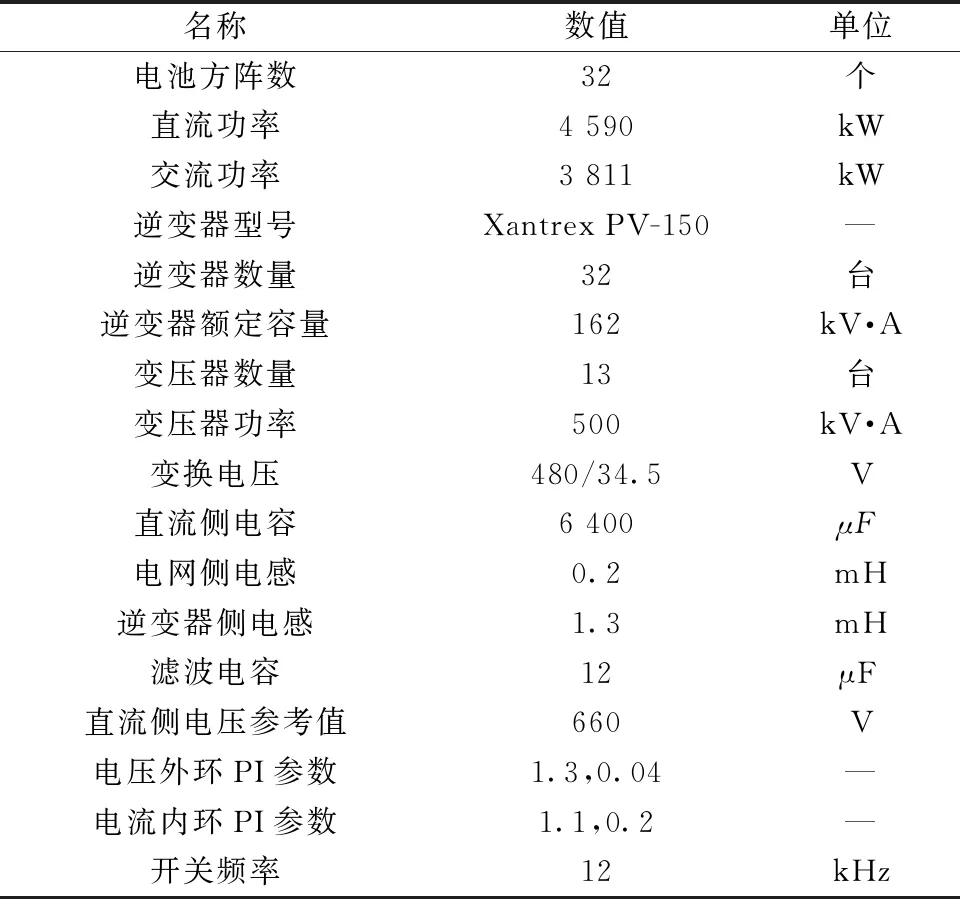
表1 光伏发电站主要参数Table 1 Main parameters of photovoltaic power station
3.1 光伏、SVG附加H∞阻尼控制器设计
系统进入稳态运行后,在光伏逆变器定直流电压参考值处设置阶跃扰动,通过TLS-ESPRIT算法辨识并经过平衡截断法降阶[20]得到开环传递函数Gpv作为被控对象,其表达式为
Gpv(s)=66.25s6-7 215s5+2 561s4-3 568s3-12 564s2-2 541 563s(s6+12.65s5+15.52s4+562.87s3+3 624s2+8 745s+36 541)-1
(18)
本文中采用多目标遗传算法优化后的权函数式(11)进行H∞回路成形,然后利用MATLAB回路成形工具箱得到系统最大鲁棒稳定裕度ε∞=0.425 06,通过式(14)求得光伏逆变器附加H∞阻尼控制器kpv为

(19)
得到SVG附加阻尼控制器如图6所示。

图6 PV附加H∞阻尼控制器Fig.6 PV additional damping controller
为进一步充分利用SVG无功功率灵活调节优势,参照3.1节PV阻尼控制器设计方法,设计SVG电压环附加H∞阻尼控制器实现功率振荡有效抑制。选取相同权函数进行H∞回路成形,通过式(14)求得SVG逆变器附加H∞阻尼控制器ksvg为

ε∞=0.369 85
(20)
得到SVG附加阻尼控制器如图7所示。图8为光伏协同SVG附加H∞阻尼控制逻辑图。H∞阻尼控制器分别附加于光伏、SVG逆变器的电压及无功功率外环,外环附加控制的输出电流分别作为电流内环的直轴参考电流Id,ref,交轴参考电流Iq,ref输入,通过直轴交轴解耦后,得到光伏及SVG的目标输出响应特性。
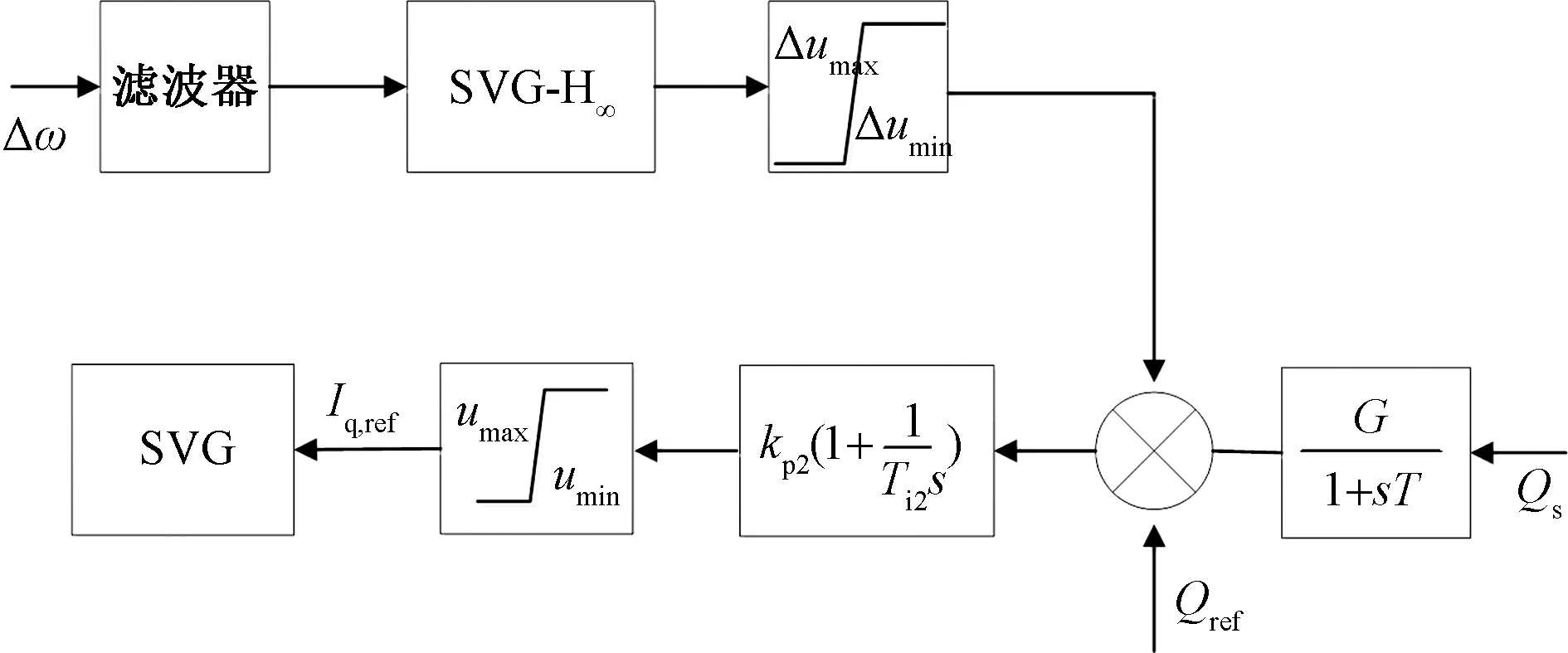
图7 SVG附加H∞阻尼控制器Fig.7 SVG additional damping controller
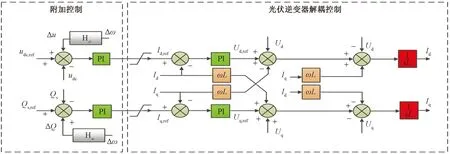
图8 光伏附加H∞阻尼控制器Fig.8 PV additional damping controller
3.2 光伏附加阻尼控制验证
在实验室采用OPRT5600系列的RT-ALB仿真实验平台对控制策略进行硬件在环验证,改进回路成形控制算法通过TMS320F28335的DSP28335芯片实现,DSP通过TCP/IP协议连接主电路实现与逆变器交互。硬件实物部分为实际工程所用控制器,通过I/O物理接口接入平台。其中,主电路采集得到的电压电流等数字信号,经调理电路送达DSP控制芯片,DSP对采集信号进行算法处理后产生开关信号。开关信号再经过数字输入I/O口送到仿真电路触发开关管开断。实验平台如图9所示。

图9 光伏并网系统仿真实验平台Fig.9 Photovoltaic grid connected system simulation experiment platform
正常运行方式,光伏电站在光照强度1 500 W/m2、温度25 ℃工况下工作;设置送端节点11在1.8 s出现三相非直接接地瞬时扰动,0.05 s后扰动消失;仿真光伏逆变器在无附加控制和附加H∞阻尼控制下抑制系统功率振荡的效果,同时,通过传统PID控制器与设计的H∞阻尼控制器对比来验证其鲁棒性能,图10、图11分别为各种控制方式下联络线传输功率和发电机G1、G3转速差响应的对比曲线。
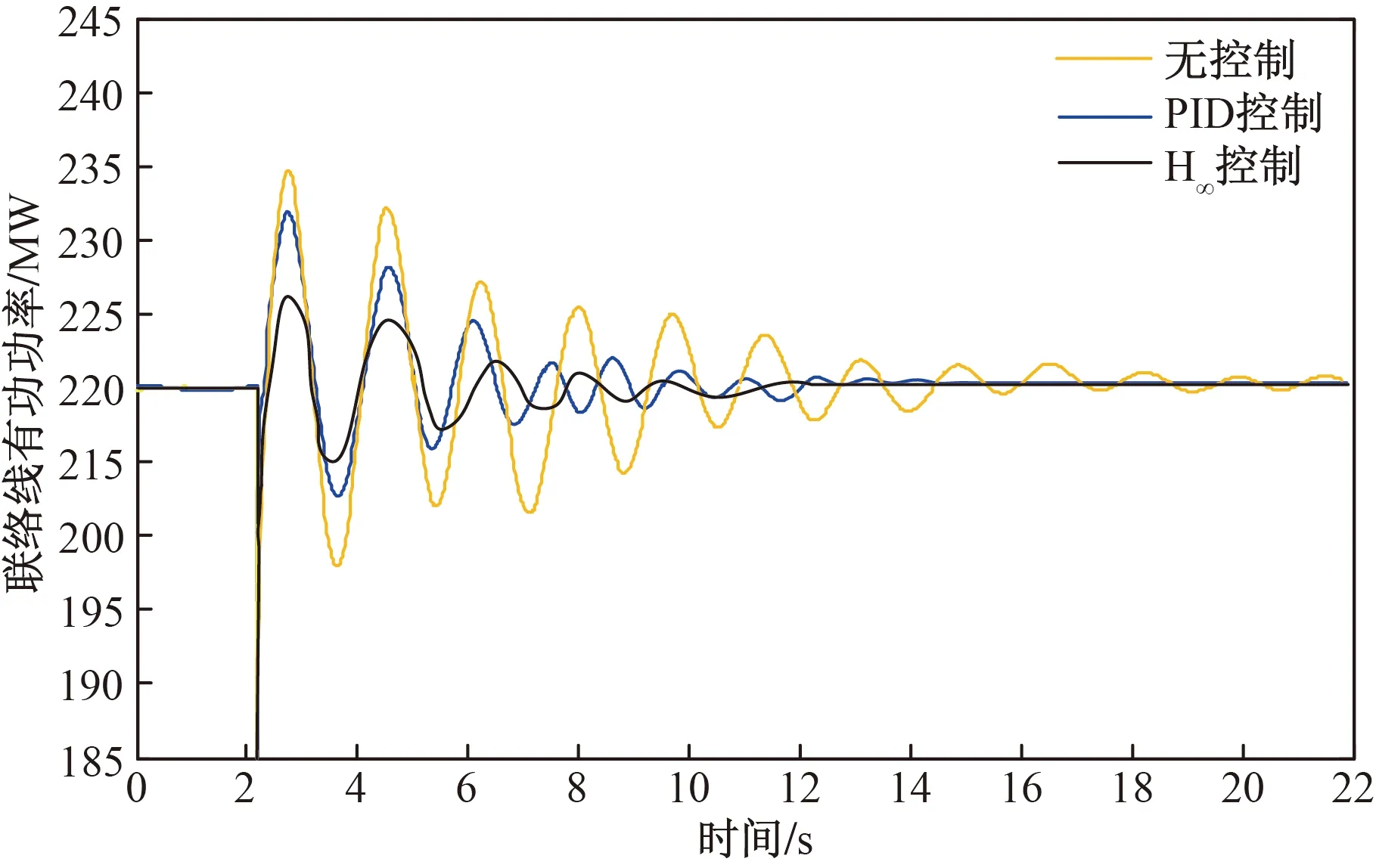
图10 光伏电站附加控制下联络线有功响应Fig.10 Active power response of tie line under additional control of photovoltaic power station
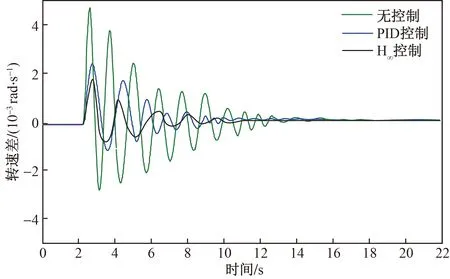
图11 发电机G1、G3转速差响应Fig.11 Generator G1、G3 speed difference response
图10、图11可知,无附加控制,故障扰动下联络线传输功率、发电机功角差需要较长衰减时间;对比光伏电站附加PID控制和H∞控制:联络线有功振荡分别在15 s和12 s得到有效抑制,发电机G1、G3转速差分别在16 s和13 s趋于稳定;得出光伏电站附加控制器可以提高系统阻尼特性,但H∞控制器控制性能、鲁棒性更强,抑制功率振荡能力要优于传统控制方法。
3.3 光伏协同SVG附加阻尼控制验证
同样工况下,在光伏电站、SVG无功功率控制处分别附加传统PID控制器和H∞阻尼控制器,设置相同扰动下,验证SVG附加H∞阻尼控制器以及与光伏电站协同控制的有效性。如图12~图14所示为联络线功率、G1、G3转速差和光伏协同SVG并网点电压曲线。图12~图14中,PID/PID控制表示光伏、SVG均附加传统PID阻尼控制器;PID/H∞表示光伏附加PID控制,SVG附加H∞控制,H∞/H∞表示光伏、SVG均附加H∞控制。

图12 光伏协同SVG附加控制联络线有功响应Fig.12 Active power response of PV collaborative SVG additional control tie
由图12和图13可知,光伏附加PID阻尼控制器方式下,同时在其配置的SVG功率控制环附加阻尼控制器,可以进一步提高系统在振荡下的稳定能力,通过分析可得:光伏、SVG分别附加PID、H∞阻尼控制器抑制系统振荡能力要优于两者均为PID控制模式;但是,如果光伏、SVG都附加鲁棒性能优越的H∞阻尼控制器显然是最有效抑制系统功率振荡的方法。图14表明,在采取H∞控制器模式下,光伏协同SVG附加控制在提高阻尼能力的同时,有效保证了并网母线电压的稳定性。
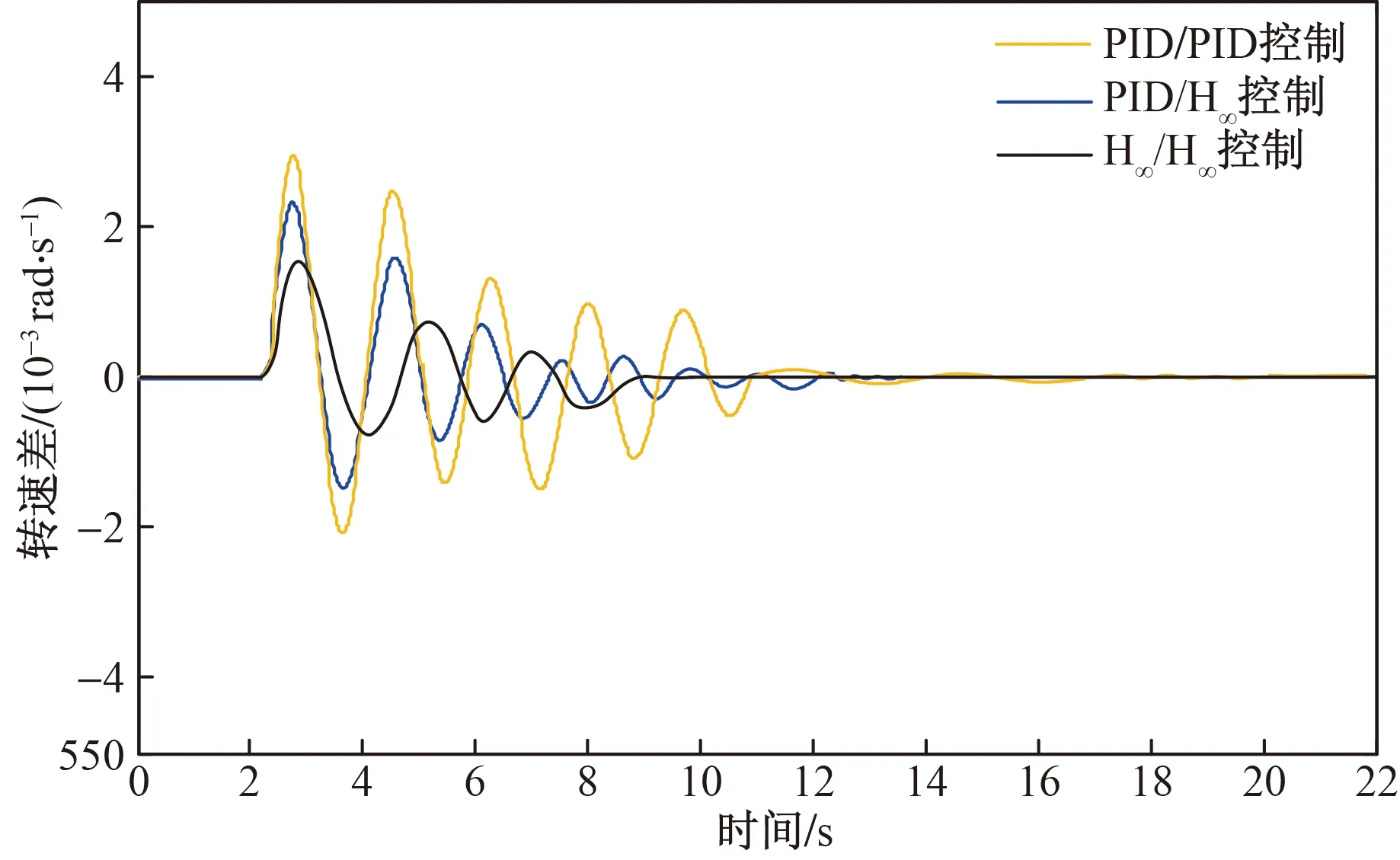
图13 光伏协同SVG附加控制G1、G3转速差响应Fig.13 Speed difference response of PV cooperative SVG additional control station G1、G3
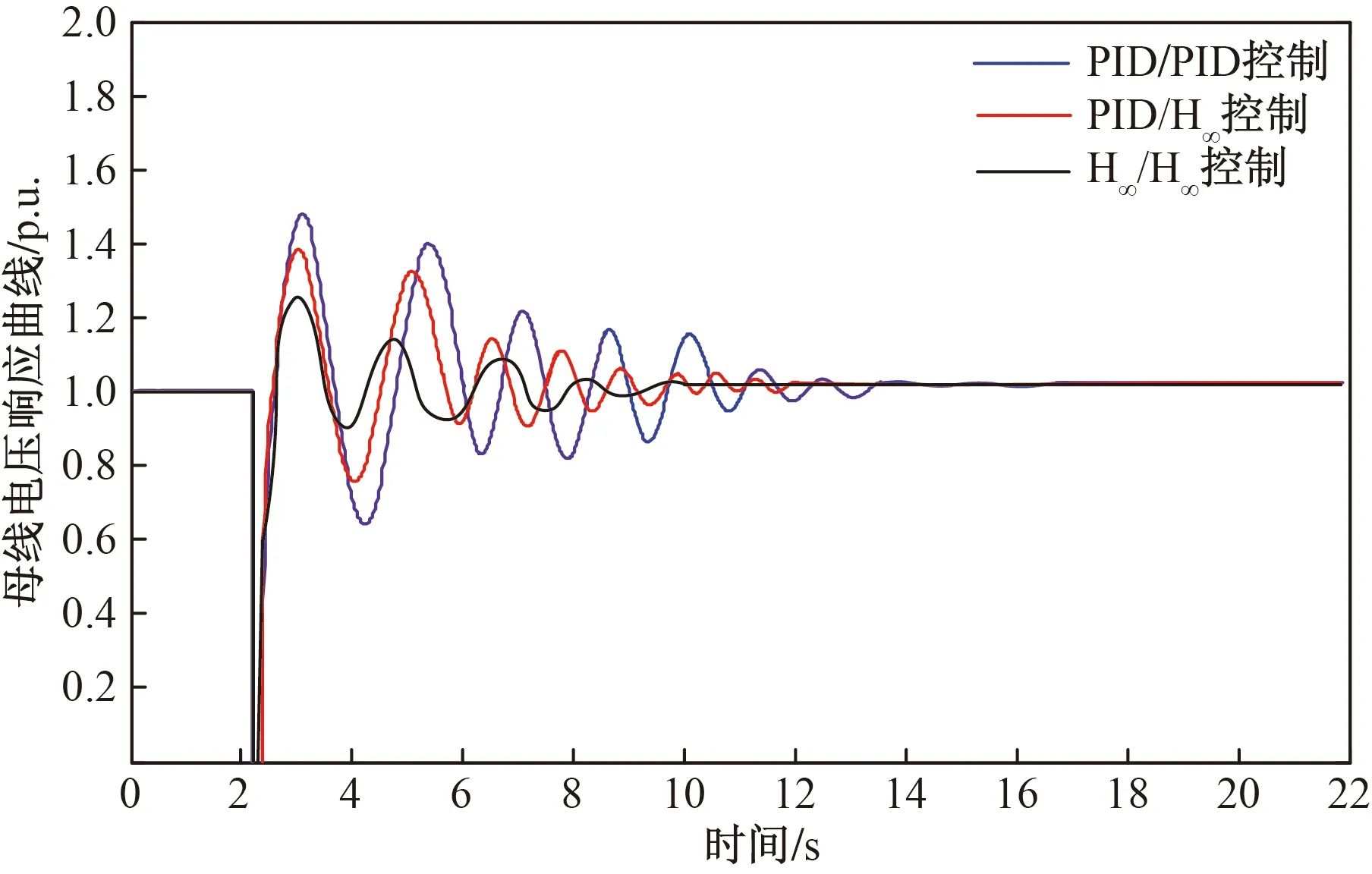
图14 光伏协同SVG附加控制并网母线电压响应曲线Fig.14 Voltage response curve of photovoltaic cooperative SVG additional control grid connected bus
3.4 光照突变下H∞附加阻尼控制验证
首先让系统在光照强度为1 500 W/m2的运行点工作,温度设定为25 ℃。在2 s时,光照强度增加5%,并在100 ms后恢复到初始值,验证不同控制方式下配备SVG的光伏电站并网系统的动态特性,分别对比了光伏电站在无阻尼控制、传统PID控制以及H∞控制方式下的并网稳定能力。
由图15、图16可知,并网光伏在附加控制时对接入系统的稳定运行能力均要优于无控制方式,相比较实际光伏工程现采用的PID控制模式,提出的H∞控制策略的性能接近传统控制方法,且应对系统波动响应的超调量更优,恢复到初始稳态运行水平的调节时间更短,从而为电网提供了坚强可靠的动态稳定支撑能力。
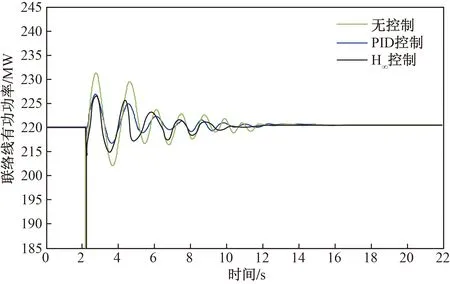
图15 光伏协同SVG附加控制联络线有功响应Fig.15 Active power response of PV collaborative SVG additional control tie line

图16 光伏协同SVG附加控制并网母线电压响应曲线Fig.16 Voltage response curve of photovoltaic cooperative SVG additional control grid connected bus
4 结论
本文推导分析了配置SVG的光伏并网系统提高阻尼特性的机理,结合NSGA-II算法优化H∞回路成形控制器权函数参数取值,设计了基于H∞控制理论的附加鲁棒镇定阻尼控制器并证明了抑制功率振荡的有效性,仿真表明,光伏、SVG附加H∞阻尼控制器均能够改善振荡系统阻尼特性,在降低功率初始波动幅度、缩短振荡时间等方面要优于传统PID控制器。针对配备SVG的光伏并网系统,光伏协同SVG附加H∞阻尼控制器抑制功率能力要明显强于单一控制模式,为提高新能源主动支撑并网系统稳定性提供工程参考。
猜你喜欢
科学技术创新(2022年33期)2022-11-12
数学物理学报(2021年4期)2021-08-30
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
模具制造(2019年4期)2019-12-29
山东冶金(2019年5期)2019-11-16
传感器与微系统(2019年8期)2019-08-15
制造技术与机床(2018年9期)2018-09-19
滇池(2017年5期)2017-05-19