
基于模型的无人机信道编码算法设计与实现
2023-08-12 03:40薛雨萌张可嘉
测控技术 2023年7期
薛雨萌, 张可嘉
(西安恒翔控制技术有限公司,陕西 西安 710065)
无人机测控系统[1]由数据链和控制站组成,用于地面控制站与无人机之间的数据收发与跟踪定位工作。数据传输的可靠性是保证无人机安全飞行的重要因素。然而,现今日益加剧的电子干扰对测控链路的抗干扰性能带来了严峻的考验。
正交相移调制(Quadrature Phase Shift Keying,QPSK)具有较高频谱利用率和抗干扰性能,是一种无人机测控链路常用的数字调制方式[2]。然而其自身的抗干扰性能无法弥补复杂干扰的无线信道对系统误码率的影响。信道编码[3]通过对信号进行冗余纠错编码,有效地提高了信号传输的稳定性,将其应用于QPSK系统中,能够有效提高系统可靠性,降低误码率,因此信道编码被广泛地应用于无人机测控链路设计中。
串行级联编码[4]是一种常用的信道编码方式。Han等[5]利用RS-CC(Reed-Solomon Convolution Concatenated Code)编码解决了无线信道在复杂环境中的突发错误和随机误码,在较小信噪比条件下,实现了较理想的误码率。姜智等[6]针对导弹数据链中的突发错误,提出了RS码+交织+卷积码的级联编码方案,提高了导弹数据链的抗干扰性能。循环冗余校验码(Cyclic Redundancy Check,CRC)[7]编码简单,易于实现、具有较强的检错能力。将其与级联编码结合,能够有效增强系统的检错能力,降低系统误码率。数据加扰[8]用一组伪随机码序列对数据加密,能很好地均衡噪声,提高系统的抗干扰性能。
为了进一步提升无人机测控链路的抗干扰性和可实现性,本文设计了一种基于模型的无人机测控系统信道编码算法。在RS码+交织+卷积码的串行级联编码的基础上,融入CRC编码,提升系统检错和纠错能力,同时将交织与数据加扰结合来进一步增强系统抗干扰性能。本文首先在MATLAB/Simulink中搭建了采用上述级联信道编码的QPSK系统模型,仿真结果表明,本系统在不同信噪比下,相比于常用的编码方式,均能够明显降低传输误码率,在不显著增加编码复杂度的情况下,有效提高系统的抗干扰性能。同时,该系统仿真模型可以直接部署在两台ADRV9361-Z7035上,实现两台设备间数据的正常收发,避免进行硬件代码编写,提升了无人机测控系统算法的可实现性,具有一定的工程实现价值。
1 信道级联编码调制算法原理
1.1 RS+交织+卷积级联编码原理
RS编码是一种线性分组码,具有很高的纠错能力和编码效率[9]。RS码采用(m,n,k)的编码结构,通过增加监督位的方式来保证传输的误码率。其中,输入信号中每个码元由m个bit组成;n为编码后的码字长度;k为信息位的长度。
信息位的一个bit或多个bit出现错误,RS码就会出现一个误符号。因此RS编码具有极强的纠正突发错误的能力。
卷积码是一种二进制非线性分组码,它不再将输入数据进行分组编码,而是将原始信息码全部打乱编码[10],具有较优的编码增益和数据传输效率。对于(n,k,N)卷积码,k个bit信息位编码成n个bit,但这n个bit不再只与当前的k个bit信息有关,还与其前面时刻的N-1个码组的信息位有关。这样的做法增加了码元之间的关联性,随着参数N的增大,卷积码的纠错能力也会随之加强,可以很好地解决随机错误。
交织技术是一种时间/频率扩展技术,在不增加冗余码的情况下,把突发错误离散成随机错误。从而交织技术在不增加带宽的情况下,提高系统的抗干扰能力,尤其是针对瑞利衰落信道中常出现的成串的比特差错,有更好的处理效果,改善系统在衰减信道的抗干扰性能。
在RS+交织+卷积级联编码方式中,RS作为外码,处理突发错误,卷积码作为内码,解决随机错误。编码时,RS编码后的数据由交织器[11]以矩阵形式重新排序,将突发错误在时间上扩散成随机错误,送入卷积编码处理,从而降低了对纠错编码纠错能力的要求。译码时,内码未纠正的单个bit错误和突发错误,将被外码译码转化成单个或多个符号错误,在其译码过程中再次进行纠正,从而进一步保证了其解决突发错误的能力。
1.2 CRC与加扰编码原理
CRC[12]属于线性分组码,其通过生成校验式在信息位后增添冗余位的方式对数据进行编码,译码时再利用校验式通过模2除法进行循环冗余校验,完成检错。CRC编码具有较强的检错性能,但其纠错算法复杂,效率过低,因此CRC通常仅被用于信号检错。将其与RS_CC编码结合在一起,能够有效提升系统的检错能力,进一步提高系统可靠性。
数据加扰[13]用一组伪随机码序列与原始信号相乘,打散信号的时间和频率,实现数据的加密,从而消除信号中长“0”或长“1”带来的同步干扰。加扰技术能够很好地均衡噪声,提高系统的抗干扰性能。在卷积编码前将数据进行加扰操作,能够将突发错误转换成随机错误,增强卷积编码效果。
1.3 QPSK性能指标
QPSK是一种四进制正交相移键控方法,利用载波的4种不同相位差来表征输入的数字信息。QPSK具有较高的频带利用率,且其电路也较容易实现,因此被广泛应用于测控系统数据链载波调制中。但是,QPSK是两路正交2PSK信号的叠加,各码元之间的距离较小,当其受到信道中的噪声与多径效应的干扰时[14],相干解调会变得困难,即接收端误码率会随之增大。QPSK调制系统需要引入信道编码技术,来保证其抗干扰性能。
1.4 串行级联编码算法复杂度分析
级联编码通过串联的方式,将两个较短码长的子码构成一个长码,并且其码率等于每个独立编码码率的乘积。通过级联的方式,RS-CC编码在增加码长的同时保证了更低的码率,使其在编译码过程中产生更小的误差。交织器本身不会产生冗余码,在不增加系统带宽的情况下提高系统抗干扰能力。因此,RS+交织+卷积级联编码系统的译码复杂度相比于单独编码也得到大幅下降。CRC编码自身的译码复杂度为O(n),远低于卷积编码,因此将其与RS+交织+卷积级联结合不会提高算法复杂度。
2 信道编码系统仿真与参数设计
2.1 系统整体设计
结合上述理论分析,本文为提升无人机测控系统抗干扰性能,设计了一种基于模型的无人机测控系统信道编码调制算法,如图1所示。
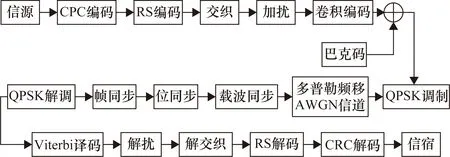
图1 基于模型的无人机测控系统信道编码调制系统框图
信源数据首先进行CRC编码,再进行RS+交织+卷积级联编码。内外码之间,在加入交织的基础上,在数据中加入扰码,进一步将突发错误扩散成随机错误。为了模拟飞行器高速飞行时的信道情况,编码后的信号经由QPSK调制在具有多普勒频移的AWGN信道中传输。然而,由于收发时钟间的频差,以及由于QPSK自身编码特性产生的接收端存在180°的“相位模糊”现象[15],导致原始信号不能直接用于QPSK解调,必须先依次进行信号的载波同步、位同步和帧同步。解调后的数据,再进行信道解码,并显示输出接收结果。根据本编码调制算法系统原理在MATLAB/Simulink中搭建的信道编码调制系统的仿真模型如图2所示。其中Bit Generation模块完成信源信号生成和串行级联信道编码。Phase/Frequency Offset与Delay Generation模块仿真多普勒频移现象,信号在AWGN信道中进行传送。QPSK Receiver模块实现接收数据的同步、解调与信道解码功能。

图2 信道编码调制系统仿真模型
2.2 信号发生器与级联信道编码子系统设计
Bit Generation模块内部结构框图如3(a)所示。首先消息生成器将信源中的字符转换成7位二进制码,得到固定帧长的比特数据,再进行信道级联编码。信道级联编码仿真设计如图3(b)所示。首先,信号进行CRC编码,提高信道检错性能。RS-CC级联码间加入交织器来扩散突发错误,结合数据加扰操作,再次均衡噪声带来的干扰,消除信号中长“0”或长“1”带来的同步干扰。

图3 信道级联编码原理框图与仿真设计图
各模块具体参数设置如下。
① 信源:采用固定帧长输出,每帧长度84 bit。
② CRC编码器:CRC Generator采用CRC-16生成多项式为
G(x)=x16+x12+x5+1
(1)
CRC在每帧数据后添加16位校验位,得到固定帧长100 bit输出。
③ RS编码器:采用Binary RS encoder模块。m,n,k值分别设置为5,20,10。可检测10个码元,纠正5个码元错误。
④ 交织器:采用Matrix Interleaver,按行读入,按列读出。根据RS输出帧长200 bit/f,行列数分别设置为20,10。
⑤ 扰码:Scrambler加扰多项式设置为[1 1 1 0 1]。
⑥ 卷积编码器:采用1/2码率的(2,1,7)卷积码,m,n,k值分别设置为7,2,1。卷积编码器之后加入缓冲区重新对数据组帧,并在每帧数据的起始位置加入13位的巴克码作为数据帧头,格式为(1 1 1 1 1 0 0 1 1 0 1 0 1),用于接收端数据的帧同步。最后,再利用Bernoulli Binary将每帧数据长度扩充至500 bit,用于QPSK调制。
调制信号进入信道之前,升余弦滤波器对波形进行整形,滤波器的滚降系数设置为0.5,并对信号进行4倍上采样来防止出现码间串扰。
2.3 多普勒频移AWGN信道设计
信道模型中利用Phase/Frequency Offset与Delay Generation模块仿真无人机在空中盘旋飞行状态下的多普勒频移现象。Phase/Frequency Offset设置频率偏移为5000 Hz,相位偏移为47°。Delay Generator以0.05为间隔,在[0,8]区间内先递增后递减循环输出频率和相位延迟信号。AWGN采用SNR信噪比模式,输入信号功率为0.25 W。
2.4 QPSK信号接收子系统设计
在QPSK接收机模块集成了信号同步解调和信道译码两个子模块。接收机对信号完成解调后,再对其进行信号译码,其内部结构框图如图4(a)所示,仿真设计图如图4(b)所示。

图4 信号接收子系统原理框图与仿真设计图
2.4.1 载波同步子系统设计
由于多普勒偏移导致接收信号存在高动态范围的载波频率偏差,会导致接收的QPSK调制信号失步,无法解调,系统误码率严重恶化。因此必须在信号解调前对载波信号进行同步。
考虑到接收信号强度会随着信道传输发生变化,为了保证后续的载波和位同步参数固定并提升同步精度,在匹配滤波之前,首先利用自动增益控制(Automatic Gain Control,AGC)稳定调制信号幅度。AGC设置输出功率为0.25,步长为0.01。升余弦滤波器调制信号进行2倍降采样,滚降系数为0.5。
载波同步首先对接收信号频率进行捕获,即载波粗同步,对应图4(b)所示的Coarse Frequency Compensation模块。粗同步使用FFT频偏补偿[16]的方法,首先对调制信号相位进行4倍频来消除调制相位。之后FFT利用最大似然法对载波频偏变化进行估计。
载波跟踪,即载波精同步,对应图4(b)中的Fine Frequency Compensation模块,其内部结构如图5(a)所示。载波跟踪采用二阶数字锁相环,由相位误差检测器(Phase Error Detector,PED)、环路滤波器(Loop Filter)和直接数字合成器(Direat Digital Syntheslzer,DDS)构成,其仿真设计原理如图5(b)所示。鉴相器PED测量到的固定时间间隔内载波相位变化量,经过环路滤波器后,反馈给DDS来改进频率步进间隔,得到高频率分辨率的本地载波,对接收载波频率变化量进行跟踪。环路滤波器设置归一化带宽为0.06,阻尼系数为2.5,可以在引入较小相位噪声时快速锁定到目标相位。
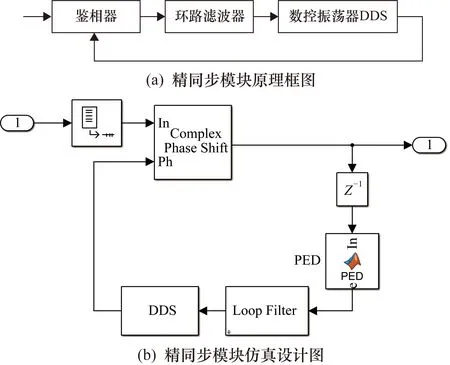
图5 精同步模块原理框图与仿真设计图
2.4.2 位同步子系统设计
位同步子系统,即如图4(b)中所示的Timing Recovery模块,仍采用数字锁相环方式[17],其内部结构如图6(a)所示,仿真设计原理如图6(b)所示。
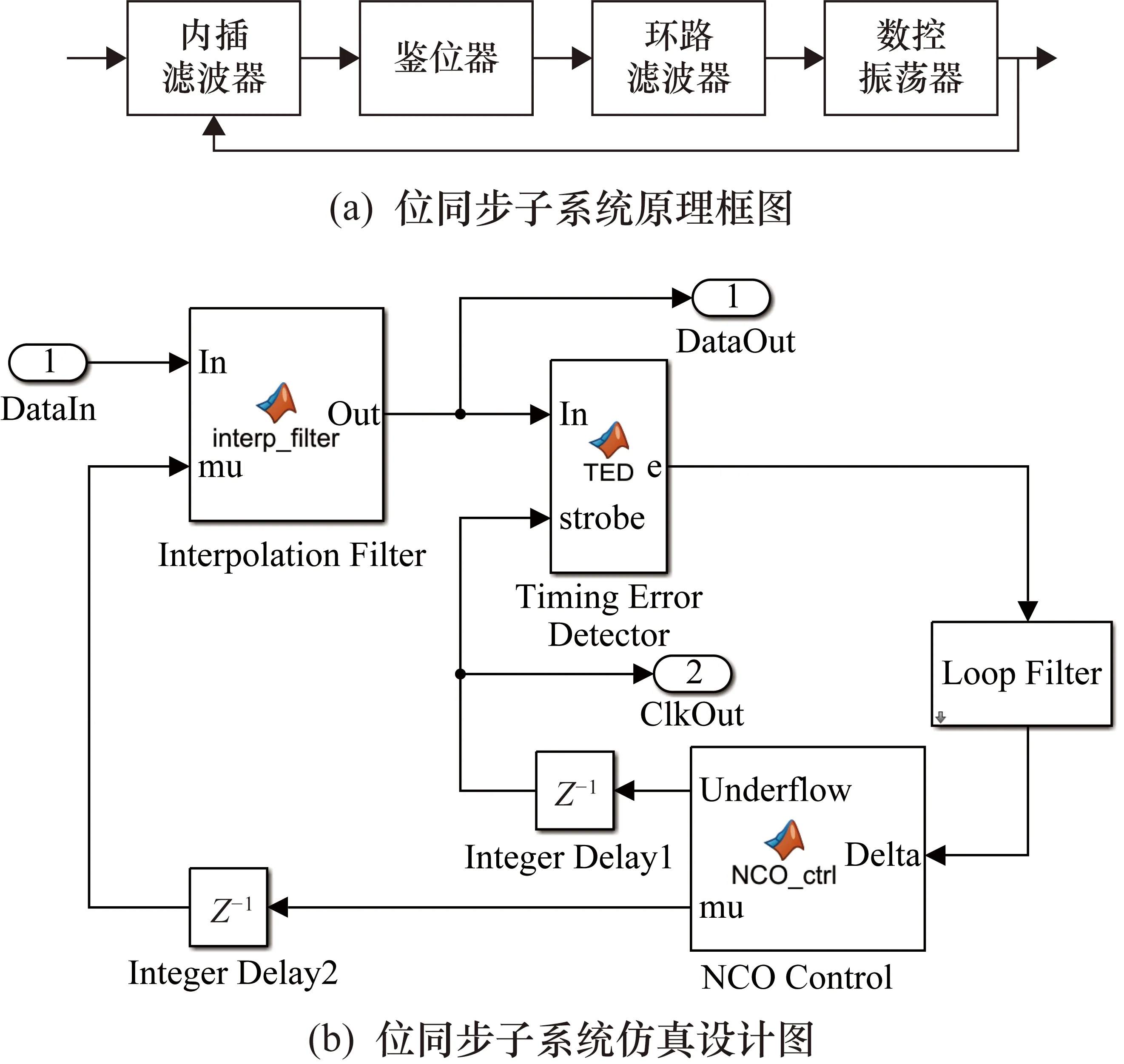
图6 位同步子系统原理框图与仿真设计图
NCO Control模块产生控制信号,为Timing Error Detector(TED)模块提供有效的时间误差检测位置,从而更新内插滤波器(Interpolation Filter)中的时间误差,找到正确的内插位置。Interpolation Filter采用Farrow Parabolic滤波器。TED的输出送入环路滤波器,滤波后反馈给NCO Control更新时间误差。环路滤波器的环路带宽设置为0.01,阻尼系数为1,即临界阻尼状态。
另外,为了后续信号进行帧同步,位同步需要对输出信号进行缓存,每次缓存一帧长数据。位同步模块同时提供DataValid信号,用于触发帧同步模块,保证其在位同步有效的情况下工作。
2.4.3 帧同步与解调子系统设计
图4(b)中的Data Decoding子系统实现信号的帧同步、“相位模糊”解算和解调功能,其内部结构框图和仿真设计原理图分别如图7(a)和图7(b)所示。Compute Delay模块每次输入一帧数据,与调制后的巴克码元进行求自相关操作,根据相关峰峰值确定帧头位置后,输出数据给Align Data。Align Data每次缓存两帧长数据,利用帧头索引定位,输出帧同步后完整的一帧数据。
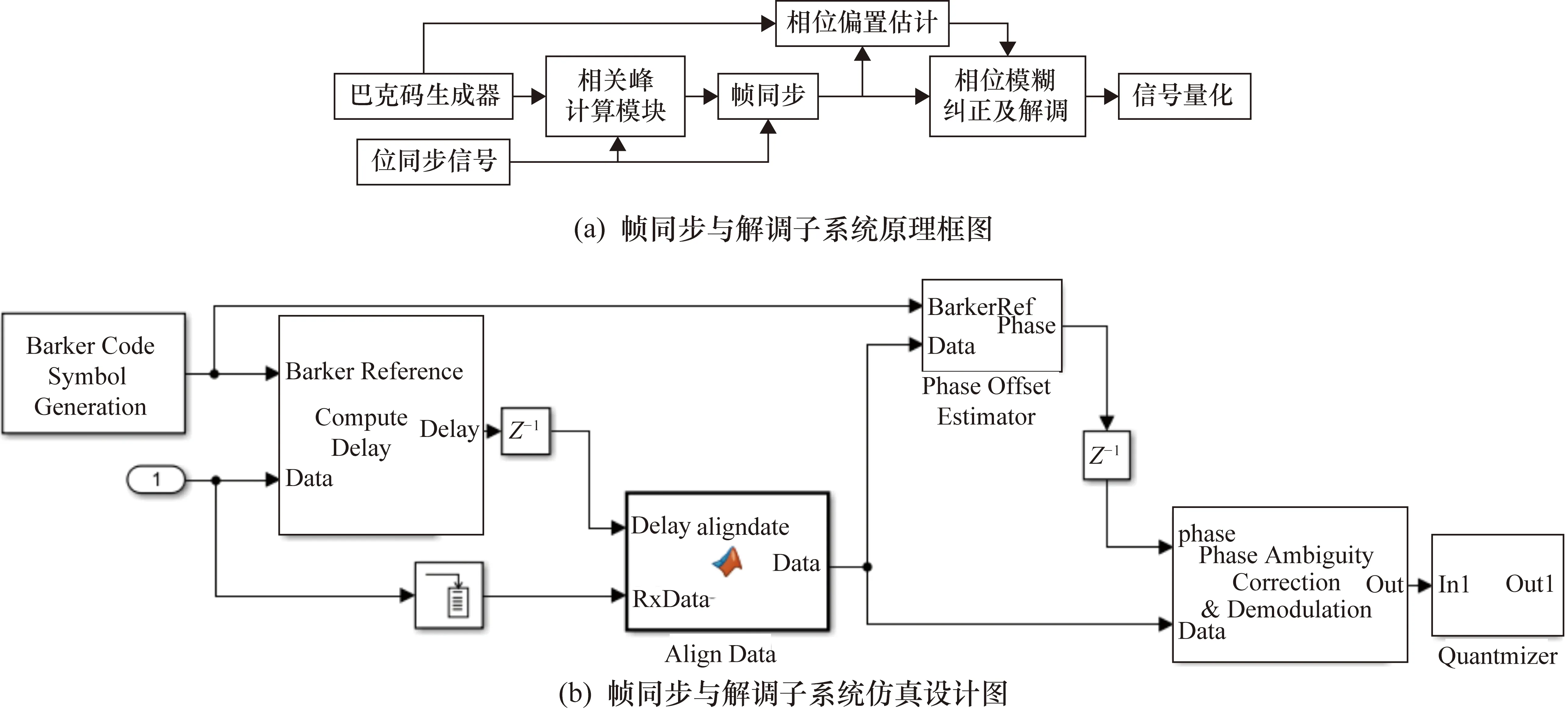
图7 帧同步与解调子系统原理框图与仿真设计图
精同步后的载波相位存在0°、90°、180°或270°的相位偏移,从而造成QPSK解调时会出现“相位模糊”的现象。Phase Offset Estimator模块计算接收信号中巴克码和原始巴克码之间的相位偏差。Phase Ambiguity Correction &Demodulation根据相位偏移量纠正信号相位后,对其进行解调。QPSK Demodulator采用log-likelihood ratio判决,bit形式输出。Quantizer在[-3,3]区间内对输出数据进行量化,用于Viterbi软判决解码。
2.4.4 串行级联信道解码子系统设计
该子系统设计是信道编码子系统的逆向设计。解调信号经Viterbi译码后,再进行数据解扰与解交织,最后完成RS解码和CRC译码。Viterbi译码的判决方式设置为软判决,判决比特数为3,回溯深度设置为200,其余模块参数设置与编码器保持一致。系统利用Error Rate Calculation模块统计接收数据误比特率,计算模式为Entire Frame模式,由于卷积编码的回溯长度会造成时延,计算时延设置为200,接收时延为0。
3 系统性能测试与分析
3.1 实验设置
本次实验分为两个部分。第一部分一共设计了5组QPSK系统模型,分别为未编码、RS(20,10)编码、(2,1,7)卷积编码、RS(20,10)+交织+(2,1,7)卷积级联编码,以及本文提出的串行级联编码的QPSK系统模型。信源发生器均生成固定字符串“Hello World!”,发射机采样率为1.92e-6。为了使接收比特数达到10e-6数量级,所有模型的仿真时间均设置为40 s。改变AWGN信道的信噪比,比较不同信噪比情况下的误码率。
在第二部分的测试中将系统置于瑞利衰减信道中进行数据传输,信号发生器传输的数据、发射机采样率和仿真时间均与第一部分的实验设置保持一致。改变信道信噪比,统计系统在衰减信道中传输的误码率。
3.2 误码率分析
3.2.1 AWGN信道误码率分析
为了测试系统在不同信噪比下的抗干扰性能,AWGN信道的信噪比分别设置为-2~10。运行仿真模型,统计5组仿真模型的误码率,其部分结果如表1所示。

表1 不同信噪比下未编码和4种信道编码的QPSK系统误码率统计结果
由表1可以看出,误码率在10e-5数量级下,串行级联编码系统编码增益可达到5 dB。这说明在外界干扰较大时,本文信道编码方法可以有效改善QPSK系统的抗干扰性能。
另外,根据统计结果绘制了5组系统的误码率对比图,信噪比变化范围为2~10 dB,如图8所示。由图8可以看出,本文信道编码方式在不同信噪比条件下均能够有效降低误码率,并且在小信噪比条件下,其抗干扰性能提升更加显著。同时,加入CRC编码后,系统的抗干扰性能明显得到了提高。

图8 5种信道编码QPSK系统的误码率对比图
3.2.2 瑞利衰减信道误码率分析
为了测试系统在多径干扰下的抗干扰性能,并且验证交织技术对于增强系统在瑞利衰减信道中传输可靠性的效果。将瑞利衰减信道的信噪比变化范围设置为2~10 dB,分别统计系统在使用与不使用交织技术后,经过瑞利衰减信道后的传输误码率。
根据统计结果,绘制了系统在瑞利衰减信道下和在AWGN信道中传输的误码率对比图,如图9所示。
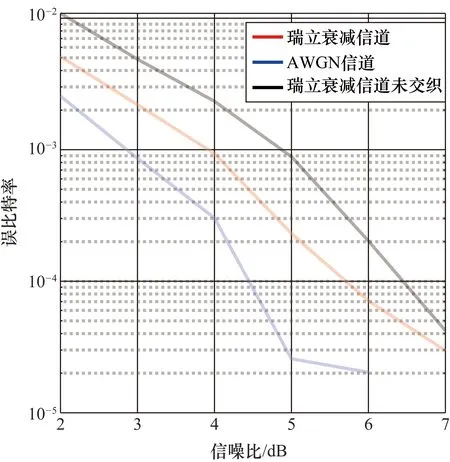
图9 瑞利衰减信道与AWGN信道中系统误码率对比图
由图9可以看出,系统在瑞利衰减信道中的传输误码率明显高于AWGN信道,这是由于瑞利信道的多径干扰和频率选择性衰减造成的。但是系统在瑞利衰减信道中的抗干扰性能并没有大幅度恶化,在信噪比为6 dB的情况下,系统误比特率可以达到10e-5数量级。
同时,从图9中可以看出,系统经过交织编码,在瑞利衰减信道中的传输误比特率有了明显的下降趋势。这说明交织技术能够有效改善系统在瑞利衰减信道中的抗干扰性能。
3.3 硬件实现
在硬件开发平台上对系统模型进行了实际效果测试。硬件平台采用ADI公司生产的ADRV9361-Z7035开发板,其内部集成了AD9361射频捷变收发器与Xilinx Z7035可编程SoC。
将上文的信道编码调制系统拆分为QPSK Transmitter与QPSK Receiver两个子系统,其仿真设计图分别如图10和图11所示,均布署在两台ADRV9361-Z7035开发板上。

图10 QPSK Transmitter子系统仿真设计图
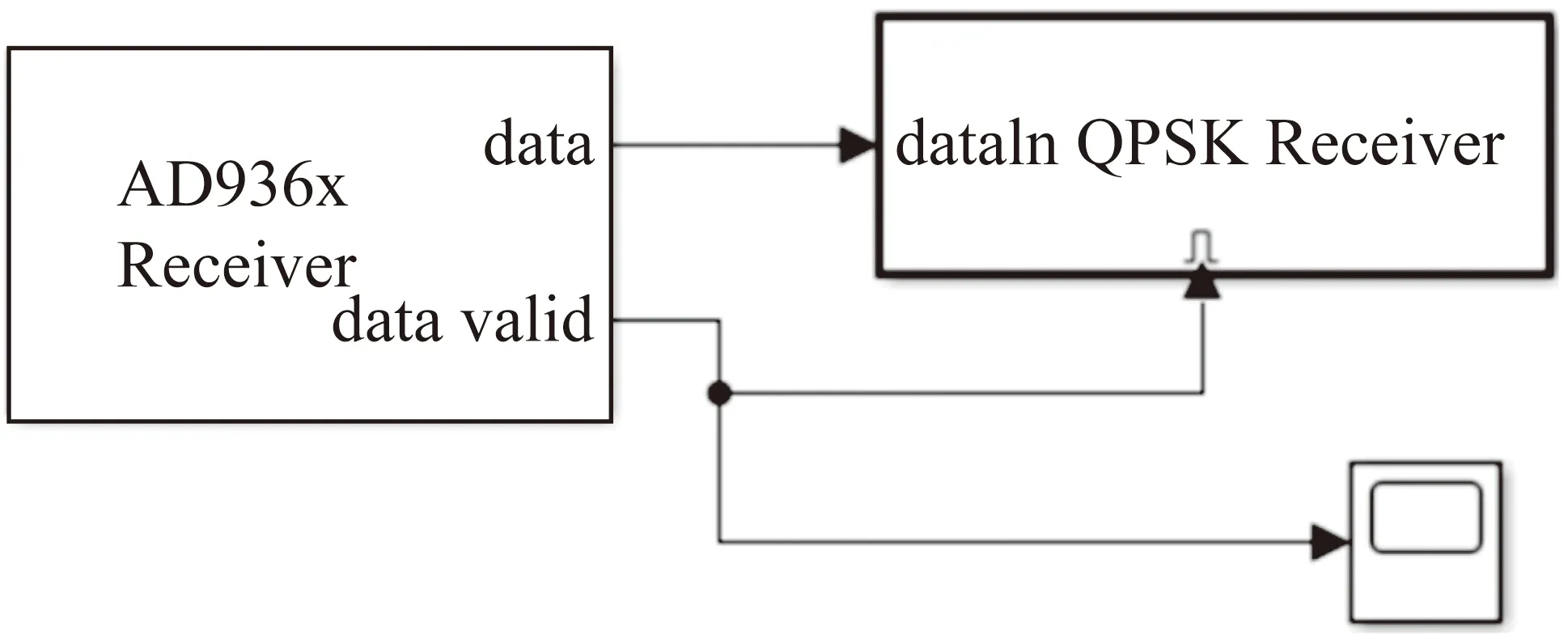
图11 QPSK Receiver子系统仿真设计图
发送端的QPSK Transmitter子系统首先在Bits Generation中进行信道级联编码,再完成QPSK调制,并利用buffer模块对数据进行缓存,逐帧输入到AD936x Transmitter模块,获得可通过天线传输的射频信号。
接收端的QPSK Receiver子系统接收到天线传输信号后,送入AD936x Receiver模块处理,将射频信号转换成QPSK调制信号,并通过data valid为QPSK Receiver模块提供使能信号,保证其在调制信号有效的情况下进行解调。
AD936x Transmitter和Receiver的基带采样率为520841 Hz,IP地址为192.168.3.2,与射频模块的硬件IP地址保持一致。Transmitter的发射增益为-10 dB。ADRV9361-Z7035开发板采用双通道全双工对通测试,每个通道配置一根天线,天线频率分别为1430 MHz和860 MHz。两块射频开发板均通过网线分别与两台主机连接。进行硬件对通测试时,两台主机均首先运行QPSK Transmitter,再运行QPSK Receiver。主机1的发射和主机2的接收频率为1430 MHz,主机1的接收与主机2的发射频率为816 MHz。进行两台设备间的全双工对通测试。
接收到的数据会通过以太网利用UDP回传给主机,显示实际接收结果。接收端的显示输出如图12所示,统计当前接收到的数据帧和误码率。由于接收端存在时延,在进行误码率统计时,在Error Rate Calculation模块上加入一个enable信号,在有效信号到来时,激活该模块开始统计当前误码率。从接收端输出结果可以看到,本系统传输误码率可以稳定在0.1%左右,当CRC检测到误码时,系统会丢掉该帧,并显示 “error!”对用户进行提示。
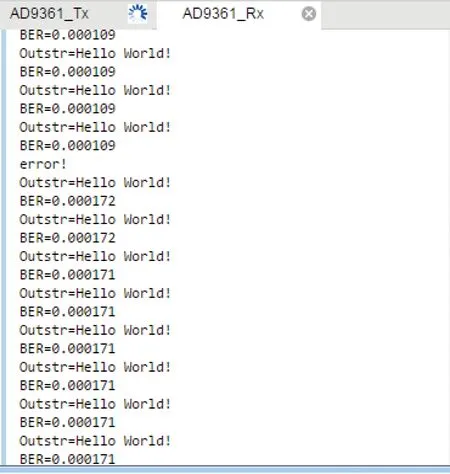
图12 实际接收结果
对通测试结果表明,将本系统部署在硬件平台上,可以在保证误码率的情况下实现两台射频设备间正常的无线通信。本算法可以直接将模型部署在硬件设备上,大幅减少了硬件语言开发工作量。将其应用到无人机测控系统中,具有一定的工程实现价值。
4 结束语
为了提高无人机测控系统的抗干扰性能,降低误码率,提出了一种基于模型的无人机测控系统信道编码调制算法。在QPSK系统中,采用CRC-16+RS(20,10)+交织(20,10)+卷积码(2,1,7)的串行级联编码方式,并辅以数据加扰技术增强信号传输抗干扰性能。仿真结果表明,本系统在不同信噪比条件下均能够显著降低误码率,尤其在小信噪比条件下,效果更加明显。在误码率达到10e-5数量级时,系统编码增益达到5 dB,有效改善了QPSK系统的抗干扰性能。并且本系统模型能够直接部署在射频收发设备上,在保证误码率的情况下实现两台设备间正常的无线通信。相比于现有硬件实现方法,基本免去了硬件代码开发的工作。将其部署在无人机测控系统中,具有一定的工程实现价值。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31
装备维修技术(2020年3期)2020-11-20
数字通信世界(2019年3期)2019-04-19
通信产业报(2018年27期)2018-11-25
祖国(2016年20期)2016-12-12
西部广播电视(2015年6期)2016-01-16
单片机与嵌入式系统应用(2014年7期)2014-03-24
铁路通信信号工程技术(2014年3期)2014-02-28
测绘科学与工程(2013年5期)2013-03-11
