一种调频广播信号辅助PDR的室内定位技术
2023-08-26 03:06田婧楠秦红磊
导航定位学报 2023年4期
田婧楠,丛 丽,秦红磊
一种调频广播信号辅助PDR的室内定位技术
(北京航空航天大学 电子信息工程学院,北京 100191)
针对室内定位系统中现有的行人航位推算(pedestrian dead reckoning,PDR)方法存在加速度计适用性较差,以及基于惯性和磁传感器的航向估计易受器件误差和磁场环境的影响,导致精度较低的问题,在不增加基础设施成本和现场勘察工作的前提下,提出一种调频(frequency modulation,FM)广播信号辅助PDR的室内行人定位技术:在传播模型理论基础上探究FM信号接收信号强度指数(RSSI)与步长的关系,将其与加速度组合以提升步长估计的适用性;然后通过分析FM信号在直线/转弯运动模式下的变化,将其与角速度组合以提升模式识别准确率,并使用模式识别结果约束航向漂移误差;最后,综合步长与航向估计结果实现定位。实验结果表明,引入FM信号后定位误差均值可分别减小36.1%、78.9%。
室内定位;行人航迹推算(PDR);运动模式识别;无线电信号;调频(FM)信号;接收信号强度指数(RSSI)
0 引言
近年来,室内定位的市场需求日益增大。根据室内定位技术的全球领导者Indoor Atlas(意为室内地图)公司的研究报告,参加调研的301家机构、单位中,99%的受访单位已经或计划安装室内定位系统。虽然室内定位的市场规模迅速增长,然而,仍没有发展形成室外定位网络的规模,原因在于现有方法实现的一些前提如需要大量站点的部署、指纹库的提前构建、依赖室内地图等比较理想化,在现实环境中难以满足。因此,兼备低成本、高精度、高适用性的室内定位方法是目前室内定位领域的主要研究目标。
当前主流的室内定位系统包括基于匹配的系统[1]、基于测距/测角的系统[2]、视觉导航系统[3]、行人航迹推算(pedestrian dead reckoning,PDR)系统[4]等。其中,PDR具备自主性强、成本低、数据更新率高、功耗低、可靠性高等优势。因此,从成本以及对未知环境适用性的角度考虑,本文以PDR为基础进行研究。
PDR基于人的行走特性,通过步数检测、步长估计与航向估计实现定位。尽管针对PDR已有大量研究,其仍存在一些缺陷。首先,现有的步长估计方法通常通过构建步长与加速度变量的函数关系实现[5-9]。然而,加速度计易受人的运动速度与习惯、携带方式的影响,因此如何提升其适用性是难点之一。其次,基于惯性和磁传感器的航向估计容易受到器件误差与磁场环境的影响,难以满足高精度定位的要求。
为了提高定位精度,一些研究使用零角速修正来约束航向漂移误差[10-11]。这类方法虽然精度较高,但需要将传感器绑定在脚上,难以适用于手持等更日常的携带方式。另一方面,建筑物内走廊之类的众多路径呈直线形状,并且人们也倾向于走直线,这种直线特征可用于减小航向误差[12-14]。这类方法对于直线/转弯运动模式识别的准确率要求较高。然而,现有的大部分方法只使用加速度、角速度等惯性传感器特征来识别不同模式,存在准确率低、适用性有限的问题。
将PDR与其他信息如无线电信号进行融合能够有效提升定位性能[15-16]。常用的信号包括无线保真(wireless fidelity,Wi-Fi)、蓝牙、超宽带(ultra-wide bandwidth,UWB)、调频(frequency modulation,FM)等。其中,FM广播是当前主要的无线广播信号体制,在汽车、手机上有着广泛应用。现有的大部分智能手机都安装了FM信号接收芯片,这就为其应用提供了便利。与其他信号相比,FM信号具备很多优势。正如微软公司所总结的:相比于高频信号(如Wi-Fi等),FM信号的工作频率较低,其波长与普通的室内设备的尺寸相当,更不容易受到室内物体、人员走动的影响;覆盖范围广,即使在地下室也可以接收到;广播站覆盖率较高,无须额外架设发射信号基站[17-18]。FM信号具备的上述特殊优势使其满足低成本、高适用性的需求,因此,本文将FM信号与PDR进行组合实现定位。
当前,大部分PDR/无线电信号组合系统通过融合PDR与指纹/几何定位技术或借助地图以提高定位精度,然而,上述技术仍依赖于指纹库的提前构建、节点的大量部署或建筑的先验信息。因此,需要探究更具备适用性的组合方式。一方面,本文对室内环境下FM信号的传播特性进行分析,利用传播模型探究信号接收信号强度指数(received signal strength indicator,RSSI)与步长间的关系,在此基础上将其与加速度计、磁力计进行组合以提升步长估计性能。另一方面,分析直线/转弯模式下信号RSSI的变化差异,利用此特点将其与角速度特征组合以提升模式识别准确率,并使用模式识别结果对航向漂移误差进行约束,在提升定位精度的同时保证对于手持、绑在腰上等非足绑式方式的适用性。
本文设计一种FM广播信号辅助PDR的室内行人定位技术:首先介绍多特征组合的步长估计算法;然后介绍直线/转弯运动模式约束的航向估计算法;最后,利用步长、航向与定位实验对所提算法的有效性进行验证。
1 多特征组合的步长估计算法
步数检测是步长估计的基础。本文通过一种综合过零检测、阈值检测与时长约束的方法对导航系轴加速度进行处理,实现步数检测[19]。
在步数检测的基础上,对每一步的长度进行估计。首先给出多特征提取算法,然后在此基础上设计支持向量机回归(support vector regression,SVR)模型估计步长。
1.1 特征提取
1)加速度特征。通常而言,步长越长,运动会越剧烈,相应的加速度特征如标准差、最大值与最小值之差等的值就会越大。因此,加速度方面,本文提取了加速度幅值最大值与最小值差值、加速度幅值标准差以及前进方向加速度最大值与最小值差值。
然而,不同人的行走习惯、不同携带方式等都会对加速度特征值产生影响,且器件测量噪声也会引入误差,因此只用加速度特征是不可靠的。
2)磁场强度特征。除了加速度特征外,磁场强度特征也可以用于估计步长。当行人行走速度较快时,周围环境的磁场变化倾向于更大。因此,磁场强度方面,本文提取了磁场强度幅值标准差、最大值与最小值差值以及窗内首尾差。
3)FM广播信号特征。FM信号入射到建筑物的外墙时,一部分信号将会产生反射,另一部分将折射进入墙体,在墙体内传输后再进入室内。信号在墙体内的传播损耗主要是由于墙体的电导率引起的。常用墙体的材质有混凝土、砖、玻璃、木材等,几种材质的电导率排序如下:混凝土>砖>木材>玻璃。因此,玻璃材质的窗户是FM信号进入室内的主要入口。而通过大量的数据验证发现,除了窗户以外,建筑的出入口如地下停车场入口也是FM信号进入室内的主要通道。


由式(1)可知,随着与信号源距离的增大,信号强度减小,即每个位置的信号强度都不同。图1模拟了一个特殊场景,窗户位于建筑的边沿上。由图可知,RSSI的变化与距离变化有一定的对应关系,距离变化越大,对应的RSSI变化越剧烈。
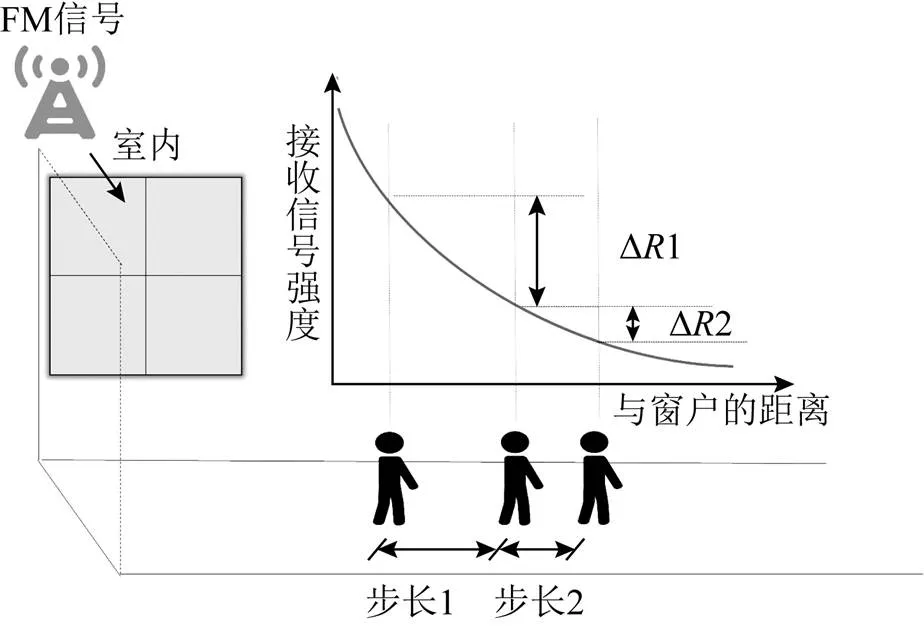
图1 FM信号特征提取原理示意
为了验证上述理论,本文在2个不同场景进行了实验。场景一为走廊场景,如图2所示。该场景的特点是走廊中央有几扇窗户。图2的下方曲线是从走廊起点走至终点过程中实际测量的FM信号RSSI的变化曲线。由图可知,呈现出先增大后减小的趋势,且不同步长对应的RSSI变化和变化程度不同,步长与RSSI变化程度呈正相关关系。

图2 场景一及其实测FM信号RSSI变化
除了窗户外,建筑出入口也是FM信号进入室内的主要通道。第二个场景位于北航新主楼地下一层的停车场入口附近。测试路线的起点在入口附近,实验人员从入口走到该场景的深处。如图3所示为场景二与实测FM RSSI的变化情况。由图可知,随着行人与入口之间距离的增加,RSSI迅速减小,步长与FM-RSSI的变化呈正相关关系。
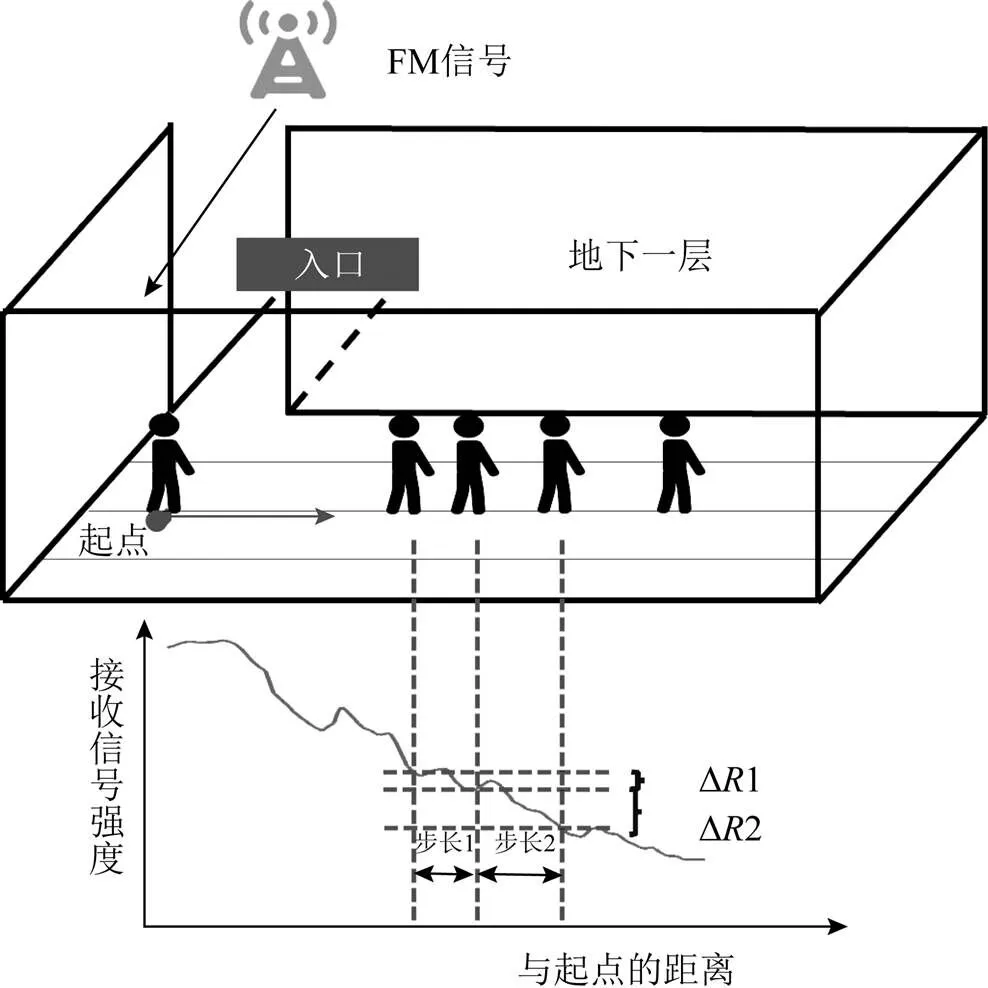
图3 场景二及其实测FM信号RSSI变化
基于上述分析,本文提取FM信号特征以估计步长。如图4所示为展示了2种步长下的RSSI标准差变化,其中,步长1为0.6 m,步长2为0.9 m。由图可知,随着步长的增大,此特征值倾向于更大。
FM信号特征方面,本文提取了FM信号的标准差以及功率谱振幅的均方频率等2个特征。
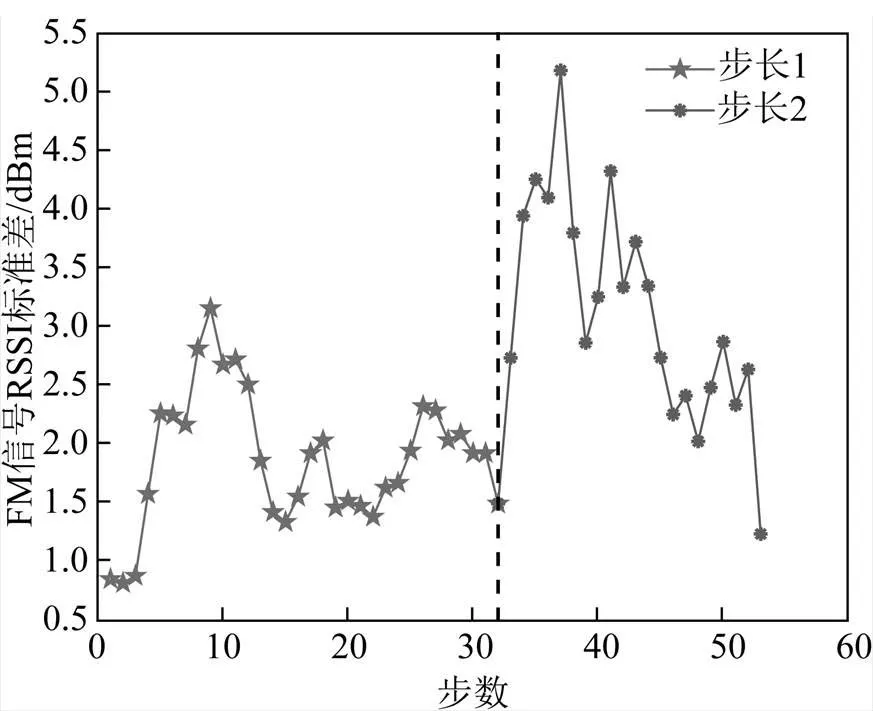
图4 2种步长下FM信号RSSI标准差的变化
1.2 基于支持向量机的步长估计

图5 SVR工作流程
SVR的使用具体包括训练阶段与预测阶段2个部分。训练阶段的输入为训练集数据的特征集以及真实步长,输出为训练模型;测试阶段使用训练模型预测测试集数据的步长。因此,训练模型会直接影响步长估计的性能。目前基于机器学习或者深度学习的步长估计方法虽然普遍获得了较好的预测精度,但是需要较多的训练数据,前期工作量大,难以实用化。针对上述问题,本文通过分析不同行走速度以及不同人的特征变化,设计了较为实用的训练集数据构成方式。
训练集数据的构建有2个原则:首先,为了减少前期工作量,应使用较少的数据;其次,为了提高训练模型的推广能力,应该尽量涵盖测试集数据的数值范围。
本文对训练集数据进行选择,结合性别不同、身高与体重差异最大的2位实验人员的数据,且各包含极限慢速、极限快速以及中速这3种速度的数据。后续在实验测试部分将具体展示此模型的预测性能。
2 运动模式约束的航向估计算法
为了提升航向估计的性能,本文在直线/转弯模式识别的基础上对加速度计、磁力计与陀螺仪进行融合。
2.1 直线/转弯运动模式识别
角速度常用于识别上述2种状态,原理在于,直线阶段航向角变化较小,角速度也较小,而转弯阶段的姿态角迅速变化,角速度会有明显的波动。然而,低成本陀螺仪的测量噪声较大,当转弯弧度较小时,角速度的变化会淹没在噪声中,容易造成误判。图5展示了轴角速度的变化,其中虚线代表真实分类标签,1为直线状态,0为转弯阶段。由图可知,传感器测量噪声使得角速度即使在直线阶段也有一定的波动。
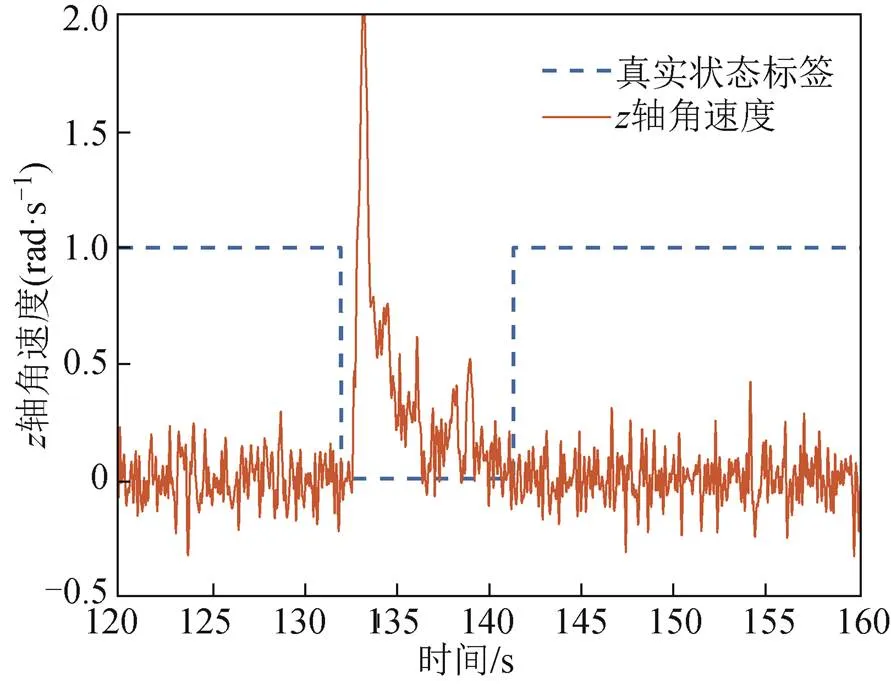
图6 直线/转弯状态下z轴角速度变化
为了弥补角速度特征的缺陷,本文引入FM信号特征。根据我们之前的工作[19],FM信号在室内的传播会受到建筑结构的影响,而拐角处往往伴随着结构的迅速变化,如出现墙壁、窗户等。因此,对于拐角处建筑结构发生迅速变化的场景,FM信号特征在直线/转弯状态下有一定区别,能够用于提升识别性能。
具体而言,当拐角处出现墙壁时,行人转弯时先接近墙壁,再远离墙壁,根据式(1),此时RSSI呈现出先减小后增大的变化;若拐角处出现窗户,行人先靠近窗户,再远离窗户,因此转弯时RSSI呈现出先增大后减小的变化趋势。
由于不同地点FM信号RSSI取值范围不同,因此本文先对RSSI进行标准化,以将不同地点的RSSI调整至相同尺度,即


如图7所示为拐角处出现墙壁或者窗户等2种情况下标准化后RSSI的变化。由图可知,无论是哪种情况,直线阶段大部分时刻的RSSI绝对值都在0~1之间,而转弯阶段的RSSI绝对值大于1。

图7 直线/转弯状态下FM信号RSSI变化
在上述分析的基础上,设计阈值法组合角速度与FM信号特征以提升识别性能。具体为


2.2 运动模式识别约束的航向估计
在运动模式识别的基础上,本文设计无迹卡尔曼滤波(unscented Kalman filter,UKF)模型组合加速度、角速度与磁场强度估计航向。
选取的状态量为四元数,即

一步状态转移方程为

其中

在运动模式识别的基础上,分情况得到观测量,以约束航向漂移。
1)在转弯阶段,观测量仅为三轴加速度与三轴磁场强度矢量。即有

观测方程为
2)若为直线阶段,此时行人航向角几乎是稳定不变的,可以应用直线特征来估计航向。具体是,先使用情况1)的方法实现更新,在此基础上,计算当前直线阶段更新后航向角的均值作为观测量以约束航向,即:
观测方程为
值得注意的是,直线/转弯的状态切换边界难以得到完全准确的区分,这种误判可能会引入航向误差。为了减小这种误差,直线特征并非在判断为直线状态的第一个时刻直接使用,而是在直线状态持续了1 s后开始使用,以避免“假直线状态”的负面影响。
3 实验与结果分析
实验数据采用内置了加速度计、磁力计、陀螺仪和FM接收芯红米手机来采集。
3.1 步长估计算法验证
为了验证算法的精度与适用性,实验由9位实验人员在北京航空航天大学的4个不同建筑内9个地点实施。实验人员、实验地点的信息分别如表1、表2所示。由表可知,实验人员身高、体重差异较大,实验地点则包含有无窗户的地上、地下场景。实验过程中,采用手持、绑在腰上以及放在裤兜等3种携带方式。

表1 实验人员参数

表2 实验地点信息
数据采集包括训练集数据和测试集数据。训练集数据由实验人员1与2在建筑1内一个地点采集得到,采集过程中2位实验人员以极限慢速、中速和极限快速这3种速度沿37.2 m长的路径行走,包含6组数据。测试集数据则在4个建筑内的9个地点采集得到,包含2个周围没有窗户的地下场景。每位实验人员均采集多组至少包含4种不同速度的数据。采集过程中,实验人员尽量保持匀速,当以恒定速度行走时,其每一步的步长大致相同,通过将真实距离除以步数即可以获得真实步长。真实行走距离则使用精度为0.1 mm的激光测距仪测量得到。
本节分别分析模型对于不同人、不同地点的性能。
1)对于不同人适用性。步长会受到人身高、体重等因素的影响。图8展示了不同人的步长估计结果,这里对SVR-有FM法与SVR-无FM法进行比较,二者的差异在于是否使用了FM信号特征来估计步长。如图所示,不同人的步长估计性能差异较大,而FM信号特征的引入在一定程度上弥补了人的差异所带来的负面影响。SVR-FM法下9位实验人员的步长平均误差为3.2 cm,相比SVR-无FM法减小了57.8%。上述结果证明了算法对于不同人的适用性。
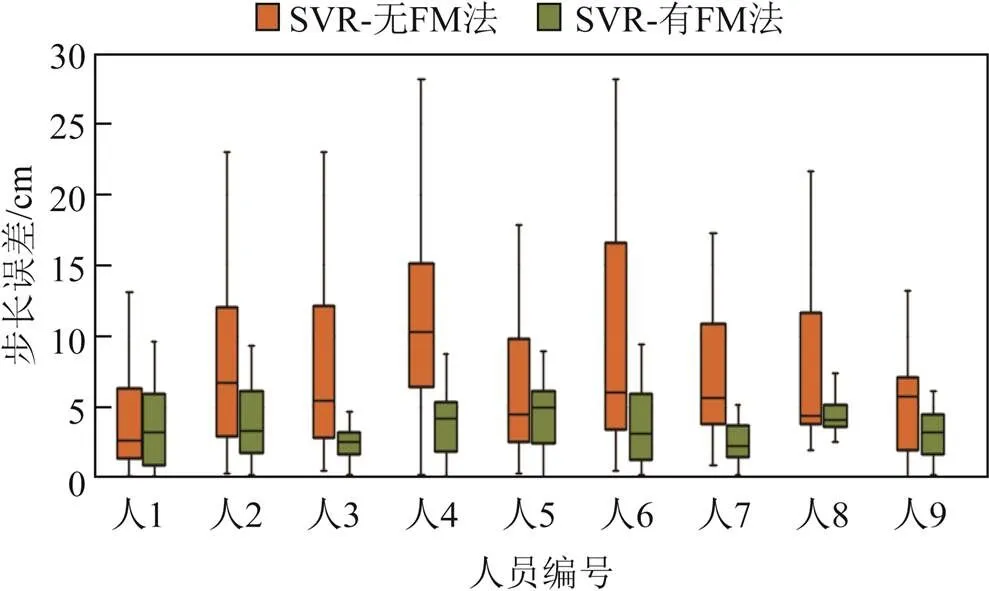
图8 对于不同人的步长估计性能对比
2)对于不同地点适用性。图9给出了不同地点下的性能。由图可知,FM特征的加入使得所有地点的步长估计性能都有一定的提升。
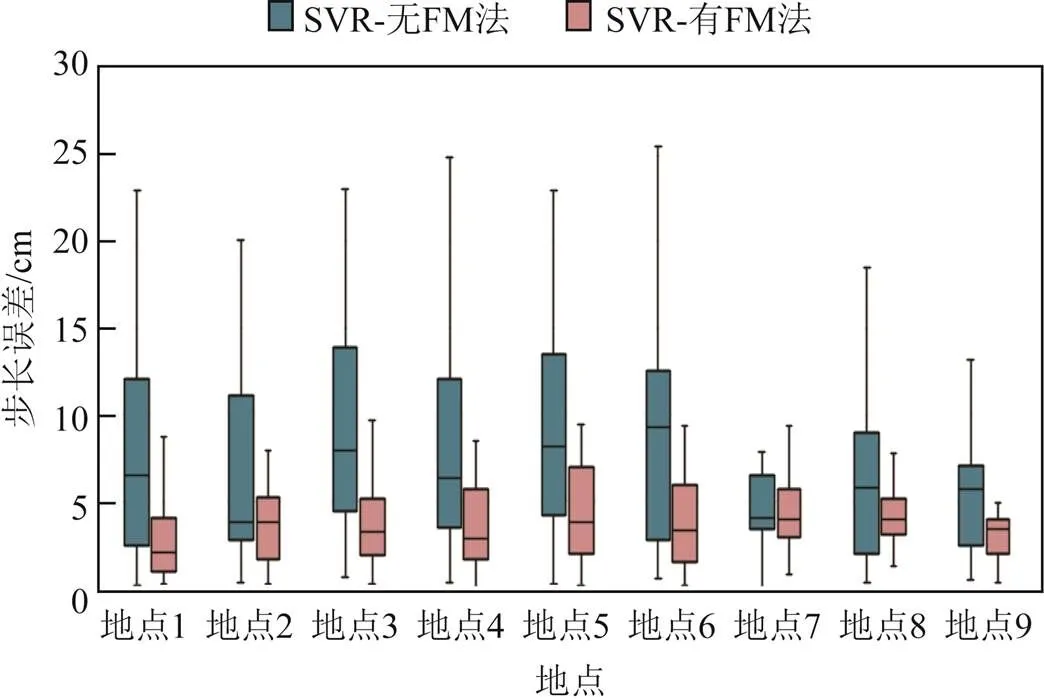
图9 对于不同地点的步长估计性能对比
3.2 航向估计算法验证
为了验证航向估计算法的性能,请2位实验人员在北京航空航天大学内2个地点进行实验。
第一组实验测试时长约为10 min,转弯方式为弧线转弯,轨迹总长度约为428 m,采用手持方式。航向误差通过比较每一步的估计航向与真实航向得到,然后计算误差绝对值的平均值与最大值。
本文对陀螺法、磁力计法、融合法-有FM以及融合法-无FM这4种方法进行对比,如图10所示。后2种方法的差异在于直线/转弯分类是否使用了FM信号特征。由图可知,陀螺法因为误差累积而迅速偏离真实航向,磁力计法因受到磁干扰而上下波动。本文设计的融合法能够有效减小误差漂移,而FM信号的加入通过提升直线/转弯识别准确率而使得对航向误差的约束效果更优。
第二组实验测试时长约为16 min。真实轨迹中包含了多条长直线,轨迹长度约1116 m,采用绑在腰上的方式。航向误差如图11所示。由图可知,融合法能够有效减小航向误差,且引入FM信号后航向误差得到改善。
2组实验不同方法下航向的误差均值如表3所示。由表可知,相对于陀螺法、磁力计法、融合法-无FM,融合法-有FM的误差均值分别减小了81%、66%、27%以上。上述结果证明了算法对于不同地点、行走轨迹、携带方式的适用性。
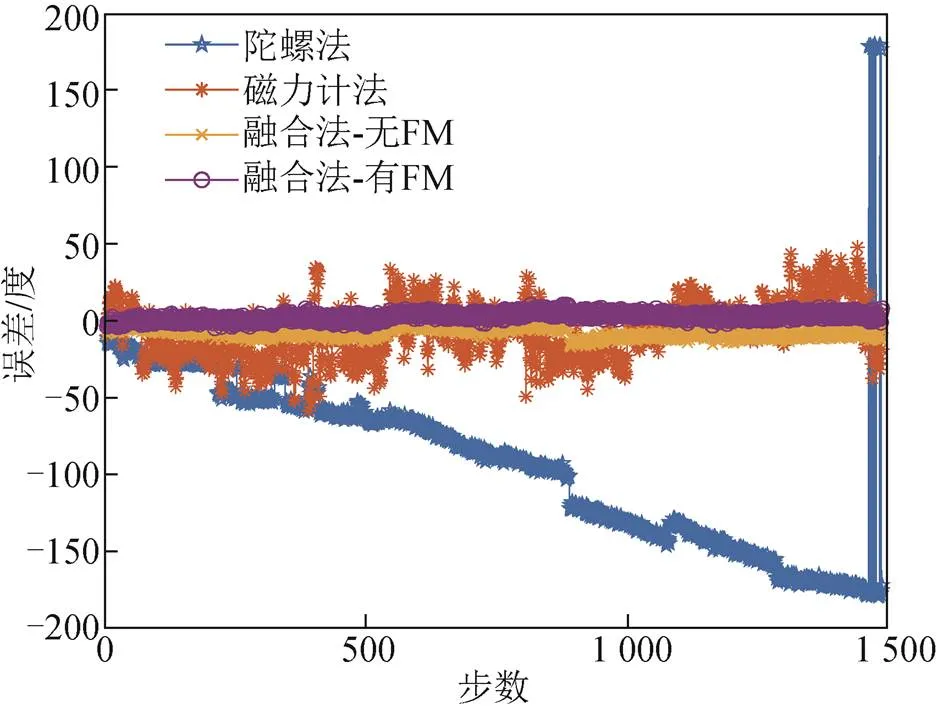
图11 第二组实验不同方法的航向估计误差对比

表3 不同方法的航向估计误差 (°)
3.3 定位结果分析
本小节对3.2中2组实验的定位结果进行分析。这里比较融合法-有FM与融合法-无FM的定位结果,2种方法的区别在于前者将FM信号应用于步长估计以及直线/转弯分类中。2组实验的定位轨迹分别如图12与图13所示。由图可知,FM的引入减小了步长估计与航向估计误差,从而提升了定位性能。2组实验的融合法-有FM法下定位误差均值分别是2.3、5. 0m,相比融合法-无FM法分别减小了36.1%与78.9%。
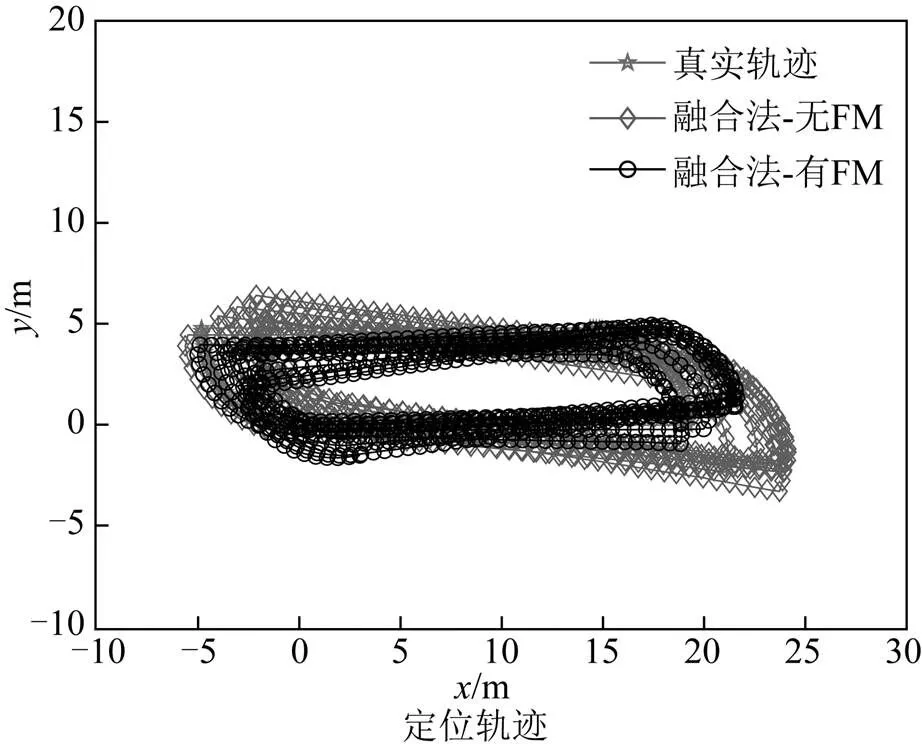
图12 第一组实验定位轨迹与真实轨迹对比
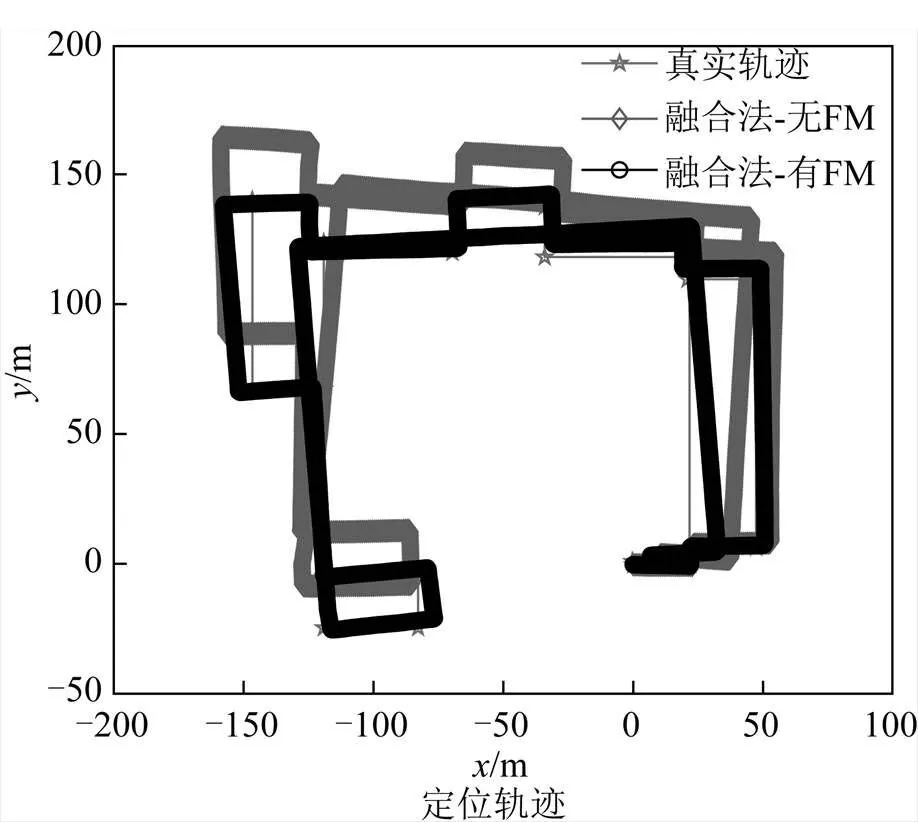
图13 第二组实验定位轨迹与真实轨迹对比
4 结束语
本文在传统PDR算法的基础上,通过组合FM信号特征与加速度、角速度特征提升了步长估计与直线/转弯运动模式识别的性能,并在模式识别的基础上对航向漂移误差进行约束,提高了定位精度。
1)身高、体重不同的9位实验人员在4个建筑内进行了步长实验。SVR-FM法的步长误差均值为3.2 cm,相比SVR-无FM法提升了57.8%,证明了算法对于不同人、地点的适用性。
2)2位实验人员在2个地点进行了定位实验,2组实验的融合法-有FM法下的定位误差均值分别是2.3、5.0m。实验结果表明,加入FM后,航向误差绝对值的均值减小了27%以上,定位误差绝对值的均值则减小了36%以上。
本文提出的算法为低成本、高适用性的室内定位问题提供了一种参考解决方案。在此算法的基础上,未来将进一步研究高度估计算法,以实现室内行人三维定位。
[1] ZHOU C, LIU J, SHENG M, et al. Exploiting fingerprint correlation for fingerprint-based indoor localization: A deep learning based approach[J]. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5762-5774.
[2] KUMAR S, GIL S, KATABI D, et al. Accurate indoor localization with zero start-up cost[C]// ACM. ACM, 2014.
[3] DONG JIANG, NOREIKIS MARIUS, XIAO YU, et al. ViNav: A vision-based indoor navigation system for smartphones[J]. IEEE Transactions on Mobile Computing, 2019.
[4] SHI L F, ZHAO Y L, LIU G X, et al. A robust pedestrian dead reckoning system using low-cost magnetic and inertial sensors[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 68(8): 2996-3003.
[5] WEINBERG H. Using the ADXL202 in pedometer and personal navigation applications[J]. USA:Analog Devices, 2002,2: 1-6.
[6] ZIHAJEHZADEH S, PARK E J. Experimental evaluation of regression model-based walking speed estimation using lower body-mounted IMU[C]// 201638th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2016: 243-246.
[7] ZIHAJEHZADEH S, PARK E J. A Gaussian process regression model for walking speed estimation using a head-worn IMU[C]// 201739th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2017.
[8] PHAM T T, SUH Y S. Histogram feature-based approach for walking distance estimation using a waist-mounted IMU[J]. IEEE Sensors Journal, 2020: 1.
[9] SAHOO S, PANDA S K, PRATIHAR D K, et al. Prediction of step length using neuro-fuzzy approach suitable for prosthesis control[J]. IEEE Transactions on Instrumentation and Measurement, 2020: 1.
[10] AR JIMÉNEZ, SECO F, PRIETO J C, et al. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU[C]// 20107th Workshop on Positioning, Navigation and Communication. IEEE, 2010.
[11] WU Y, ZHU H , DU Q, et al. A pedestrian dead-reckoning system for walking and marking time mixed movement using an SHSs scheme and a foot-mounted IMU[J]. IEEE Sensors Journal, 2019, 19(5): 1661-1671.
[12] JIMÉNEZ A R, SECO F, ZAMPELLA F, et al. Improved heuristic drift elimination (iHDE) for pedestrian navigation in complex buildings[C]// 2011 International Conference on Indoor Positioning and Indoor Navigation. IEEE, 2011: 1-8.
[13] DIEZ L E, BAHILLO A, BATAINEH S, et al. Enhancing improved heuristic drift elimination for wrist-worn PDR systems in buildings[C]// 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall). IEEE, 2016: 1-5.
[14] SHEN L L, HUI W W S. Improved pedestrian dead-reckoning-based indoor positioning by RSSI-based heading correction[J]. IEEE Sensors Journal, 2016, 16(21): 7762-7773.
[15] PANYOV A A, GOLOVAN A A, SMIRNOV A S. Indoor positioning using Wi-Fi fingerprinting pedestrian dead reckoning and aided INS[C]// 2014 International Symposium on Inertial Sensors and Systems (ISISS). IEEE, 2014: 1-2.
[16] WU H, HE S, CHAN S H G. A graphical model approach for efficient geomagnetism-pedometer indoor localization[C]// 2017 IEEE 14th International Conference on Mobile Ad Hoc and Sensor Systems (MASS). IEEE, 2017: 371-379.
[17] YOON S, LEE K, RHEE I. FM-based indoor localization via automatic fingerprint DB construction and matching[C]// Proceeding of the 11th Annual International Conference on Mobile Systems, Applications and Services. ACM, 2013: 207-220.
[18] YOON S, LEE K, YUN Y C, et al. ACMI: FM-based iIndoor localization via autonomous fingerprinting[J]. IEEE Transactions on Mobile Computing, 2016, 15(6): 1318-1332.
[19] WANG H, CONG L, QIN H. A real-time pedestrian dead reckoning system with FM-aided motion mode recognition[J]. IEEE Sensors Journal, 2019, 19(8): 3020-3032.
[20] CORTES C, VAPNIK V. Support-vector networks[J]. Machine Learning, 1995, 20(3): 273-297.
FM-aided pedestrian dead reckoning system for indoor positioning
TIAN Jingnan, CONG Li, QIN Honglei
(School of Electronic and Information Engineering, Beijing University of Aeronautics and Astronautics, Beijing 100191, China)
Aiming at the problems that existing methods of pedestrian dead reckoning (PDR) in indoor positioning system have poor applicability of accelerometers, and inertial sensors and magnetometer-based heading estimation suffers from sensor errors and magnetic field interference, leading to low accuracy, the paper proposed an FM-aided PDR system for indoor pedestrian location without additional infrastructure and laborious surveys: the relationship between FM signal received signal strength indicator (RSSI) and step length was explored on the basis of propagation model, and RSSI was combined with acceleration to improve the applicability of step length estimation (SLE); then by analyzing the change of FM signals under different modes, the signal was combined with angular velocity to improve the accuracy of going straight/turning motion mode recognition, and then the recognition results were utilized to control the heading errors; finally, indoor positioning was realized by combining step length and heading results. Experimental result showed that the introduction of FM signals would reduce the localization errors by 36.1% and 78.9%, respectively.
indoor positioning; pedestrian dead reckoning (PDR); motion mode recognition; radio signal; frequency modulation (FM) signal; received signal strength indicator (RSSI)
田婧楠,丛丽,秦红磊. 一种调频广播信号辅助PDR的室内定位技术[J]. 导航定位学报, 2023, 11(4): 104-112.(TIAN Jingnan, CONG Li, QIN Honglei. FM-aided pedestrian dead reckoning system for indoor positioning[J]. Journal of Navigation and Positioning, 2023, 11(4): 104-112.)DOI:10.16547/j.cnki.10-1096.20230415.
P228
A
2095-4999(2023)04-0104-09
2023-01-04
田婧楠(1997—),女,河北张家口人,博士研究生,研究方向为无线电信号定位及室内定位等技术。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
新世纪智能(高一语文)(2021年3期)2021-07-16
家庭影院技术(2021年2期)2021-03-29
建材发展导向(2019年10期)2019-08-24
民用飞机设计与研究(2019年4期)2019-05-21
淄博师专论丛(2019年1期)2019-04-04
电子制作(2017年24期)2017-02-02
铁道通信信号(2016年1期)2016-06-01
河北科技大学学报(2015年5期)2015-03-11
法大研究生(2015年2期)2015-02-27