基于弓网视频的接触网硬点检测方法研究
2023-08-29 07:11鲁尧
中国设备工程 2023年16期
鲁尧
(深圳地铁运营集团有限公司,广东 深圳 518000)
1 概述
目前,国内许多城市轨道交通已经取得了长足发展。随着地铁牵引供电的飞速发展,其性能上的诸多缺陷和弊病也进一步出现,多数地铁都是通过受电弓滑板和接触线的滑动接触获取电能,因此,在该供电系统中,接触网的安全、稳定在地铁安全运营中占据不可或缺的地位。
若接触网中存在硬点,通常会导致弓网系统出现不同程度的机械损伤,甚至发生强烈抖动,进一步导致弓网离线、燃弧等现象,加剧相关设备的电气损伤。
针对上述情况,本文提出了一种基于弓网视频的非接触式接触网硬点检测方法,即通过高清监控相机对弓网接触区域实时录像,进一步通过本文提出的算法检测弓网硬点,该算法可分为四大步骤,分别为受电弓区域定位、弓网接触区域定位、弓网接触点定位、硬点计算。本文对该方法进行了较充分的验证,满足实际应用的水平,且由于是通过视频采集原始图像数据,在检测到异常硬点值时,可通过相应位置对应的视频信息确认,进一步大大提高了人工效率。
2 方法
本文所涉及的图像数据由安装在电客车车顶的高清监控相机采集,该相机通常安装在受电弓开口方向,并以一定帧率对受电弓区域进行实时录像,进一步将采集到的每一帧图像传输到车内工控机中,利用部署在该工控机中的智能检测算法计算当前帧的硬点值。
2.1 受电弓区域粗定位
本文也尝试过直接在整幅图像中直接识别弓网接触点,但识别精度和稳定性都不尽如人意。而先定位受电弓区域,再进行后续处理时,其识别精度和稳定性得到了大幅提升。
本文所述受电弓目标定位采用基于Yolov5n 的图像目标检测网络作为算法模型。目前Yolov5 因其快速、准确、轻量等诸多优点,被广泛应用于工业界,本文在引入该模型时,增加了部分使用技巧,如数据增强方式、标签平滑,提高了检测精度,并在项目应用中达到了较好的结果。
2.1.1 数据集制作与增强
高清相机采集的原始图像如图1 所示,利用图像标注工具Labelimg 对受电弓区域进行标注,标注结果如图2 所示。
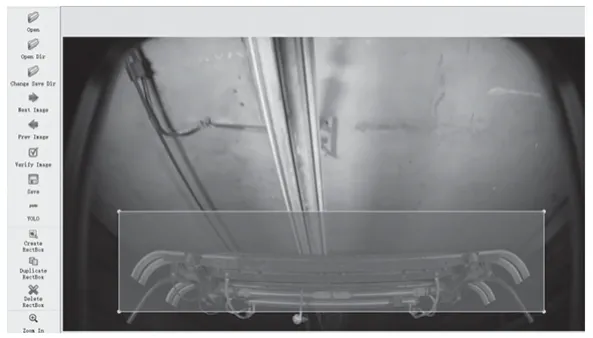
图1 受电弓区域标记示意图

图2 弓网接触区域标记示意图

图3 改进后的网络基本模块
神经网络在训练的过程,通常都需要大量的数据,而获取新的数据往往需要花费大量的时间和人工,而数据增强提供了一种有效地增加数据量的方式,如缩放、平移、翻转、色彩变换等。
Yolov5n 中除了使用基本的数据增强方式以外,还使用了Mosaic 数据增强,即将4 张图像进行随机裁剪、缩放后再随机排布成一张图像。
本文为进一步提升定位准确性,采用Mosaic-9 方式进行数据增强,即对9 张图像随机裁剪、缩放、排列组合。
2.1.2 数据标签平滑
标签平滑最早应用于分类算法中,后引入目标检测算法中。目标检测算法分为分类和回归两个分支,其主要作用于分类,属于正则化方法中的一种。其主要思想是对真实标签的分布进行改造,使其不再遵循独热(one-hot)编码形式,其转化公式如下:
其中,q 表示真实标签,c 是一个较小的常数,k 代表分类的类别数。
本文在Yolov5n 的预测层引入上述标签平滑方法。经过标签平滑后能够减少模型过渡以来标签问题,有效改善标签准确性不高的情况。
2.2 定位弓网接触区域
本文所阐述的弓网接触区域定位是为了提升弓网接触点识别精度和稳定性另一个关键步骤。该步骤需要在已经定位到的受电弓区域中进行识别定位,并且同样采用Yolov5n 定位网络模型,其数据集制作与数据增强方式与受电弓区域定位类似,此处不赘述,仅仅是数据集制作时标记的原图是已经定位到的受电弓区域图像,编辑区域是汇流排与受电弓接触位置周围一定区域,如图2 所示。
在制作该步训练数据时,标记范围尽量包含整个汇流排宽度范围以及碳滑板整个高度范围,以保证有组足够的特征训练出性能更加稳定准确的定位模型。
2.3 精确识别弓网接触点
本文所阐述的弓网接触点识别是采用改进的深度残差网络。
本文在原始残差网络中引入注意力机制与软阈值化激活函数,使得原始网络能够发现有用信息并增强该部分信息,且抑制冗余信息。
软阈值化能够降低输入数据中的噪声,该方式可将绝对值小于某个阈值的特征去掉,将绝对值大于这个阈值的特征朝着0 的方向收缩。针对本方案所涉及的任务,其可通过以下方式实现。
上述软阈值化的输出对于输入的导数为
该导数形式与Relu 激活函数性质相同,能够减小深度学习算法遭遇梯度弥散和梯度爆炸的风险。
原始残差块与引入注意力机制和软阈值后的基本模块如下。
通过堆叠多个上述基本模块即可形成改进后的残差网络。
在制作训练样本时,训练数据为已经定位到的弓网接触区域截图,标记位置不同于直接定位,直接定位的标签为矩形框,而本文在利用残差网络回归识别弓网接触点时,标记标签相应为一个点坐标,如图4 所示。
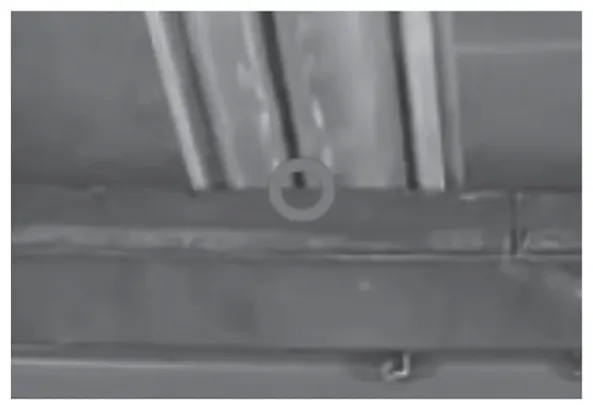
图4 弓网接触点标记示意(灰圈即接触点)
2.4 接触网硬点计算
在实时检测阶段,当识别到当前帧的弓网接触点,根据相机标定参数可将像素坐标转换为实际的世界坐标,进一步通过当前帧弓网接触点的世界坐标与上一帧的世界坐标可计算出纵向实际位移,最终通过位移与两帧时间间隔额关系可计算出加速度,即为硬点信息,即令pi 为第i 帧弓网接触点坐标如下所示。
进一步,纵向位移可通过下式得到。
最后,通过位移与时间间隔的关系可得到硬点加速度信息ai,如下所示。
其中,t 为两帧之间的时间间隔,因为视频相机帧率始终恒定,所以t 是一个固定值,根据实际情况确定。
3 实验
本文实验所用数据为实际地铁线路录像数据,图像分辨率大小为1936×1464。
在训练受电弓区域定位模型时共标注样本3000 张,其中2600 张作为训练集,400 张作为验证集。
在训练弓网接触区域定位模型时,标注样本数量与受电弓模型基本一致,模型参数也基本一致。
在训练弓网接触点精确识别模型时,标注样本数量与上述两阶段基本一致。
测试阶段,对于受电弓区域定位模型,测试图像总数108927,识别准确率为100%,误识别和漏识别都是0,具体如表1。

表1 受电弓区域定位测试结果
对于受电弓区域定位模型,测试图像总数108927,识别准确率为100%,误识别和漏识别都是0,具体如表2。

表2 弓网接触区域定位测试结果
对于弓网接触点精确识别模型,测试图像总数108927,正确识别数108921,识别准确率为99.994%,误识别数6,误识别率0.006%,漏识别0,具体如表3。

表3 弓网接触点识别测试结果
4 结语
本文所提出的基于弓网视频的硬点检测技术经过实验验证,弓网接触点识别准确率达到99.994%,根据本方法的理论,只要弓网接触点识别准确,硬点即可准确计算。本文所提出方法满足实际应用的水平,相较一般的接触式检测方法,安装简单,检测更稳定,且由于是通过视频采集原始图像数据,在检测到异常硬点值时,可通过相应位置对应的视频信息确认,进一步大大提高了人工效率。
猜你喜欢
中国铁路(2020年7期)2020-10-09
测控技术(2018年8期)2018-11-25
北京汽车(2018年2期)2018-05-02
中国设备工程(2018年7期)2018-04-21
时代农机(2018年12期)2018-02-14
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
上海铁道增刊(2017年2期)2017-04-18
电气化铁道(2016年4期)2016-04-16
铁道科学与工程学报(2015年5期)2015-12-24
铁路通信信号工程技术(2014年6期)2014-02-28