基于卡尔曼观测器的电机模拟器接口电流自抗扰无差拍预测控制算法
2023-09-15 08:23王志福田昊黄丽敏万择安
北京理工大学学报 2023年9期
王志福,田昊,黄丽敏,万择安
(1.北京理工大学 电动车辆国家工程研究中心,北京 100081;2.北京理工大学 长三角研究院,浙江,嘉兴 314011;3.成都大学 机械工程学院,四川,成都 610106)
电机模拟器(electric machine emulator, EME)是一种面向电驱动系统测试的新型平台,依托电子计算单元实时模拟真实电机特性,通过硬件电路与电驱动系统(motor control unit, MCU)进行功率交互,从而在电驱动系统测试工作中取代真实电机[1].在新能源车辆电驱动系统开发及测试工作中具有突破时空限制、降低测试成本等优势,得到学者高度关注[2-4].接口电路是电机模拟器与待测电驱动系统进行功率交互的重要部件,在硬件层面决定了系统稳定性与模拟精度,目前针对LCL(电感—电容—电感)型接口拓扑的研究成为热点[5].实时模拟的关键是接口电流控制算法,在软件层面决定了系统稳定性与模拟精度,常用算法包括PI 控制、无差拍电流预测控制(deadbeat predictive current control, DPCC)等.PI 控制在实际应用中易出现控制冲突,在复杂接口拓扑电流控制中性能严重受限[6];DPCC 根据预测模型对接口电流进行预测,跟踪精度高、动态响应快[7],能有效满足系统高带宽运行.但该算法是一种基于模型的控制算法,当真实参数与理论值出现偏差时,系统将震荡甚至失稳[8];另外,该算法延迟环节计算耦合度高,难以保证功率交互过程中控制信号的实时性[9].
扰动观测器法是一种抑制参数扰动的有效方法,其基本原理是通过补偿参数扰动带来的影响来抑制参数扰动,具有结构简单、运算效率高、效果明显等优点.赵凯辉等[10]采用扩展滑模观测器对参数扰动进行观测,虽进行改进,但仍无法平衡趋近速度与抖振,系统鲁棒性有待提高.基于自抗扰控制[11]的思想,张硕等[12]提出一种基于自回归模型估计参数扰动方法,将扰动造成的误差补偿至预测模型,但为保证实时性对数学模型进行了简化,抑制效果有限;李琪等[13]针对电机模拟器系统,基于龙伯格观测器设计了一种未知输入观测器,通过状态反馈实现对模型参数扰动进行抑制,但需要手动配置极点以确定观测器增益,未考虑模型误差及测量误差,模拟精度难以保证.
文中针对具有LCL 型接口电路的电机模拟器系统,结合扰动观测器法及自抗扰控制的思想,提出一种基于卡尔曼观测器的自抗扰无差拍电流预测控制算法,实现对接口参数扰动影响的抑制及延迟环节的实时计算.该方法理论简单,在电机模拟器系统应用中易于实现.文中也通过仿真与物理平台试验验证了所提出方法的有效性.
1 电机模拟器系统与接口电流控制算法
1.1 电机模拟器与接口电路
选择具有LCL 型接口电路的电机模拟器系统作为研究对象,拓扑结构如图1 所示,包含信号仿真部分(电机模型、接口电流控制算法、调制算法)、硬件电路部分(接口电路、功率级逆变器、传感器).其中信号仿真运行于实时处理器中,通过传感器采集接口电流信号,通过电机模型实时仿真得到真实电机的接口响应,并由接口电流控制算法生成控制信号,进而控制功率器件与电驱动系统进行功率交互.

图1 电机模拟器系统拓扑结构Fig.1 System topology of the electric machine emulator
LCL 型接口电路单相拓扑如图1 所示,其中,Li为电机控制器侧滤波电感;Lo为电机模拟器侧滤波电感;C为滤波电容;RC为阻尼电阻;ui为MCU 侧驱动系统输出的三相驱动电压,uo为EME 侧功率器件产生的三相电压.
dq坐标系下接口电路单相电压表示为
式中:uid、uiq为MCU 侧输出电压d、q轴分量;iid、iiq为接口电流d、q轴分量;uod、uoq为EME 侧输出电压d、q轴分量;iod、ioq为滤波接口电流d、q轴分量;ωe为电角速度.
1.2 无差拍电流预测控制算法

式中:Ts为采样时间;ωe为电角速度;
令MCU 侧预测电流跟踪电机模型输出参考电流,即:ii(k+1)=i*i(k),有:
令EME 侧预测电流跟踪上式得期望输出电流,即:io(k+1)=,并考虑延迟环节,有:
2 卡尔曼观测器设计与接口电流控制算法改进
2.1 参数扰动影响分析与状态观测器设计
对系统参数发生扰动时进行分析,将控制算法中预测模型参数改写为实际参数,则式(4)改写为
式中:ΔAi、ΔBi、ΔCi分别为系统参数发生扰动时系数矩阵Ai、Bi、Ci的扰动量,与式(4)相减,得到发生参数扰动后EME 侧期望输出电流的偏差值:
同理,式(5)改写为
式中:ΔAo、ΔBo、ΔCo为接口参数发生扰动时系数矩阵Ao、Bo、Co的扰动量.与式(5)相减,得到发生参数扰动后EME 侧期望输出端电压的偏差值为
由式(7)、式(9)可见,系统参数扰动对控制系统造成的影响最终体现为预测电流、预测电压的扰动.文中将其抽象为补偿电流、补偿电压,采用状态观测器对其进行观测估计,前馈至控制系统,进而实现对参数扰动所造成影响的抑制.
通过对式(9)的分析,EME 侧期望输出端电压的偏差值由两部分组成:一部分由于参数扰动造成出现偏差、进而造成出现偏差;另一部分由于参数扰动直接造成出现偏差.文中分别设计状态观测器,对二者所造成的影响进行补偿抑制.
将离散化后的接口电流方程中的模型参数改写为发生扰动的实际参数:
将误差项抽象为补偿电流il(k)、补偿电压ul(k),整理得到:
考虑所构建的扰动观测器得到的补偿电流、补偿电压将在下一时刻补偿至控制系统,将考虑延迟补偿的补偿电流il(k+1)、补偿电压ul(k+1)作为状态观测器系统状态量之一.
进一步,针对传统DPCC 算法中延迟环节ii(k+1)、io(k+1)计算需通过式(3)计算、与控制系统高度耦合的问题,文中通过所设计的状态观测器与控制系统进行并行观测计算.将ii(k+1)、io(k+1)作为状态观测器系统状态量之二.
结合式(3)的被控对象数学模型,构建系统状态空间方程:
可以看出,式(12)、式(13)观测矩阵满秩,具有状态可观性,可用于状态观测器的构建.
2.2 基于卡尔曼滤波器的状态观测器构建
考虑到计算效率、补偿精度等因素,结合式(12)、式(13)的数学模型结构,选取卡尔曼滤波算法进行状态观测器构建.
应用于离散线性系统的经典卡尔曼滤波算法状态方程与观测方程表示为[14]
式中:xk为待估计的状态变量;F为系统状态矩阵;B为系统输入矩阵;H表示状态变量的雅可比矩阵;vk为过程噪声;wk为观测噪声,二者相互独立;令Q、R分别为二者的协方差矩阵.
基于式(12)构建补偿电流观测器(Kalman filter current observer, KFIO),负责延迟电流ii(k+1)、补偿电流il(k+1)的观测.卡尔曼滤波算法系统状态方程与观测方程为
式中:vi(k)为过程噪声;wi(k)为KFIO 的观测噪声.
令Qi、Ri分别为二者协方差矩阵.则预测环节先验估计、先验估计协方差表达式为
校正环节卡尔曼增益、后验估计、误差协方差更新表达式为
式中:Ki(k)为KFIO 的卡尔曼增益;分别为延迟电流、补偿电流的后验估计;Pi(k+1)代表更新后的误差协方差.
基于式(13)构建补偿电压观测器(Kalman filter voltage observer, KFVO),负责延迟电流io(k+1)、补偿电压ul(k+1)的观测.卡尔曼滤波算法系统状态方程与观测方程为
式中:vu(k)为过程噪声;wu(k)为KFVO 的观测噪声.
令Qu、Ru表示二者协方差矩阵,则预测环节先验估计、先验估计协方差表达式为
校正环节卡尔曼增益、后验估计、误差协方差更新表达式为
式中:Ku(k)为KFVO 的卡尔曼增益;分别为延迟电流、补偿电压的后验估计;Pu(k+1)为更新后的误差协方差.
将KFIO、KFVO 观测得到的延迟环节ii(k+1)、io(k+1)作为考虑延迟补偿的无差拍电流预测控制算法的输入,并将补偿电流il(k+1)、补偿电压ul(k+1)前馈至控制系统,作为EME 侧期望输出电流i*o(k)、EME 侧期望输出端电压u*o(k)的补偿,得到文中提出的基于卡尔曼观测器的自抗扰无差拍电流预测控制算法,其原理框图如图2 所示.

图2 基于卡尔曼观测器的自抗扰无差拍电流预测控制算法框图Fig.2 Block diagram of Kalman observer-based active disturbance rejection dead-beat predictive control algorithm
所提出的改进算法的优势在于计算中将卡尔曼增益作为状态观测器增益,并在校正环节中实时更新,避免了手动配置观测器增益的随机性;同时每一步计算卡尔曼增益时还可以根据误差协方差自适应调节,提升观测准确性.
3 仿真和试验验证
为验证文中所提出的基于卡尔曼观测器的自抗扰无差拍电流预测控制算法能有效抑制系统参数扰动所造成的影响,搭建基于LCL 型接口电路的电机模拟器系统模型进行仿真试验,并构建物理试验平台进行验证,对接口参数发生扰动前后的试验结果进行对比.
3.1 研究对象
文中所搭建的基于LCL 型接口电路的电机模拟器系统相关参数及如表1 所示.所模拟电机采用三相表贴式永磁同步电机,两侧功率级逆变器采用空间矢量脉宽调制,开关频率均为20 kHz.MCU 采用id=0 的矢量控制策略.

表1 电机模拟器系统LCL 型接口模型参数及所模拟电机参数Tab.1 Parameters of the LCL-type interface model and the simulated motor
3.2 试验平台
文中所搭建的试验平台如图3 所示.图3(a)为电机模拟器系统的供电电源;图3(b)为文中构建的基于LCL 型接口电路的电机模拟器物理平台,包括实时处理器、功率级变换器、LCL 型接口电路及传感器等.其中实时处理器选择Typhoon HIL 602+设备,其中FPGA 负责电机模型的电磁仿真、DSP 负责接口电流控制算法、调制算法的计算;以三相两电平电压源型IGBT 作为功率级变换器;其余设置与仿真试验相同.图3(c)为传统机械式负载台架,配备具有表1 所示参数的真实电机开展对比试验.

图3 文中所搭建的试验平台Fig.3 The experimental platform built in this article
3.3 仿真结果分析
仿真试验工况设置为:仿真时间为0.3 s,转速指令在0.15 s 内由0 加速至2 000 r/min,负载转矩指令于t=0.19 s 时在0.01 s 内增加至10 N·m.仿真步长设置为1×10-6s,解法器选择固定步长模式,采用欧拉法进行仿真数值计算.通过设置模型中接口电路的参数来模拟接口电路发生参数扰动.
参考前人研究[9,12-13],对接口电路模型各参数设置扰动值.分别采用传统DPCC 算法、文中所提出的改进DPCC 算法开展仿真,并将相同条件下接口参数未发生扰动的系统仿真结果作为参考值进行对比.在仿真阶段,文中对参数未发生扰动(图中记为in_ref)、参数扰动+传统方法(图中记为in_tra)、参数扰动+文中方法(图中记为in_new)三种情景下接口d、q轴电流、a相电流、电机转速与相同工况下真实电机的仿真结果进行对比,并对接口d、q轴电流及其跟踪误差(图中记为id/q_err)进行进一步分析.考虑到滤波电容端电压uC作为输入量,与滤波电容值大小强相关,重点针对滤波电感Li/Lo、阻尼电阻RC的参数扰动进行研究,仿真试验结果如图4~图7 所示.
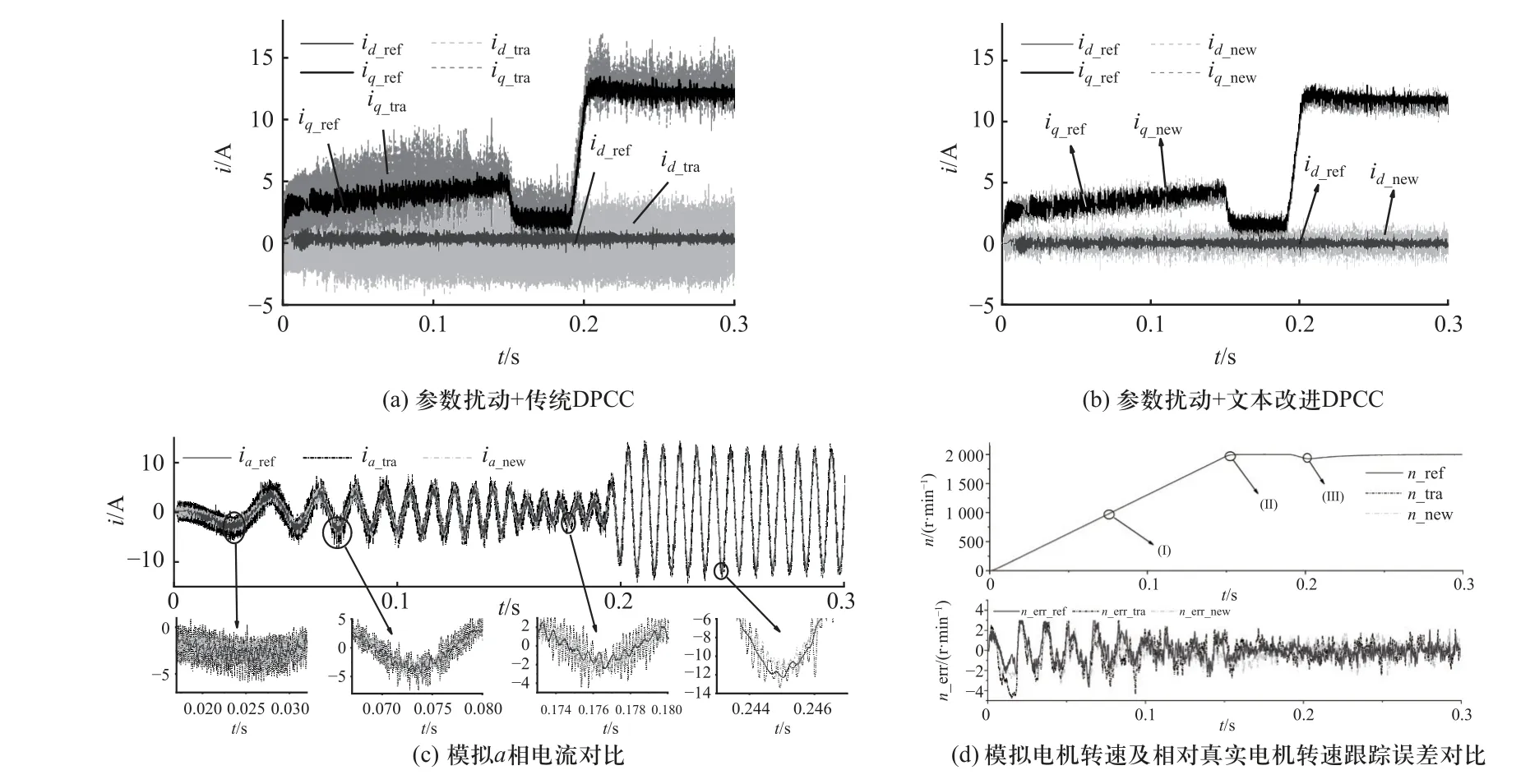
图4 滤波电感发生扰动(Li_real=0.3Li、Lo_real=0.3Lo)时仿真结果Fig.4 Simulation results for the filter inductor with disturbance (Li_real=0.3Li Lo_real=0.3Lo)
图4、图5 为滤波电感发生扰动时的仿真结果,进一步对d、q轴电流跟踪误差进行定量分析,以电流跟踪误差作为评价标准,表达式如式(21)所示.定量分析结果如表2 所示.
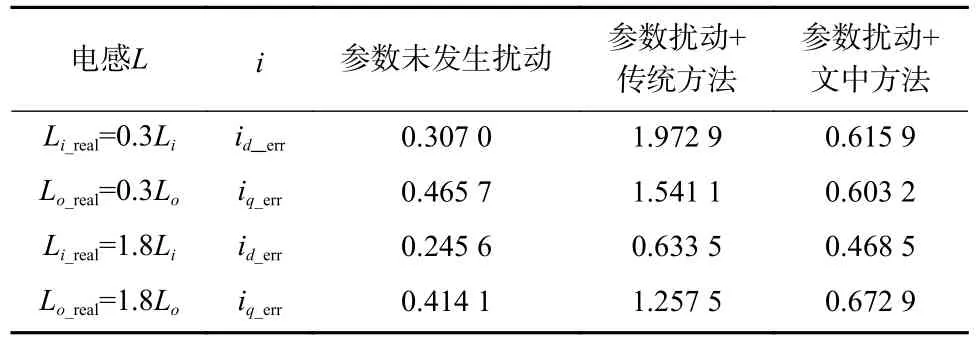
表2 电机模拟器系统滤波电感发生扰动时接口电流跟踪误差Tab.2 The interface current tracking error when the filter inductor of the EME system is disturbed

图5 滤波电感发生扰动(Li_real=1.8Li、Lo_real=1.8Lo)时仿真结果Fig.5 Simulation results for the filter inductor with disturbance (Li_real=1.8Li Lo_real=1.8Lo)
式中:id/q为电机模拟器系统的d、q轴电流仿真结果;为相同工况下真实电机d、q轴电流仿真结果;t1为仿真开始时间;t2为仿真结束时间.
可见,文中方法能有效抑制滤波电感发生参数扰动所造成的影响.由表2 可以量化地看出,相对于参数未发生扰动,当滤波电感为理论值的0.3 倍时,采用文中方法能使参数扰动对d轴电流跟踪误差造成的影响由542.64%下降至100.62%,对q轴电流跟踪误差造成的影响由230.92%下降至29.53%;当滤波电感为理论值的1.8 倍时,采用文中方法能使参数扰动对d轴电流跟踪误差造成的影响由157.94%下降至90.76%,对q轴电流跟踪误差造成的影响由203.67%下降至62.5%.系统抗参数扰动的能力明显加强,鲁棒性明显改善.且无论滤波电感参数发生负向扰动(实际参数小于模型参数)还是正向扰动(实际参数大于模型参数),文中方法都能很好抑制由此造成的电流震荡.同时也可以看出,当滤波电感发生参数扰动时,对电机模拟器系统的稳定性、模拟精度会造成较大影响.
图6、图7 为阻尼电阻发生扰动时的仿真结果,进一步对d、q轴电流跟踪误差进行定量分析,如表3 所示.

表3 电机模拟器系统阻尼电阻发生扰动时接口电流跟踪误差Tab.3 The interface current tracking error when the damping resistance of the EME system is disturbed
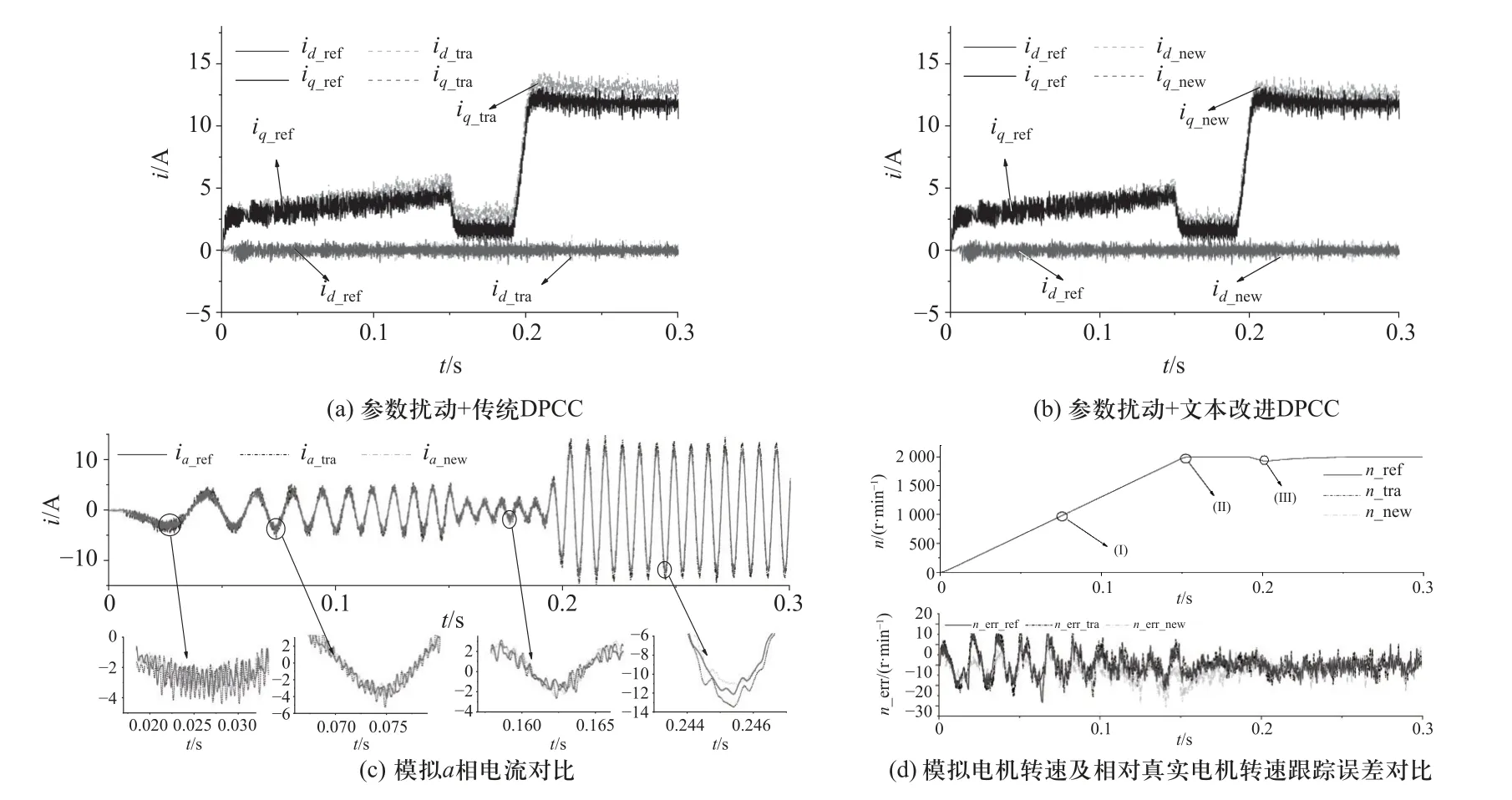
图6 阻尼电阻发生扰动(RC_real=0.5RC)时仿真结果Fig.6 Simulation results for the damping resistance with disturbance (RC_real=0.5RC)

图7 阻尼电阻发生扰动(RC_real=3RC)时仿真结果Fig.7 Simulation results for the damping resistance with disturbance (RC_real=3RC)
可见,文中方法也可以有效抑制阻尼电阻扰动所造成的影响.由表3 可见,相对于参数未发生扰动,当阻尼电阻为理论值的0.5 倍时,采用文中方法能使参数扰动对d轴电流误差造成的影响由21.14%下降至7.07%,对q轴电流误差的影响由157.18%下降至48.06%;当阻尼电阻为理论值的3 倍时,采用文中方法能使参数扰动对d轴电流误差造成的影响由94.38%下降至3.87%,对q轴电流误差造成的影响由99.2%下降至7.49%.可见系统抗参数扰动的能力有所增强,同时相比于滤波电感,阻尼电阻发生扰动对电机模拟器系统稳定性的影响相对较小,且发生负向扰动的影响大于正向扰动.
3.4 试验结果分析
进一步,文中在所搭建的电机模拟器物理平台上对所提出的基于卡尔曼观测器的自抗扰无差拍电流预测控制算法进行了试验验证.工况设置为:转速指令在2 s 内由2 000 r/min 降低至1 000 r/min,负载转矩指令在0.02 s 内由10 N·m 降低至1 N·m.通过修改控制系统中相关接口参数来模拟接口电路发生参数扰动.
文中参考前人研究设置各参数扰动值[9,12-13],并分别采用传统DPCC 算法、文中所提出的改进DPCC 算法,针对滤波电感、阻尼电阻同时发生扰动时开展试验并进行对比.同时基于配备同型号真实电机的传统机械负载台架,对参数未发生扰动(图中记为i/n_ref)、参数扰动+传统DPCC(图中记为i/n_tra)、参数扰动+文中改进DPCC(图中记为i/n_new)三种情况的接口电流与相同工况下真实电机的相电流、dq轴电流、电机转速进行了对比,并对a相电流的跟踪误差(图中记为ia_err)进行进一步分析.
图8、图9 为滤波电感、阻尼电阻发生同方向扰动(均为正向扰动或均为负向扰动)的试验结果,参考式(21),对a相电流跟踪误差进行定量分析,以相电流跟踪 误差作为评价标准,如表4 所示.

表4 电机模拟器物理平台主要参数发生同方向扰动时相电流跟踪误差Tab.4 Phase current tracking error when the main parameters of the EME physical platform are disturbed in the same direction
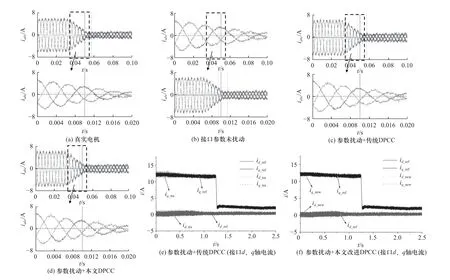
图8 滤波电感、阻尼电阻发生扰动(Li_real=1.6Li、Lo_real=1.6Lo、RC_real=2.5RC)时试验结果Fig.8 Test results for filter inductance and damping resistance with disturbance (Li_real=1.6Li Lo_real=1.6Lo RC_real=2.5RC)
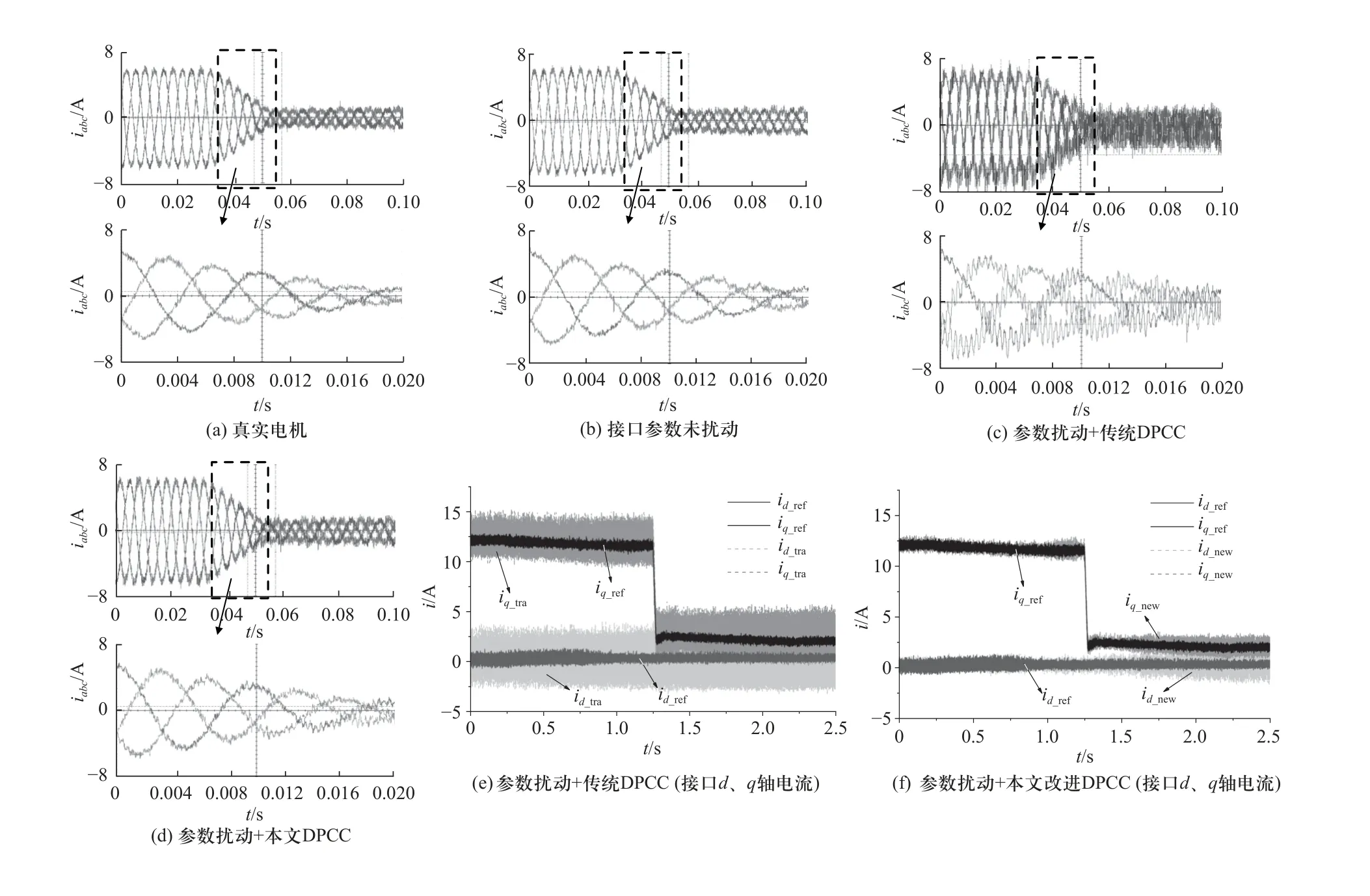
图9 滤波电感、阻尼电阻发生扰动(Li_real=0.6Li、Lo_real=0.6Lo、RC_real=0.7RC)时试验结果Fig.9 Test results for filter inductance and damping resistance with disturbance (Li_real=0.6Li Lo_real=0.6Lo RC_real=0.7RC)
可见,文中方法在滤波电感、阻尼电阻同时发生参数扰动(同方向)时能有效减小参数扰动带来的影响.由表4 可以量化分析得到,相对于参数未发生扰动,当滤波电感为理论值的1.6 倍、阻尼电阻为理论值的2.5 倍时,采用文中方法使参数扰动对a相电流跟踪误差造成的影响由82.79%下降至30.52%;当滤波电感为理论值的0.6 倍、阻尼电阻为理论值的0.7倍时,采用文中方法使参数扰动对a相电流跟踪误差造成的影响由488.63%下降至75.61%.可见采用文中方法使系统鲁棒性明显提升.
图10、图11 为滤波电感、阻尼电阻发生不同方向扰动的试验结果,进一步对a相电流跟踪误差进行定量分析,如表5 所示.

表5 电机模拟器物理平台主要参数发生不同方向扰动时相电流跟踪误差Tab.5 Phase current tracking error when the main parameters of the EME physical platform are disturbed in different direction
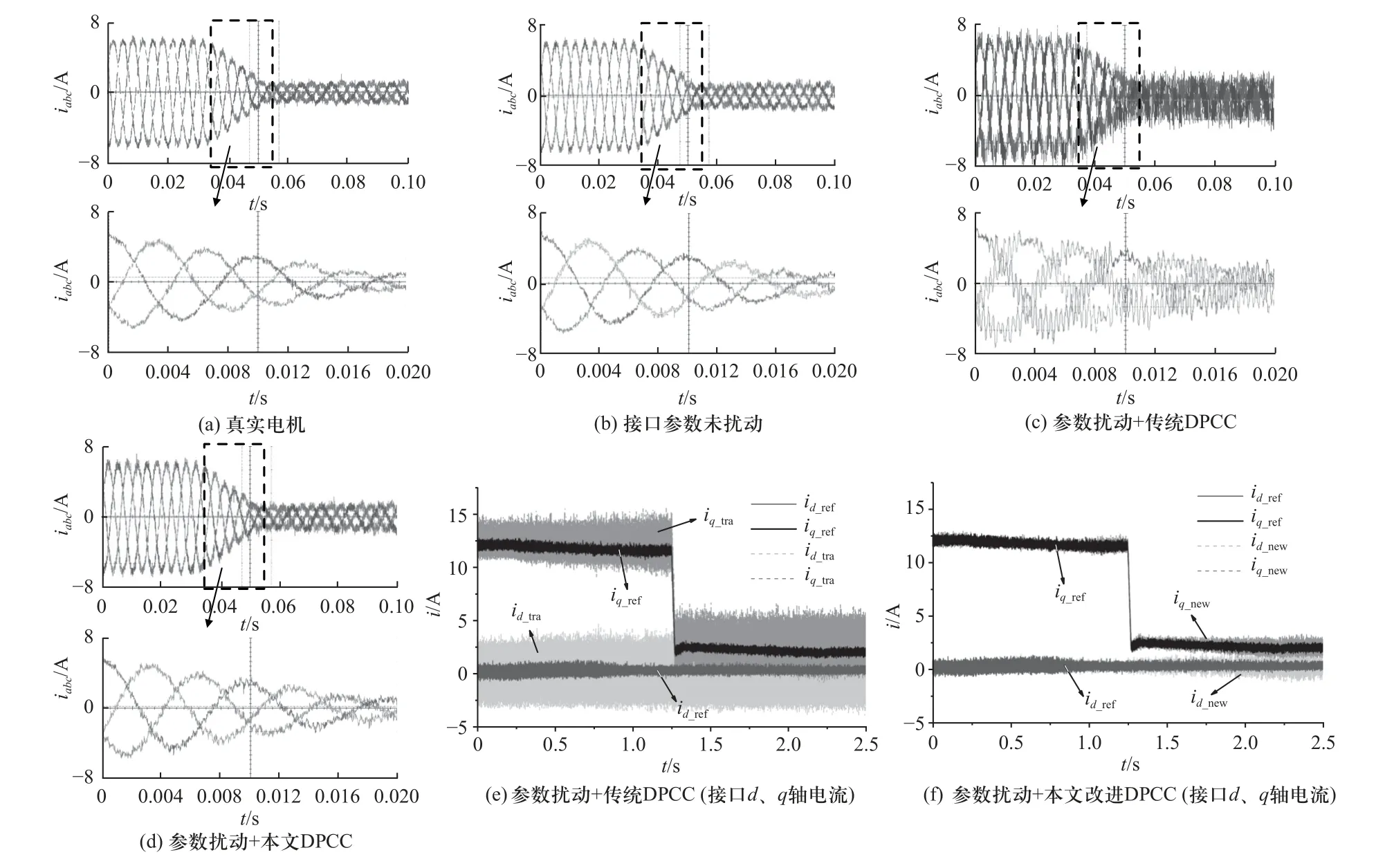
图10 滤波电感、阻尼电阻发生扰动(Li_real=0.5Li、Lo_real=0.5Lo、RC_real=1.5RC)时试验结果Fig.10 Test results for filter inductance and damping resistance with disturbance (Li_real=0.5Li Lo_real=0.5Lo RC_real=1.5RC)

图11 滤波电感、阻尼电阻发生扰动(Li_real=1.6Li、Lo_real=1.6Lo、RC_real=0.7RC)时试验结果Fig.11 Test results for filter inductance and damping resistance with disturbance (Li_real=1.6Li Lo_real=1.6Lo RC_real=0.7RC)
可见,当滤波电感、阻尼电阻同时发生扰动时,无论是发生同方向扰动、还是发生不同方向扰动,文中方法都能有效抑制电流波动.
由表5 可分析得到,相对于参数未发生扰动,当滤波电感为理论值的0.5 倍、阻尼电阻为理论值的1.5 倍时,采用文中方法使参数扰动对a相电流跟踪误差造成的影响由561.41%下降至51.71%;当滤波电感为理论值的1.6倍、阻尼电阻为理论值的0.7 倍时,采用文中方法使参数扰动对a相电流跟踪误差造成的影响由132.78%下降至34.44%.进一步量化地说明了文中方法对系统鲁棒性的提升.
由试验结果可见,文中所构建的电机模拟器物理平台能够实现对真实电机电气特性的可靠模拟,从而在电驱动系统测试工作中达到与传统机械负载台架相近的效果.同时在仿真试验的基础上进一步验证了文中方法的有效性.
4 结 论
文中面向具用LCL 型接口电路的电机模拟器系统,针对传统无差拍电流预测控制算法进行改进,提出一种基于卡尔曼观测器的自抗扰无差拍电流预测控制算法.该方法将参数扰动所造成的影响抽象为补偿电流、补偿电压,利用卡尔曼滤波器的特性构建观测器进行观测补偿,解决了传统方法高度依赖模型精度、对系统参数敏感的问题,提高了控制系统鲁棒性;同时通过观测器实时求解延迟环节,解决了传统方法延迟环节计算耦合复杂的问题.仿真及试验结果证明了文中方法的有效性.文中方法简单可靠,有效抑制因各种外界因素所造成的接口参数扰动的影响,提升了电机模拟器系统的稳定性,符合实际应用需求.
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
制造技术与机床(2017年6期)2018-01-19
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电源技术(2015年9期)2015-06-05
电测与仪表(2015年19期)2015-04-09
装备环境工程(2015年5期)2015-02-28
电测与仪表(2014年11期)2014-04-04