机器视觉图像边缘细节无序增强算法研究
2023-09-20 11:21张姣,张毅
计算机仿真 2023年8期
张 姣,张 毅
(1. 重庆移通学院智能工程学院,重庆 401520;2. 重庆邮电大学先进制造工程学院,重庆 400065)
1 引言
机器视觉系统广泛应用在工业生产中,使机械能够替代人完成重复性强、危险系数高的工作。但现场作业所采集的视觉图像,通常会存在光照不均、边缘细节模糊等情况,为后续的图像识别和特征提取带来较大难度,影响机器的正常操作。为了让机器识别作业更加精准,需要对机器视觉图像的边缘细节进行增强处理。
但当前的图像增强技术应用效果参差不齐,性能完善的不够全面。比如高对比度区域经过增强后很容易出现光晕、或主要构图区域与边缘轮廓产生脱节等现象。
为此,孔祥阳等人[1]研究了一种红外偏振增强算法。基于互结构基础上,利用正则约束完成对图像参数的加权融合,获取图像边缘信息以及轮廓特征,并经过灰度值的优化最终得到增强后图像。该方法对红外图像适应性更好,对其它图像的适应性则不强;陶兆胜等人[2]研究一种分段修复算法,利用修复模板纠正图像错误像素,分段分析图像边缘特征及纹理信息,经过相似度和图像熵的函数运算,完成图像边缘信息修复,但对于无法获取完整信息的模糊部位,其图像增强效果并不明显。
上述二者均存在一定的局限性,为此本文提出一种边缘细节无序增强算法,通过灰度值均衡改善图像亮度不均问题,凸显低灰度区域细节,增强边缘轮廓及线条,平衡后预估图像的原始边缘细节,利用边缘检测算子对预测边缘实施锐化处理,使用双边滤波算法减少过渡部分产生的光晕,对图像及图像整体构造的融合处理,达到整体增强的效果。
2 机器视觉图像灰度均衡处理
首先对采集到的机器视觉图像,利用直方图在密度和距离两个属性向量上,将图像灰度均衡化,强化图像对比度的同时,避免出现图像局部过度增强等不均衡现象,减少图像纹理特征丢失现象[3]。
灰度密度均衡处理,实际上是将目标映射在直方图上,使其灰度均衡分布。由于各个级别的灰度像素点数量差异并不大,因此针对机器视觉图像这类离散图像,直方图变换函数[4]表示如下
(1)
式中ko=mj-1+1,…,mj,i=1,2…,n0,表示图像中的灰度级,sko表示目标图像中不同灰度级别,Pko表示离散后图像灰度,N表示目标图像中存在的像素总数量,Ni表示图像所有像素中灰度级别为i的像素总数量。
调整目标图像中灰度间距,是在灰度均衡基础上通过数量统计以及等间距序列运算实现的。假设目标图像经过灰度的密度均衡后,各级灰度的总数量为Mko,则
(2)
这时可以计算出灰度间的距离变换情况,用函数表示为
(3)
式中,L表示像素间的距离,从距离变换后图像中,找出高质量边缘细节,利用数学运算提取图像的边缘特征。根据灰度间距将目标图像中的灰度级别分组[5],按序列合并子直方图中灰度不为零部分,得出分组数量n,组建图像的映射曲线。将不为零的子直方图视作原始分组,其公式表示为
G(i)=H(ko),H(ko)≠0
(4)
式中,将直方图中不为零部分G(i)的最小概率密度[6]及周围概率密度略小的灰度级相继合并,根据合并组数量均衡处理直方图上像素分布灰度
W=(Mj-Mj-1)/n
(5)
根据图像中每个组内灰度密度具体分布情况,将目标图像转换成灰度图像,并利用映射函数[7]T(ko)将灰度间存在的线性关系表达出来,具体构建过程如下:
假设灰度集G(i)中包含第ko级灰度,且G(i)中还包含其它级别的灰度值,那么映射出的变换关系可表示为

(6)
假设灰度集G(i)中包含第ko级灰度,且G(i)中只存在ko一个灰度值,或者灰度级ko存在位置是在G(i)和G(i+1)之间的,这时映射出的变换关系表示为
T(k)=i*N+Mj-1+1
(7)
假设灰度级ko的灰度值小于第一个灰度集合中最下层灰度,子直方图内映射出的灰度值最小关系为
T(ko)=Mj-1+1
(8)
假设灰度级ko的灰度值大于第n个灰度集合中最大灰度,那么子直方图内映射出的灰度值最大关系为
T(ko)=Mj
(9)
式中,L(i)表示的是第i组集合中最小灰度值,R(i)表示的是第i组集合中最小灰度值,i=1,2,…,n。
进过上述灰度均衡处理后,利用图像函数f(x,y)完成细节的自适应恢复,在2D内积空间L(R)×L(R)中,存在随机感知矩阵[8]Φ,假设对目标图像采取随机采样原则,这时无论是主构图区域还是边缘细节部分,都存在同样的被采集概率,在目标图像中随机采样获取mr个对应测量值,用yr=Φr表示。利用感知恢复算法恢复mr个测量值完成标准压缩,这时所得到的图像属于低质量图像[9]f1=1。
上述的采样方法有效减少了图像测量次数,并在此过程中获得了较为低质的图像f1,利用f1可以达到预测和判断原始图像f边缘信息的目的。
Γ(f)≈Γ(fp)≈Γ[I(f1)]
(10)
式中,当Γ(f)=1时,表示f边缘细节的像素;当Γ(f)=0时,表示f主要构图区域像素;fp表示在低质图像f1基础上通过预测得到的高质图像;I表示预测算子[10],可以完成具体的降噪、去模糊等相关运算过程,Γ表示图像边缘检测计算函数,为方便计算,将f1直接视为高质图像fp,这样一来可以通过对目标图像的边缘Γ(fp)预测获得高质量图像的边缘细节Γ(f)。
这时得到的边缘并不十分准确,想要恢复图像的边缘细节并加以增强,边缘及附近的像素就至关重要,通过数学形态运算提取低质量图像的边缘及细节,以此作为根据,明确采样图像相应重要部位的像素情况,这一自适应过程的具体过程如下
a=Mp[Γ(fp)]
(11)
3 图像边缘细节无序增强实现
通过锐化达到增强像素对比度的目的,突出图像整体细节,针对失真的边缘轮廓,通过对图像高低频的判断,最终利用双边滤波法[12]完成边缘细节的增强。
为了保证图像增强后保持清晰、锐化后不显得突兀,利用边缘检测算子进行锐化,具体过程如下
(12)
∂表示推导因子,继续推导得到更加具体的二维锐化公式
g(x,y)=f(x,y)+α[-∇2f(x,y)]
(13)

(14)
整理出图像最终锐化公式
g(x,y)=(1+4α)f(x,y)-α[f(x+1,y)+
f(x-1,y)+f(x,y+1)+f(x,y-1)]
(15)
其中,α表示图像锐化强弱程度的常数系数,一般为正;若α取值过大,会导致图像过度增强而不自然,若取值过小,则锐化效果不明显,达不到清晰边缘的效果,因此可根据实际图像选取合适的α值[13]。
经过锐化增强过后的图像,其高频区域的灰度无法强调边缘与主构图之间过渡部分,为了保证图像的整个边缘细节都是清晰可见的,利用双边滤波算法消除边缘过渡部分光晕,不仅能够调节图像像素点之间的距离,同时还可以改善像素明暗程度。明暗差异化处理公式为:

(16)
d2(x,y)=(x-xc)2+(y-yc)2
(17)
p2(x,y)=[f(x,y)-f(xc-yc)]2
(18)
式中,d2(x,y)表示目标像素点与图像中心点的距离平方值,p2(x,y)表示目标像素具体灰度值与中心像素灰度值的差值平方,(xc,yc)表示图像中心点像素,σd表示目标图像中像素标准参数,σr表示图像的亮度强弱标准参数。
像素的同态滤波[14]可表示为:
lg[R(x,y)]=lg[S(x,y)]-lg[S(x,y)*G′(x,y)]
(19)
对式(19)实行反向函数变化,得到对应的映射图像R(x,y)。
图像边缘细节增强过后,可能会出现与目标图像主要构图区域明显分离的情况,本文采用融合技术将主要构图与边缘细节完成融合,实现较好的增强效果。融合表达式如下所示
Rg(x,y)=mR1g(x,y)+(1-m)R2g(x,y)
g=R,G,B
(20)
其中,Ri(x,y)表示主构图与边缘细节融合后目标图像的R、G、B值,R1g(x,y)表示图像经过灰度值平衡后的R、G、B值,R2g(x,y)表示经过双边滤波法增强后R、G、B的数值,m表示改变因子,取值满足大于0小于1的条件。
针对细节增强后可能产生严重色差,导致图像成像比例不均衡、甚至颜色失真的情况,提出加入颜色恢复因子Cg[15],经过函数计算完成最终的图像细节增强,过程如下
(21)
式中,F表示目标图像颜色增益系数,λ表示图像亮度调节系数,α表示R、G、B三种颜色数值比例,Sg(x,y)表示目标图像中R、G、B初始色彩比例,最终边缘颜色增强的表达式为
Fg(x,y)=Cg(x,y)Rg(x,y)
(22)
式中,g=1,2,3,Rg(x,y)和Fg(x,y)分别表示颜色边缘颜色恢复前后的色彩比例,完成颜色增强后,最终得出机器视觉图像边缘细节的增强图像。
4 仿真研究
为了验证本文方法对机器视觉图像的边缘细节增强效果,进行仿真,利用不同方法对指定零件图像进行细节增强处理,对比方法为文献[1]提出的一种红外偏振增强算法和文献[2]提出的一种分段修复算法。从定性和定量两方面具体评估增强效果,即从图像能观察到的变化、信息量大小及增强程度来分别衡量。
图1表示通过机器视觉采集的零件图像,可以看出其边缘轮廓相对模糊,很难判断其真实轮廓,因此工业机器无法准确分类和抓取,机器视觉下的原始图像背景整体偏暗,灰度不均衡,因此实验首先对原始图像进行灰度值的均衡处理,三种方法的均衡结果如图2所示。
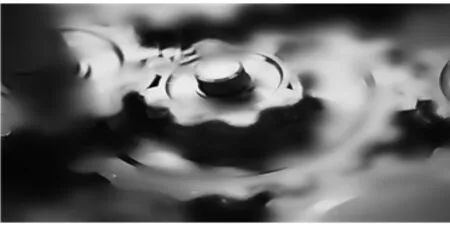
图1 机器视觉下原始图像
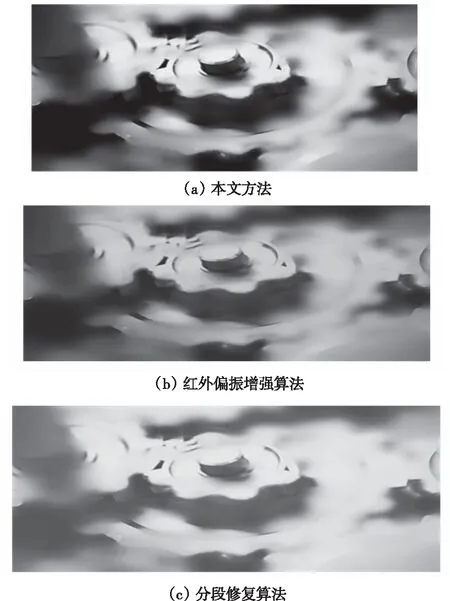
图2 三种方法下图像均衡处理结果
从图2中是三种方法下的直方图均衡处理结果,可以看出,本文方法调整了图像亮度不均的问题,同时拓展了图像的亮度区域,对细节部分做到了小幅度的提升和增强;红外偏振增强算法和分段修复算法下,图像的亮度和对比度都有相应的提升,但曝光也相对增加,经过二者均衡后的图像细节并未得到突显,尤其是经过分段修复算法均衡后,图像细节反而变得更加模糊。
经过灰度均衡处理后,进一步完成对图像边缘细节增强,图3为三种不同方法下针对图像边缘轮廓以及细节的增强结果。
从图3中可以看出,红外偏振增强算法处理后图像边缘、轮廓均有明显的增强效果,但图像还是存在少量残留噪声及背景虚化,分段修复算法下图像过于明亮导致对比度失衡,而经过本文方法完成边缘细节增强后,图像明暗有致,细节刻画完好,边缘及目标轮廓都非常清晰,细节的增强效果更好。
上述实验是对方法的视觉主观评价,为了实验结论更加严谨有效,本文客观地量化图像中信息熵及增强程度,进行进一步判断。熵值表现的是图像中信息量的多少,对比度增益这个指标表现的则是图像增强程度,即图像增强前后的对比度变化,这个值越小表明图像在细节增强过程中,对原始图像的改变越小,具体计算结果如表1所示。

表1 图像增强前后信息计算
从表1中可以看出,经过红外偏振增强算法和分段修复算法完成细节增强后,图像的信息熵仍然较小,表示细节恢复并不完全,而本文方法增强后信息熵明显增加,图像信息得到完善;从对比度增益的比较结果来看,本文方法更好地保留了原始图像的细节,效果更好。
5 结论
由仿真的对比测试结果可知,本文方法在对于图像边缘细节的处理上更加成熟和完善,对于图像明暗变化的处理更加均匀平衡,没有产生过于突兀的亮度不均现象,且经过细节增强后的图像,在保留了原始图像特征的基础上,更有效地完善了图像边缘轮廓和细节,增强效果更好。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
深圳职业技术学院学报(2020年3期)2020-06-19
摄影之友(影像视觉)(2018年12期)2019-01-28
软件导刊(2018年4期)2018-05-15
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
潍坊学院学报(2016年6期)2016-04-18
计算机工程(2015年8期)2015-07-03