机载激光雷达技术在山区河道水电工程测绘中的应用
2023-09-28 03:45林方建
河南水利与南水北调 2023年8期
林方建
(江门市科禹水利规划设计咨询有限公司,广东 江门 529000)
1 山区河道水电工程测绘方法设计
1.1 基于机载激光雷达技术的数据采集
在通过激光扫描技术获取山区河道水电工程的激光三维扫描数据时,文中采取自动化获取数据方式。在具体的执行过程中,使用的仪器设备包括Station Scan 2激光三维扫描仪、相机,以及无人机。其中,Station Scan 2激光三维扫描仪的主要作用是获取山区河道水电工程模型绘制所需的数据信息;相机的主要作用是获取山区河道水电工程表面的纹理信息,增强测绘效果与真实感;无人机的主要作用是为Station Scan 2激光三维扫描仪提供不同数据采集角度,确保采集数据信息的完整性。在具体的执行过程中,山区河道水电工程激光三维扫描数据信息的获取主要包括三个步骤,分别为控制点布设、测量控制点坐标,以及工程数据信息扫描。首先,对于控制点的布设,文章以保障无人机在各个扫描位置的获取数据能够构成完整的被扫描工程实体为目标。考虑到原始扫描结果的数据误差会增加对后续工程概况绘制拼接阶段的误差,因此,文中在具体的作业中减少了扫描位置的选择数量。在测量控制点坐标计算,对控制网进行布设时,采用的工程坐标系中,以零方向为北方向,利用无人机的飞行状态以及所处位置,实现对控制点实际平面坐标信息的测量,对应的高程测量利用了三角高程原理,具体的计算方式可以表示为:
式中:h表示目标工程高程测量结果,H表示无人机的飞行高度信息,v表示无人机的飞行速度,t表示无人机的飞行时间,α表示无人机飞行轨迹与水平面之间的夹角。
按照上述所示的方式,实现对控制点实际三维坐标信息的分析阶段,最大限度保障对应数据采集结果的精度能够满足实际的工程测绘要求。
最后就是对工程数据信息的扫描,文中以控制点的布设处为基点,在其周围架设黑白标靶,将标靶作后视点,通过CMO接口连接笔记本和无人机上的扫描仪。在Cyclone操作框中确定标靶与扫描区域,将其作为机载激光雷达的扫描范围。设置激光雷达的光束散发角度为0.03°(水平)×0.28°(竖直),对应的测距精度控制在3 cm以内(100 m)。在扫描结果中,以标靶的实际位置信息为基准,对所有扫描数据进行同比例校准。其可以表示为:
式中:x(i)、y(i)和z(i)表示机载激光雷达采集到的i 目标位置信息,x(o)、y(o)和z(o)表示机载激光雷达采集到的标靶位置信息,x0(o)、y0(o)和z0(o)表示标靶的位置信息,x'(i)、y'(i)和z'(i)表示校准后的i目标机载激光雷达位置信息。
按照上述所示的方式,实现对山区河道水电工程数据的准确获取。
1.2 山区河道水电工程模型绘制
结合上述获取的山区河道水电工程数据测量结果,为了保障工程模型绘制结果的精准性,文章首先需要对获取的数据进行预处理,针对此,文中采用点云滤波的方式去除原始数据的噪声,之后再利用点云拼接的方式实现对工程模型的构建。需要注意的是,在去除噪声之前,首先需要对噪声作出准确判定。文中高斯滤波法对噪声的过滤方式如图1所示。

图1 高斯滤波法示意图
按照图1 所示的方式,结合采集数据信息的高斯分布特征,实现对原始数据信息中噪声数据的过滤处理。
在此基础上,就可以利用过滤后的数据,采用点云拼接的方式实现对山区河道水电工程模型绘制,需要注意的是,由于原始的数据结果是以分组的形式存在的(具体的分组标准为无人机在不同位置的采集结果),因此,不同组数据之间可能存在不同程度的重叠。针对该问题,文章对山区河道水电工程模型拼接的具体实现方式如图2所示。
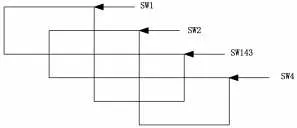
图2 山区河道水电工程模型拼接方式示意图
在图2中,SW1表示拼接结果,按照图2所示的方式,实现对同名点数据信息的匹配,文中设置了三个公共点作为拼接误差的检测基点。当精度达到对应工程的测绘要求时,则保持当前绘制结果;当精度达不到对应工程的测绘要求时,则重新实施拼接,直到达到要求。
按照上述所示的方式,实现对山区河道水电工程模型的绘制。
2 测试与分析
2.1 测试工程概况
在对山区河道水电工程绘制方法应用效果进行分析时,以实际的工程案例为基础开展了对比测试,其中,对照组分别采用以无人机倾斜摄影为基础的工程绘制方法,以及以无人机LiDAR为基础的工程绘制方法。在此基础上,对测试工程的基本情况进行分析,其为山区河道的电力工程,在施工期间,需要按照实际的环境情况搭设电力塔杆结构,对应的总数量为166杆,高度为40 m。在此基础上,分别采用文中设计方法以及另外两种对比方法对其中6个塔杆的施工效果进行分析,并采用人工校验的方式对测绘结果进行评价。
2.2 测试结果与分析
在上述测试环境的基础上,分别统计了不同方法对于电力塔杆的测绘结果,文章以塔杆定端的位置信息为基准,统计得到的数据信息如表1、表2和表3所示。
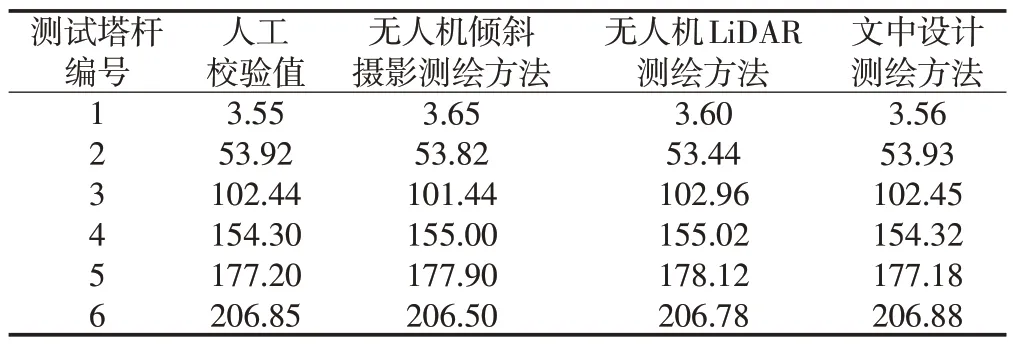
表1 塔杆x坐标测试结果对比表 单位:m
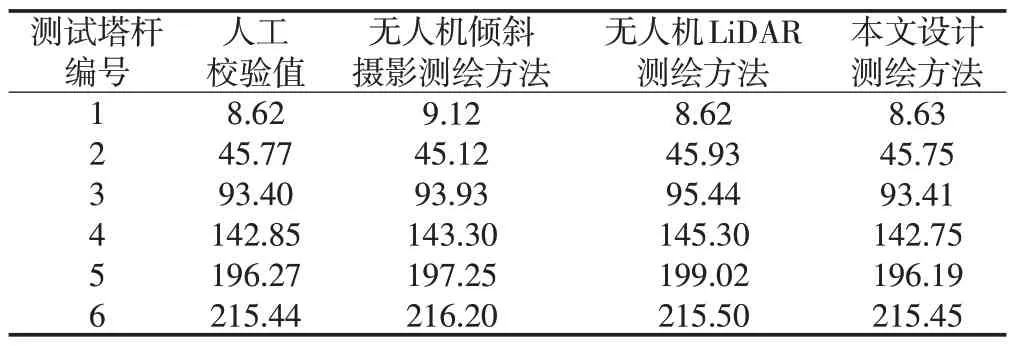
表2 塔杆y坐标测试结果对比表 单位:m
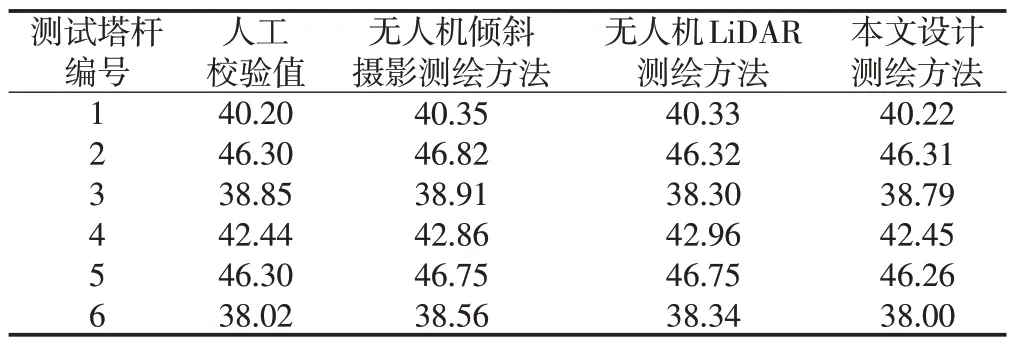
表3 塔杆z坐标测试结果对比表 单位:m
结合表1、表2和表3所示的测试结果可以看出,在三种不同测绘方法下,对于测试电力塔杆具体位置信息的测试结果与人工校验值之间的关系表现出了较为明显的差异。其中,在无人机倾斜摄影测绘方法的测试结果中,整体并未出现大幅度的误差,但是整体误差水平相对较高;在无人机LiDAR测绘方法的测试结果中,整体误差水平表现出了较为明显的不稳定性,最大误差达到了2.50 m以上(如5 号测试塔杆的y坐标),最小误差仅为0.02 m(如2 号测试塔杆的z 坐标)。相比之下,在设计测绘方法的测试结果中,不仅整体并未出现大幅度的误差,且整体误差水平相对较低,始终稳定在1 m范围内。
综合上述,测试结果可以得出结论,设计的以机载激光雷达技术为基础的山区河道水电工程测绘方法可以实现对工程具体情况的精准测绘。
3 结语
借助机载激光雷达技术在数据的采集与处理方面的优势,可以最大限度提高山区河道水电工程施工环境质点云数据测绘结果的可靠性,以此为基础的测绘方法也将为相关工程的综合设计和施工提供良好的指导价值。为此,文章提出机载激光雷达技术在山区河道水电工程测绘中的应用研究,在提高山区河道水电工程测绘工作执行效率的同时,切实实现了对山区河道水电工程测绘工作质量的全面提升,对于山区河道水电工程相关定位工作的开展,以及地质条件勘测工作的有效进行提供了帮助。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
水电站设计(2018年1期)2018-04-12
水电站设计(2018年1期)2018-04-12
电测与仪表(2017年16期)2017-12-19
中国水能及电气化(2016年11期)2016-02-28
水电站设计(2015年3期)2015-12-10
科技与创新(2014年18期)2014-11-12