抗蛇行减振器动态特性对车辆临界速度的影响研究
2023-10-07 06:09肖遥陈楠黄先富
现代交通与冶金材料 2023年5期
肖遥, 陈楠, 黄先富
(中车南京浦镇车辆有限公司,江苏 南京 210031)
引 言
当轮轨接触不良或悬挂参数不合理时,转向架在运行中会出现周期性的横向蛇行运动。蛇行稳定性是车辆系统动力学非常重要的研究领域之一,蛇行运动临界速度决定了车辆最高运行速度,也是保证车辆安全运行的前提[1]。抗蛇行减振器作为车辆二系悬挂的重要元件之一,能够增加车体和转向架之间的回转阻尼,从而抑制车辆系统蛇行运动,大幅度提高车辆临界速度,使得车辆运动稳定性得到极大改善,保证车辆安全运行[2]。因此,抗蛇行减振器的阻尼特性及刚度特性是影响车辆临界速度的关键,研究其动态特性与车辆系统动力学的关系在实际工程应用中具有极其重要的意义。
本文以某设计运行速度为120 km/h的地铁车辆转向架为试验平台,基于机车车辆滚振动试验台,研究了不同轮轨匹配关系下抗蛇行减振器的动态特性对车辆蛇行稳定性的影响,为后续转向架用抗蛇行减振器参数选型提供参考。
1 抗蛇行减振器阻尼特性理论模型
油压减振器的阻尼特性直接反映了减振器的功能特性,是其最重要的性能指标之一。根据减振器的运用条件不同,可以将阻尼特性分为静态特性和动态特性。
1.1 静态特性
当不计减振器内部结构、油压以及气泡引起的动态影响,从而没有力与速度之间的相位变化时,这种特性称为减振器静态阻尼特性。可以用图1所示的示功图及阻尼特性曲线表示[3]。静态阻尼特性主要建立在减振器做大振幅和低频运动的基础上。
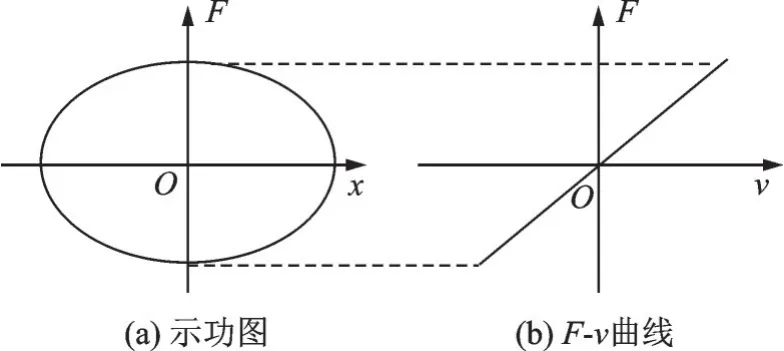
图1 静态阻尼特性Fig.1 Static damping characteristics
减振器的阻尼系数c可以表示为:
1.2 动态特性
实际振动过程中,油压减振器端部橡胶连接结构、油液可压缩性及循环方式等因素会使其在轴向运动时表现出一定的刚度效应,导致减振器阻尼力与活塞速度之间产生相位差,这种既表现阻尼效应又有刚度效应的特点称为动态阻尼特性。Maxwell模型是理论研究减振器动态特性最经典模型之一[3],如图2所示,将减振器简化为由阻尼与弹簧单元串联而成的系统。其中,ka表示减振器的串联刚度,由安装座刚度、油液刚度及橡胶节点刚度等效而成;ca表示减振器阻尼率。
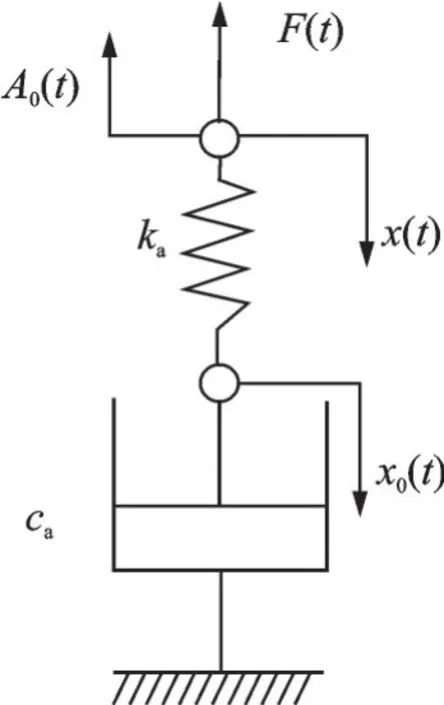
图2 Maxwell模型Fig.2 Maxwell model
当减振器端部受到正弦激励为x(t)=A0·sin(ωt),可以推导得出减振器的动态刚度和动态阻尼系数分别为:减振器动态特性表现如图3所示。
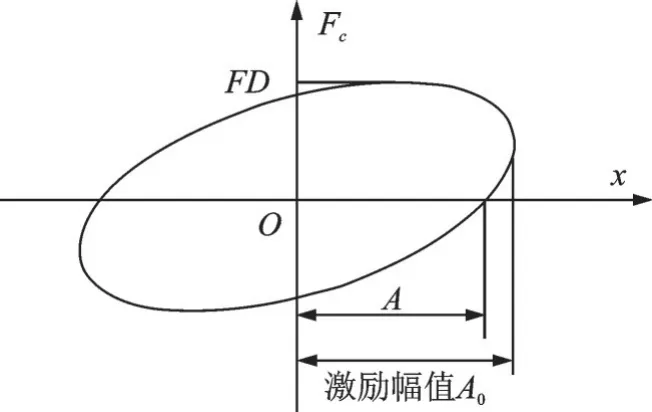
图3 动态特性示功图Fig.3 Dynamic characteristic indicator diagram
式中φ表示激励位移与阻尼力的相位角;A0为激励振幅;A为活塞振幅;FD为阻尼力;ω为振动角速度。减振器动态特性表现如图3所示。
地铁车辆正线运行时,车辆的垂向减振器和横向减振器振幅一般在10~15 mm,表现为静态阻尼特性。而抑制转向架蛇行运动的抗蛇行减振器发生失稳时工作位移一般在3 mm以内,处于小振幅下的工作状态,主要是动态特性发挥作用[4]。此外,随着轮轨等效锥度的增加,蛇行频率逐渐增大,导致抗蛇行减振器的工作频率也相应增大。因此,分析抗蛇行减振器的动态特性是研究抗蛇行减振器对车辆蛇行稳定性影响的基础。抗蛇行减振器安装实景效果如图4所示。

图4 抗蛇行减振器实景照Fig.4 Anti-yaw damper realistic photos
2 抗蛇行减振器动态特性试验
2.1 试验设备
为了研究不同性能参数抗蛇行减振器的动态特性,选取了2个厂家的4种不同参数的减振器作为研究对象。表1给出了4种不同参数的抗蛇行减振器静态阻尼数据。
其中,抗蛇行减振器方案1~3为同一生产厂家,方案1和方案2为同一系列双循环线性减振器,其内部结构大致相同,方案3为单循环结构减振器。
依托西南交通大学牵引动力国家重点实验室液压减振器试验台[5],分别对4种方案抗蛇行减振器进行动态特性试验。试验前,将减振器置于环境温度(17~23 ℃)中至少24 h。试验时,采用水平加载方式模拟减振器实际装车状态,对抗蛇行减振器进行正弦激励加载,测定不同激励下的抗蛇行减振器力与位移的数据。根据抗蛇行减振器常用工作频率及工作位移设定试验工况,试验工况如表2所示。

表2 抗蛇行减振器动态特性试验工况Tab.2 Anti-yaw damper dynamic characteristic test condition
2.2 不同抗蛇行减振器动态特性试验分析
不同参数方案的抗蛇行减振器动态刚度随频率变化的特性曲线如图5所示。在低频区域,振动频率较低(小于2 Hz)时,减振器的振动速度较低,阻尼力幅值较小,随着激励频率的增加,动态刚度不断增加;而随着振动频率的继续增加,减振器振动速度增加,减振器在工作中周期性进入卸荷区间,阻尼力幅值基本维持在卸荷力附近,示功图偏转趋于平缓,动态刚度增长趋于缓慢,直到接近不变。

图5 不同抗蛇行减振器动态刚度频变特性Fig.5 Dynamic stiffness frequency variation characteristics with different anti-yaw dampers
激励振幅为1 mm和2 mm时,不同参数方案减振器的动刚度频变特性对比曲线如图6所示。可以看出,在振幅为1 mm工况中,相较而言,当激励频率大于2 Hz时抗蛇行减振器动态刚度较大。在激励幅值越高的工况下,越容易使减振器振动速度达到卸荷速度,越早出现卸荷情况,所以随着幅值的增加,动态刚度越快达到平缓状态,并且在较低的工况中,更容易达到较高的动态刚度。
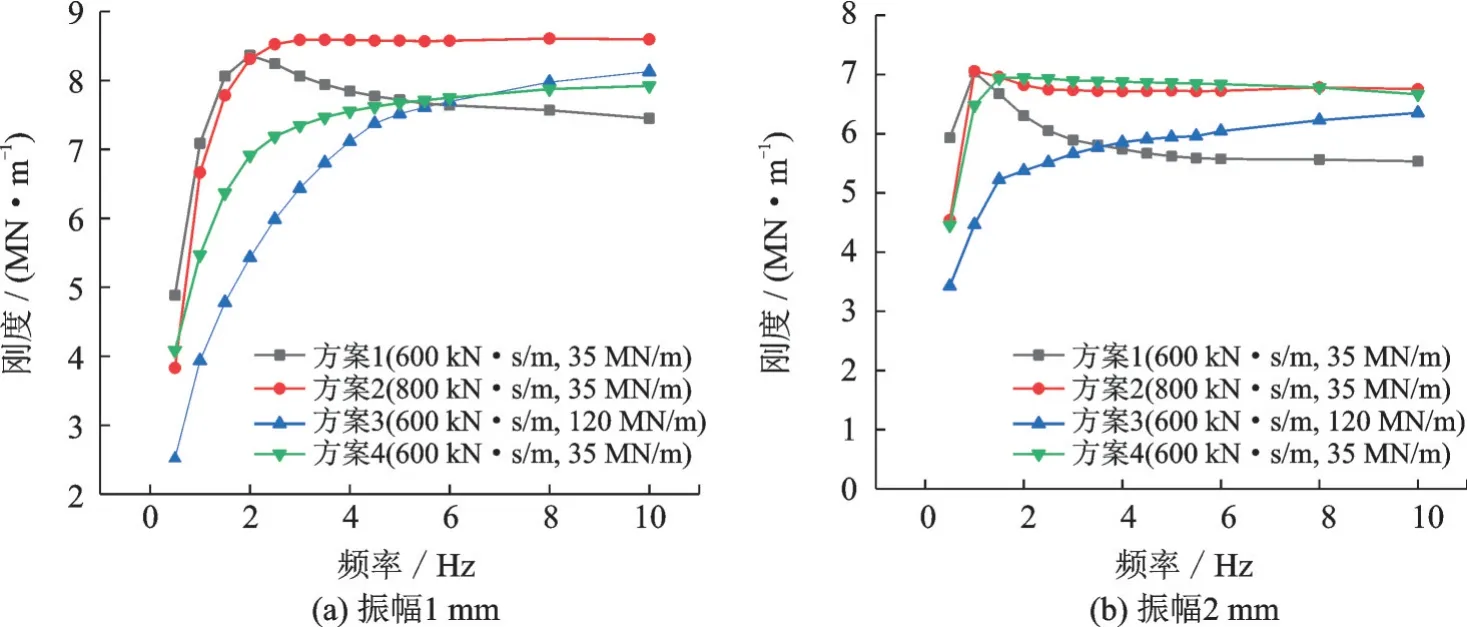
图6 不同振幅时抗蛇行减振器动刚度频变对比Fig.6 Anti-yaw dampers dynamic stiffness frequency variation comparison at different amplitude
图7为各抗蛇行减振器动态阻尼率随频率变化的特性曲线。由图7可知,当减振器激励幅值较低时,随着频率的增加,动态阻尼率增加;随着频率继续增大,抗蛇行减振器阻尼阀系统中除了节流孔外其他溢流阀顺次开启,造成动态阻尼率增加的速率趋于平缓。当减振器激励幅值较高时,低频阶段动态阻尼率随激励频率的增加而增加,高频阶段随频率增加而减小。这是因为高频时减振器进入卸荷区间,阻尼力幅值基本维持在卸荷力附近,频率增加,动阻尼率减小。此外,在激励幅值越高的工况中,随着频率的增加越早地出现卸荷情况,因此动态阻尼率峰值所对应的频率随着幅值的增加越小。

图7 不同抗蛇行减振器动态阻尼率频变特性Fig.7 Dynamic damping rate frequency variation characteristics with different anti-yaw dampers
汇总图7各方案结果得到图8,图8给出了激励振幅为1 mm和2 mm时,不同方案抗蛇行减振器的动阻尼率频变特性对比。可以看出,在激励振幅为1 mm工况下,当频率大于3 Hz时,抗蛇行减振器方案1的动态阻尼率最小,方案3次之。在激励振幅为2 mm工况下,当频率大于2 Hz时,方案1的抗蛇行减振器动态阻尼率最小,而方案4的抗蛇行减振器动态阻尼率最大。
3 蛇行失稳临界速度试验
3.1 试验台
为了研究抗蛇行减振器动态特性对车辆蛇行运动稳定性的影响,本文以某设计运行速度为120 km/h的地铁车辆转向架为试验平台,基于西南交通大学机车车辆滚振动试验台进行整车动力学试验[6]。试验台如图9所示。该试验台模拟轨道的滚轮可同时进行滚动和横向、垂向激振,以模拟车辆在实际线路上的运行工况。试验台除机械总体外,还有驱动控制系统、激振控制系统和总监控系统,可进行电机的驱动控制,实现4根轴的同步转动控制,以及各激振器的激振输入控制。
3.2 试验工况
在实际运行中,轮轨接触几何关系会随着车轮磨耗、线路参数而改变,对车辆蛇行运动稳定性的影响较为显著。等效锥度是表征轮轨接触几何关系最直接、最重要的参数,随着车辆运营里程的增加,等效锥度会增大[1]。因此,本文选用了新轮、磨耗轮两种不同等效锥度的车轮进行运行稳定性试验。
试验工况如表3所示。新轮等效锥度为0.132,磨耗轮等效锥度为0.56,模拟的工况更为恶劣。因地铁车辆某型转向架最高设计速度为140 km/h,根据GB 32358的要求,当被试车辆安装新轮时,最高试验速度为185 km/h;当安装磨耗轮时,最高试验速度则为170 km/h。在进行试验时,采用速度分级方法,滚振至车辆失稳为止,以获得有效的车辆出现失稳的临界速度和失稳后恢复稳定的临界速度,在车辆不失稳的前提下试验速度要达到180 km/h。图10为试验现场图。
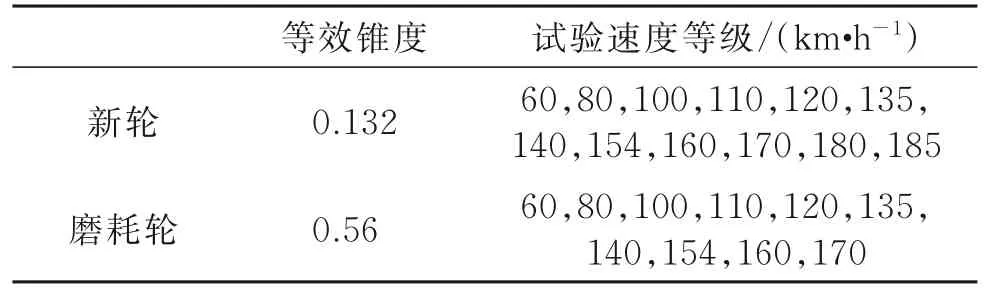
表3 蛇行运动稳定性试验工况Tab.3 Snake motion stability test condition

图10 滚振动试验现场图Fig.10 Rolling vibration test site diagram
3.3 抗蛇行减振器动态特性对车辆临界速度的影响
3.3.1 新轮状态
表4为新轮状态时空车在不同抗蛇行方案下车辆运行数据。结果表明,仅采用方案1参数下的抗蛇行减振器发生了失稳现象,失稳速度为180 km/h。抗蛇行减振器的失稳频率约2~3 Hz,振幅约2~3 mm。
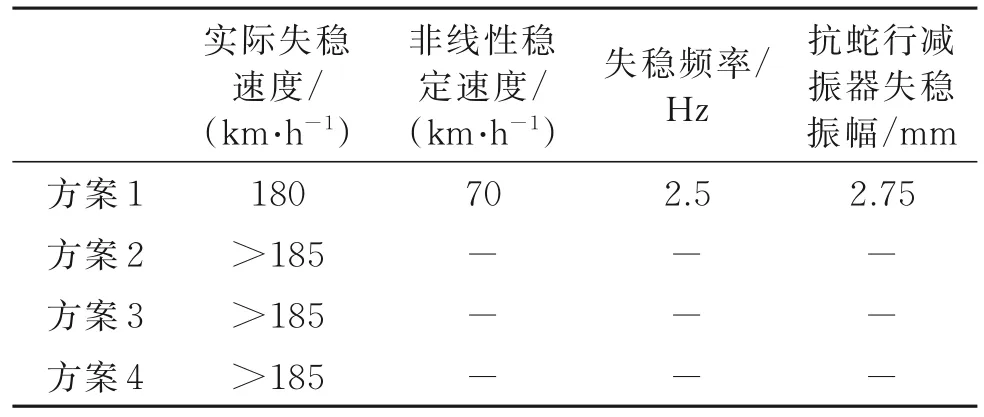
表4 新轮状态时不同方案下运行数据Tab.4 Running data under different schemes during new wheel status
结合图6和图8对四种方案抗蛇行减振器动刚度及动阻尼特性的对比分析发现,当激励振幅为2 mm,频率大于2 Hz时,方案1参数下的抗蛇行减振器动态阻尼率最小,但其动刚度并非最小。由此可以得出,在新轮状态下,在试验采用的地铁车辆某型转向架平台和此新轮接触几何关系下,动阻尼率对车辆的临界速度影响更明显,动阻尼率越大,对临界速度越有利[6]。同时,在此状态下,建议选择在激励振幅约2~3 mm,频率2~3 Hz范围内动阻尼系数更大的抗蛇行减振器。
3.3.2 磨耗轮状态
磨耗轮状态时不同抗蛇行方案下车辆运行数据如表5所示。在磨耗轮状态下,采用抗蛇行减振器方案1和方案3的工况均出现失稳情况,抗蛇行减振器失稳频率约4~5 Hz,失稳振幅约0.5~1.5 mm。相较于新轮状态下抗蛇行减振器的失稳频率,磨耗轮状态下减振器失稳频率增大。此外,对比新轮状态时的失稳工况,在磨耗轮状态下车辆失稳后非线性稳定速度较高,均在100 km/h以上。
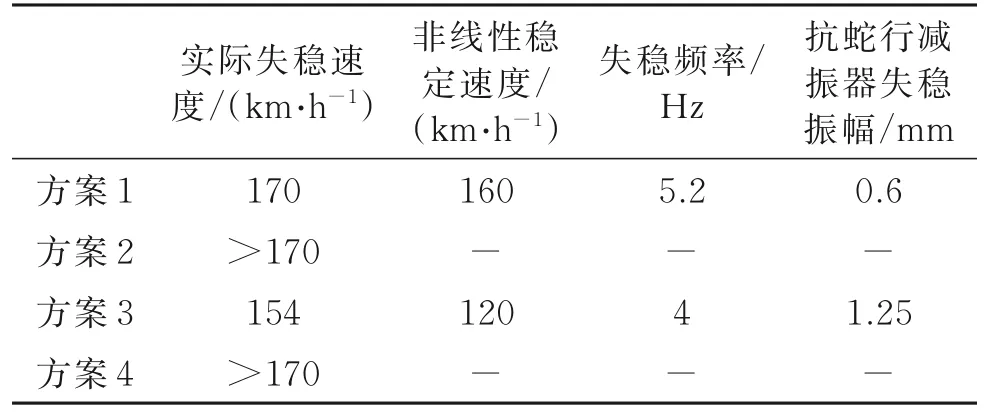
表5 磨耗轮状态时不同方案运行数据Tab.5 Running data under different schemes during wear wheel status
结合图6(a)和图8(a)对动态刚度和动阻尼率的分析发现,当激励振幅为1 mm,频率大于3 Hz时,抗蛇行减振器方案1下的动态阻尼率最小,方案3次之,而激励下方案1与方案3的减振器动刚度并非最小。由此可以得出,在试验采用的地铁车辆某型转向架平台和此磨耗轮状态下,在振幅0.5~1.5 mm,频率4~5 Hz的范围内,需选择动阻尼系数较大的减振器。
综合对各方案下抗蛇行减振器动态特性的对比及滚振动试验结果,可以得出,方案1参数下的抗蛇行减振器动阻尼率较小,其在新轮及磨耗轮状态下均发生了失稳,因此此款抗蛇行减振器并不适用于该型地铁车辆转向架。方案4参数下的抗蛇行减振器在车辆蛇行稳定性试验中表现最优。
4 结 论
本文以4种抗蛇行减振器作为研究对象,分析了不同参数下抗蛇行减振器的动态特性;基于机车车辆滚振动试验台及某型地铁车辆转向架平台,从试验角度研究了抗蛇行减振器动态特性对车辆蛇行失稳临界速度的影响,为抗蛇行减振器在转向架平台中的选型及应用奠定了基础。可以得出以下结论:
(1)抗蛇行减振器动态刚度随激励频率的增加逐渐增大后趋于平缓,在幅值较低的工况中可以达到较高的动态刚度。而动阻尼率随频率增加呈现出先增加后逐渐下降的趋势,随着幅值的增加,动态阻尼峰值所对应的频率越小。
(2)在4种抗蛇行减振器方案中,方案1参数下的抗蛇行减振器动阻尼率较小,不适用于地铁车辆某型转向架,方案4参数下的抗蛇行减振器在车辆蛇行稳定性试验中表现最优。
(3)在试验采用的地铁车辆某型转向架平台和此轮轨接触几何关系下,动阻尼率对车辆的临界速度影响更明显,动阻尼率越大,对临界速度越有利。
(4)考虑到抗蛇行减振器运用于小振幅的工作状态下,主要以动态特性发挥作用。因此,在抗蛇行减振器选型时,更应该关注其在实际工作状态下的动态刚度和阻尼率,为车辆系统动力学仿真以及车辆实际运行工况提供可靠的数据支撑。
猜你喜欢
计算机测量与控制(2023年8期)2023-08-30
军民两用技术与产品(2021年1期)2021-07-28
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
中国工程机械学报(2019年4期)2019-08-06
铁道机车车辆(2019年3期)2019-07-29
振动工程学报(2019年2期)2019-05-13
数学物理学报(2016年6期)2016-04-16
九江学院学报(自然科学版)(2015年2期)2015-11-12