基于深度网络的三相异步电动机故障检测
2023-10-17 08:33史玉芳
电气传动自动化 2023年5期
史玉芳
(徐州机电技师学院,江苏徐州 221131)
电机及其部件的状态监测(CM)是防止其损坏和避免资源浪费的必要措施。检测机器或其部件的异常状态可以提高安全性,延长机器寿命。检测这些状态需要测量转子和定子电流、气隙中的磁场或电机不同部分在正常或者故障情况下的热特性等量,以便进行比较。无创技术通过外部测量而不打开电机或嵌入传感器内,具有很大优势。因此,基于机器学习技术测量结果的自动评估对研究人员来说具有很大的用处。由于电动机的故障经常导致局部或全局温度升高,所以可以通过测量热模式来检测故障类别。图1 显示了感应电动机等旋转电机基于热成像的自动故障检测系统的总体框架。如图所示,通过一些预处理操作来检测故障关注区域(ROI),改进了输入图像[1-2]。然后,从该区域提取基于直方图的判别特征,统计动量,频域或共现矩阵特征检查,基于卷积神经网络(CNN)的特征等。最后,提取的特征或从降维获得的特征用于训练合理的分类器,如神经网络、判别分析、模糊系统、支持向量机、决策树等。

图1 自动故障检测系统框图
本研究的主要目的是将三相异步电动机电气故障的热图分类作为一种无创、无损的方法进行研究。将一个简单预先训练的CNN 取名为AlexNet并用作一个特征提取器,无需其他额外学习。与VGG相比,为了增强这种简单的特征提取器,提出了一种基于级联的鲁棒关注区域检测器(使用SIFT)的流水线,使用预先训练的深度神经网络从关注区域提取鉴别特征,基于K-means 均值算法对提取的特征向量进行聚类,并运用支持向量机(SVM)分类器的泛化能力,进行故障检测。
1 拟议方法及理论分析
本文提出了一种基于红外图像的异步电动机故障检测方法。该方法的摘要如下,首先,每个图像中都检测到ROI。然后,提取的关注区域基于预先训练的卷积神经网络表示,这些代表性的训练样本被K-means 聚类成两个冷热簇,在每个聚类中应用相应的支持向量机对训练样本进行分类。在测试阶段,对于输入的测试图像,在提取其关注区域(ROI)并对其进行新的表示之后,确定相关的聚类。最后,激活其相应的支持向量机,以确定电机故障的类型。
1.1 ROI 提取
正确提取关注区域并去除背景对于提高测试图像的匹配精度和训练图像有重要作用。为此,在一个通用框架中,首先从一组参考图像中提取出一组正常状态的本地特征或关键点。对于一个测试图像,来自它的每个特性都与引用的关键点进行了单独的比较。
关注区域检测面临两个问题:一方面,运动机体图像的空间/热对比度在运行初期和运行过程中或发生严重故障时是不同的。另一方面,在两种不同的成像方式下,从相机到电机的距离是不一样的。
在此研究中,为了同时解决这些问题,应用了广泛使用的SIFT 来提取ROI,在两个温度下的两幅运动机体图像被用来对应于冷和热的范围作为参考图像。然后,从这些模板中提取100 个局部特征点并存储,从每个测试图像中提取出300 个基于SIFT的局部特征。在实验中,运用最近的网格为基础最佳仓优先搜索方法来确定最佳匹配的关键字。
通过将图像中的每个关键点与存储的关键点进行比较和匹配,可以在图像中检测到电机本体。值得注意的是,电机的刚性三维形状适合基于SIFT 的关键点提取和匹配。因此,提出的ROI 提取策略是稳固状态下的平移、旋转及鲁棒性的温度变化。
1.2 训练CNN 作为特征提取器
从输入热图中提取的关注区域用卷积神经网络表示。在神经网络训练过程中,网络的不同层次检测图像不同区域的空间/热依赖性,并将其置于最终的特征向量中。在这项工作中,我们使用事先训练好的AlexNet 作为特征提取器[3-5]。AlexNet 体系结构包括五个卷积层以及最大池层和三个完全连接的层。
完全连接层的输出连接到一个软最大层与1000 个条目,使用1000 个标签。在这个网络中,相关函数功能被用作完全连接层的激活函数。在这种结构中,第一卷积层滤波器的输入图像为227×227×3,大小为11×11×3 的96 个核,步长为4 个像素。第一层的输出用作第二层的256 个5×5×48 的核进行滤波,在第三层,384 个3×3×56 的核与第二层的输出相连,第四层和第五层分别有348 和256个核,这些核的大小为3×3×192,每个完全连接的层包括4096 个神经元,这样,每个热图被转换成一个4096 元组的特征向量。
1.3 损失函数
在对网络进行训练时,给出一组热像作为训练样本,图像中的每个设备部分都注释有一个定向包围网格和一个类标签作为实际环境真实值,该网络既能预测定位结果,又能预测分类结果,是一个多任务学习问题。因此,我们设计了一个多任务损失函数Λ,其中包括一个本地化损失Λloc,分类损失Λcls,以及一个损失Λort,限制部件之间的方向角度是一致的,如下式:
用t=(tx,ty,tw,th,tθ)表示预测边界框的位置,虽然多边界框是预测,但是我们期望只有一个最高的与地面实际情况的交叉点组合来预测部分设备。因此,我们使用指示符来表示第i 个单元格中的第j 个预测边界框是可信任的部分,如果不是,则使用指示符来表示。在本地化学习中,只有那些可信任的网格才是重要的。与此同时,一个所得分数sij也提供了衡量这个预测的可信度。如果网格是准确的,那么分数应该是很高的,否则就是无可信度。为此,本地化损失的设计如下:
其中p^是表示分类基本逻辑的K 维二元向量。它是所有0 项中的一个,除了对应于标记类的一个,该类被设置为1。
2 实验及评估
为了评估提出方法的性能,实验装置和三相感应电动机数据为1.1kW 发动机,2800n,工作频率50Hz,工作电压220/380V。在此基础上,研究了该三相异步电动机的不同工况,如正常运行、转子堵塞、冷却风扇堵塞、定子绕组短路等。
由于从不同的视角进行成像,检测到的ROI具有不同的大小。基于SIFT 检测到的关注区域被重新调整到180×127 像素,然后通过卷积神经网络转换成一个4096 元组的特征向量。在每个数据集中,70%的数据被随机分配给训练数据,30%被随机分配给测试数据。将数据集分区重复10 次,并报告多次运行的平均准确性。
利用K-means 算法将训练特征向量分为两类。通过观察每个簇类的原型,可以解释为根据相应图像的温度范围对样本进行聚类。因此,这些簇团被命名为热簇团和冷簇团。在多次运行的Kmeans 算法中,数据集的一个特定类的原型I 改变了它的聚类。研究决定这个原型存在于两个簇团中。因此,冷团簇和热团簇分别包括来自七个和五个不同类别的例子。
在这个步骤中,每个检测到的ROI 样本被分配给一个集群,其原型更接近该样本。在训练阶段,其特征向量有的在冷团簇中聚类,有的在热团簇中聚类。训练一个基于支持向量机的二值高斯核分类器对每个聚类的训练样本进行分类。
在这项工作中,平均检测率(跨越多个运行的数据集划分)和混淆矩阵说明是用来评估建议流程的性能。分类的准确性,即平均检测率,按下式衡量:
其中,TCs、FCs分别是分类样本的真假数目。
根据公式可以得出结论,支持向量机不足以实现良好的故障状态检测。因此,运用一种使用多层次决策的方式。第一个聚类单元确定测试图像的类别,然后将这些类别输入到相应的分类器中,预测其出现的故障类别。
针对KNN 分类器和随机分类器对提出的流程进行了评估。实验结果如表1 所示。基于SVM 的分类器性能优于KNN 和RF。因此,基于支持向量机的分类提高了流程的泛化能力。实验结果表明,所提出的故障检测流程能够对电机运行故障进行准确的预测。
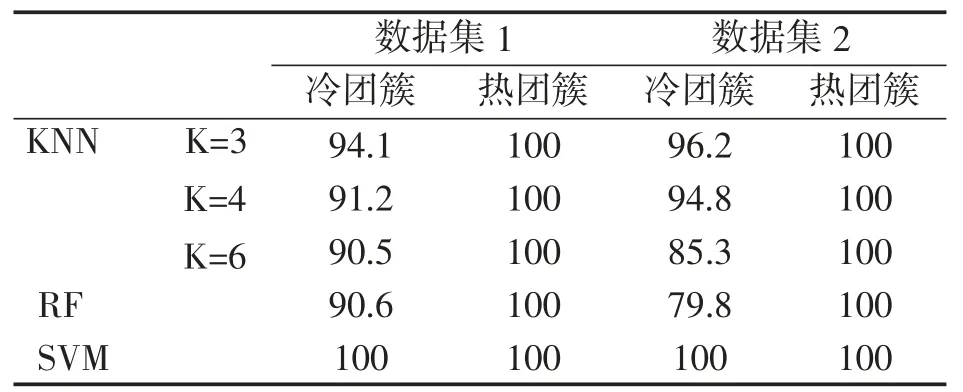
表1 用于不同分类器的平均准确率(%)
3 结论
本文提出了一种基于深度网络特征的热像图处理三相异步电动机故障无创自动检测方法。为此,研究了基于SIFT 的关注区域检测,运用了CNN 的特征提取,K-means 算法和基于SVM 的分类器。由于电机的三维形状是刚性的,所以在该算法中采用了SIFT 算法进行关注区域检测。由于不同的图像采集条件和视点,检测到的关注区域大小不同。因此,基于SIFT 的检测关注区域被重新调整到180×127 像素。与其他方法相比,归一化ROI 直接提取到基于CNN的特征提取器中,不需要任何预处理或额外的学习。本文运用AlexNet 进行此实验的研究。基于CNN 的特征提取后,将训练后的4096 元组向量提交给两阶段决策单元。在决策单元的第一阶段,采用K-means算法将特征向量聚类为两组冷样本和热样本。
在测试阶段,将归一化检测到的关注区域提供给预先训练好的CNN,并将其4096 元组特征向量提供给相应的基于支持向量机的分类器。从感应电动机中收集了包括来自不同视角的真实热图像的数据集。通过实验对这种简单算法的性能进行了评价。提出的检测方式在多次运行中的100%准确性,表明其性能优于其他方式。对于未来的工作,我们正在扩展数据集多视图成像的电机。之后,将努力建立其三维热图在多种运行状态的故障检测。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
保定学院学报(2022年2期)2022-04-07
许昌学院学报(2018年4期)2018-05-02
电子测试(2018年1期)2018-04-18
电子测试(2017年15期)2017-12-18
中华建设(2017年1期)2017-06-07
雷达学报(2017年6期)2017-03-26
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
电子设计工程(2015年6期)2015-02-27