基于倾斜影像密集匹配点云的建筑物提取
2023-10-18 13:32殷嘉媛
科技创新与应用 2023年29期
殷嘉媛,袁 枫
(宿迁学院,江苏 宿迁 223800)
建筑物是人们为了满足社会生活需要,利用所掌握的物质技术手段,并运用一定的科学规律、风水理念和美学法则创造的人工环境。建筑物三维模型是摄影测量、计算机视觉、计算机图形学等领域的重点研究问题,受到广泛关注[1]。随着数字城市、智慧城市的快速发展,建筑物三维模型在城市规划、应急救援、减灾、决策辅助及无人驾驶等领域有着越来越多的应用需求[2-3]。机载激光雷达、倾斜摄影测量等新型测绘技术使得建筑物的三维重建相比传统航测方法在自动化程度、精度、信息丰富程度等方面有了较大的进步[2-4]。
由于激光雷达(LiDAR)点云成本远高于高分辨率航空或卫星影像,所以,利用高分影像提取建筑物仍是建筑物提取的重要手段;同时倾斜航空影像具有建筑物立面可见、遮挡少的特点,是建筑物提取的优质数据源[5-7]。另一方面,倾斜摄影测量技术得到的场景模型是一个整体,能良好地满足视觉上的观感,但不能实现计算机对目标对象的识别、属性的赋予且不利于后期的GIS 应用。因此,还需要实现目标的语义分割,尤其是建筑物的单体化建模。目前建筑物单体化建模大多是采用在整体模型上交互描绘、编辑的方法,显然其工作量大、效率低,难以满足大规模城市快速、高效建模的需求。
建筑物屋顶主要是由单个或多个平面组成,其轮廓大多为直角类型,据此本文提出了一种基于倾斜影像密集匹配点云数据的建筑物提取方法。首先采用布料模拟点云滤波(Cloth Simulation Filter,CSF)算法对原始点云进行滤波[8],去除地面点,并根据颜色信息滤除植被点;然后对剩余的点进行平面分割,获取各个平面片的面积、宽度等几何属性及其拓扑关系,并根据相关特征对平面片点云进行优化,得到建筑物单体点云;最后采用Alpha Shape 算法获取单个建筑点云的轮廓点[9],并利用递归最小外接矩形(Recursive Minimum Bounding Rectangle,RMBR)算法对建筑轮廓进行规则化[10],得到规则化后的建筑物轮廓。
1 倾斜影像密集匹配点云建筑物提取
1.1 倾斜影像密集匹配点云数据预处理
倾斜影像密集匹配点云主要包括地面点、植被点、建筑物点等,通过预处理滤除地面点、植被点能有效提高后续建筑物提取的精度。
1.1.1 倾斜影像密集匹配点云滤波
点云滤波主要用于分离地面点和非地面点,是建筑物提取的关键步骤之一。与大多数为达到较高的精度需设定复杂参数阈值的滤波的算法不同,CSF 滤波算法需要设置的参数较少,并且滤波效果较好[8],因此本文采用CSF 滤波方法对倾斜影像密集匹配点云进行滤波。CSF 滤波方法近似于一个单一的物理模拟过程,首先将原始点云倒置,然后将一块布平铺于倒置的表面,由于重力自然下垂,布料足够柔软并粘贴在地形上,确定布的形状,即描述地面点。倾斜影像密集匹配点云如图1 所示,滤波后的地物点云如图2 所示。
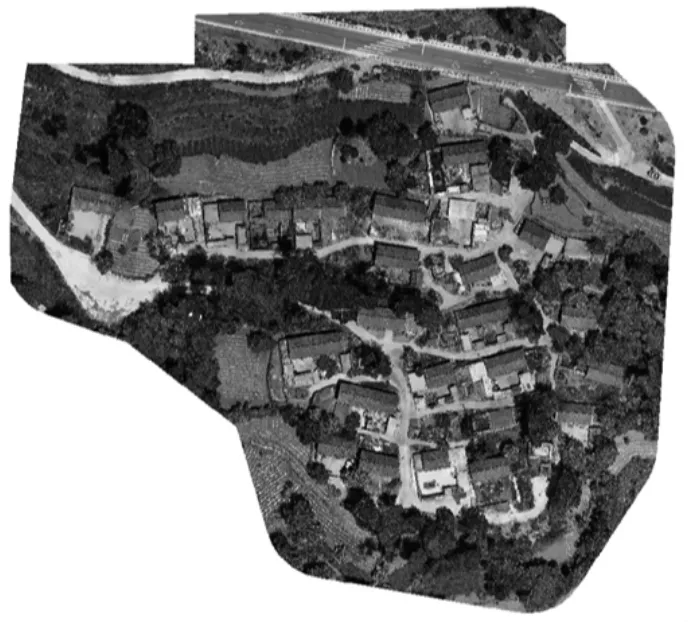
图1 倾斜影像密集匹配点云

图2 滤波后地物点云
1.1.2 植被点云剔除
由于高大植被与建筑物存在高度相似、空间相邻等关系,从而影响建筑物点精确提取的效果,因此需要从非地面点云中检测并剔除植被点。通常,倾斜摄影测量系统搭载普通可见光相机,无法得到广泛应用的基于红-近红外的植被指数,因此本文采用绿叶指数(Green Leaf Index,GLI)检测植被点。绿叶指数表达式如式(1)所示
式中:R、G、B分别代表点的R、G、B 通道的值。
植被点云剔除的具体过程为:①按照式(1)计算非地面点云中各点的GLI值;②根据各点的绿叶指数,由最大类间方差(OSTU)方法计算阈值TGLI;③将GLI值大于TGLI的点认为是植被点并剔除。
1.2 建筑物点云精确提取
建筑物屋顶主要是由单个或多个平面组成,因此平面特征是建筑物的主要特征之一。从倾斜影像密集匹配点云中快速、准确地提取出平面,并根据平面几何特征等对平面进行筛选、组合等处理,可以得到建筑物屋顶面,进而准确地提取出建筑物。
1.2.1 基于RANSAC 算法的点云快速平面分割
RANSAC 算法作为模型拟合方法的一种,自提出以来,在计算机视觉、摄影测量等领域得到了广泛的研究与应用。基于RANSAC 算法对三维点云进行平面分割的步骤如下。
1)计算最小抽样数M。
2)从点云数据集中随机选择m(m=3)个点并计算平面模型的参数。
3)对数据集中的所有点,计算各点到该平面的距离,若在阈值范围内,则将该点归为内点,否则归为外点。
4)重复步骤2)、3)M次,统计每次分类后的内点数量,选择内点数量最大时对应的平面参数为最优模型参数。
5)统计最优模型参数对应的局内点点数,当大于阈值Snum时,对所有局内点进行最小二乘拟合,得到最终的平面模型参数;否则跳出循环将数据点集上的点归为离散点。
6)从点集中剔除内点,剩下的点作为下一步处理的点集,重复步骤2)—6),直到所有的平面都被提取出。
由于点云数据量庞大,直接使用随机采样一致性算法进行平面分割效率不佳。Schnabel 采用八叉树数据结构,并结合局部采样等策略对RANSAC 算法进行改进,显著提高了点云平面分割的效率[11]。本文采用该方法进行点云平面分割,平面分割结果如图3 所示。
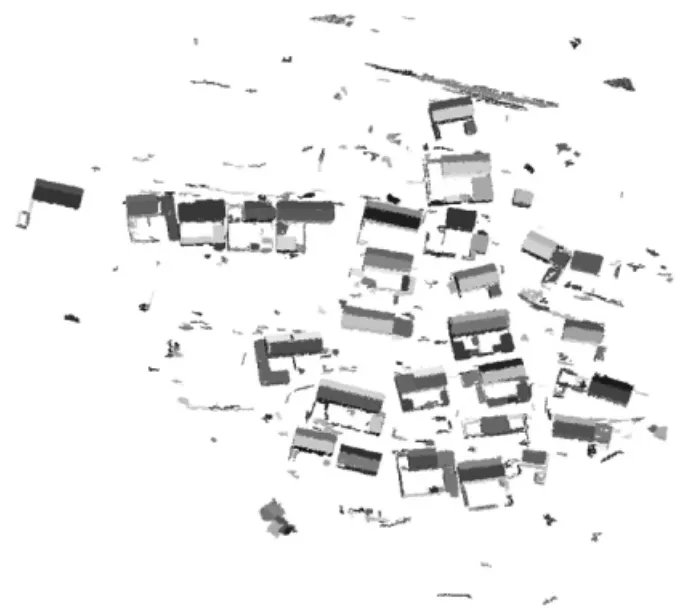
图3 点云平面分割结果
1.2.2 基于多特征组合的建筑物点云精确提取
地物点云平面分割后得到的平面片包括建筑屋顶面片、建筑立面面片、其他面片等,因此需要将建筑侧墙面片和其他面片剔除。此外,对于人字型建筑,还需要将相邻建筑平面片合并,得到完整的单个建筑点云。系统采用多种特征组合的方法实现建筑点云的精确提取,采用的特征主要包括以下几点。
1)平面法矢量:对于建筑屋顶平面矢量,包括人字型屋顶平面法矢量与竖直方向夹角通常不超过40°,而建筑立面面片的法矢量与竖直方向的夹角通常接近于90°,因此,该特征可有效区分建筑立面面片。
2)面片宽度:该特征为面片点在地面投影的外接矩形的宽度,用于识别窄状的非建筑面片。
3)面片投影面积:该特征为面片在地面投影所占的面积,用于识别面积较小的非建筑面片。
4)面片高度:该特征由建筑面片中点的高程和滤波后地面点内插高程计算得到,包括面片中点的平均高度、最高高度、最低高度,用于识别高度较低的非建筑面片。
5)面片拓扑关系:利用Alpha Shape 算法提取每个分割平面片的边界,根据边界间的距离构建面片之间的拓扑关系。对于建筑屋顶面片而言,通常有相邻的建筑屋顶平面和建筑立面,该特征可有效去除孤立的非建筑面片。此外,计算相邻面片之间的距离,当距离小于阈值时,认为该相邻面片为相同建筑物面片进行合并,得到单一建筑的点云。
根据以上平面片特征和拓扑关系,对平面片进行组合、筛选,可精确提取建筑物点云。
1.3 建筑物轮廓提取与规则化
从建筑物点云中提取建筑物外轮廓,并进行简化和规则化,得到规则化的建筑物外轮廓,可以为建筑物单体化建模等应用提供基础数据。
1.3.1 建筑物轮廓提取
在精确提取出建筑物点云后,本文采用二维Alpha Shape 算法提取建筑物的轮廓点。该方法将建筑物点云投影到水平面上,并采用一个半径为α 的圆环进行滚动,从而得到建筑物的边界离散线段,将首尾相接的线段连接成封闭的多边形[9],如图4 所示。其中,半径α控制了提取轮廓的精细程度。当α→∞时,只能得到部分外轮廓点;而当α→0 时,点集中每个点将都是轮廓点。一般情况下,参数α 设置为平均点间距的2~3倍。
1.3.2 建筑物轮廓规则化
RMBR 算法是通过一系列最小外接矩形的组合来获取建筑物轮廓规则化的算法,适用于直角类型的建筑物的轮廓规则化[10]。考虑到大多建筑物的轮廓是直角类型,本文在Alpha Shape 提取的轮廓点的基础上,采用RMBR 算法对建筑物轮廓进行规则化。基于RMBR 算法对建筑物轮廓规则化的具体步骤如下(如图5 所示,其中实线边框为建筑物初始轮廓和一次细化后的轮廓,虚线边框为第二级最小外接矩形)。
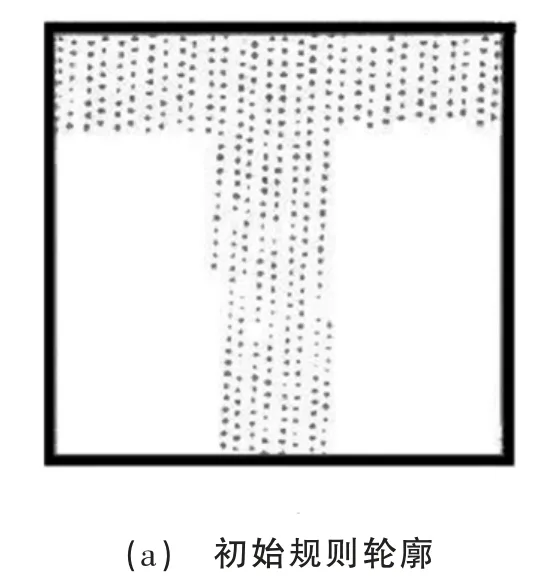
图5 RMBR 算法原理示意图
1)确定建筑物的第一层最小外接矩形MBR1。①以轮廓点中任一点为原点,将该点及与其相邻的轮廓点的连线方向为初始方向,并设为x轴方向,建立右手坐标系,统计各轮廓点在该局部坐标系中x方向和y方向上的最大小值,进而构建4 个角点分别为(xmin,ymin)、(xmax,ymin)、(xmax,ymax)和(xmin,ymax)的外接矩形;②计算各轮廓点到该矩形4 边的最近距离,若距离小于阈值(如点云平均间距),认为该点与该外接矩形一致,统计轮廓点中与该外接矩形一致的点数;③以初始方向起始方向,以一定的角度间隔(如10°)为新的x轴方向,构建一系列局部坐标系,在各个坐标系中按照同样的方法,构建外接矩形,并统计与对应外接矩形一致的轮廓点点数;④将统计的外接矩形轮廓点点数最多的外接矩形作为该建筑物的第一层最小外接矩形。
2)确定建筑物的第二层最小外接矩形MBR2。追踪与上一层最小外接矩形不一致的边界连线段,若连线段的长度超过阈值,计算各个连线段的最小外接矩形。需要注意的是,除第一层最小外接矩形外,其他层的最小外接矩形可能会有多个。
3)重复步骤2),得到其他各层的最小外接矩形MBRi,直至满足精度要求(i≤5)。
4)由递归得到的多层最小外接矩形,按照式(2)计算得到规则化后的建筑物轮廓outline。
2 实验分析
2.1 实验数据与处理
为了验证本文从倾斜影像密集匹配点云中提取建筑物方法的可行性,选取某测区的倾斜影像密集匹配点云数据进行试验。测区面积约40 000 m2,地形略有起伏,其主要地物是建筑物和植被,其中建筑物大多为人字形屋顶建筑,植被数量较多且部分与建筑物相邻接。采用六旋翼无人机搭载索尼5100 相机获取测区的倾斜摄影测量影像,通过Context Capture 软件进行空三、密集匹配等处理,其中密集匹配间隔为0.1 m,得到密集匹配点云共5 128 794 点(如图1 所示)。
对密集匹配点云进行CSF 滤波和植被点剔除等预处理后的结果如图6 所示,地面点和大部分植被点已被有效滤除,降低了点云分割等后续处理的数据量,并能提高建筑物提取的效果。

图6 去除植被后地物点云
对预处理后的点云数据进行快速平面分割,并对分割结果进行优化,得到精确的建筑物点云提取结果如图7 所示,可以看出,绝大部分建筑均被有效地识别。

图7 点云分割优化结果
对优化后的建筑物点云数据,采用Alpha Shape算法提取建筑轮廓点的结果如图8 所示,轮廓点规则化处理结果如图9 所示。可以看出,该规则化方法可以有效地表示直角类型的建筑物。
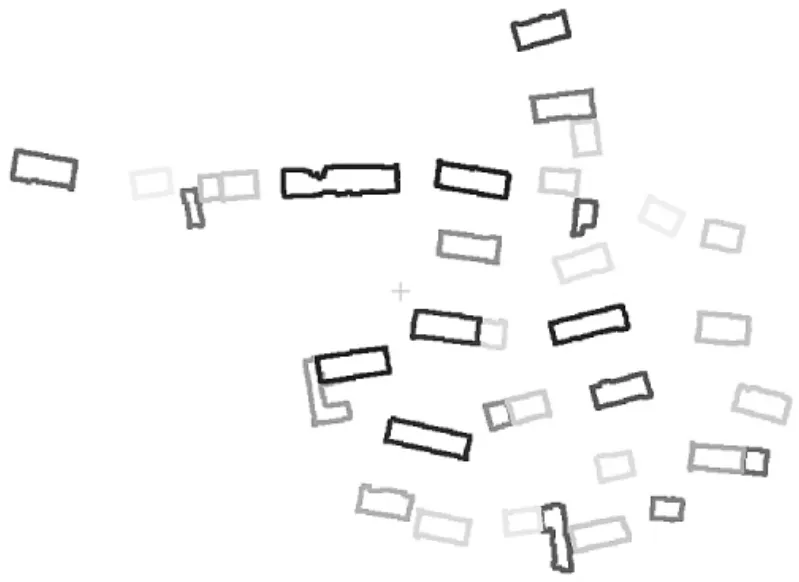
图8 优化后建筑物轮廓点
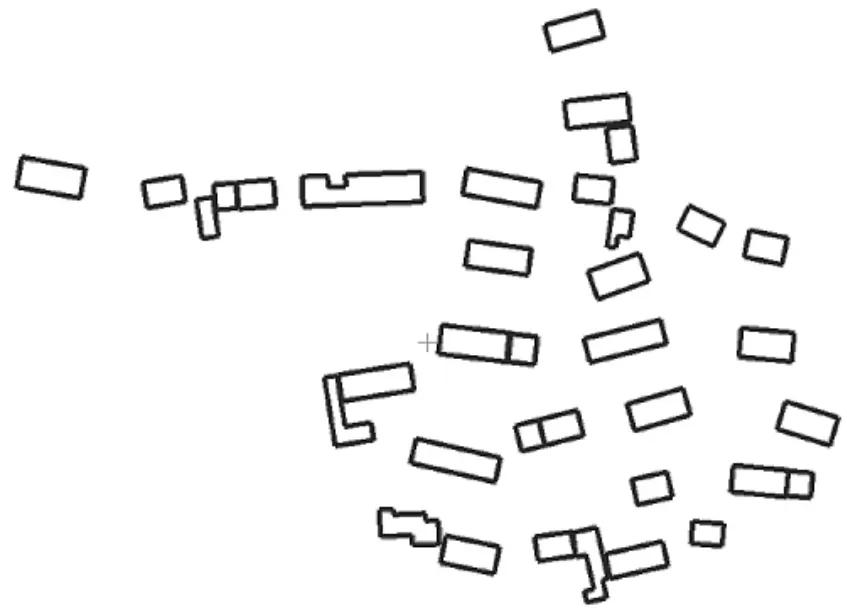
图9 规则化后的建筑物轮廓
2.2 实验结果分析
为了对建筑物提取结果进行定量评价,参考图像分类精度评估方法,采用建筑物提取结果的对象级精度进行评价,包含正确率和查全率2 个指标,正确率为正确提取的建筑物单体数与提取的建筑单体数的比值,查全率为正确提取的建筑物单体数与实际建筑物单体数的比值。其中实际建筑物单体由人工采集,当提取的建筑物单体与实际建筑单体相互重叠均超过给定阈值(如70%),认为该建筑物单体提取正确。
本文试验结果精度评价结果见表1,其中人工采集建筑物单体41 个,自动提取建筑物单体38 个,正确率为92.1%,查全率为87.8%,整体精度较好,表明本文方法适用于基于倾斜影像密集匹配点云的建筑物提取。

表1 建筑物提取精度
3 结束语
本文提出了一种基于倾斜影像密集匹配点云数据的建筑物提取方法,该方法基于大多建筑物的屋顶面由平面组成、建筑物外轮廓多为直角类型等特征出发,包含滤波、平面分割、建筑轮廓与规则化等一系列环节。实验结果表明,该方法提取的建筑物轮廓能够有效描述倾斜影像密集匹配点云中的建筑物。随着建筑物设计概念的多元化,建筑物屋顶面和轮廓形状复杂多样,后续将进一步研究适用于复杂建筑物的轮廓提取方法。
猜你喜欢
装备制造技术(2020年1期)2020-12-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
制造技术与机床(2019年11期)2019-12-04
中国煤炭工业(2019年5期)2019-11-04
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
幸福家庭(2016年3期)2016-04-05
地矿测绘(2015年3期)2015-12-22
计算机工程(2015年4期)2015-07-05
饮食科学(2014年10期)2014-10-29