
考虑司机行为的城市轨道交通列车运行速度曲线优化*
2023-11-07 10:31张程熙付敏雪郝世聪
城市轨道交通研究 2023年10期
曹 江 万 欣 张程熙 付敏雪 郝世聪
(1. 中车青岛四方机车车辆股份有限公司, 266111, 青岛;2. 北京交通大学电子信息工程学院, 100044, 北京∥第一作者, 高级工程师)
列车运行速度曲线优化是一种能够有效降低列车运行能耗的方法。文献 [1-3]给出了列车驾驶策略节能优化的数学模型,并使用PMP(庞特里亚金极大值原理)分析最优条件。文献[4]对列车节能运行优化的求解算法进行了对比分析。文献[5]采用MOPSO(多目标粒子群优化)建立了以牵引能耗、准点率及精确停车为目标的优化模型。文献[6]考虑了中间目标点的到达时间,并提出了一种改进的MOPSO。上述文献仅考虑列车运行速度曲线优化本身的数学问题,或ATO(列车自动运行)控制场景下的优化问题,对于人工驾驶场景下辅助司机完成驾驶的需求考虑不足。
即使是优秀的司机,在生理、心理和外部环境因素的影响下,也可能在驾驶过程中做出不当行为,可能会对列车运行指标产生潜在的不利影响。在铁路领域,司机的行为主要通过生理反应信号进行分析,不受运行线路或驾驶环境的限制。文献[7]通过仿真量化了警觉性、反应时间、列车超速、紧急制动和疲劳程度之间的关系。文献 [8]开发了UMD(统一司机行为)模型并在不同类别的驾驶模拟器中对其进行了验证。文献[9]利用人因技术分析了司机对列车运行安全的影响及其机理。此外,大部分文献将列车运行速度曲线作为优化列车驾驶策略的最终形式,但此种形式可能不适合司机理解和实施。结合智能方法,优化考虑司机行为的列车运行速度曲线,提高人工驾驶场景下的准点率、舒适性以及节能性,完善人机协同共驾技术,仍然是值得研究的问题。
为了进一步结合人工驾驶场景对列车运行速度曲线进行优化,提出了考虑司机行为的列车运行曲线优化方法。构建了列车运行速度曲线优化模型。对列车实际驾驶场景和司机行为习惯进行了调研,建立了列车动力学模型和考虑动态损耗的列车运行能耗模型,并确定了生成驾驶建议的原则。在此基础上,应用AG-MOPSO(自适应网格-多目标粒子群优化)算法对列车运行速度曲线进行了优化。提出了一种驾驶建议生成方法,对所提方法的优化效果和结果进行分析,并引入UMD模型构建了闭环仿真环境,以完成人在此环境下对优化效果的分析。
1 列车运行能耗模型的构建及生成驾驶建议的原则
本文构建了考虑动态损耗的列车运行能耗模型,介绍了人工驾驶特点及实际操作方法,并确定了生成驾驶建议的原则。
1.1 列车运行能耗模型的构建
列车运行能耗的精确计算是列车运行节能优化的基础。考虑牵引系统动态损耗与列车运行状态的关系,定义了列车运行能耗函数。

(1)
式中:
J——列车运行能耗;
ηa(v,F)、ηb(v,B)——表示列车传动系统在牵引工况和再生制动工况下的总效率;
F(v)、B(v)——表示列车牵引力和制动力;
v——列车运行速度;
t——时间;
tw——总运行时间。
1.2 生成驾驶建议的原则
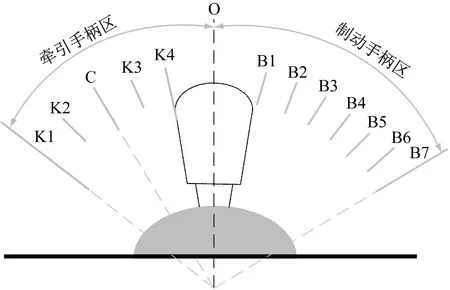
在CR400AF型动车组中,司机首先需完成行车前的所有检查和准备工作。司机通过选择合适的司控器操作挡位来调整列车状态,完成列车站间运行任务。司控器牵引手柄具备多级挡位,见图1。司控器牵引手柄中,O位左侧的挡位区包括K1—K4位和C位。K1—K4位对应的牵引级位变化速率如表1所示。列车牵引力总共有0~8级,且级位可以实现连续变化。
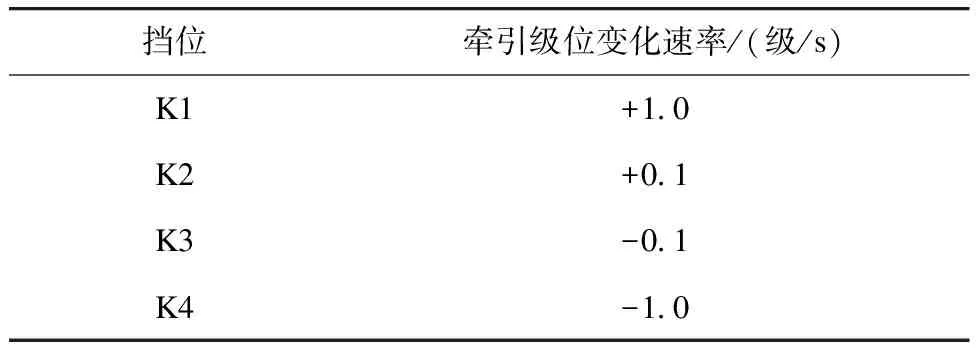
表1 司控器牵引手柄牵引级位变化速率
注:B1—B7为制动手柄区挡位。
结合司机操作手册及优秀司机经验,制定以下驾驶建议需遵循的原则:① 通过将司控器牵引手柄置于K1或K2位并逐渐平稳加速,以确保乘客舒适性;② 列车运行中,牵引手柄无须逐级提升或降低,可根据加、减速需要自由控制;③ 通常情况下,增加或减少制动力时,应逐级切换制动手柄;④ 在实施常用制动时,应避免频繁操作制动手柄,保持列车均匀减速;⑤ 除限速路段和过分相路段外,司机调整手柄的间隔通常约为3 min。驾驶建议不应频繁变化,以避免增加司机的工作负荷。
2 列车运行速度曲线优化方法
以列车准点为基础研究了一种满足司机操作行为要求的列车运行速度曲线优化方法,建立了列车运行时间、列车运行能耗和司机操作手柄挡位切换频率的多目标优化模型。采用AG-MOPSO算法优化列车运行速度曲线。
2.1 列车运行曲线优化模型
本文使用经典的单质点模型列车运行,并构建了列车动力学模型[3]。列车运行速度曲线优化的目标是获得满足多个指标的目标速度曲线。引入帕累托原理来确定最优解。定义列车运行多目标优化的目标函数如下:
minZ=(f1,f2,f3)
(2)
f1=J
(3)
(4)
(5)
(6)
式中:
Z——目标函数;
f1——列车运行能耗,见式(1);
f2——列车运行时间与计划运行时间的差值;
f3——司机手柄挡位切换时间评估值;
ttarget——计划运行时间;
th,i、tdrive——当前手柄的持续时间和基于优秀司机经验确定的手柄位置切换周期(i为列车运行阶段),取3 min;
ti、vi、si和Δai——离散过程中列车的运行时间、速度、位置和加速度增量;
a、s——最大加速度和线路运行终点;
vmax——列车最高运行速度,由线路限速、列车允许速度、防护速度等共同确定;
ui——控制变量,ui∈{K1, K2, K3, K4, C, O, B1, B2, B3, B4, B5, B6, B7};
Ω——可行域。
列车运行速度曲线目标函数的约束条件包括列车运行速度约束、列车运行位置约束和舒适度约束。
2.2 AG-MOPSO算法
本文采用AG-MOPSO算法来解决考虑司机行为的列车运行多目标优化问题,基本步骤如下:
步骤1 初始化种群。将列车最优运行工况作为启发设置,并选择符合约束条件的粒子种群。
步骤2 计算每个粒子的目标函数值,得到非劣解集、种群最优解gbest和个体最优解xbest。为改善算法的探索性,设置1个网格来划分非劣解集,被选中的概率与其目标函数值的适应度呈正相关。
(7)
式中:
dj、dn——第j个网格和第n个网格中的粒子数;
gd,j——被选中的概率;
Nk——网格总数,k为选代次数。
步骤3 将上述结果添加到外部存储器中。
步骤4 计算惯性权重,并更新粒子的速度和位置。
vm,k+1=wvm,k+c1r1(xbest,k-xi,k)+c2r2(gbest,k-xm,k)
(8)
xm,k+1=xm,k+vm,k+1
(9)
式中:
vm,k、xm,k——第m个粒子在第k次迭代中的速度与距离;
w——惯性权重;
c1、c2——加速因子;
r1、r2——[0,1]区间中的随机数。
步骤5 确定每个粒子是否满足约束条件。如不满足,则重复步骤4,直至满足。同时增加全局突变率,防止陷入局部循环。
步骤6 计算每个粒子的目标函数值,并更新个体最优解xbest。
步骤7 更新非劣解集、种群最优解和外部存储器。当非劣解的数量超过网格存储限制,则从每个网格中随机删除指定数量的非劣解。
xd,j=round((Nkdj-Nlim)/Nk)
(10)
式中:
xd,j——第j个网格的删除编号;
Nlim——非劣解集合数量的上限;
round(·)——四舍五入的基本函数。
步骤8 判断是否满足终止条件。如果满足,则算法停止运行;否则,返回步骤4。
经过上述步骤,通过AG-MOPSO算法输出非劣解集合。
2.3 生成驾驶建议的方法
根据1.2节提出的生成驾驶建议的原则,结合列车运行时间和运行能耗,确定列车运行速度曲线优化结果,并输出司控器手柄序列。使用模糊隶属函数计算每个子目标函数的隶属度值。模糊隶属函数Uf如下:
Uf=(fi-fmin)/(fmax-fmin)
(11)
式中:
Uf、fi、fmax、fmin——子目标函数的隶属度值、适应度、最大值和最小值。
基于选择的解决方案,获得适用于人工驾驶场景的列车节能运行速度曲线。
3 案例分析
考虑司机行为的列车运行速度曲线优化体系见图2。
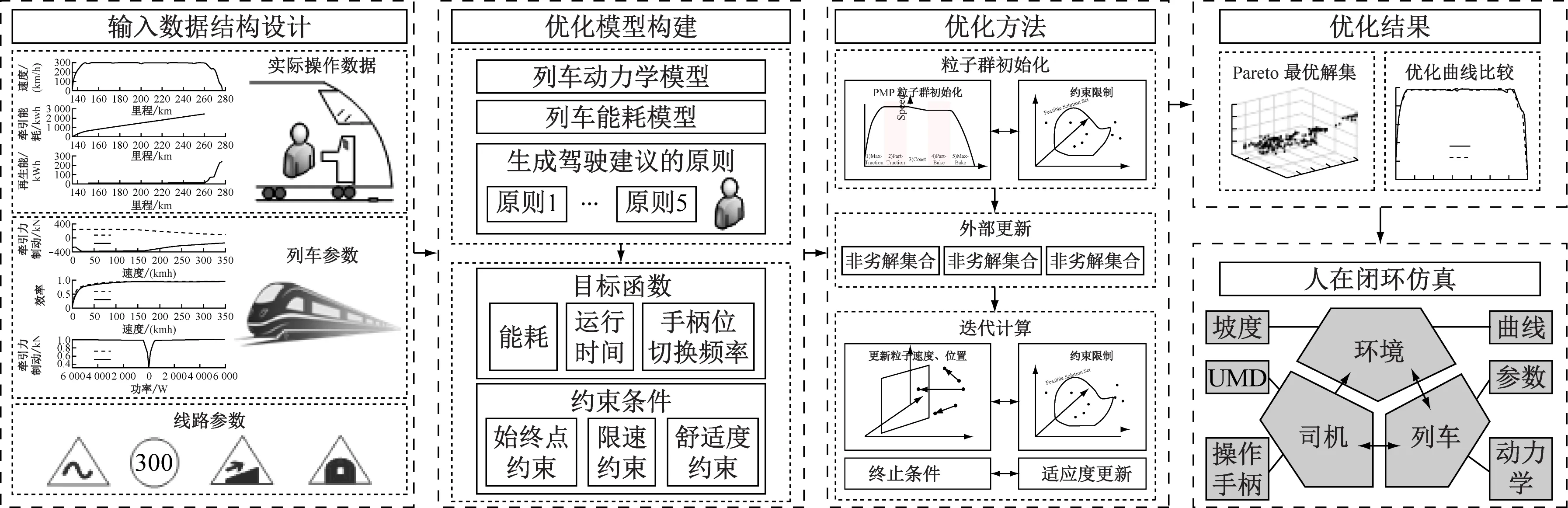
图2 考虑司机行为的列车运行速度曲线优化体系架构
3.1 优化结果对比分析
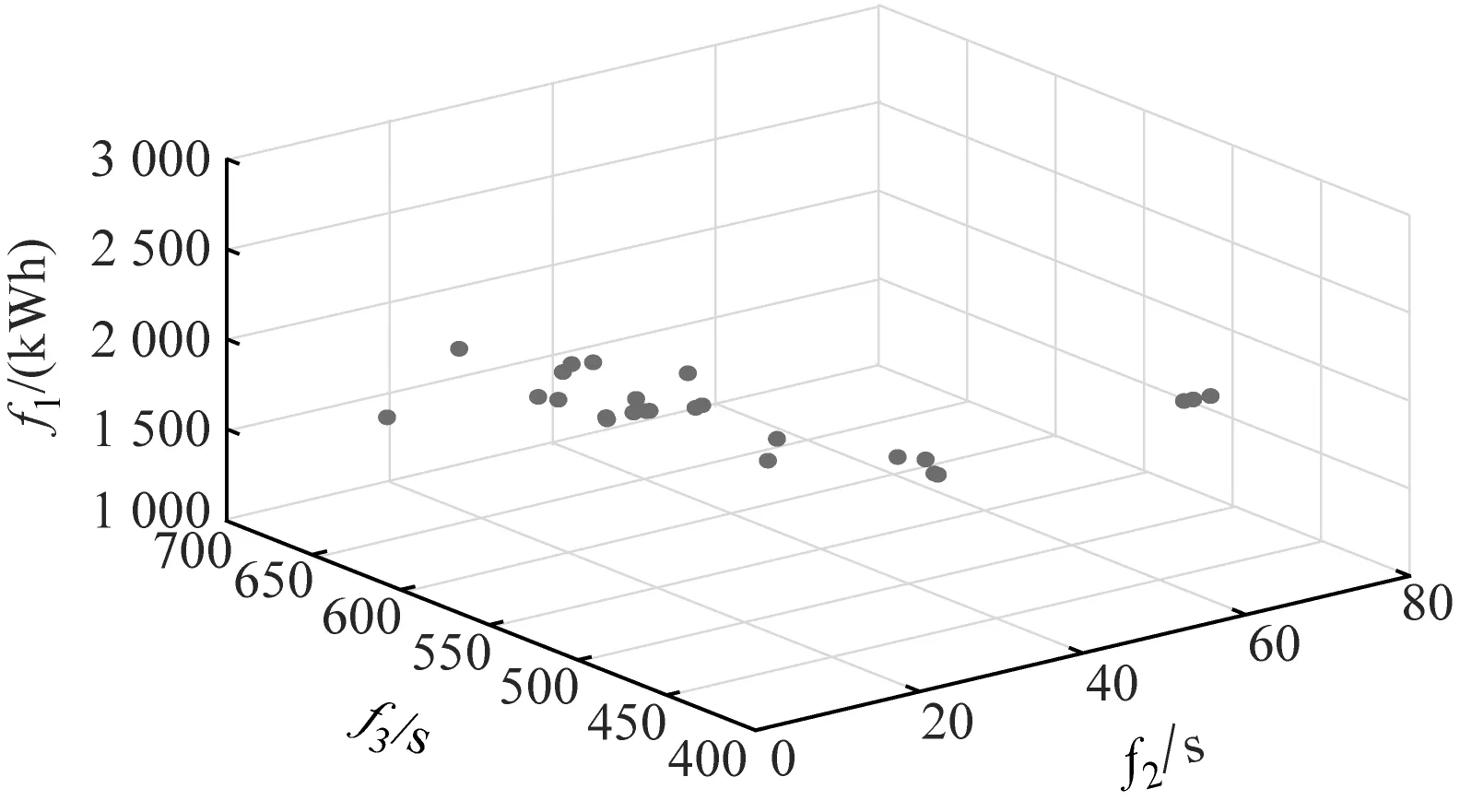
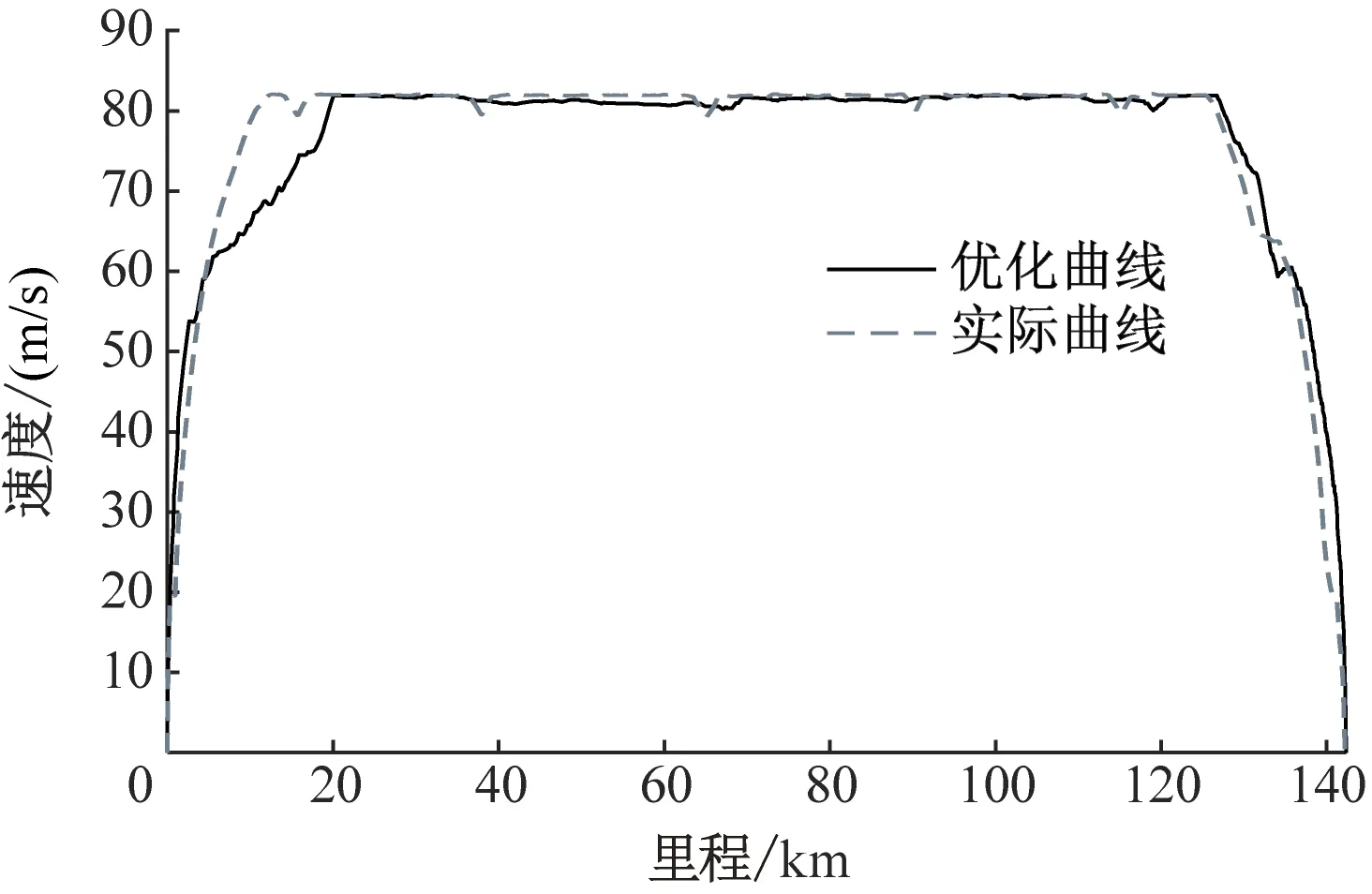
本文使用CR400AF型动车组对京广铁路保定东站—石家庄站的实际线路数据进行了仿真计算。设置AG-MOPSO算法参数(见表2),设置不同初始化方法对列车节能运行进行仿真优化。图3展示了不同初始化方法对应的帕累托最优解集。图4为不同初始化方法下的列车运行速度曲线。
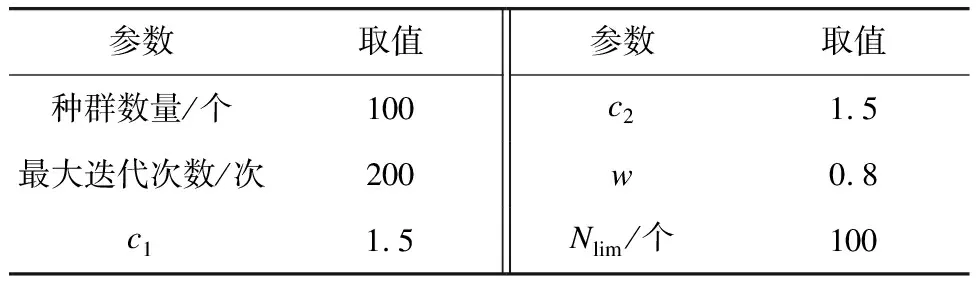
表2 AG-MOPSO算法参数取值
a) 随机初始化
a) 随机初始化
表3对比了经不同初始化后的优化指标。由表3可见: 通过AG-MOPSO算法生成的列车运行速度曲线具有更低的能耗;随机初始化后的粒子满足约束条件的pareto最优解较少,且求解时间较长;经过随机初始化和启发设置初始化后,列车运行能耗分别降低了9.22%和20.33%;与列车运行时间的原始数据2 072 s相比,经过随机初始化和启发设置初始化后的列车运行时间分别减少了16 s和76 s,所提方法确保了列车运行的准点率。此外,该算法生成的操作手柄序列的切换频率较低,符合司机的行为习惯,可有效应用于人工驾驶场景中的列车节能驾驶。

表3 不同初始化方法下优化指标对比
3.2 人在闭环仿真分析
UMD模型旨在简化表示司机-车辆-环境交互。本文采用文献[8]提出的UMD模型构建人在闭环仿真环境,并验证了列车运行速度曲线的优化结果。需注意,该模型仅用于列车运行状态快速变化的阶段,如列车起动的早期阶段,以及列车从制动到停车的后期阶段。UMD模型定义了5个参数:ATT(司机的感性水平)、EXP(司机危险感知能力)、DS(司机午餐后的疲劳程度)、TD(次要任务的主观工作量)和CULT(司机的文化程度)。上述参数捕捉了影响司机行为的各种具体因素,且其取值与不同类型的司机和背景条件相关。描述司机行为的基本参数取值见表4。有关UMD模型及其参数的更详细讨论,参考文献[10]。

表4 描述司机行为的基本参数取值
描述司机行为Fi的通用表达式为:
Fi=αC1(ATT,EXP)+γC2(DS)+βC3(TD)
(12)
其中:
式中:
C1、C2、C3——与司机特性相关的函数;
α、γ和β——与试验无关的标准值。
在列车运行场景中,司机参数被设定为感性、经验丰富、警觉和低任务需求。图5展示了由UMD模型仿真得到的列车运行速度差、加速度差随里程变化曲线。在人在闭环仿真中,J为1 824.58 kWh,列车运行时间为2 049 s,满足准时和节能的目标。该方法已应用于中车青岛四方机车车辆股份有限公司的测试环线上,测试环线总长度为3.69 km,呈环形分布在厂房周围。测试环线鸟瞰图如图6所示。
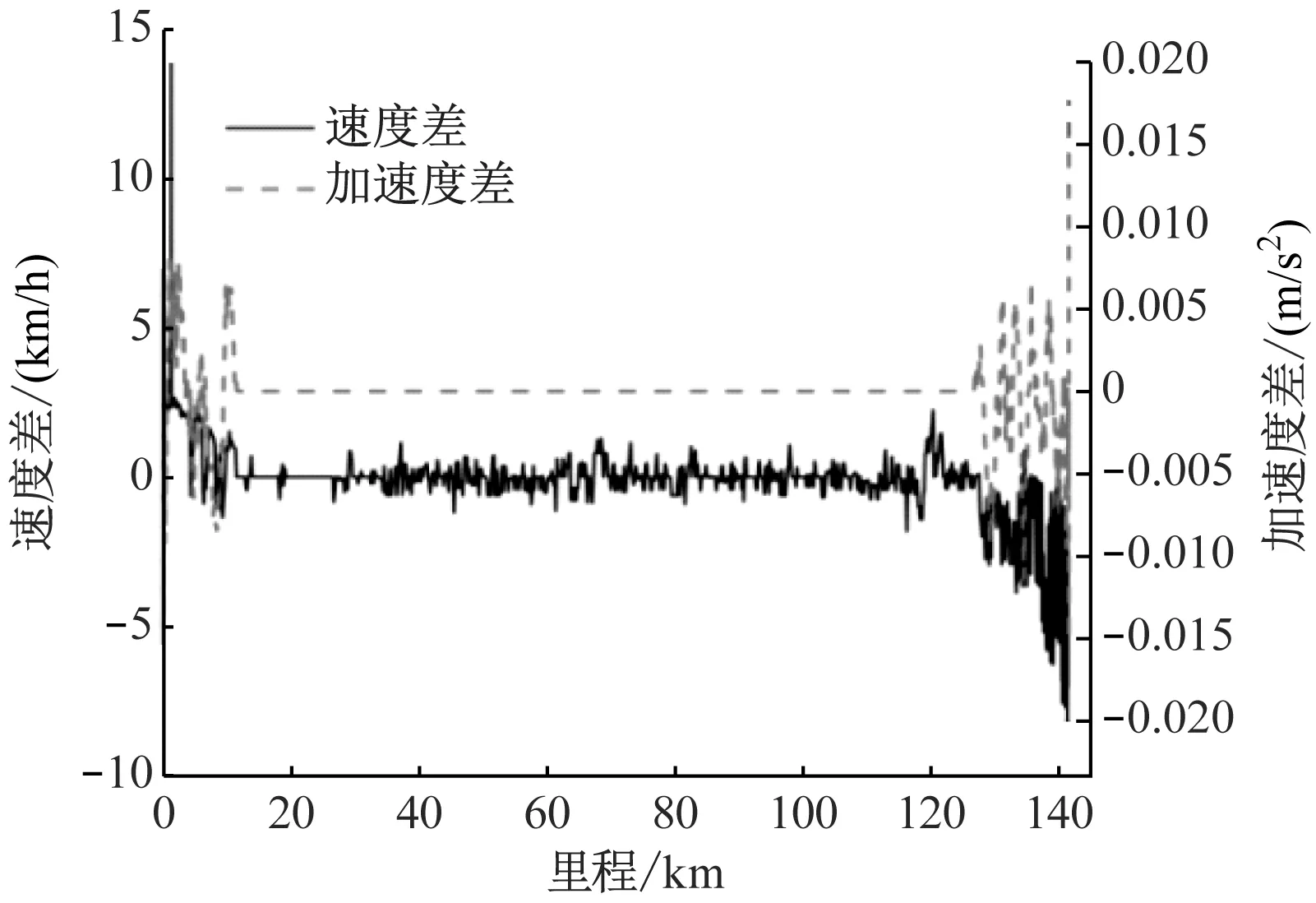
图5 列车运行速度差、加速度差随里程变化曲线

图6 测试环线鸟瞰图
4 结语
本文提出了一种考虑司机行为的列车运行速度曲线优化方法。基于CR400AF型动车组的实际人工驾驶场景以及驾驶建议的生成原则,构建了列车运行速度曲线优化模型,将列车运行最优运行工况用作启发设置,采用AG-MOPSO算法对京广铁路保定东站—石家庄站的实际线路数据进行了仿真计算。引入UMD模型,对司机-车辆-环境交互进行了人在闭环仿真优化分析,并在中国中车股份有限公司的测试环线上进行了联调测试。所提方法有助于完善人机协同共驾技术,提升轨道交通智能化水平。
猜你喜欢
装备制造技术(2020年11期)2021-01-26
文萃报·周二版(2021年51期)2021-01-02
铁道通信信号(2020年1期)2020-09-21
杂文月刊(2019年19期)2019-12-04
小天使·一年级语数英综合(2019年11期)2019-01-13
电子制作(2018年11期)2018-08-04
铁道通信信号(2016年8期)2016-06-01
中国铁道科学(2015年6期)2015-06-21
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
