
掘进机横摆控制问题分析
2023-11-30 04:45樊文超
机械管理开发 2023年10期
樊文超
(北辛窑煤业有限公司,山西 宁武 036000)
0 引言
掘进机为煤矿生产必不可少的生产设备,其承担着对巷道的掘进任务;而且,掘进机是一套集机械、电气、液压控制为一体的刚柔耦合系统。目前,我国掘进机虽然在截割功率和吨位上达到了世界先进水平,但是整机生产的可靠性仍与国外存在较大的差距,比如掘进机截齿磨损、回转台铰接耳断裂、行走轮磨损严重等。本文主要针对掘进机横摆机构在实际生产中所面临的可靠性低的问题,采用虚拟样机分析手段对其在不同工况下的工作状态和控制策略进行研究[1-3]。
1 掘进机横摆控制系统模型的建立
本文将掘进机横摆机构作为主要研究对象,建立横摆机构的实体模型和液压机构模型。
1.1 掘进机横摆机构液压模型的构建
本文所研究掘进机的具体型号为EBZ300,该型掘进机的具体性能参数如表1 所示。

表1 EBZ300 掘进机主要性能参数
本文将基于表1 所示的掘进机的主要性能参数完成模型的搭建,并对其横摆机构的相关问题展开研究。在实际生产中,掘进机横摆机构将液压油缸中的液压压力转化为机械动力。因此,结合掘进机的实际生产掘进机横摆机构的工况特点,主要对横摆机构的液压系统进行模型,建模所采用的软件为EASY5。基于EASY5 软件所构建的掘进机横摆机构的液压系统模型如图1 所示。
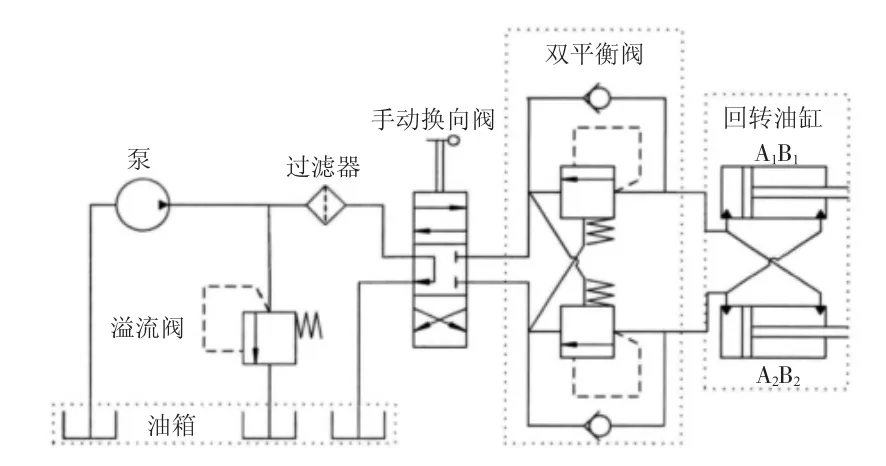
图1 掘进机横摆机构液压系统原理
如图1 所示,掘进机横摆机构在实际生产中直接作用对象为通过对油缸推理力臂、油缸伸缩长度以及油缸伸缩速度等指标的控制实现对了整个机构的控制。
1.2 掘进机横摆机构实体模型的构建
掘进机横摆机构主要包括截割头、本体架、齿轮、花键、回转台和内伸缩套等零部件。其中,截割头主要由截齿、叶片、齿座和头体等组成;针对截割头实体建模的需求,本文将采用参数化建模的方式实现其功能。在实际工作中,掘进机横摆机构的本体架无相互间的作用,为了减少仿真过程的计算量和计算时间,采用拉伸命令构建本体架的基本结构,而后在通过旋转、打孔以及抽壳等操作完成本体架模型的构建。
基于Pro/E 三位建模软件构建掘进机横摆机构的模型,并将模型导入ADAMS 软件中;根据掘进机横摆机构的实际材料属性对模型中各零部件的材料属性进行设置;根据各零部件之间的相互作用关系完成约束关系的设置。
在上述步骤下建立了掘进机横摆机构的刚性模型。但是,为了能够准确反应掘进机在实际工作中所承受的载荷情况,并得出掘进机横摆机构在恶劣工况下的薄弱环节,需要对上述所构建的刚性模型进行柔化处理,即得到了刚柔耦合模型;具体操作:对掘进机横摆机构中的回转台赋予特殊的特性材料参数。
最终,所构建的掘进机横摆机构刚柔耦合仿真模型如图2 所示。
图2 掘进机横摆机构刚柔耦合仿真模型
2 掘进机横摆机构刚柔耦合仿真结果分析
将“1”中所构建的掘进机横摆机构控制系统和掘进机横摆机构刚柔耦合仿真模型有机结合后得到了掘进机横摆机构机液耦合仿真模型,对掘进机在不同工况条件下(不同阀口开度与不同煤岩层坚固系数的组合)掘进机回转台质心位置变化、悬臂摆动角度与截割头合力及力矩;悬臂摆动的角速度、角度变化等情况进行对比分析。仿真分析的工况参数如表2 所示。
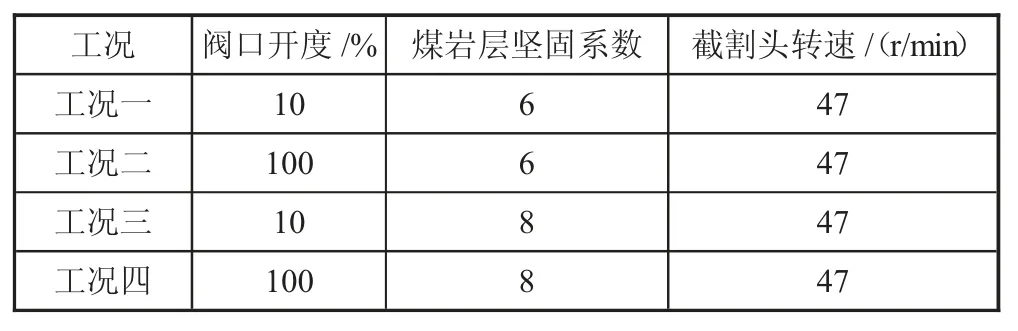
表2 仿真工况参数
通过对上述不同工况下仿真结果进行分析,得出回转台为掘进机横摆机构的薄弱环节。在四种工况下且时刻点0.01 s 对应横摆机构的最大应力位置处于回转台与其左侧回转油缸的铰接耳部位置,不同工况下的应力值如表3 所示。

表3 不同工况对应掘进机横摆机构应力值 单位:MPa
根据其材料属性,掘进机横摆机构回转台材料的许用应力为108 MPa。对比表3 中的数据,掘进机的最大应力值均远大于其许用应力值;而且随着阀口开度的增加和煤岩层坚固系数的增加,其所承受的最大应力值均在增加。同时,掘进机横摆机构在稳定运行时,工况二、工况三回转台所承受的应力值与其许用应力值相近,而在工况四时回转台应力值大于其许用应力值。
综上,当掘进机横摆机构在全速运行时,当前结构无法适应坚固系数为8 的煤岩层的工作。
3 掘进机横摆机构的控制优化
鉴于掘进机横摆机构属于一个非线性且多变量强耦合的工作过程中,实践中表明仅采用简单的PID控制器难以达到与其的控制效果;而且鉴于掘进机工作环境的恶劣性,容易受到周围环境的影响,要求其控制系统具有较强的鲁棒性和抗干扰特性。因此,本文拟提出采用SVR 内模控制系统取代其传统PID 控制系统。基于“1”中所构建的掘进机横摆机构刚柔耦合机液仿真模型对比PID 控制器和SVR 内模控制的效果,对比结果如表4 所示。
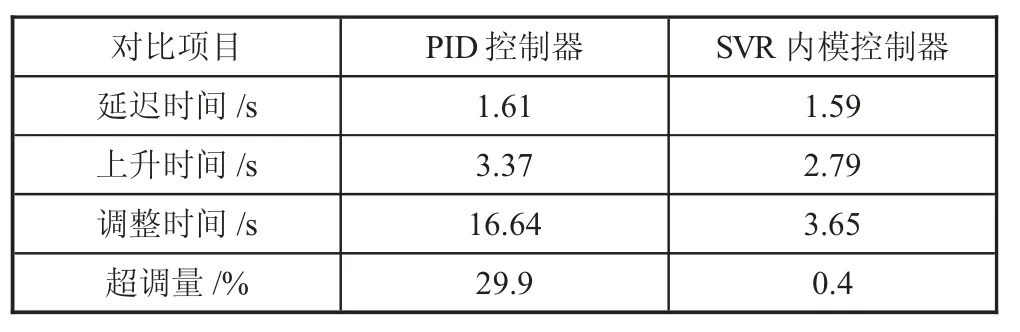
表4 PID 控制器和SVR 内模控制器的效果对比
如表4 所示,采用SVR 内模控制器相比于PID控制器具有全优的控制效果。具体分析如下:在延迟时间和上升时间方面两类控制器相差不大;而在调整时间和超调量方面,SVR 内模控制器具有明显的优势。即基于SVR 内模控制器的掘进机横摆机构具有较快的响应速度;同时,非常小的超调量对应的实际生产中巷道的超挖量较小。
4 结论
掘进机为煤矿生产中必不可少的设备,其主要用于对巷道的开拓,巷道开拓的效率和最终巷道的成型质量对于保障后续的高效生产具有重要意义。本文采用虚拟样机确定掘进机生产的薄弱环节,并对横摆机构的控制策略进行优化[4-5]。具体总结如下:
1)当掘进机横摆机构在全速运行时,无法适应坚固系数为8 的煤岩层的工作,且薄弱环节为回转台。
2)基于SVR 内模控制器的掘进机横摆机构具有较快的响应速度;同时,非常小的超调量对应的实际生产中巷道的超挖量较小。说明,基于SVR 内模控制器可获得快速掘进和高质量的巷道。
猜你喜欢
周口师范学院学报(2022年2期)2022-06-23
机械管理开发(2021年12期)2022-01-27
机械管理开发(2020年1期)2020-03-14
测控技术(2018年8期)2018-11-25
四川电力技术(2015年5期)2015-12-19
凿岩机械气动工具(2015年3期)2015-11-11
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年21期)2015-04-09
冶金设备(2014年1期)2014-11-06
