电磁直线电机悬架馈能减震设计及参数优化
2023-11-30 03:05杨慧荣
防爆电机 2023年6期
杨慧荣
(河南工业贸易职业学院汽车工程学院,河南郑州 451191)
0 引言
传统结构的悬架系统通常是以热能耗散的形式实施减振的效果,这种方式对减振器控制性能与寿命都存在不利影响[1、2]。这在一定程度上促进了许多学者对馈能型悬架开展研发工作,这种结构可以把振动能转变成电能的形式实现回收利用,显著减缓汽车能耗[3]。
现阶段,已有许多国内外学者对馈能潜力与具备能量回收功能的馈能型悬架开展了深入探讨。其中,张晗[4]设计了一种通过液电馈能方式建立的半主动悬架并对其进行了台架测试,结果显示设定控制电流等于30A的条件下可以获得13.1%的能量回收率,表明馈能悬架能量回收满足可行性条件。文献[5]开发了一种可以实现分级变压充电的馈能悬架,可以实现半自动控制的效果。许广灿[6]则通过滚珠丝杠式悬架回收振动能量并取得了较高的回收率。虽然近些年来已有较多研究人员针对悬架能量回收领域开展了大量研究工作,但大部分是从定性层面开展分析,尚未建立定量数学模型,而且也没有确定明确的能量回收程度,无法达到理想的能量回收效果[7、8]。
本文根据以上研究结果,为电磁直线电机悬架结构构建了1/4悬架动模型,之后对其开展了馈能实验。以Matlab/Simulink软件建立了悬架馈能潜力的数学模型,再对其开展回收性能计算,验证了能量回收电路可靠性与升降压效果,为振动能量回收率的优化提供了参考价值。
1 电磁直线电机悬架设计
电磁直线电机悬架的组成结构包括电磁直线电机作动器、弹簧部件、阻尼减振器、电容器、馈能电路模块、加速度传感器等部分,具体见图1[9]。
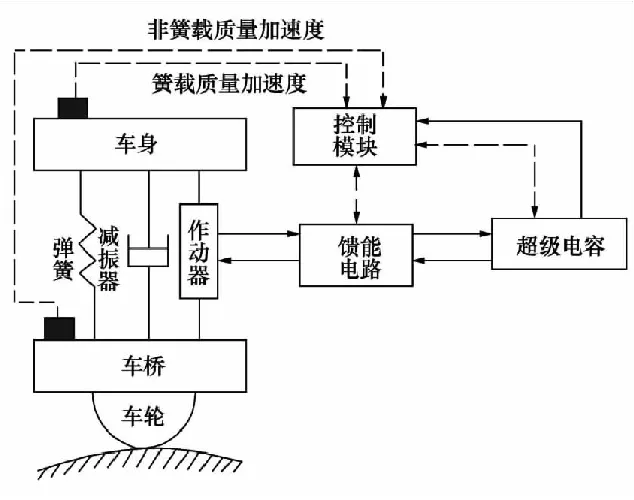
图1 电磁直线电机馈能减震悬架结构图
在实际运行过程中,电磁直线电机可以设置馈能与主动两种工作模式[10]。其中,车辆处于较差路面上时,不能保持良好的平顺性,此时电磁直线电机保持主动模式,超级电容对直线电磁直线电机进行供电,可以通过调节馈能电路电流来达到控制电磁直线电机输出推力的效果,从而提升车辆平顺效果与操纵稳定性,确保悬架达到主动调控的性能。
2 电磁直线电机悬架动力学建模
2.1 随机路面模型
为保证路面位移模拟信息与道路工况更接近,按照滤波白噪声的方式构建路面模型,再将均值等于零的高斯白噪声利用低通滤波器处理后得到包含路面不平度的位移数据,同时设置了下截止频率。以下给出了路面速度计算式
式中,q(t)—路面位移;f0—下截止频率;Gq(n0)—路面不平度系数;n0—空间频率;u—车速;wt—高斯白噪声。
2.3 电磁直线电机馈能模型
处于馈能模式下时,当悬架发生振动时会导致电磁直线电机初级与次级发生相对运动,从而对磁感线造成切割,由此形成感应电动势与电流,将电磁直线电机看成理想电磁直线电机时,建立电压和电磁阻尼力关系式如下
式中,Ul—电压;il—电流;ki—推力系数;ke—直线电磁直线电机的反电动势系数;r—直线电磁直线电机的内阻;R—馈能电阻;Fg—电磁阻尼力。
进行组合后得到以下表达式
计算悬架振动状态下的直线电磁直线电机能量Wl
3 悬架参数优化
以30km/h车速行驶于B级路面上时,控制悬架参数按照20%N梯度选择7个值开展仿真测试,得到图2的结果,各项测试结果列于表2中。
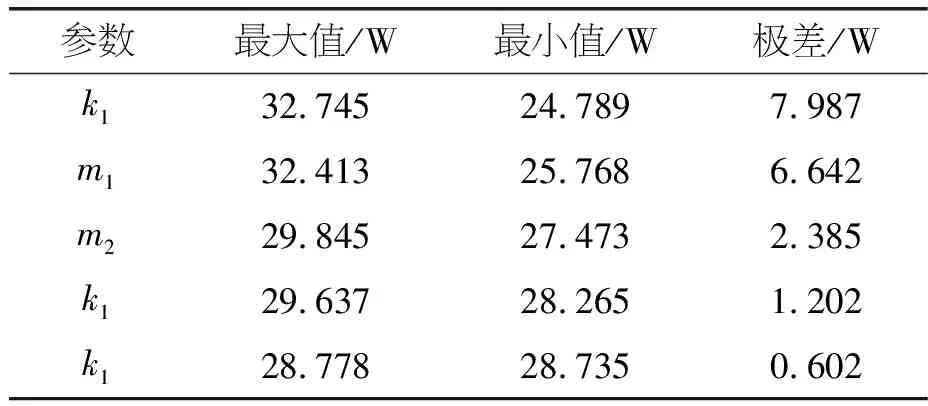
表2 悬架馈能功率均方根值

图2 馈能功率随悬架参数变化
根据图2可知,当轮胎刚度与非簧载质量提高后,馈能功率均方根也呈现线性增长的现象,而阻尼系数提高时则发生了线性降低的趋势。当簧载质量和悬架刚度介于0.4~1.0N范围内,馈能功率均方根都表现为线性增大的规律,后悬架刚度引起的馈能功率均方根则发生了降低。
从表2中可以看到仿真得到的馈能功率均方根值极差,其中,轮胎刚度与非簧载质量属于馈能潜力的最重要影响因素,而且轮胎刚度相对非簧载质量引起的馈能潜力变化程度更明显。其余各项参数对馈能功率均方根只产生了较小的作用,几乎不会引起馈能潜力的变化。
图3与图4给出了轮胎刚度和非簧载质量引起的系统动力学变化结果。通过图3与图4结果可知,增大轮胎刚度和非簧载质量时,获得了更大的车身加速度与轮胎相对动载,这对车辆乘坐舒适度以及操纵过程都存在不利影响。
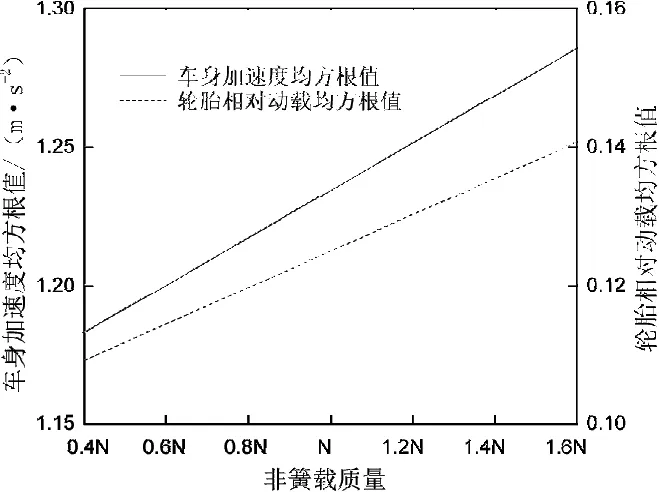
图3 轮胎刚度对动力学性能影响
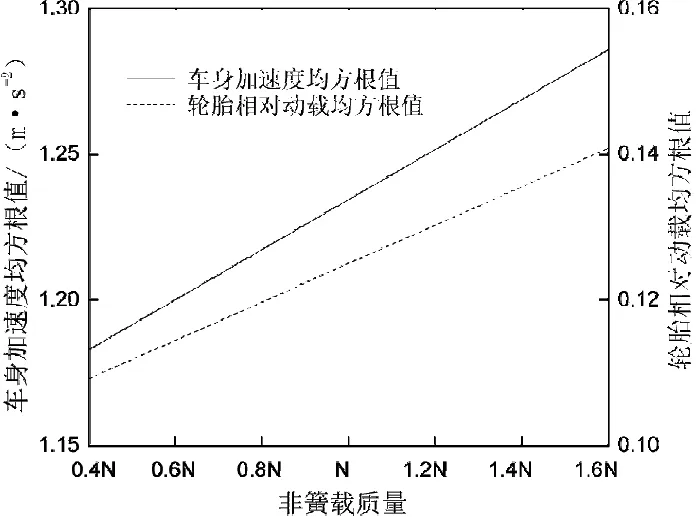
图4 非簧载质量对动力学性能影响
4 结语
本文开展汽车电磁直线电机馈能减震悬架设计及参数优化,得到如下有益结果:(1)当轮胎刚度与非簧载质量提高后,馈能功率均方根也呈现线性增长,悬架刚度引起的馈能功率均方根则发生了降低。(2)增大轮胎刚度和非簧载质量时,获得了更大的车身加速度与轮胎相对动载,这对车辆乘坐舒适度以及操纵过程都存在不利影响。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21
中国生物医学工程学报(2019年4期)2019-07-16
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
自动化学报(2017年2期)2017-04-04
北京汽车(2016年6期)2016-10-13
中学生数理化·七年级数学人教版(2016年2期)2016-05-30
现代制造技术与装备(2015年4期)2015-12-23
新高考·高二数学(2014年7期)2014-09-18
汽车维护与修理(2014年10期)2014-02-28
机械与电子(2014年2期)2014-02-28