
基于VMD 和AVOA-SCN 的齿轮箱故障诊断*
2023-12-11 13:03范亚飞郝如江杨青松邓飞跃
制造技术与机床 2023年12期
范亚飞 郝如江 杨青松 邓飞跃
(①石家庄铁道大学省部共建交通工程结构力学行为与系统安全国家重点实验室,河北 石家庄 050043;②石家庄铁道大学机械工程学院,河北 石家庄 050043;③河北省工程机械动力与传动控制重点实验室,河北 石家庄 050025)
齿轮箱作为机械装备基础性部件之一,也是容易出现故障的区域,齿轮箱故障通常复杂多样,若出现故障则会对机械装备的运行造成严重的影响。因此,齿轮箱状态的正确监测与诊断对于保障机械设备的正常运行至关重要。
由于齿轮箱工作环境的复杂性,其故障振动信号易受到周围环境及设备的噪声干扰,导致其故障频率难以提取和识别。为应对这种状况,Huang N E[1]等提出了经验模态分解(empirical mode decomposition,EMD)的方法。然而由于EMD 分解过程中存在端点效应、模态混叠等问题,严重影响了故障特征提取的正确性。为了进一步优化筛选条件并提高分解精度,局部均值分解(local mean decomposition,LMD)、集成经验模态分解算法(ensemble empirical mode decomposition,EEMD)总体平均经验模态分解方法(complementary ensemble empirical mode decomposition,CEEMD)等方法被提出并取得了良好的效果[2-4]。但是这些方法还是未能避免递归分解框架引发的模态混叠和端点效应问题,为了解决上述问题,Dragomiretskiy K[5]等提出了变分模态分解(variational mode decomposition,VMD)的方法。VMD 是一种自适应的非递归的信号分解方法,很大程度上解决了传统递归模式分解产生的模态混叠和端点效应问题。
近年来,由于神经网络的快速发展,许多研究人员开始将神经网络算法与故障诊断的实际应用相结合。赵小强等[6]采用不同尺度的卷积层提取输入数据特征并引入通道注意力机制改进卷积神经网络,相比于传统卷积神经网络结构具有更好的泛化性。余浩帅等[7]提出了少样本下混合自注意力原型网络的故障诊断方法,将位置自注意力机制和通道自注意力机制融合构建混合自注意力模块来获取更具判别性的特征信息。但由于基于神经网络的齿轮箱故障诊断方法,多以误差反向传播算法进行参数优化,需要大量的超参数、存在梯度爆炸和梯度消失的问题且需要大量的时间成本训练模型[8-9]。而在机器学习中,随机算法常被用来发展计算代价小且效率高的模型优化器,因此,基于随机化算法的神经网络模型受到广泛关注。
1997 年,Li J Y 等[10]提出了随机向量函数连接神经网络(random vector functional link network,RVFL),由于RVFL 参数随机选取的不确定性和RVFL 随机参数选取并不能保证算法具有普遍的逼近性质。因此,Wang D H 等[11]提出了一种随机配置网络模型(stochastic configuration networks,SCN)。而SCN 因其快速的建模效率和通用的逼近性能已经被应用于工业过程建模[12]、计算机视觉[13]、医学数据分析[14]等领域,因其在解决回归和分类问题上具有良好的性能,这也为故障诊断提供了新的解决方案。SCN 是在严格的监督机制下,根据输入数据逐步获得其权重和偏置来建立的。SCN 的性能对其参数很敏感,对于任何的SCN 模型,权值和偏置的参数都是在r和 λ给定的范围内随机初始化,然后根据监督条件选取合适的节点添加到网络中去,而权重与偏置的随机初始化的不确定性会导致网络预测结果的不稳定,而元启发式算法已被广泛用于参数寻优。因此,为了解决SCN 网络权重和偏置随机初始化会导致网络预测结果的不稳定性问题,提出了一种用非洲秃鹫优化算法[15](African vultures optimization algorithm,AVOA)优化随机配置网络节点选取方式的方法,以提高故障分类的准确性和稳定性。
综上所述,对于齿轮箱故障诊断中的特征提取困难和分类准确性问题,本文提出了一种基于变分模态分解和非洲秃鹫优化算法优化随机配置网络的齿轮箱故障诊断方法:首先将对原始信号进行变分模态分解获取其本征模态分量,再用相关系数筛选本征模态分量并计算其样本熵,作为特征向量,输入到用非洲秃鹫优化算法优化后的随机配置网络中进行分类识别。通过搭建实验平台,采集数据来验证所提方法的有效性。
1 基础理论
1.1 变分模态分解
变分模态分解是一种自适应的、非递归的信号分解方法。经VMD 分解后的模态函数可表示为
式中:uk(t)满足Ak(t) φk(t),为瞬时振幅,为瞬时相位。VMD 的分解过程就是变分问题的求解过程,求解过程如下。
(1)对uk(t)进行希尔伯特变换,得到解析信号,计算其单边谱,并与算子e-jωkt相乘,将uk(t)的中心带调制到相应基带。
(2)计算解调梯度的平方范数L2,并估计每个模态分量的带宽。
式中:uk={u1,u2,···,uk} 代表一组IMF 分量,ωk={ω1,ω2,···,ωk}代表中心频率集。通过引入拉格朗日函数,将上述有约束的变分问题转变成无约束变分问题的求解,如公式(4)所示。
(3)用交替方向乘子法更新各分量及其中心频率,最终得到的解就是原问题的最佳解,如公式(5)所示。
1.2 非洲秃鹫优化算法
AVOA 是受非洲秃鹫觅食和导航行为启发所提出的一种元启发式算法,AVOA 算法流程如下。
(1)确定最佳秃鹫位置。初始种群形成后,计算种群适应度选取最优与次最优秃鹫位置,其他秃鹫使用如下公式向最优与次最优移动:
(2)秃鹫饥饿率。受秃鹫吃饱或饥饿速度的启发,秃鹫从探索阶段转移到开发阶段。饱腹率呈下降趋势,公式如下:
式中:F表示秃鹫已经吃饱,t表示当前迭代次数,T表示最大迭代次数,z为-1~1 的随机数,h为-2~2 的随机数,rand1为0~1 的随机数。当F的值大于1 时,秃鹫在不同区域寻找食物,AVOA 进入探索阶段;当F值小于1,AVOA 进入开发阶段。
(3)探索阶段,在AVOA 中,秃鹫可以检查不同的随即区域,主要是基于两种不同的策略,并用p1参数来选取任一策略,取值在0~1,公式如下:
式中:P(t+1) 为秃鹫更新后的位置,X为0~2 均匀分布的随机数。
(4)开发阶段,在AVOA 中,开发阶段主要分为两部分,其开发策略主要是由P2和P3两个参数确定位置参数更新公式,两个阶段数学公式如下:
第一阶段:
第二阶段:
1.3 随机配置网络
SCN 是一种在监督机制下增量生成式网络,已被证明具有通用的逼近性质。其基本思想是从一个小网络开始,在不等式监督机制下逐步添加新的隐藏节点,直到达到预设容差,其基本结构如图1所示。

图1 随机配置网络结构图
给的目标函数f:Rd→Rm,假设已经构造了具有L-1个隐藏层神经元节点的SCN 模型,即
式中:f0=0,βj=[βj,1,···,βj,m]T为第j个隐含层节点的输出权重;gj为第j个隐含层节点的激活函数;wj和bj分别为第j个隐含层节点的输入权重和偏置项。
当前模型输出与真实值之间的残差表示为
如果eL-1没有达到预设误差,需要在如下的监督机制下生成一个新的隐藏层节点。
然后采用如下公式计算新节点的输出权重,更新模型。
2 基于VMD 和AVOA-SCN 的齿轮箱故障诊断步骤
针对齿轮箱故障诊断中的特征提取困难问题,提出采用VMD 分解信号,获取其本征模态分量,然后采用相关系数筛选出包含故障信息明显的模态分量,并计算其样本熵,构造特征向量。针对随机配置网络权重随机初始化会导致网络预测结果的不稳定性问题,提出采用非洲秃鹫优化算法对随机配置网络节点初始权值和偏置选取方式进行优化,以寻找出一个更好的网络权值和偏置矩阵,以提高网络的预测精度和稳定性。算法步骤及流程如图2。
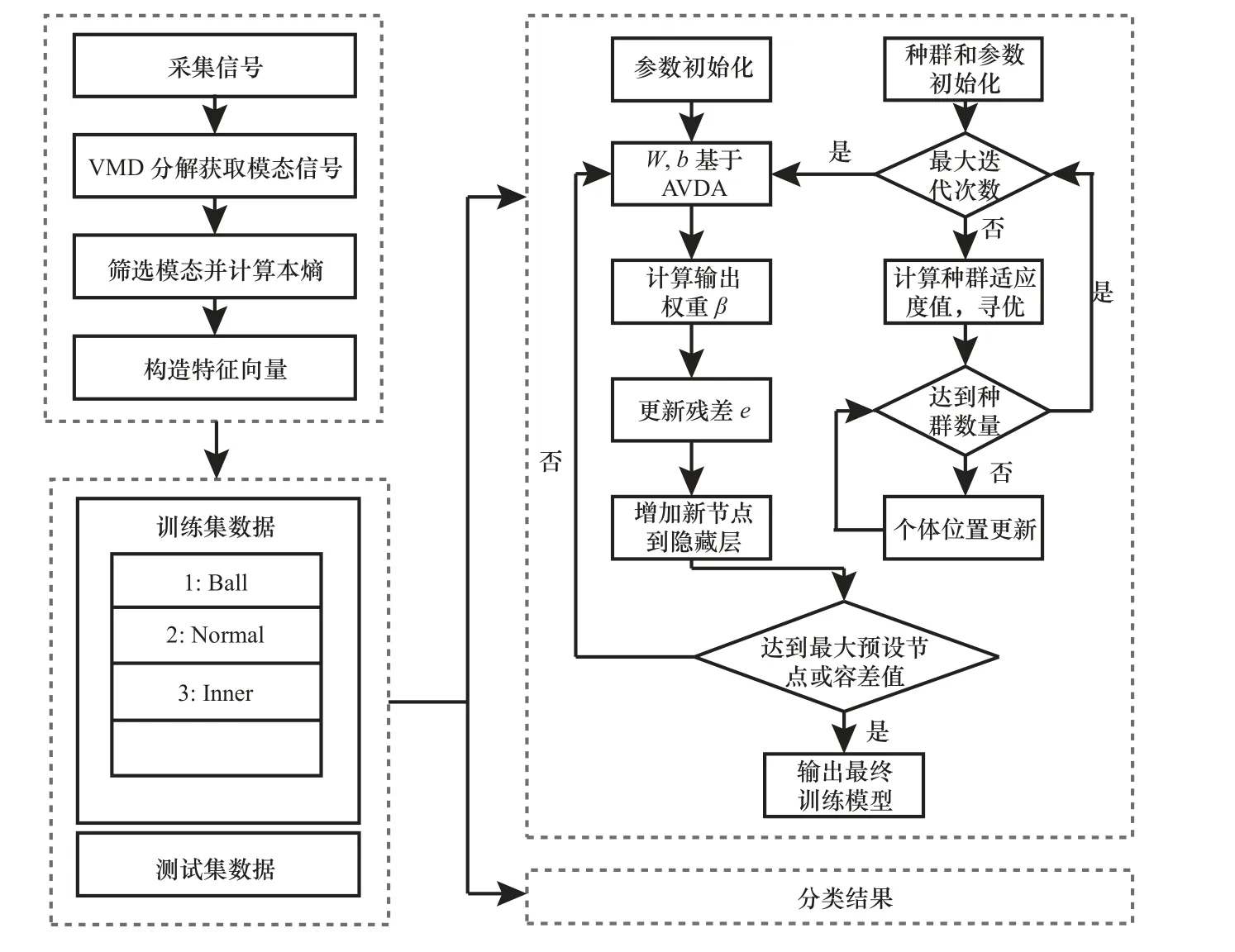
图2 模型流程图
(1)采集齿轮箱振动信号,通过VMD 分解,得到一系列IMF 分量,筛选并计算样本熵,构建特征向量,见式(1)~式(6)。
(2)初始化种群大小pop,最大迭代次数Tmax,轮盘赌决策参数L1和L2,秃鹫决策参数p1、p2和p3,上界ub和下界lb,最大隐藏层参数Lmax,容差 ε等重要参数。
(3)根据上界和下界随机生成种群,计算适应度值,并通过式(7)~式(12)进行迭代更新,达到最大迭代次数后,返回此次最优的w和b。每个个体的适应度值可以通过如下公式计算:
式中:eq为网络残差第q列,ht为隐藏层输出。
(4)看w和b是否满足监督机制,若满足则增加节点到网络中,并根据式(14)~式(16)更新网络。
(5)SCN 是否达到最大节点数或满足预设容忍误差,若未达到返回步骤(3),若达到输出SCN 结果。
3 实验验证与分析
3.1 实验平台介绍
本研究数据采用由传动故障诊断综合实验台(DDS)采集的振动数据,如图3 所示。该实验台各部分组件都可以拆装,可以进行齿轮故障和轴承故障仿真实验。本次实验设定电机转频为35 Hz,信号采样频率为12.8 kHz。共设置了8 种工况,分别为轴承滚子磨损、齿轮齿面磨损、齿根裂纹、齿轮缺齿、轴承外圈故障、齿轮断齿和正常工况。每类数据集共120 组样本,每组样本有2 048 个样本点,设置VMD 分解的惩罚系数 α为4 000,分解层数k为10,用VMD 分解每个大小为120 ×2 048 的数据,获取并筛选8 个能充分代表故障类型的模态分量,计算样本熵,以所得样本熵为特征向量构造数据集,按3∶1 划分训练集和测试集,具体见表1。
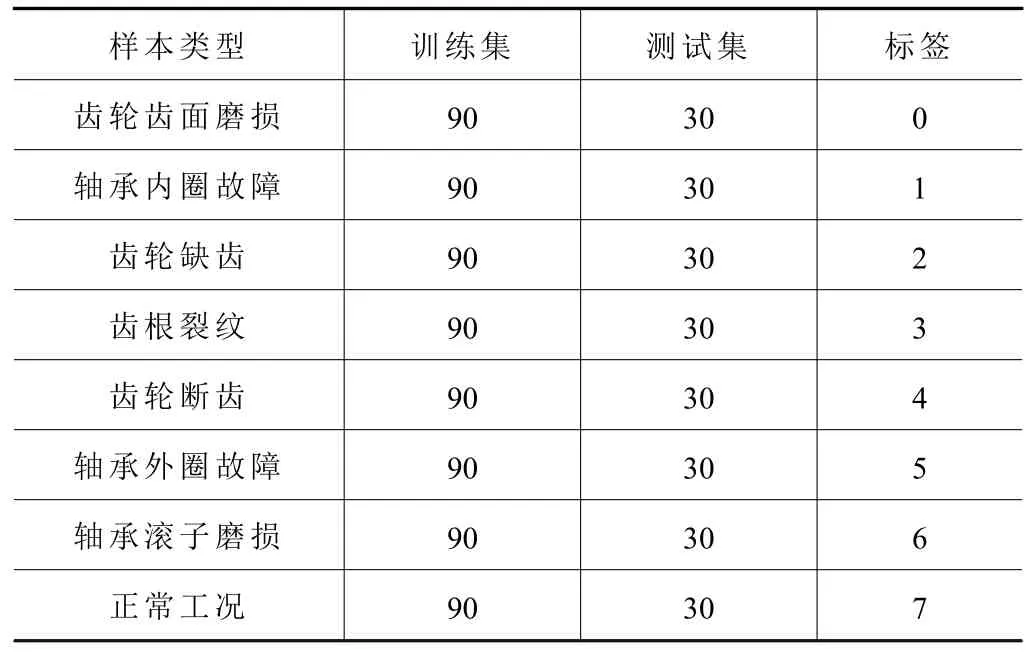
表1 数据集
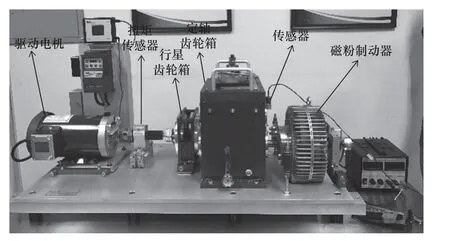
图3 DDS 实验台
3.2 实验结果及分析
实验数据构建完成后,用VMD 算法进行分解,图4 和图5 以实验数据中轴承外圈故障为例展示VMD 分解算法的分解性能。可看出,VMD 算法可实现本征模态分量(IMF)的有效分离以及划分信号频域。

图4 信号分解后对应IMF 分量时域图

图5 各分量的中心频率
通过多次实验,模型训练阶段结果如图6 所示,其中横坐标代表隐藏节点数量,纵坐标为训练集准确率和均方根误差,其中虚线代表模型训练阶段的均方根误差,实线代表训练集准确率。从图6 中可以看出,随着隐藏层节点数的增加,模型误差逐渐降低,训练集分类准确率逐步提升并趋于稳定,最终达到99.58%,证明了所提出模型的有效性。

图6 AVOA-SCN 训练集结果
为验证所提方法的准确性与稳定性,选取5 个分类器,分别是SCN、RVFL、ELM、BP、SVM,用表1 所构造的数据集进行实验,图7~图12分别显示了表1 所构造的数据集中测试集数据在各分类器下的混淆矩阵,表2 为各分类器直观的训练集、测试集、平均准确率。从表2 中可看出,在VMD 分解下,AVOA-SCN 相比于其他分类器具有最高的分类准确率和最低的准确率差值,其中AVOA-SCN 的训练集、测试集、平均准确率分别为99.58%、98.33%、98.58%。故从表2 给出分类器的比较中可以证明文中所提模型具有更好的准确性和稳定性。

表2 基于VMD 分解下数据训练集、测试集、平均准确率
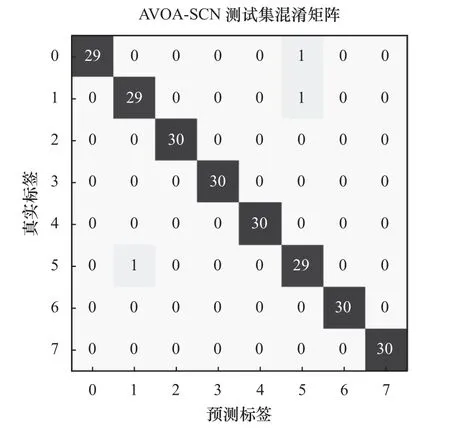
图7 AVOA-SCN 测试集结果

图8 SCN 测试集结果
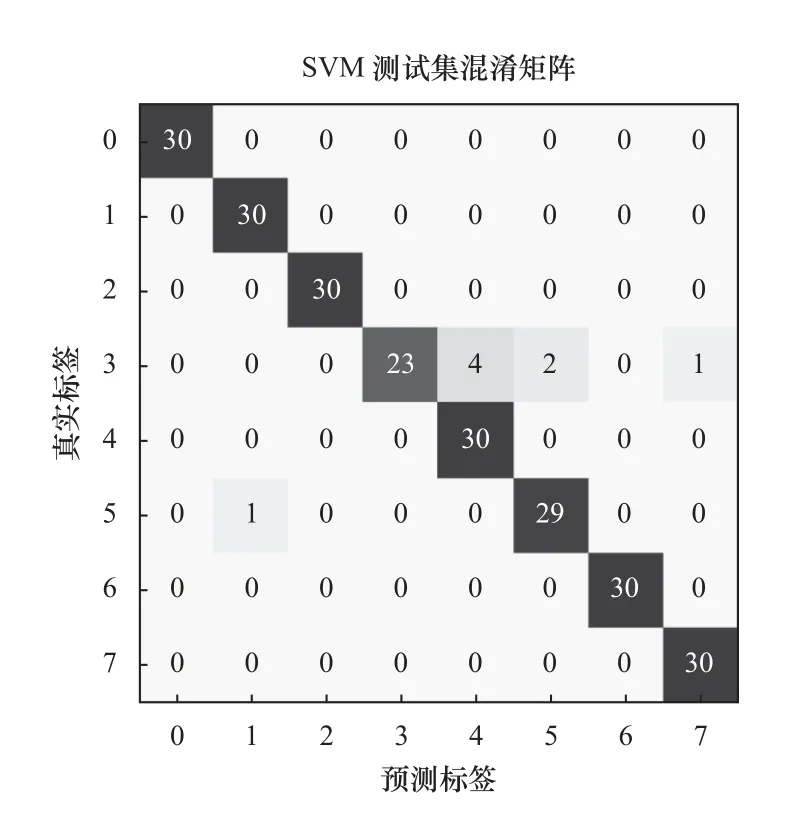
图9 SVM 测试集结果

图10 RVFL 测试集结果

图11 ELM 测试集结果
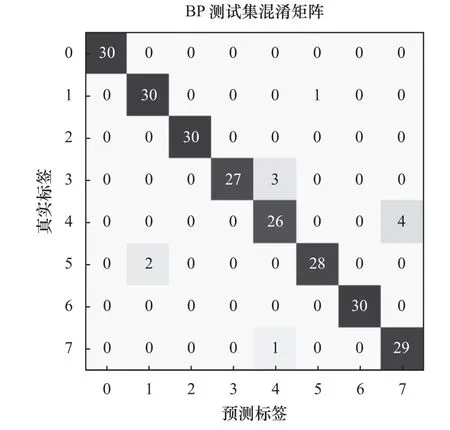
图12 BP 测试集结果
4 结语
本文针对齿轮箱故障特征提取困难问题,提出了用VMD 分解处理振动信号,获取其故障特征,对于随机配置网络中节点权重和偏置随机初始化,可能导致模型网络预测结果的不稳定问题,提出用非洲秃鹫优化算法预选节点的权值和偏置,两者结合构建了VMD-AVOA-SCN 的故障诊断模型。通过实验验证所提方法能够准确、有效地进行齿轮箱故障模式识别。通过与SCN、BP、RVFL、SVM、ELM间的比较,表明所提出的模型在齿轮箱故障诊断方面具有更好的性能,具有一定的实际应用价值。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
山东冶金(2022年3期)2022-07-19
中国信息化(2022年5期)2022-06-13
中学政史地(2021年34期)2022-01-11
意林·少年版(2021年1期)2021-02-22
小哥白尼(野生动物)(2018年8期)2018-09-10
故事作文·高年级(2018年8期)2018-08-14
制造技术与机床(2017年4期)2017-06-22
北京航空航天大学学报(2016年6期)2016-11-16
风能(2016年12期)2016-02-25
