
永磁同步电机的改进粒子群优化自抗扰控制*
2023-12-11 13:03樊立萍
制造技术与机床 2023年12期
樊立萍 黄 鑫
(沈阳化工大学信息工程学院,辽宁 沈阳 110142)
永磁同步电机(permanent magnet synchronous motor,PMSM)具有控制简单、效率高、动态响应快和损耗低等优点,被广泛应用于汽车、机床和航天等领域。随着现代电力电子技术和永磁材料的快速发展,永磁同步电动机的应用越来越广泛,在高端制造领域,对永磁同步电机的高精度控制要求也越来越高[1-2]。然而,永磁同步电机本质上属于非线性、强耦合、多变量系统,存在较大的控制难度,常规控制方式下往往难以达到满意的控制效果。为了使其达到令人满意的动态性能,设计合适的先进控制算法至关重要。
目前,永磁同步电机的基本控制方法主要包括恒压频比控制、矢量控制和直接转矩控制等。传统的永磁同步电机矢量控制也称为磁场定向控制(FOC),通过坐标变换将定子电流分解为励磁分量和转矩分量,速度环和电流环分别采用比例积分(PI)控制器,然后利用空间矢量脉宽调制(SVPWM)技术对定子电压进行控制,从而达到模拟直流电机控制的目的。虽然PI 控制器有结构简单、方便易行等优势,但目前而言,设置较精确的PI 控制器参数实际仍属于难度较大的工作,而且PI 控制器的在线自适应能力根本无法满足变化的工况要求。
自抗扰控制(active disturbance rejection control,ADRC)是一种能够综合有效地处理各种非线性、不确定性、扰动性等问题的新型控制方法[3-5]。ADRC 的关键思想是将模型不确定性和外部干扰视为总干扰[6],将总扰动作为附加状态,通过扩展状态观测器(extended state observer,ESO)对其进行估计,再由非线性状态误差反馈(nonlinear state error feedback,NLSEF)进行补偿以消除误差,从而提高控制性能。由于具有结构简单、抗干扰能力强、控制性能优异等优势,ADRC 得到了越来越多的关注。然而,ADRC 中的强非线性函数导致参数含义不明确、理论分析困难、计算复杂度高等问题,且容易引起控制器抖振,对系统的控制精度以及鲁棒性都有很大的影响[7-8]。
本文针对永磁同步电动机的高精度控制要求,首先引入一种新的非线性函数构造ADRC 环节;然后通过改进粒子群算法对观测器和非线性状态误差补偿进行实时参数整定,从而进一步提高ARRC 的控制性能。
1 永磁同步电机模型
在忽略电机铁芯的饱和、不计电机中的涡流和磁滞损耗、电机中的电流为对称三相正弦波的条件下,永磁同步电机在d-q坐标系下的定子电压和磁链方程可表示为[9-10]
式中:ud、id分别表示d轴下的定子电压和电枢电流;uq、iq分别表示q轴下的电压和电流;Rs为定子电阻;Ld、Lq分别为d、q轴的定子电感;ωe为电机的电角速度;ψd、ψq分别表示d、q轴的定子磁链,ψd=Ldid+ψf,ψq=Lqiq,ψf为永磁铁产生的磁链。
永磁同步电机在d-q坐标系的电磁转矩表示为
对于表贴式永磁同步电机,定子电感满足Ld=Lq=Ls的关系,其中Ls为定子电感。当采用矢量控制方式时,电磁转矩公式可以进一步简化为
式中:pn表示电机的极对数。当采用id=0 的矢量控制策略时,永磁同步电机的控制系统结构如图1所示。

图1 永磁同步电机矢量控制
永磁同步电机的转子动力学方程为
式中:TL为电机的负载转矩;J为电机的转动惯量;B为电机的阻尼系数;ω为电机的机械角速度;ωe=pnω。根据上述关系,可将角速度表示为
令b=1.5pnψf/J,f=-TL/J-Bω/J,则可将式(5)的角速度表示为
选取ω作为状态变量x1,总扰动f作为状态变量x2,q轴电流iq作为输入控制量u,则可将角速度状态方程表示为
2 自抗扰控制器改进
2.1 ADRC 结构设计
自抗扰控制器主要由跟踪微分器(tracking differentiator,TD)、扩展状态观测器(ESO)和非线性状态误差反馈(NLSEF)构成[11],如图2 所示。TD 环节可以实现对目标的无超调快速跟踪。自抗扰控制器设计中,将系统内部和外部扰动及未建模部分的误差统一视为总干扰,通过ESO 环节对其进行观测和补偿;NLSEF 环节则比较目标信号与TD 的差值和系统输出及其与ESO 的差值,并根据获得的误差生成控制信号。TD 可以实现对目标的无超调快速跟踪。图2 中,TD 的输入信号v0对应永磁电机的角速度设定值ωref(ωref=2πnref,nref为给定转速)。自抗扰控制器的输出u即施加于永磁电机的控制信号(u=iq),输出变量y对应永磁同步电机的角速度ω。
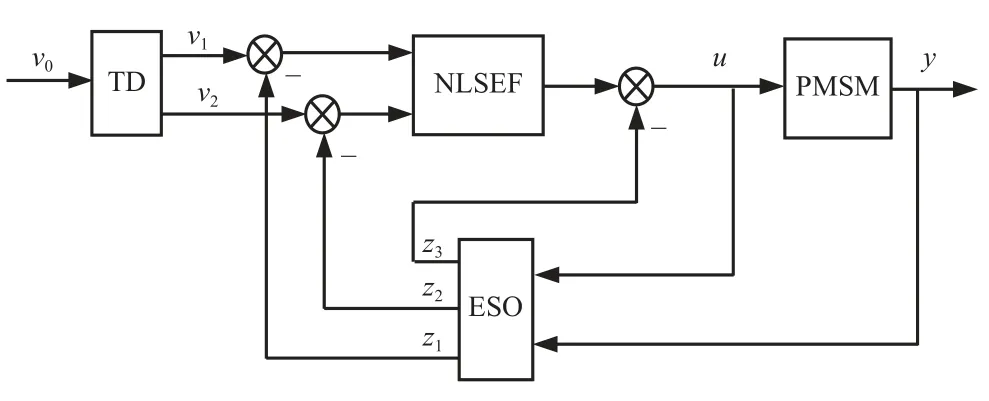
图2 永磁同步电机自抗扰控制系统
2.2 TD 设计
TD 通过ADRC 中的非线性函数来实现输入信号广义导数的平滑逼近。二阶TD 算法的离散形式如下:
式中:h为积分步长;r为速度算子;λF为滤波因子;v1是输入信号的v0的跟踪信号;v2是v1的差分信号;fhan()是1 种非线性最速控制综合函数,用以避免过渡过程的超调。根据控制要求,可将fhan()函数表示如下:
2.3 非线性函数构造
扩展状态观测器的核心部分是1 个非线性函数,它能够很好地抑制扰动的影响,将输出稳定控制在目标值。传统自抗扰控制器中,这个非线性函数多采用fal函数[12]。fal函数是一种特殊的非线性结构,可表示为
式中:e为偏差信号;α为非线性因子;一般取0~1 的常数;δ为滤波因子。
传统fal函数在原点附近会有拐点,因而函数的平滑度较差。因此,本文对非线性函数fal进行一定的优化,优化后的非线性函数记为nfal,表示如下:
fal和nfal两个非线性函数都是关于原点对称的,但nfal函数曲线的过渡过程更加平滑。本文的二阶离散自抗扰控制器基于nfal进行设计。
2.4 ESO 改进
ESO 是ADRC 的核心,可以通过反馈中的补偿作用对未知干扰和未建模动态进行估计,得到每个状态的估计值,进而达到目标重构的目的。
二阶状态观测器ESO 可以表示为
式中:z1为永磁电机角速度观测值;z2为总扰动观测值;e为观测误差;b为补偿因子。
为进一步改进自抗扰控制器的控制性能,在新构建的非线性函数newfal 基础上对三阶扩展状态观测器进行设计,其离散算法表示为
式中:z1、z2、z3分别表示输入变量、输入变量的差分及总扰动观测值;h0为采样步长;β10、β20、β30分别为ESO 的3 个可调非线性增益参数。
2.5 NLSEF 改进
NLSEF 方案是一种独立于被控对象数学模型的新型状态误差反馈控制律。结合改进后的非线性函数,NLSEF 算法设计如下:
式中:u0为非线性补偿模块;z3/b为扰动补偿项。
2.6 粒子群算法改进
粒子群优化算法(PSO)是一种基于随机种群的优化算法,通过模拟昆虫等动物的社会行为[13-14],可以根据环境的变化更新粒子的位置和速度,满足粒子的接近性和质量要求。由于PSO 简单、高效且鲁棒性好且具有全局搜索能力,被证明是最有效的自然启发算法之一,用于处理无约束和有约束的单目标或多目标全局优化问题[15-16]。
选取合适的适应度函数作为评判标准,每个粒子在第k步时找到最佳位置pbest,对比整个种群的所有个体最优解,选取最佳值作为群体最优位置gbest,则粒子i在k+1 步时的速度和位置由式(15)决定:
式中:w为惯性权重,反映迭代过程中后一时刻移动速度受前一时刻移动速度影响的大小;c1表示个体自我认知的大小;c2表示群体认知的大小;Vi(k)表示第k次迭代的速度;Xi(k)表示粒子i在第k次迭代的位置。永磁同步电机的粒子群改进自抗扰控制系统构成如图3 所示,IPSO 代表改进的粒子群算法。
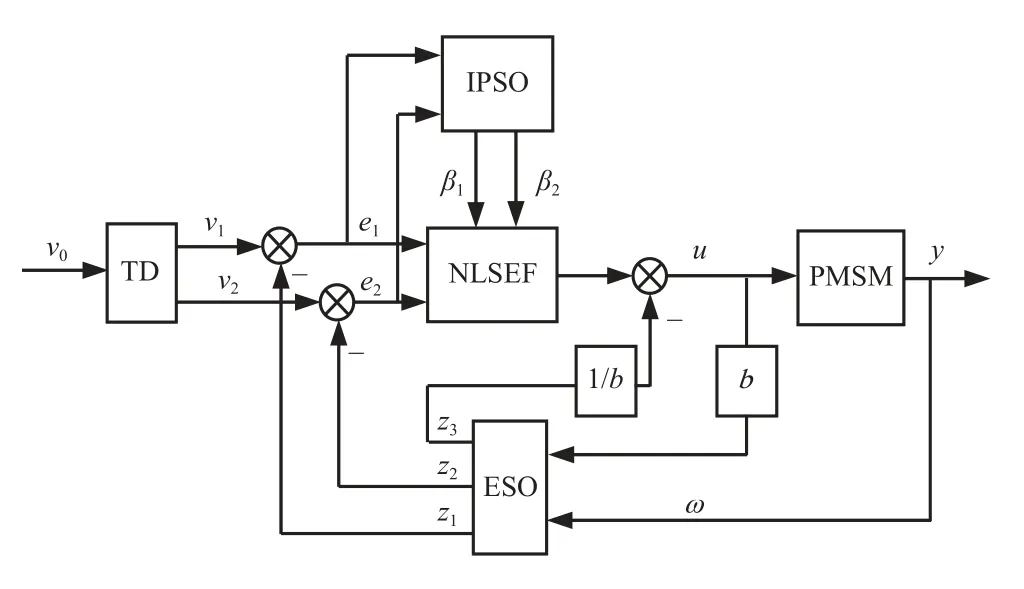
图3 粒子群改进自抗扰控制系统
ADRC 的上升阶段主要受TD 环节的影响,故将适应度函数定义为系统从上升时间至采样结束这个阶段的响应值与期望值之间的误差累积和,即:
式中:tr为阶跃响应上升时间;T为采样周期。
传统粒子群算法中,惯性权重w的取值范围一般在0.4~0.95,采用线性递减法,可表示为
式中:kmax为最大迭代次数;wmax和wmin分别代表惯性权重的最大值和最小值。惯性权重w较大时,粒子搜索范围较广,全局搜索能力较强;w较小时,粒子搜索范围较窄,局部搜索能力较强。搜索初期,惯性权重w可设置较大值,以提高全局搜索能力;随着搜索过程的推进,最佳目标逐渐逼近,搜索范围逐渐缩小,w应适当减小,以加强局部搜索能力。基于此,对传统PSO 进行改进,采用非线性sigmoid 函数(即f(x)=1/(1+e-x))作为w的变化规律,通过调整sigmoid 函数的系数,将w的取值范围调整为[0.4,0.95]。w的非线性递减模式表示为
在常规粒子群优化算法中,学习因子c1和c2在整个搜索过程中是固定的,选择不当会严重影响优化性能。为进一步提高PSO 算法的性能,将c1和c2设计为根据迭代次数线性变化,变化规律描述如下:
3 仿真运行与结果分析
为了验证本文所提出的粒子群优化自抗扰控制器对永磁同步电机的有效性,在Matlab/Simulink仿真环境下分别对在PI、自抗扰及改进粒子群优化自抗扰3 种不同控制模式下的1 个实际永磁同步电机进行了仿真运行。运行中,永磁同步电机的电流环均采用了PI 控制器并始终保持不变,而速度环分别采用了PI、ADRC 和改进粒子群优化自抗扰控制器(IPSO-IADRC)。改进粒子群算法主要用于优化ADRC 的参数,粒子群种群大小定为2,迭代次数设置为20。IPSO-IADRC 的主要设计参数见表1。
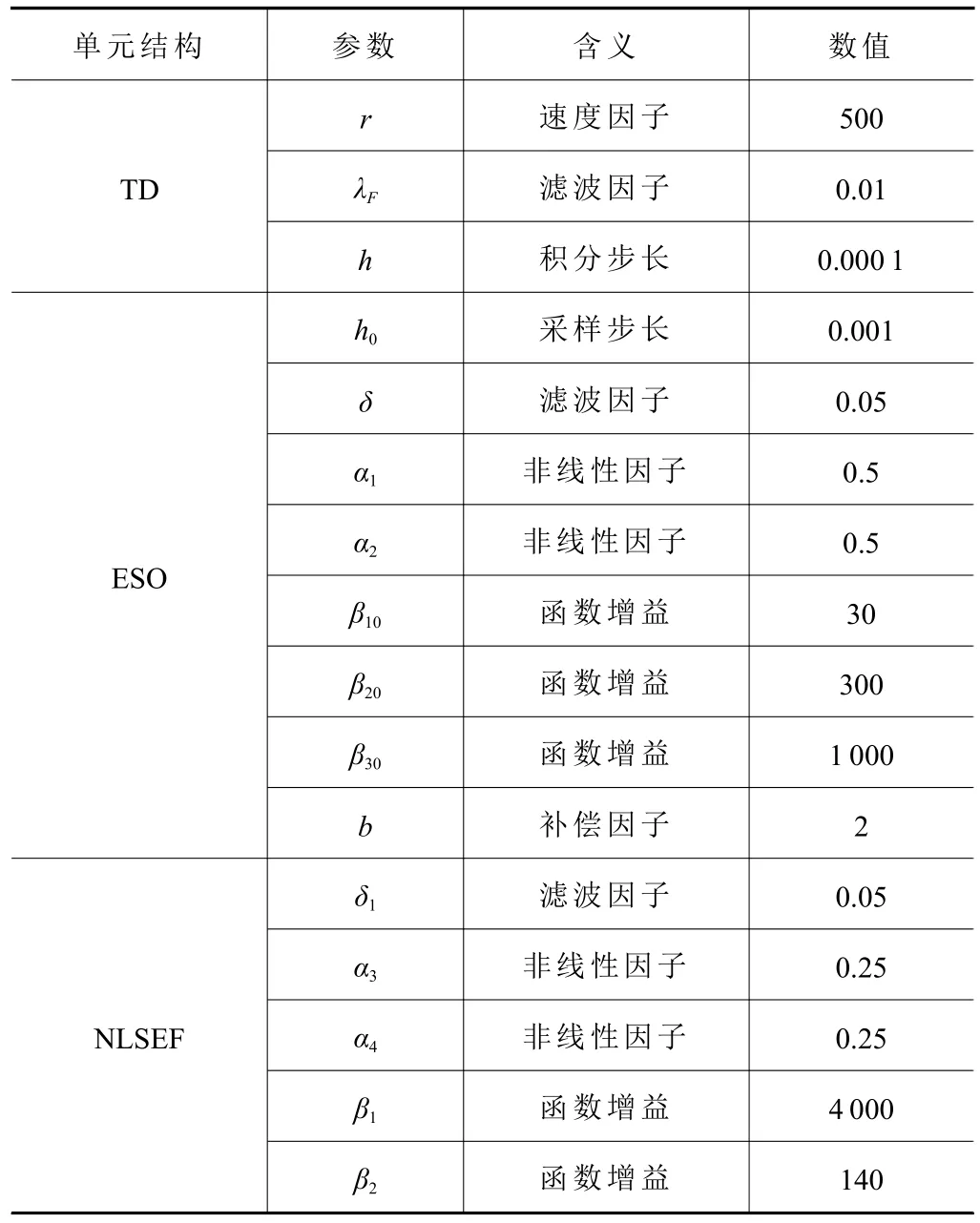
表1 IPSO-ADRC 参数
为了测试不同控制器作用下永磁电机的启动性能和带载能力,仿真实验的运行模式设定为空载启动和带载运行2 个阶段。实验中,电机的给定转速设置为nref=1 000 r/min。为进一步考察3 种不同控制方案的抗干扰能力,在t=0.03 s 时施加TL=7 N·m的外加负载。3 种不同控制器作用下的永磁同步电机的转速变化情况如图4 所示,启动阶段的转速跟踪误差曲线如图5 所示。其中,变量en表示永磁同步电机的转速误差(en=nref-n)。仿真运行中所采用的永磁同步电机的主要参数见表2。
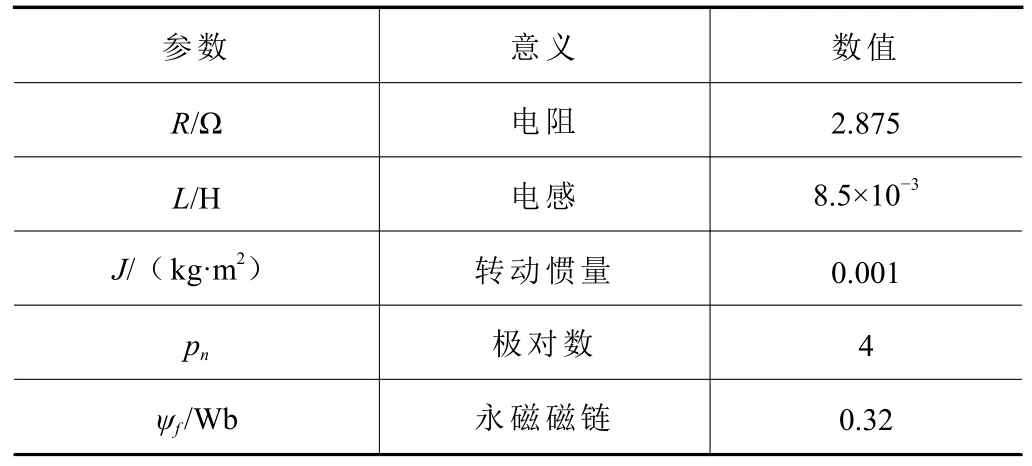
表2 永磁电机主要参数
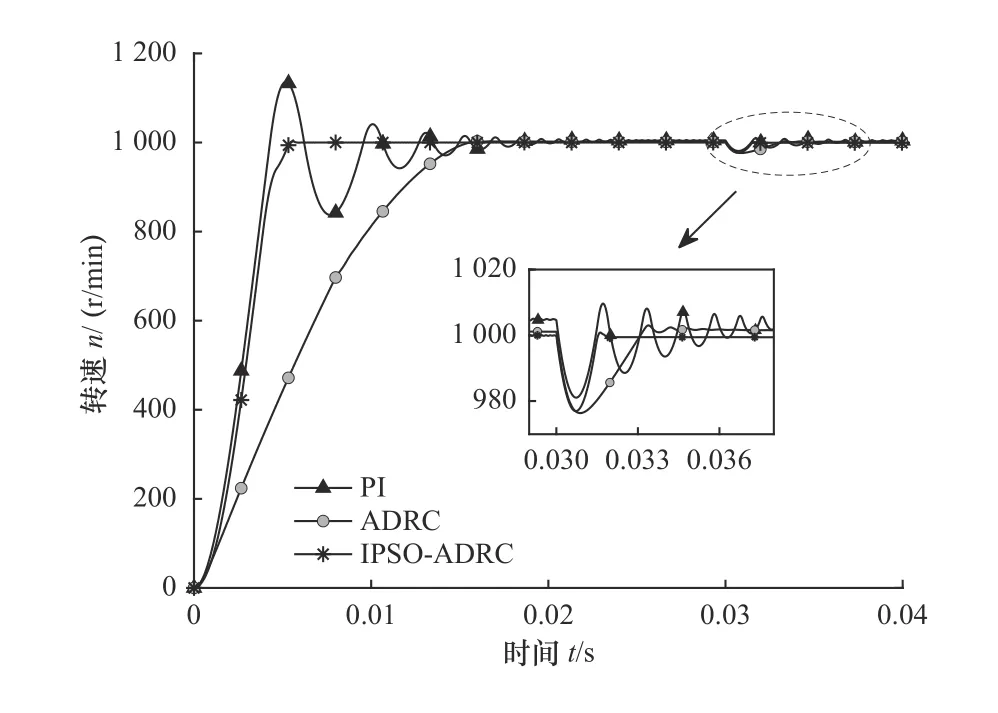
图4 永磁同步电机的转速曲线
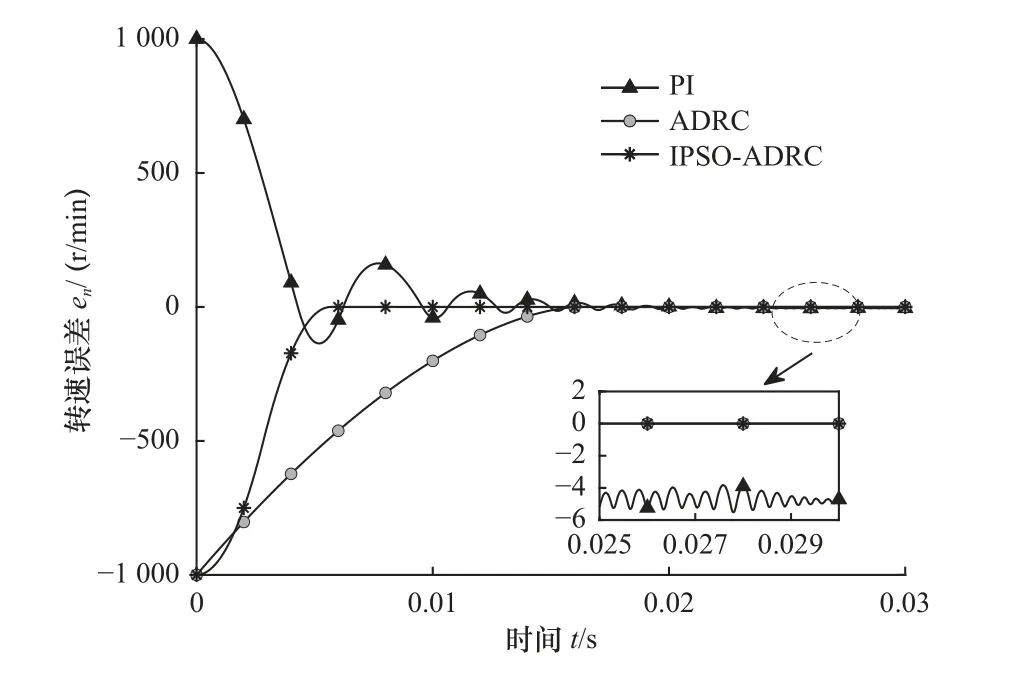
图5 跟踪误差曲线
由图4 和图5 的运行结果可以看出,PI 控制下的永磁同步电机的启动过程超调量较大,过渡时间较长,稳态误差较大,且存在一定的稳态波动;ADRC 控制无明显超调,能够较快到达稳定状态,且不存在稳态波动和稳态误差,但过渡过程仍较久;而改进粒子群优化ADRC 既无明显超调,跟踪速度、稳态误差等指标也都得到显著改善。3 种不同控制方式下永磁同步电机系统的主要性能指标见表3。可以看出,改进粒子群优化自抗扰控制的响应速度、稳态误差等各项性能指标均明显优于改进前的常规自抗扰控制方法。
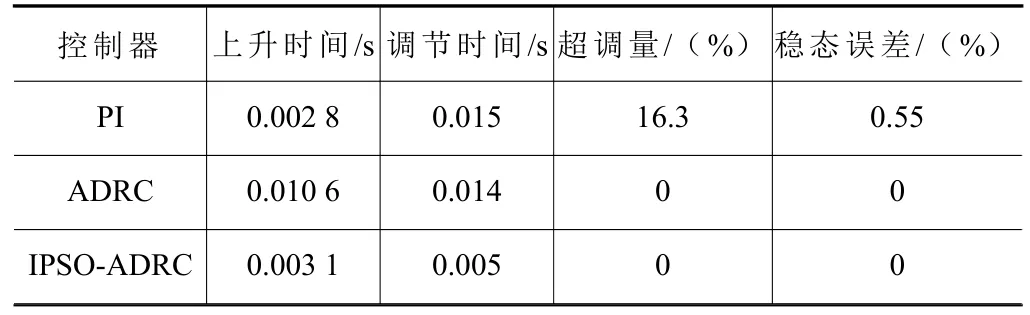
表3 主要性能指标
由图4 可以看出,在负载发生突变的瞬间,3种控制方式下的永磁同步电机的转速均在一定程度突然偏离其稳态工作点,但经过一定时间的调整后均能重新回到原稳定点。PI 控制下,这个遭受扰动后的调整过程较长,转速波动频率高,且重新达到的稳态仍存在波动和误差。ADRC 在一定程度上缩短了扰动后的调整时间,调整后可以无差稳态在设定工作点,但扰动引起的瞬间超调量较大。IPSOADRC 使遭受扰动的永磁同步电机重新回到稳定状态所需的调整时间最短,且重新稳定后不存在稳态误差。因此,IPSO-ADRC 的抗扰能力在3 种控制方法中也是最强的。
4 结语
针对永磁同步电动机的高精度控制要求,提出了一种改进自抗扰控制方法,通过改进粒子群优化算法对状态观测器和非线性状态误差补偿进行参数整定,并通过构造新型非线性函数提高状态观测器的控制率。基于改进粒子群优化算法的自抗扰控制器能够控制永磁同步电动机以最快的速度无差稳定在设定工作点,跟踪速度、跟踪精度、超调量和抗干扰能力等各项动静态性能指标均得到显著改善,有效提高了永磁同步电机的控制精度,为满足数控机床、机器人及机车传动等实际永磁同步电动机应用系统的高精度运行要求提供了有效途径。下一步,将构建永磁同步电机实验系统,应用本文方法对实际永磁同步电机系统进行优化控制。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
数学物理学报(2019年4期)2019-10-10
贵州师范学院学报(2016年3期)2016-12-01
光学精密工程(2016年3期)2016-11-07
电源技术(2015年11期)2015-08-22
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
